实时车速测量系统
- 格式:ppt
- 大小:2.10 MB
- 文档页数:18
车辆限速系统解决方案概述车辆限速系统被广泛应用于道路交通管理上,它可以保障行车安全,预防交通事故的发生。
车辆限速系统的核心是限速装置,通过安装限速装置对车速进行限制,并将车速信息传输给后台系统,实现对车辆的实时监控。
本文将介绍几种常用的车辆限速系统解决方案。
方案一:GPS定位限速系统GPS定位限速系统是一种基于GPS技术的车辆限速系统,利用卫星定位技术获取车辆的位置和速度信息,通过与地图底图比对,判断车辆当前行驶路段的限速规定,若车辆超速行驶,则限速装置会将车速控制在规定限速范围内。
GPS定位限速系统的优点是适用范围广,可以覆盖大部分道路,精度较高,且无需进行线路改造,更适合大规模推广。
方案二:激光雷达限速系统激光雷达限速系统是一种使用激光传感器监测车辆速度的车辆限速系统,包括一个激光传感器和一个计算机,工作原理是通过激光传感器测量车辆的速度,将速度信息传输给计算机,计算机对速度进行控制。
激光雷达限速系统精度高,可以达到0.1km/h,反应速度快,可以实现毫秒级延迟,但是需要进行线路改造,成本较高。
方案三:机械限速系统机械限速系统是一种通过机械结构对车速进行限制的车辆限速系统,包括一个限速盒和传动装置。
当车辆超速行驶时,限速盒会自动打开,传动装置会从发动机输出轴上抬起一块离合器,使车辆的速度得到控制。
机械限速系统操作简单,无需进行线路改造,但是精度较低,安全性能较差,随着使用时间的增长,限速盒的损坏率较高,需要经常维护。
综合比较综合以上三种方案,GPS定位限速系统精度高,适用范围广,成本较低,更适合各类车辆的限速控制和大规模推广。
而激光雷达限速系统精度更高,但成本较高,适用范围较窄,更适合安装在高速公路等特定路段。
机械限速系统虽然成本低,但是限速控制精度低,安全性能差,更适合低速车辆使用。
总体来说,选择车辆限速系统需要根据实际需要进行选择,选择合适的方案可以保证车辆行驶的安全和道路交通的顺畅。

猱社科枚Journal of Green Science and Technology 第4期2020年2月车辆速度检测装置的设计李红岭,高晓阳,张华,王关平(甘肃农业大学机电工程学院,甘肃兰州730070)摘要:针对生活■中由于车速过快驾驶员无法做出正确反应而导致的安全事故频发的问题,以STC89C52RC 单片机为核心,设计了由车辆测速模块、人机交互模块.LCD1602液晶显示以及报警电路模块组成的测量测速装置。
车辆测速模块是通过直接输出数字量的霍尔传感器,根据磁场感应强度的大小,来改变输出电压的高低。
通过单片机控制,可高精度,实时显示车轮速度,若速度超过设定值,报警电路发出警报,提醒驾驶人员应当减速行驶。
关键词:测速;单片机;液聶显示;报警电路中图分类号:TN24&2文献标识码:A文章编号:1674-9944(2020)04-0188-021引言近年来,随着我国经济的飞速发展,道路上各种家用小汽车的数量增长迅速,随之而来的交通事故愈发频繁,造成的人员伤亡数目巨大。
据统计,超速行驶是造成各种交通事故的主要原因之一,我国公路条件复杂,不同等级的公路允许的最高速度不同,而且超速行驶的随机性很大,给交警的纠章造成困难,现有的公路电子测速装置只能检测车辆是否超速,事后给予处罚,避免不了事故的发生。
针对这种状况,开发具有智能决策模块的汽车测速装置前景广阔"'幻。
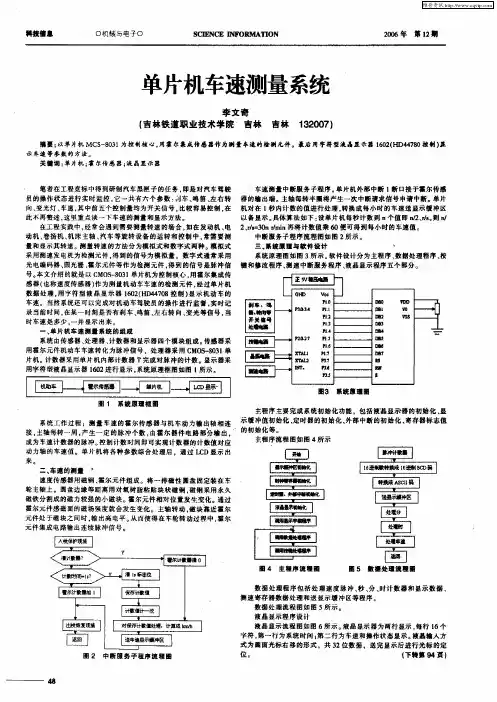
2系统方案如图1所示,系统以单片机STC89C52RC为控制核心》匕用霍尔集成传感器作为测量车辆速度及里程的方法检测元件,经过单片机数据处理,用字符型液晶显示器LCD1602显示车辆速度及里程。
通过按键输入最高限速,超限速的情况报警电路发出警报,提醒驾驶员。
3硬件电路设计硬件部分较重要的是测速部分,霍尔传感器采用A3144集成霍尔开关,磁钢用直径D=5mm,长度为L =3mm的磁钢。
如图2所示机轴圆盘的边缘安有一个磁钢,测量转速的霍尔传感器安装靠近边缘的磁钢,机轴每转1周,产生一定的脉冲个数。
电动车测速原理
电动车的测速原理是通过感知车辆运动的速度来进行测量。
常见的测速原理包括车速传感器、GPS定位系统和惯性传感器。
车速传感器是安装在电动车的车轮上的装置,它可以感知车轮的转动速度。
根据车轮转动的速度,车速传感器可以计算出车辆的实时速度。
这种测速原理一般使用于较旧的电动车型。
GPS定位系统是利用全球卫星定位系统,通过接收来自卫星
的信号来确定车辆的位置和速度。
GPS定位系统可以在车辆
行驶过程中实时测量车辆的速度,因此也可以用来作为电动车的测速原理之一。
不过,GPS定位系统的精确度受到环境信
号干扰的影响。
惯性传感器则是利用车辆加速度传感器实时测量车辆的加速度,并利用加速度和时间的关系来计算出车辆的速度。
惯性传感器可以独立于车轮转动而测量车速,因此适用于各种类型的电动车。
需要注意的是,不同的电动车型可能采用不同的测速原理,具体的测速原理需要根据电动车的设计和配置来确定。
此外,测速原理的准确性也受到其他因素的影响,如传感器的精度、环境条件和数据处理算法等。
因此,在进行电动车测速时,应该结合多种测速原理进行配合,才能获得比较准确的车辆速度数据。
智能交通系统的发展与应用正在为城市交通管理带来革新。
其中,准确测量车辆行驶速度是智能交通系统的重要功能之一。
本文将从多个角度讨论如何使用智能交通系统准确测量车辆行驶速度,包括传感器技术、数据处理和实时监测。
一、传感器技术准确测量车辆行驶速度的基础是高精度的传感器技术。
目前,常用的传感器包括雷达、摄像头和地磁传感器等。
雷达传感器通过测量车辆与传感器之间的距离差异来计算车辆速度,其优点在于不受天气影响,适用于各种道路条件。
摄像头传感器则利用图像处理技术来提取车辆轨迹,进而计算车辆速度。
地磁传感器则可以通过感知车辆引起的地磁场变化来间接测量车辆速度。
不同的传感器技术可以根据具体需求灵活选择,以实现对车辆行驶速度的准确测量。
二、数据处理准确测量车辆行驶速度不仅依赖于传感器技术,还需要进行数据处理和分析。
传感器获取的原始数据需要进行滤波、去噪和校正等处理,以消除干扰和提高测量的准确性。
同时,可以借助机器学习和数据挖掘技术,通过分析大量车辆数据来建立模型,预测车辆行驶速度。
数据处理的关键在于提高算法的精度和效率,以实现高精度的车辆速度测量。
三、实时监测智能交通系统通过实时监测车辆行驶速度,可以及时掌握道路交通状况,为交通管理部门提供决策支持。
通过在道路上布置传感器,并将获取的数据传输到中心服务器进行处理,可以实现对车辆行驶速度的实时监测。
监测结果可以通过交通信息显示屏、移动应用程序等形式向用户展示,帮助驾驶员选择最佳路线,减少拥堵和交通事故的发生。
四、应用前景智能交通系统准确测量车辆行驶速度的应用前景广阔。
首先,通过实时监测车辆行驶速度,可以提供实时的交通信息,方便驾驶员规划行程。
其次,准确测量车辆行驶速度可以帮助交通管理部门进行路况评估和拥堵监测,为城市交通管理提供科学依据。
此外,根据车辆行驶速度的数据统计和分析,还可以预测道路通行状况、改进交通网络布局,优化城市交通系统。
综上所述,智能交通系统的发展为准确测量车辆行驶速度提供了有效的工具和方法。

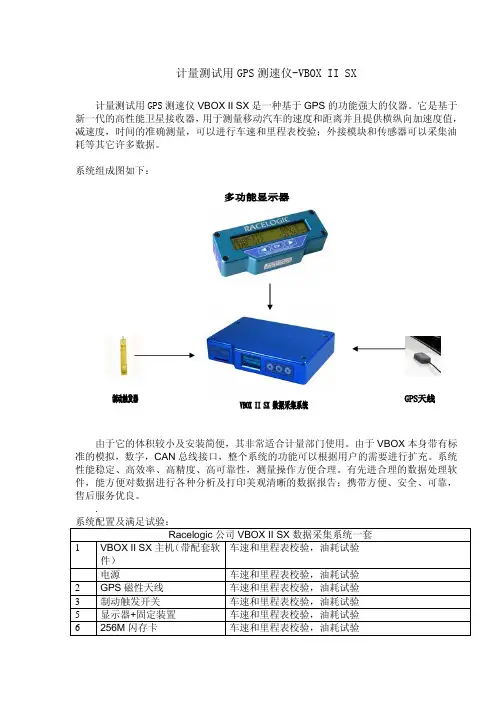
计量测试用GPS测速仪-VBOX II SX计量测试用GPS测速仪VBOX II SX是一种基于GPS的功能强大的仪器。
它是基于新一代的高性能卫星接收器,用于测量移动汽车的速度和距离并且提供横纵向加速度值,减速度,时间的准确测量,可以进行车速和里程表校验;外接模块和传感器可以采集油耗等其它许多数据。
系统组成图如下:由于它的体积较小及安装简便,其非常适合计量部门使用。
由于VBOX本身带有标准的模拟,数字,CAN总线接口,整个系统的功能可以根据用户的需要进行扩充。
系统性能稳定、高效率、高精度、高可靠性,测量操作方便合理。
有先进合理的数据处理软件,能方便对数据进行各种分析及打印美观清晰的数据报告;携带方便、安全、可靠,售后服务优良。
.系统配置及满足试验:Racelogic公司VBOX II SX数据采集系统一套1 VBOX II SX主机(带配套软车速和里程表校验,油耗试验件)电源车速和里程表校验,油耗试验2 GPS磁性天线车速和里程表校验,油耗试验3 制动触发开关车速和里程表校验,油耗试验5 显示器+固定装置车速和里程表校验,油耗试验6 256M闪存卡车速和里程表校验,油耗试验7 光栅开关及反光带区间车速可测量的参数的量程及精度:序号测量参数量程精度0.05%1 距离 --2 速度 0-1600公里/小时 0.1公里/小时0.01秒3 时间 --4 燃油消耗 0.5-100升/小时 0.5%5 加速度 ±0.25g到 ±30g0.001m/s2特点:•全套测量系统体积极小,安装简便迅速•能完成国家标准要求的车速和里程表,油耗等实验•在线显示所有测量参数•各种测量或采集到的参数可以实时显示•可根据要求设定各种不同的试验条件进行试验•制动触发形式多样,使试验更加方便• WINDOWS操作界面的设定和分析软件,使用方便•高精度、高可靠性,高耐振、抗冲击性能确保测试质量.•用GPS非接触式速度和距离测量•大容量紧凑式SD卡即时存储数据,以便后处理•绘制轨迹图,圈数定时1.4 可满足的国家标准:JJG 779-2004 车速里程表标准装置检定规程VBOX II SX GPS测速仪概述:VBOX II SX是一种功能强大的仪器。
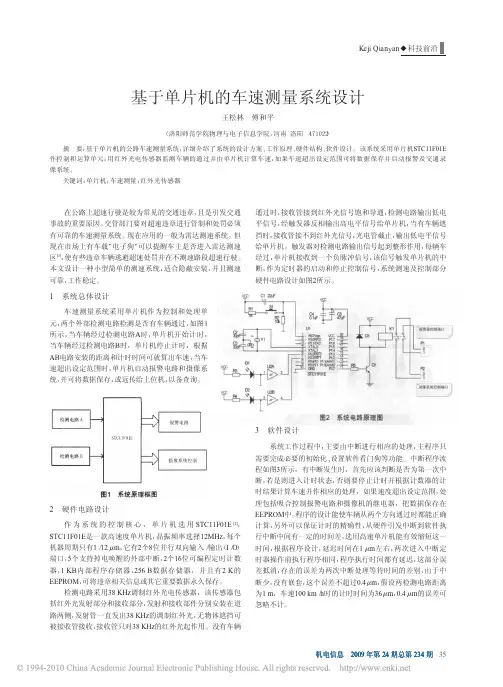
机电信息2009年第24期总第234期基于单片机的车速测量系统设计王松林傅和平(洛阳师范学院物理与电子信息学院,河南洛阳471022)摘要:基于单片机的公路车速测量系统,详细介绍了系统的设计方案、工作原理、硬件结构、软件设计。
该系统采用单片机STC11F01E作控制和运算单元;用红外光电传感器监测车辆的通过并由单片机计算车速,如果车速超出设定范围可将数据保存并启动报警及交通录像系统。
关键词:单片机;车速测量;红外光传感器在公路上超速行驶是较为常见的交通违章,且是引发交通事故的重要原因。
交管部门要对超速违章进行管制和处罚必须有可靠的车速测量系统。
现在应用的一般为雷达测速系统。
但现在市场上有车载“电子狗”可以提醒车主是否进入雷达测速区[1],使有些违章车辆逃避超速处罚并在不测速路段超速行驶。
本文设计一种小型简单的测速系统,适合隐蔽安装,并且测速可靠,工作稳定。
1系统总体设计车速测量系统采用单片机作为控制和处理单元,两个外部检测电路检测是否有车辆通过,如图1所示,当车辆经过检测电路A 时,单片机开始计时,当车辆经过检测电路B 时,单片机停止计时,根据AB 电路安装的距离和计时时间可就算出车速,当车速超出设定范围时,单片机启动报警电路和摄像系统,并可将数据保存,或远传给上位机,以备查询。
2硬件电路设计作为系统的控制核心,单片机选用STC11F01E [2],STC11F01E 是一款高速度单片机,晶振频率选择12MHz ,每个机器周期只有1/12μm ,它有2个8位并行双向输入/输出(I /O )端口,5个支持掉电唤醒的外部中断,2个16位可编程定时计数器,1KB 内部程序存储器,256B 数据存储器,并且有2K 的EEPROM ,可将违章相关信息或其它重要数据永久保存。
检测电路采用38KHz 调制红外光电传感器,该传感器包括红外光发射部分和接收部分,发射和接收部件分别安装在道路两侧,发射管一直发出38KHz 的调制红外光,无物体遮挡可被接收管接收,接收管只对38KHz 的红外光起作用。
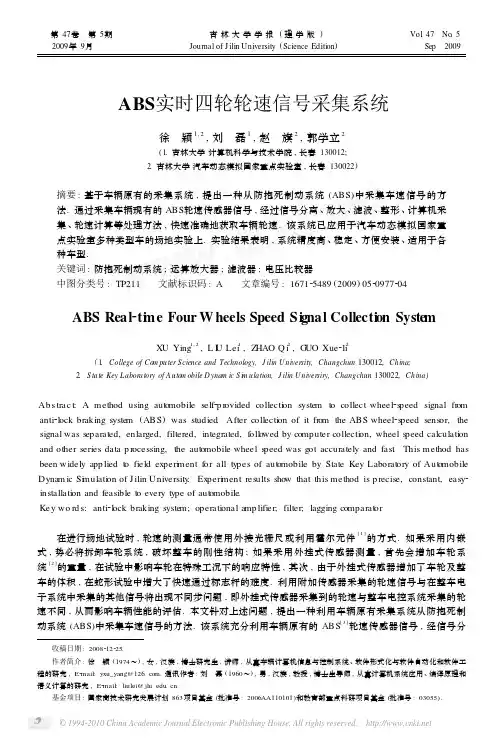
第47卷 第5期吉林大学学报(理学版)Vol.47 No.5 2009年9月Journal of J ilin University(Science Editi on)Sep 2009ABS实时四轮轮速信号采集系统徐 颖1,2,刘 磊1,赵 旗2,郭学立2(1.吉林大学计算机科学与技术学院,长春130012;2.吉林大学汽车动态模拟国家重点实验室,长春130022)摘要:基于车辆原有的采集系统,提出一种从防抱死制动系统(ABS)中采集车速信号的方法.通过采集车辆现有的ABS轮速传感器信号,经过信号分离、放大、滤波、整形、计算机采集、轮速计算等处理方法,快速准确地获取车辆轮速.该系统已应用于汽车动态模拟国家重点实验室多种类型车的场地实验上.实验结果表明,系统精度高、稳定、方便安装、适用于各种车型.关键词:防抱死制动系统;运算放大器;滤波器;电压比较器中图分类号:TP211 文献标识码:A 文章编号:167125489(2009)0520977204ABS Real2ti m e Four W heels Speed Si gnal Collecti on Syste mXU Ying1,2,L I U Lei1,Z HAO Q i2,G UO Xue2li2(1.College of Co m puter Science and Technology,J ilin U niversity,Changchun130012,China;2.S tate Key L aboratory of A uto m obile D ynam ic S i m ulation,J ilin U niversiry,Changchun130022,China)Ab s trac t:A method using aut omobile self2p r ovided collecti on syste m t o collect wheel2s peed signal fr om anti2l ock braking syste m(ABS)was studied.After collecti on of it fr o m the ABS wheel2s peed sens or,the signal was separated,enlarged,filtered,integrated,f oll owed by computer collecti on,wheel s peed calculati on and other series data p r ocessing,the aut omobile wheel s peed was got accurately and fast.This method has been widely app lied t o field experi m ent f or all types of aut omobile by State Key Laborat ory of Aut omobile Dyna m ic Si m ulati on of J ilin University.Experi m ent results show that this method is p recise,constant,easy2 installati on and feasible t o every type of aut omobile.Key wo rd s:anti2l ock braking syste m;operati onal a mp lifier;filter;lagging comparat or在进行场地试验时,轮速的测量通常使用外接光栅尺或利用霍尔元件[1]的方式.如果采用内嵌式,势必将拆卸车轮系统,破坏整车的刚性结构;如果采用外挂式传感器测量,首先会增加车轮系统[2]的重量,在试验中影响车轮在特殊工况下的响应特性,其次,由于外挂式传感器增加了车轮及整车的体积,在蛇形试验中增大了快速通过标志杆的难度.利用附加传感器采集的轮速信号与在整车电子系统中采集的其他信号将出现不同步问题,即外挂式传感器采集到的轮速与整车电控系统采集的轮速不同,从而影响车辆性能的评估.本文针对上述问题,提出一种利用车辆原有采集系统从防抱死制动系统(ABS)中采集车速信号的方法.该系统充分利用车辆原有的ABS[3]轮速传感器信号,经信号分收稿日期:2008212225.作者简介:徐 颖(1974~),女,汉族,博士研究生,讲师,从事车辆计算机信息与控制系统、软件形式化与软件自动化和软件工程的研究,E2mail:yxu_yang@.通讯作者:刘 磊(1960~),男,汉族,教授,博士生导师,从事计算机系统应用、编译原理和语义计算的研究,E2mail:liulei@.基金项目:国家高技术研究发展计划863项目基金(批准号:2006AA110101)和教育部重点科研项目基金(批准号:03055).离、放大、滤波、整形、计算机采集、轮速计算等处理,快速准确地获取车辆轮速.实验结果表明,该系统精度高、稳定、方便安装、只需要通过修改相应的参数就可以适用于各种车型.该系统目前已应用于汽车动态模拟国家重点实验室多种类型车的场地实验上,并取得了较好的效果.1 系统简介轮速信号采集系统主要由车轮信号采集、轮速信号调理器和计算机组成,如图1所示.轮速信号的采集主要是指采集车辆现有ABS 系统上的轮速信号,而ABS 通常都是通过在车轮处安装霍尔传感器采集的,只需将其信号引出即可.图1 轮速信号采集系统的组成F i g .1 Four wheels speed si gna l collecti on syste m由于从车轮处采集的信号载有高低频噪声,不能直接使用,因此需要调理轮速信号,调理过程包括跟随器、.跟随器使上下级电路匹配的更好,滤波器可以将信号的高、低噪声分别滤去,而整形放大器将信号放大为计算机可识别的有规则信号形式.计算机通过专用的脉冲计数卡接收轮速脉冲信号后,通过轮速计算模型计算当前4个车轮的真正轮速信号.2 硬件电路的设计2.1 信号采集ABS 已经成为车辆的标准配置.ABS 的工作原理[4]是利用装在车辆刹车系统上的传感器感知刹车时车轮的运动状态,当车辆紧急制动时,车轮的转速在制动系统作用下迅速降低.因此,可以利用现有的ABS [5]系统,从它的轮速采集传感器(霍尔元件)中引出轮速信号.由于车辆在行驶过程中工况比较复杂,车轮处引出的轮速信号是一个载有高、低频噪声,并且信号零点漂移严重的脉冲信号.2.2 轮速信号调理器将采集的轮速信号接入轮速信号调理器,调理器的功能如图2所示,分为跟随器、低通滤波器、高通滤波放大器和整形稳压[6]输出四部分.图2 轮速信号调理F i g .2 W heels speed si gna l cond iti on i n g2.2.1 跟随器 本文设计一种电压跟随电路,特点是输入高阻抗,输出低阻抗,使其在电路中可以起阻抗匹配的作用,能使后一级的放大电路更好工作.2.2.2 信号滤波放大 采用文献[7]的方法进行信号滤波放大.由于试验场地复杂,同时车在运行中的干扰因素很多,所以信号的噪声严重,在有效脉冲上既有低频噪声又载有高频噪声.通过分析和计879 吉林大学学报(理学版) 第47卷 算可得信号的有效频段,采用低通滤波器和高通滤波器相结合的滤波方式可得有效的脉冲信号.低通滤波器采用一阶低通滤波器,高通滤波器采用无限增益多路反馈高通滤波器.实验测得,滤波后保留了所需频率范围的信号,在滤波的同时,将幅值较低的信号放大到所需的幅值范围,但滤波后脉冲信号的波形不理想.2.2.3 信号整形稳压输出 利用电压比较电路实现信号整形稳压输出,将参考电压设在波形较好的区域,这样就可通过比较电路得到波形较好的轮速信号,再通过稳压管将脉冲信号的幅值确定在+5~0V,计算机即可直接接收[8].2.3 计算机信号的采集将轮速信号调理器输出的脉冲信号输入到计算机定时/计数卡的输入端口,定时/计数卡一方面可以对外部输入的脉冲进行计数,另一方面可以为系统提供基准时钟.在设定的单位时间内,计数卡将得到的脉冲数以中断形式发送给轮速计算模型.3 软件设计轮速计算模型的工作原理是用得到的脉冲数除以计数时间,得出瞬时单位时间内计数的脉冲数,再除以车轮转一周的脉冲数,即可知单位时间内车轮的转数,最后根据不同品牌车辆车轮外径的不同值,得出车辆在运动过程中4个轮子实时的转速.轮速计算模型的工作原理如图3所示.图3 轮速计算模型F i g .3 W heels speed ca lcul a ti on m odel该模型为一个循环计算模型,每次由定时卡的定时中断信号触发循环,定时触发信号的间隔是5m s,即每5m s 计算一次4个轮子当前的转速.由图3可见,循环的开始等待接收定时中断信号,一旦接收到中断,则读取脉冲寄存器内脉冲的数目.然后利用如下公式计算车论的转速:Δt 时间内的脉冲数Δt=单位时间内的脉冲数,其中Δt =5m s .已知车轮转一周产生44个脉冲,单位时间内的脉冲数44=单位时间内车轮的转数,单位时间内车轮的转数×π×车轮的直径=车轮的转速. 由于车的品牌不同,所以车轮的直径也不同,因此针对不同类型的车,只需修改参数库中车轮直径的数值,即可适用于各种车型.图4 凯美瑞四轮轮速信号F i g .4 Cam ry ’s four wheels speed si gna l 图5 福克斯四轮轮速信号F i g .5 Focus ’s four wheels speed si gna l4 实验结果在场地实验中,分别在凯美瑞和福克斯这两个车系中应用了该系统,实验效果如图4和图5所示,其中横坐标为时间(m in ),纵坐标为车轮的转数,OM _WHEEL _LF 为左前轮信号,OM _WHEE L _LR 为979 第5期 徐 颖,等:ABS 实时四轮轮速信号采集系统 089 吉林大学学报(理学版) 第47卷 左后轮信号,OM_WHEEL_RF为右前轮信号,OM_WHEE L_RR为右后轮信号.由图4和图5可见, 4个轮子的轮速信号一致性较高.同时通过动力学模型计算验证,使用ABS实时四轮轮速信号采集系统采集到的四轮轮速信号准确、实时.综上可见,轮速信号采集方法及装置简化了轮速信号的采集,缩短了测量装置安装周期,降低了测量成本,并且对车辆的结构没有任何影响.同时,自行研制的轮速信号调理器处理脉冲信号的能力强,通过改变元器件的取值可以适用于各种范围,信号采集的实时性好,只需替代轮速计算模型中少量的参数即可适用于各种车型,应用范围广,可推广应用到各种车辆的对标性能测试[9]中.参考文献[1] BA I Shao2hong.Devel opment of I ntegrated Hall Transducer[J].Pr ocess Aut omati on I nstru mentati on,2003,24(3):129.(白韶红.集成霍尔传感器的发展[J].自动化仪表,2003,24(3):129.)[2] L I J ing,L I You2de,ZHAO J ian,et al.Research on Tracti on Contr ol System for FourW heel D rive Vehicle[J].Journalof J ilin University:Engineering and Technol ogy Editi on,2003,33(4):126.(李 静,李幼德,赵 健,等.四轮驱动汽车牵引力控制系统研究[J].吉林大学学报:工学版,2003,33(4):126.)[3] 麻友良,丁卫东.汽车电器与电子控制系统[M].北京:机械工业出版社,2003.[4] 周云山,于秀敏.汽车电控系统理论与设计[M].北京:北京理工大学出版社,1999.[5] G AO Yang,L I J ing,ZHAO J ian,et al.Full2ti m e Four2wheel2drive Vehicle Tracti on I ntegrated Contr ol Strategy[J].Journal of J ilin University:Engineering and Technol ogy Editi on,2009,39(2):2962299.(高 阳,李 静,赵 健,等.全时四轮驱动汽车驱动轮牵引力综合控制策略[J].吉林大学学报:工学版,2009,39(2):2962299.)[6] 童诗白,华成英.模拟电子技术基础[M].3版.北京:高等教育出版社,2004.[7] L I U Guo2fu,WANG Yue2ke,ZHANG Q i,et al.Study on the Filter Technique in ABS W heel Speed Signals[J].Aut omobile Technol ogy,2004(3):22224.(刘国福,王跃科,张 ⊥,等.ABS轮速信号的滤波技术研究[J].汽车技术,2004(3):22224.)[8] Z HANG J i2le,LU Zhi2xi ong.The W heel S peed Sens or of ABS and Its Signal Pr ocessing[J].Machinery&Electr onics,2007(12):48250.(张集乐,鲁植雄.ABS轮速传感器及其信号处理[J].机械与电子,2007(12):48250.) [9] 徐 颖,高 越,詹 军.轮速信号采集系统:中国,200810050234[P].2008206211.。
汽车测速原理汽车测速原理,就是通过一定的传感器和数据采集系统,对汽车的速度进行准确的测量,从而保证驾车安全和道路通畅。
传统的汽车测速方法是通过测量车轮旋转的圈数来计算车速,但是这种方法非常容易出现误差,而且只能作为一种大致估计的方法。
现代汽车测速系统采用了更加精确的测速计算原理,下面来进行详细介绍。
1. 车速传感器车速传感器是汽车测速系统中最重要的一个组成部分,它能够实时感知车轮的速度,并将这些信息传输给控制模块进行处理。
常用的车速传感器有两种,一种是利用车轮旋转时产生的电磁信号进行测速,另一种是通过轮轴和车轮之间的机械连接来实现测速。
2. 数据采集系统数据采集系统是汽车测速系统的核心部分,它能够收集和处理车速传感器发出的数据,并进行计算和分析,最终输出准确的车速值。
数据采集系统通常由控制模块、计算机、传输线路等组成,其中控制模块的主要功能是将车速传感器发出的信号转化成数字信号,然后传输给计算机进行处理。
3. GPS定位系统GPS定位系统是一种与车速传感器相辅相成的测速技术,它能够通过卫星定位方式来计算车速。
GPS定位系统的优点是精度高、误差小,不受天气、路况等因素的影响。
但是它的缺点也很明显,就是需要在开车时打开定位功能,而且获取卫星信号的时间和精度也存在一定的局限性。
因此,在实际应用中,GPS定位系统往往作为备用测速方式,进行与车速传感器的双重测量,以保证测速的准确性。
4. 操作系统与显示屏操作系统和显示屏是汽车测速系统中的可视化部分,它们能够将测速数据以数字、图形、报表等形式呈现给驾驶员,方便他们及时掌握车速情况。
现代汽车测速系统一般采用液晶显示屏和触摸按键,用户可以通过触摸屏幕调整测速系统的设置和参数,以获得更加个性化的驾驶体验。
综上所述,汽车测速系统是现代汽车智能化的重要组成部分,它能够实现快速、准确、可靠的测速,对于保证道路安全和交通通畅具有重要作用。
随着科技不断进步,汽车测速系统也将不断更新迭代,为驾驶员提供更加智能化、便捷化的应用体验。
车速传感器名词解释
车速传感器是一种用于检测车辆行驶速度的传感器,它具有实时
测量车辆的精准速度的功能。
一般情况下,车速传感器允许汽车内部
系统获取实时车速信息以及控制车辆行驶过程中执行特定任务。
车速传感器采用电子传感器或光学传感器来检测车辆的行驶速度。
车速传感器主要包括发射端和接收端。
当发射端发出微小的光束或者
电磁信号时,接收端将接收发射端发出的信号,并通过处理这些信号
来得出行驶速度大小的结果。
车速传感器的长处在于它拥有超高的精度,可以提供非常精确的
车速数据。
车速传感器还能够提供车辆行驶过程中的补充信息,例如
碰撞信号和刹车信号,以便车辆系统更好地进行控制。
此外,车速传感器也具有低成本、快速响应、易于安装、可靠性
等诸多优点。
它可以为车辆的安全性、效率和经济性提供更有效的保障。
目前,车速传感器已经广泛用于汽车、机动车、卡车、汽车和其
他车辆型号的安全控制和驾驶辅助系统。
监控车速应用的什么原理监控车速的应用主要依靠车辆速度传感器和相关的数据处理系统。
这些应用可以使用不同的技术和原理来实现,下面将介绍几种常见的监控车速应用的原理。
1.GPS定位系统:GPS(全球定位系统)是一种通过卫星定位来测量车辆位置和速度的技术。
GPS接收器可以接收来自卫星的信号,并从中计算车辆位置和速度。
通过与预先设定的地图数据进行比较,可以确定车辆是否超速。
这种应用通常被称为“GPS车速监控系统”。
它可以通过车辆上安装的GPS接收器获取车速数据,并将其传输到相关的数据处理系统进行分析和记录。
2.视频图像处理:视频图像处理是另一种监控车速的常见应用原理。
这种方法使用车辆周围安装的摄像头来捕捉车辆行驶的视频,并通过图像处理算法来识别车辆的位置和速度。
例如,通过跟踪车辆的位置变化和临近物体的运动情况,可以计算车辆的速度。
这种应用通常用于交通监控和交通违章检测系统。
3.轮速传感器:车辆的轮速传感器是一种常见的监控车速的装置。
它通常安装在车轮上并与车辆的计算机系统相连。
传感器通过测量车轮转动的速度来计算车辆的速度。
这种方法可以通过车辆本身的传感器来获取数据,而无需额外的安装或传输设备。
这种应用常用于车辆的动态稳定控制和防抱死刹车系统等。
4. Doppler效应原理:Doppler效应是一种基于声波或雷达波传播过程中物体速度变化而产生的频率变化的原理。
在监控车速应用中,可以使用雷达系统来测量车辆速度。
雷达发射器发射出高频的电磁波,当波经过车辆时,车辆的运动会导致波的频率发生变化。
通过测量反射回来的波的频率变化,可以计算车辆的速度。
这种应用常用于交通雷达测速仪和自动门控制系统等。
这些都是常见的监控车速应用的原理。
不同的应用会选择不同的原理和技术来实现车速监控,以满足不同的需求和要求。
随着技术的不断进步,未来还可能出现更多基于新原理和技术的车速监控应用。
车速传感器原理
车速传感器是一种用来测量车辆行驶速度的装置。
它可以通过检测车轮转动的频率来计算车辆的速度,并将测量结果传输给车辆的控制系统。
车速传感器的原理基于霍尔效应,即当导体通过一个磁场时,会产生一个电压差。
车速传感器通常由一个磁性编码盘和一个霍尔传感器组成。
磁性编码盘固定在车轮或传动轴上,而霍尔传感器则安装在车辆底盘上。
当车轮转动时,磁性编码盘上的磁性标记通过霍尔传感器产生变化的磁场。
这个变化的磁场会产生相应的电压差,霍尔传感器会将这个电压差转换为数字信号。
车速传感器会测量磁性编码盘上的磁标记通过的频率,并根据这个频率计算车辆的行驶速度。
这个速度值会发送给车辆的控制系统,以便实现一些行车功能,如自动变速器的换档控制、防抱死制动系统等。
车速传感器的工作原理可以总结如下:当车轮旋转时,磁性编码盘上的磁标记通过霍尔传感器产生变化的磁场,霍尔传感器将这个磁场转换为电压差。
然后,车速传感器测量这个电压差的频率,并根据频率计算车辆的行驶速度。
最后,车速传感器将速度值发送给车辆的控制系统,以实现各种行车功能。
总之,车速传感器是一种基于霍尔效应的装置,通过测量车轮转动的频率来计算车辆的速度,并将测量结果传输给车辆的控制系统。
园区车辆测速系统解决方案园区车辆测速系统解决方案文档控制目录第1章系统方案概述1.1 应用背景随着园区内车辆数量的增加,安全问题日益凸显。
园区管理方需要一种能够监控车辆速度并及时预警的系统,以保障园区内交通安全。
1.2 业务现状目前,园区内的车辆测速主要依靠人工测速,存在测量不准确、工作量大、效率低等问题。
同时,无法及时发现超速行驶的车辆,存在安全隐患。
1.3 需求分析1.3.1 业务需求园区车辆测速系统需要具备以下功能:1)实时监测车辆速度;2)自动识别车牌号码;3)记录车辆违规信息;4)及时预警超速行驶车辆。
第2章系统设计2.1 系统框架园区车辆测速系统分为前端监测设备、中间处理服务器和后端数据管理系统三个部分。
前端监测设备包括摄像头和测速仪器,用于实时监测车辆速度和识别车牌号码。
中间处理服务器用于处理前端传输的数据,记录车辆违规信息。
后端数据管理系统用于存储和管理数据,并进行超速行驶车辆的预警。
2.2 系统流程系统流程包括车辆监测、数据处理和信息管理三个环节。
当车辆通过监测设备时,设备会自动识别车牌号码并记录车辆速度。
数据会传输到中间处理服务器进行处理,判断车辆是否违规行驶。
如果车辆超速行驶,系统会自动进行预警并记录车辆信息。
第3章系统实现3.1 前端监测设备前端监测设备主要包括摄像头和测速仪器。
摄像头用于拍摄车辆照片和识别车牌号码,测速仪器用于测量车辆速度。
设备需要具备高清晰度、高识别率、高测量精度等特点。
3.2 中间处理服务器中间处理服务器需要具备高性能、高稳定性、高可靠性等特点。
服务器需要能够实时处理大量数据,并能够进行数据备份和恢复。
3.3 后端数据管理系统后端数据管理系统需要具备高可扩展性、高安全性、高性能等特点。
系统需要能够存储大量数据,并能够进行数据备份和恢复。
同时,系统需要具备权限管理、数据分析等功能。
结论园区车辆测速系统能够有效解决园区内车辆超速行驶问题,提高交通安全水平。
基于单片机的自行车车速报警系统自行车作为一种环保、便捷的交通工具,深受人们的喜爱。
然而,在高速行驶的过程中,车速过快可能导致意外事故的发生。
为了保障骑行者的安全,我们开发了一种基于单片机的自行车车速报警系统。
一、系统介绍自行车车速报警系统是一种通过测量自行车速度并实时监测车速的设备。
当车速超过设定的安全速度阈值时,系统将会触发警示信号,提醒骑行者减速。
该系统由传感器、单片机、报警器和电源等组成。
二、硬件设计1. 传感器:为了测量自行车的速度,我们选择了一种具有高精度和快速响应的磁性传感器。
传感器可以通过检测自行车旋转的磁铁,计算出车辆的速度。
2. 单片机:我们选用了一款高性能的单片机,用于控制整个系统的运行。
它可以接收传感器的数据,并根据设定的阈值进行速度判断。
当车速超过阈值时,单片机将触发报警器。
3. 报警器:为了提醒骑行者减速,我们选择了一种声音响亮、音调高且易于安装的地址报警器。
当报警器触发时,骑行者将能够清楚地听到报警声音,并能够及时采取措施。
4. 电源:为了保证系统的长时间运行,我们采用了可充电的电池作为电源。
电池具有较长的续航时间,并且可以通过充电器进行充电。
另外,系统还配备了电池电量显示器,方便骑行者了解电池的使用情况。
三、软件设计1. 传感器数据采集:单片机通过输入引脚连接到传感器,实时采集传感器输出的数据。
传感器输出的数据可以表示自行车的转速。
通过计算转速与轮胎直径的关系,可以得到车辆的速度。
2. 车速判断:单片机将传感器采集到的数据与事先设定的安全速度阈值进行比较。
如果车速超过阈值,单片机将触发报警器,发出警示信号。
3. 报警处理:报警器通过与单片机的输出引脚连接,接收触发信号后,会发出高音量的警报声音,提醒骑行者减速。
同时,系统还会在液晶显示屏上显示当前的车速和电池电量,方便骑行者了解自己的状态。
四、系统优势1. 提高安全性:该系统可实时监测车速并及时发出警示,能够有效提醒骑行者减速,降低事故发生的风险。