电子论文-DVD循轨重复控制器的设计及参数优化
- 格式:pdf
- 大小:430.59 KB
- 文档页数:5

第1章绪论1.1动态电子轨道衡技术动态电子轨道衡是一种对运行中的列车进行自动称重的计量设备。
其技术原理是称重台面将列车重量传递至传感器,传感器将重量转换为电压信号,在经过A/D系统将电压信号转换为数字信号,由计算机处理得到每节车重量、速度,从而实现对货物列车的自动称重,该设备主要应用于铁路运输部门,矿山、油田、港口等大型企业专用线,整套系统要求测量精度高,耐恶劣工作环境。
目前,动态轨道衡称重系统由最初庞大的整体道床、复杂的称重台面机械结构演变成无基抗、无道床,简化台面的结构,而单元式称重传感器则简化为传感元件与铁轨一体化的称重轨传感器。
整个系统大大节省了现场施工、安装时间,使得称重系统逐步向整体化、轻型化和结构简单化的方向发展。
在测量精度方面,从六、七十年代准确度劣于1%的情况,发展到今天的精确度优于0.2级(0.5%);从仪表PZ-8型和由分立器件组成的控制电路发展到如今采用微型计算机和工控机构成的新型硬件系统:从恒温式、低精度传感器发展到性能稳定、高速度高精度高可靠性的新型传感器等等。
整个发展过程历经动态机械轨道衡、机电结合动态轨道衡、动态电子轨道衡一直到如今最新型的动态轨道衡,例如无称台轨道衡、不断轨(钢轨式)轨道衡等。
但是这些新型轨道衡的造价高,经营成本高,普及率还比较低。
相对来说,动态电子轨道衡的应用率比较高。
它运用高速模数转换装置,高性能的传感器,使用功能强大、构思完善和算法精确的软件系统,使整个动态称量的精度能够很好的满足实际称量要求。
1.2 动态电子轨道衡在我国的应用与发展随着改革的深入和国民经济的飞速发展,各企业贸易结算和计量工作水平不断提高,轨道衡在大宗散装物料计量工作中所起的作用越来越大。
尤其是要求快速计量的场合,动态电子轨道衡的种种优点及其所产生的经济效益受到越来越多的企业关注,动态电子轨道衡的发展也变得异常迅速。
我国从80年代开始建设轨道衡计量标准器并建立了量值传递系统,再次基础上引进技术,自己研制、生产电子轨道衡,曾先后引进大量传感器和智能仪表,示范和改造原有的机械轨道衡,经济效益和社会效益非常显著。

一种改进型重复控制器的研究作者:杨照辉,张菁,梁宝娟来源:《现代电子技术》2009年第12期摘要:提出一种新的改进型重复控制策略,克服了传统重复控制器内模使用过多数据存储空间的缺点。
详细分析新型控制器的模型,给出控制器优化设计方法。
在设计中加入电流内环,通过电感电流反馈来降低输出滤波器的谐振峰值,增加系统的稳定性,简化了重复控制器的设计。
与传统直接重复控制器相比,去除了North滤波器,弥补了North滤波器谷点设计不精确的缺点。
关键词:重复控制;电流环;参数设计;内模原理;滤波器中图分类号:TP274文献标识码:A文章编号:1004-373X(2009)12-183-02Research of Improved Repeated ControllerYANG Zhaohui,ZHANG Jing,LIANG Baojuan(School of Electronic and Control Engineering,Chang′an University,Xi′an,710064,China)Abstract:A kind of novel improvement type repeated control strategy is put forward,weakness of the traditional repeated controller mold inside uses an excessive data saving space is overcomed.The model of new controller is analysed i n detail,controller′s optimal design method is given.Joining wreath inside of current in the design,using the current feedback of henrymeter to lower resonance voltage maximum value of output filter,the stability of system is increased,the design of repeated controller is paring with direct traditional repeated controller,it removes North filter,makes up the difference of North filter valley point is inaccuracy.Keywords:repeated control;current wreath;parameter design;inside mold principle;filter随着信息产业的高速发展,UPS作为一种恒频、恒压、纯净、高质量的电源,已经成为许多重要用电场合必备的辅助电源。
毕业论文(设计)dvd在线租赁决策优化模型摘要:本文建立了关于DVD在线租赁业务一系列问题的数学模型。
第一,建立概率模型,并得到DVD的最少需求数量。
接下来给出了目标规划模型建立最优分配方案,在模型的求解过程中,先后给出了三种近似算法:模拟退火算法、贪欲算法和改进贪欲算法。
再建立一调度模型使得DVD 数量最少,分配方案最优。
本论文所建模型理论基础较完善,算法简洁快速,可操作性强,在运算机上对给定数据能够实时得到结果,因此有较强的有用性;同时只需通过简单的修改便可解决类似问题,易于推广。
关键词:DVD在线租赁;正态分布;线性规划;贪欲算法;模拟退火算法; 改进贪欲算法The policy-making optimization model about DVD on-line rents Abstract: This article established on-line has rented service a series of questions about DVD the mathematical model. First, establishes the probabilistic model, and obtains DVD the least demands quantity. Met down has produced the target programming model establishment most superior assignment plan, in the model solution process, has produced three approximate methods successively: Simulation annealing algorithm, greedy algorithm and improvement greedy algorithm. Again establishes a dispatch model to cause the DVD quantity few, the assignment plan is most superior. The present paper modeling rationale consummates, the algorithm succinct is fast, feasibility, to assigns the data on the computer to be possible real-time to obtain the result, therefore has the strong usability; And only must pass through the simple revision then to be possible to solve the similar problem, is easy to promote.Key words: DVD on-line rents; Normal distribution; Linear programming; Greedy algorithm; Simulation annealing algorithm; Improves the greedy algorithm一、绪论随着信息时代的到来,网络成为人们生活中越来越不可或缺的元素之一。
DVD循轨重复控制器的设计及参数优化
马菲;王晓健;蔡秋花
【期刊名称】《微计算机信息》
【年(卷),期】2008(024)022
【摘要】在DVD循轨伺服控制系统中,碟片的偏心会对循轨误差信号TE(tracking errors)产生周期性的扰动.随着光盘转速的大大提高,该周期扰动会降低激光光头循轨的性能.为了有效的抑制该干扰,DVD循轨伺服控制系统引入了重复控制器.本文在稳定性条件的基础上设计重复控制器并提出参数优化的办法,通过仿真验证重复控制器能显著有效地抑制频率已知周期干扰信号.
【总页数】3页(P13-15)
【作者】马菲;王晓健;蔡秋花
【作者单位】200240,上海交通大学自动化系;261031,潍坊职业学院机电工程系;200240,上海交通大学自动化系
【正文语种】中文
【中图分类】TP13
【相关文献】
1.基于LDC1314的自动循轨机器人实验系统设计 [J], 郝玲;王艳春;庞健;马驰
2.DVD光驱聚焦伺服系统中的重复控制器 [J], 薛美盛;霍敏端;吴刚;石春
3.DVD循轨伺服控制系统设计及参数优化 [J], 王晓健
4.DVD跨轨伺服控制的优化设计 [J], 张大波;张善锋
5.DVD聚焦系统鲁棒重复控制器设计 [J], 石春;吴刚;王嵩;周全
因版权原因,仅展示原文概要,查看原文内容请购买。
基金项目:国家自然科学基金(60474031)DVD 循轨重复控制器的设计及参数优化马菲1 ,王晓健2,蔡秋花1(1.上海交通大学 自动化系,上海 200240 2. 潍坊职业学院 机电工程系 潍坊261031) 摘 要:在DVD 循轨伺服控制系统中,碟片的偏心会对循轨误差信号TE(tracking errors)产生周期性的扰动。
随着光盘转速的大大提高,该周期扰动会降低激光光头循轨的性能。
为了有效的抑制该干扰,DVD 循轨伺服控制系统引入了重复控制器。
本文在稳定性条件的基础上设计重复控制器并提出参数优化的办法,通过仿真验证重复控制器能显著有效地抑制频率已知周期干扰信号。
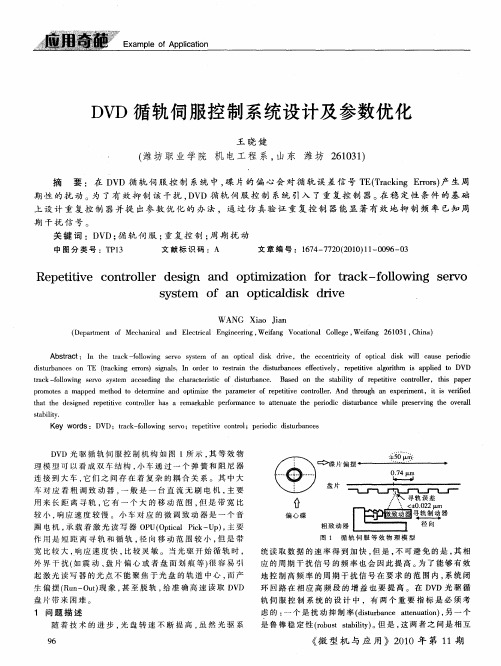
关 键 词:DVD,循轨伺服,重复控制,周期扰动 中图分类号:TP13 文献标识码:ARepetitive controller design and Optimization for track-following servo system of an opticaldisk driveMA Fei, WANG Xiao-jian, CAI Qiu-hua.(Dept. of Automation, Shanghai Jiao Tong University, Shanghai 200240, China) Abstract : In the track-following servo system of an optical disk drive, the eccentricity of optical disk will cause periodic disturbances on TE(tracking errors) signals. With the increase of rotating speed, however, the effect of periodic disturbances consequently degrades the performance of track-following. In order to restrain the disturbances effectively, repetitive algorithm is applied to DVD track-following servo system according the characteristic of disturbance . Based on the stability of repetitive controller, this paper promotes a mapped method to determine and optimize the parameter of repetitive controller. And through an experiment, it is verified that the designed repetitive controller has a remarkable performance to attenuate the periodic disturbance while preserving the overall stability. Key words: DVD; track-following servo; repetitive control; periodic disturbances 1.引言DVD 光驱循轨伺服控制机构如图1所示,其等效物理模型可以看成的双车结构,小车通过一弹簧和阻尼器连接到大车,他们之间存在着复杂的耦合关系。
其中大车对应着粗调致动器,一般是一直流无刷电机,主要用来长距离寻轨,它有一个大的移动范围,但是带宽比较小,响应速度较慢。
小车对应着微调致动器,是一音圈电机,承载着激光读写器OPU (optical pick-up),主要作用是短距离寻轨和循轨,径向移动范围较小,但是带宽比较大,响应速度快,比较灵敏。
当光驱开始循轨时,由于外界干扰,比如震动、盘片偏心或者盘面划痕等很容易引起激光读写器的光点不能聚焦于光盘的轨道中心,而产生偏摆(Run-Out)现象,甚至脱轨,给准确高速读取DVD 盘片带来困难。
图1 循轨伺服等效物理模型0.74μm盘片碟片偏摆偏心碟2.问题描述随着技术的进步,光盘转速不断的提高,虽然光驱系统读取数据的速率得到加快,但是,不可避免的,相应的周期干扰信号的频率也会因此提高。
为了能够有效的抑制高频率的周期干扰信号到要求的范围内,系统闭环回路在相应高频段的增益也要提高。
在DVD 光驱循轨伺服控制系统的设计中,有两个重要指标是必须考虑的,一个是扰动抑制率(disturbance attenuation),另一个是鲁棒稳定性(robust stability)。
但是,这两者之间是相互矛盾的,需要寻找到两者的平衡。
例如,高的闭环回路增益可以有利于扰动的抑制,但是会降低系统的稳定裕度。
正因为这个原因,控制器的设计需要大量的实验,并且设计出的控制器因为阶次比较高,很难在应用于实际系统中。
因此,在光驱高速读取盘片的时候,单一的一个滞后超前控制器很难满足系统要求。
为了增强系统抑制周期扰动信号的能力,系统在原来的基础上加入了重复控制器,如图2所示。
其中r 是系统输入,y 是系统的输出,d 是run-out 干扰,TE(tracking errors)是系统循轨误差,控制器C(s)为一滞后超前控制器,对象P(s)是系统双车结构的辨识模型,Cr(s)是S. Hara[3]在牺牲系统高频增益的前提下,提出了一种改进的重复控制器。
此时,系统的开环传递函数**G Cr C P =。
图2 含重复控制器的循轨伺服系统框图3.重复控制器的设计及参数优化 3.1 重复控制器定义和稳定条件重复控制器结构如图2中的Cr 所示。
其中,F(s)为一低通滤波器,一般取()1/(1)F s s τ=+,Tse−为一延迟环节,代表把信号延迟T 个时间单位,T 为外界干扰信号的周期。
S. Hara[3]分析并提出了这种重复控制系统稳定条件:定理:假设P(s)和C(s)没有不稳定的零极点对消,因而G(s)没有隐含的不稳定极点,并且其输入、输出稳定性与最小实现的内部稳定性是一致的。
这时,若 (Ⅰ) 1[1()]()G s G s −+⋅是稳定的有理函数代数式; (1) (Ⅱ) 对于1()[1()]F Q F s G s −=⋅+,有||||1F Q ∞<; (2)成立,则图2所示的含重复控制器的循轨伺服系统是指数渐近稳定的。
可见含有重复控制器的系统稳定性条件就是满足定理中的式1与式2。
3.2 重复控制器的设计首先,根据循轨伺服规格ECMA-267[2]设计一串联滞后控制器1()lead lag C s C C =⋅和比例控制器K: 121211()11lead lag T s aT s C s K C C K aT s T s ++=⋅⋅=⋅⋅++ (3) 可以得到系统的开环传递函数:()()();G s C s P s =⋅此时,校正后|1()|G j ω+的伯德图符合循轨伺服规格ECMA-267,并且满足定理中的式1,如图3中的实线所示。
接着,设计重复控制器.1()1()r TsC s F s e−=−,实际上就是设计重复控制器中的两个参数T 和τ。
如果光驱主轴马达旋转的角速度为0ω,则因碟片偏心产生的周期干扰信号的周期为02/πω,重复控制器中的参数T一般选取干扰信号的周期,即02/T πω=。
τ是利用重复控制器的稳定性条件式2确定,式2可等价于:|1()||()|,G j F j ωωω+>∀ (4)其中, ()1,t F j ωω≈∀∈Ω (5) 由此,在伯德图上分析式4和式5的约束条件,我们可以得出系统稳定的条件为|()|F j ω位于|1()|G j ω+下方。
因此,只需设计在|1()|G j ω+和|()|F j ω=不相交的范围内使τ选择得尽量小即可。
如图3所示,通过伯特图得到τ的范围为0{|}ττττΩ=≥,即系统跟踪范围0{|1/}ωωωτΩ=≤。
图4显示重复控制器在指定频率处提升系统增益。
图3 设计中的F(s)决定方案 图4 含有重复控制器的系统波特图3.3 重复控制器参数优化按照上述步骤设计出的重复控制器,一般0ττ=,02/T πω=。
但是经过多次试验发现,0ττ=,02/T πω=并不是系统最优的参数,即系统的稳定裕量还不是最大值。
其中,参数T 和τ是在一定范围内变化的:0{|}ττττΩ=≥,022{|0.8 1.2}T T T ππωωΩ=⋅≥≥⋅。
不失一般性,令11101110()m m m n n n s b s b s b G s s a s a s a −−−−++⋅⋅⋅++=++⋅⋅⋅++,令0s j ω=代入上式得:012()G j K j K ω=+⋅ (6)其中,1K 、2K 是与0ω有关的常数。
又欧拉方程cos()sin()TsT j ee T j T ωωω−−==−+− ,()1/(1)F s s τ=+代入式.1()1()r TsC s F s e −=−得: 000001()1cos (sin )j Cr j T j T τωωωτωω+⋅=−++ (7) 此时,系统闭环转递函数的幅值特性为00(,)|1()()|f T Cr j G j τωω=+⋅ (8)易知,将式6和式7代入式8,得到以T 和τ为自变量的二元非线性函数(,)f T τ,此时,问题转化成含约束条件的优化问题:max (,)f T τ (9) ..s t 0{|}τττττ∈Ω=≥ ,022{|0.8 1.2}T T T T ππωω∈Ω=⋅≥≥⋅由于该问题是带约束条件的二元非线性函数优化问题,不能给出T 和τ的解析解,一图5系统250Hz 处波特图 图6 输出误差对比4 仿真与结论由于碟片偏心而引起的系统干扰相当于一频率与转速成正比的正弦信号,现选取一幅值5个单位,频率为250Hz 的正弦波作为干扰源。
从某一技术手册中得到某一DVD 循轨伺服模型4323.6212()10040 6.2310 6.7712 5.715e P s s s e s e s e =++++,作者根据ECMA-267标准设计了一滞后超前控制器(2660)(0.3216)()(85520)(0.01)s s C s s s ++=++和比例控制器220000000K =。
设计重复控制器12501()111/60001s Cr s es −=−+ ,经参数优化后'1262.8031()111/56001s Cr s es −=−+ 。