基于ADAMS的双叉臂悬架系统动力学研究
- 格式:doc
- 大小:172.00 KB
- 文档页数:8
基于ADAMS的悬架系统动力学仿真分析与优化设计一、概述本文以悬架系统为研究对象,运用多体动力学理论和软件,从新车型开发中悬架系统优化选型的角度,对悬架系统进行了运动学动力学仿真,旨在研究悬架系统对整车操纵稳定性和平顺性的影响。
文章提出了建立悬架快速开发系统平台的构想,并以新车型开发中的悬架系统优化选型作为实例进行阐述。
简要介绍了汽车悬架系统的基本组成和设计要求。
概述了多体动力学理论,并介绍了利用ADAMS软件进行运动学、静力学、动力学分析的理论基础。
基于ADAMSCar模块,分别建立了麦弗逊式和双横臂式两种前悬架子系统,多连杆式和拖曳式两种后悬架子系统,以及建立整车模型所需要的转向系、轮胎、横向稳定杆等子系统,根据仿真要求装配不同方案的整车仿真模型。
通过仿真分析,研究了悬架系统在左右车轮上下跳动时的车轮定位参数和制动点头量、加速抬头量的变化规律,以及汽车侧倾运动时悬架刚度、侧倾刚度、侧倾中心高度等侧倾参数的变化规律,从而对前后悬架系统进行初步评估。
1. 悬架系统的重要性及其在车辆动力学中的作用悬架系统是车辆的重要组成部分,对车辆的整体性能有着至关重要的作用。
它负责连接车轮与车身,不仅支撑着车身的重量,还承受着来自路面的各种冲击和振动。
悬架系统的主要功能包括:提供稳定的乘坐舒适性,保持车轮与路面的良好接触,以确保轮胎的附着力,以及控制车辆的姿态和行驶稳定性。
在车辆动力学中,悬架系统扮演着调节和缓冲的角色。
当车辆行驶在不平坦的路面上时,悬架系统通过其内部的弹性元件和阻尼元件,吸收并减少来自路面的冲击和振动,从而保持车身的平稳,提高乘坐的舒适性。
同时,悬架系统还能够根据车辆的行驶状态和路面的变化,自动调节车轮与车身的相对位置,确保车轮始终与路面保持最佳的接触状态,以提供足够的附着力。
悬架系统还对车辆的操控性和稳定性有着直接的影响。
通过合理的悬架设计,可以有效地改善车辆的操控性能,使驾驶员能够更加准确地感受到车辆的行驶状态,从而做出更为精确的操控动作。
基于ADAMS的悬架系统动力学仿真分析与优化设计摘要:本文基于ADAMS软件,对悬架系统进行了动力学仿真分析与优化设计。
通过建立悬架系统的模型,应用动力学仿真技术,研究了悬架系统在不同工况下的动力学性能,并进行了相应的优化设计。
仿真结果表明,通过优化设计,悬架系统的动力学性能得到了明显的提升,进而提高了整车的操纵稳定性和行驶舒适性。
1. 引言随着汽车工业的发展,悬架系统的性能对于整车的操纵稳定性和行驶舒适性起着至关重要的作用。
因此,对悬架系统进行动力学仿真分析和优化设计具有重要的理论意义和工程应用价值。
2. 悬架系统模型建立首先,根据悬架系统的实际结构和工作原理,建立了悬架系统的运动学和动力学模型。
模型包括弹簧、减振器、转向杆等各个部件,并考虑了车轮与地面之间的接触力和摩擦力。
通过ADAMS软件的建模工具和功能,对悬架系统进行了准确地建模。
3. 悬架系统动力学仿真基于悬架系统的模型,进行了不同工况下的动力学仿真分析。
通过设定不同的工况参数,如路面不平度、悬架系统参数等,研究了悬架系统在不同路况下的动力学性能。
仿真结果显示了悬架系统的悬架行程、车体加速度、横向加速度、滚动转矩等关键参数的变化规律。
4. 悬架系统优化设计根据悬架系统动力学仿真的结果,对悬架系统进行了优化设计。
通过改变悬架系统的参数和结构,优化了悬架系统的动力学性能。
具体而言,通过增加弹簧刚度、调整减振器阻尼等方式改善了悬架系统的行程和刚度特性。
通过优化悬架系统的参数,达到了提高整车操纵稳定性和行驶舒适性的目的。
5. 结果与分析通过悬架系统动力学仿真和优化设计,得到了悬架系统在不同工况下的性能变化趋势。
仿真结果表明,通过合理的优化设计,悬架系统的行程和刚度均得到了明显的改善。
同时,整车的操纵稳定性和行驶舒适性也得到了显著提升。
6. 结论本文基于ADAMS软件,对悬架系统进行了动力学仿真分析与优化设计。
通过建立悬架系统的模型,进行了不同工况下的仿真分析,并进行了相应的优化设计。
基于ADAMS双横臂独立悬架的运动学仿真分析
刘虹;王其东
【期刊名称】《合肥工业大学学报(自然科学版)》
【年(卷),期】2007(030)001
【摘要】悬架的运动学特性首先反映在车轮定位参数的变化趋势上.文章采用虚拟样机技术,在ADAMS软件环境下,建立了某商务车的双横臂扭杆独立悬架的多体动力学模型,并进行了运动学仿真分析,获得了随车轮上下跳动该悬架车轮定位参数的变化规律,为汽车悬架系统开发提供一种有效的现代化手段.
【总页数】3页(P57-59)
【作者】刘虹;王其东
【作者单位】合肥工业大学,机械与汽车工程学院,安徽,合肥,230009;合肥工业大学,机械与汽车工程学院,安徽,合肥,230009
【正文语种】中文
【中图分类】U463
【相关文献】
1.基于ADAMS/View的双横臂独立悬架的运动学仿真分析 [J], 王南;郝莉红;张莉婷;张俊
2.基于ADAMS的双横臂独立悬架仿真分析及优化设计 [J], 周磊磊;徐梦茹
3.基于ADAMS双横臂独立悬架的运动学建模与仿真 [J], 刘虹;王其东;汤传玲
4.基于ADAMS的双横臂独立悬架仿真分析及优化设计 [J], 詹隽青;赵子涵;孟祥德;王雷
5.基于ADAMS的双横臂独立悬架的仿真分析及优化设计 [J], 张亮亮;裴永生;吴丹丹
因版权原因,仅展示原文概要,查看原文内容请购买。
毕业设计(论文)题目:基于ADAMS/Car的汽车悬架系统动力学建模与仿真分析毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日指导教师评价:一、撰写(设计)过程1、学生在论文(设计)过程中的治学态度、工作精神□优□良□中□及格□不及格2、学生掌握专业知识、技能的扎实程度□优□良□中□及格□不及格3、学生综合运用所学知识和专业技能分析和解决问题的能力□优□良□中□及格□不及格4、研究方法的科学性;技术线路的可行性;设计方案的合理性□优□良□中□及格□不及格5、完成毕业论文(设计)期间的出勤情况□优□良□中□及格□不及格二、论文(设计)质量1、论文(设计)的整体结构是否符合撰写规范?□优□良□中□及格□不及格2、是否完成指定的论文(设计)任务(包括装订及附件)?□优□良□中□及格□不及格三、论文(设计)水平1、论文(设计)的理论意义或对解决实际问题的指导意义□优□良□中□及格□不及格2、论文的观念是否有新意?设计是否有创意?□优□良□中□及格□不及格3、论文(设计说明书)所体现的整体水平□优□良□中□及格□不及格建议成绩:□优□良□中□及格□不及格(在所选等级前的□内画“√”)指导教师:(签名)单位:(盖章)年月日评阅教师评价:一、论文(设计)质量1、论文(设计)的整体结构是否符合撰写规范?□优□良□中□及格□不及格2、是否完成指定的论文(设计)任务(包括装订及附件)?□优□良□中□及格□不及格二、论文(设计)水平1、论文(设计)的理论意义或对解决实际问题的指导意义□优□良□中□及格□不及格2、论文的观念是否有新意?设计是否有创意?□优□良□中□及格□不及格3、论文(设计说明书)所体现的整体水平□优□良□中□及格□不及格建议成绩:□优□良□中□及格□不及格(在所选等级前的□内画“√”)评阅教师:(签名)单位:(盖章)年月日教研室(或答辩小组)及教学系意见教研室(或答辩小组)评价:一、答辩过程1、毕业论文(设计)的基本要点和见解的叙述情况□优□良□中□及格□不及格2、对答辩问题的反应、理解、表达情况□优□良□中□及格□不及格3、学生答辩过程中的精神状态□优□良□中□及格□不及格二、论文(设计)质量1、论文(设计)的整体结构是否符合撰写规范?□优□良□中□及格□不及格2、是否完成指定的论文(设计)任务(包括装订及附件)?□优□良□中□及格□不及格三、论文(设计)水平1、论文(设计)的理论意义或对解决实际问题的指导意义□优□良□中□及格□不及格2、论文的观念是否有新意?设计是否有创意?□优□良□中□及格□不及格3、论文(设计说明书)所体现的整体水平□优□良□中□及格□不及格评定成绩:□优□良□中□及格□不及格(在所选等级前的□内画“√”)教研室主任(或答辩小组组长):(签名)年月日教学系意见:系主任:(签名)年月日********大学毕业设计(论文)任务书姓名:院(系):专业:班号:任务起至日期:毕业设计(论文)题目:基于ADAMS/Car汽车悬架系统动力学建模与仿真分析立题的目的和意义:汽车悬架是车架(或车身)与车轴(或车轮)之间的弹性联结装置的统称。
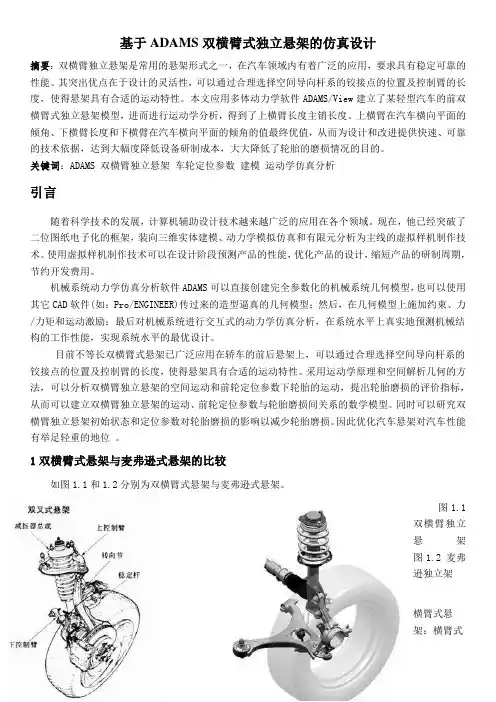
基于ADAMS双横臂式独立悬架的仿真设计摘要:双横臂独立悬架是常用的悬架形式之一,在汽车领域内有着广泛的应用,要求具有稳定可靠的性能。
其突出优点在于设计的灵活性,可以通过合理选择空间导向杆系的铰接点的位置及控制臂的长度,使得悬架具有合适的运动特性。
本文应用多体动力学软件ADAMS/View建立了某轻型汽车的前双横臂式独立悬架模型,进而进行运动学分析,得到了上横臂长度主销长度、上横臂在汽车横向平面的倾角、下横臂长度和下横臂在汽车横向平面的倾角的值最终优值,从而为设计和改进提供快速、可靠的技术依据,达到大幅度降低设备研制成本,大大降低了轮胎的磨损情况的目的。
关键词:ADAMS 双横臂独立悬架车轮定位参数建模运动学仿真分析引言随着科学技术的发展,计算机辅助设计技术越来越广泛的应用在各个领域。
现在,他已经突破了二位图纸电子化的框架,装向三维实体建模、动力学模拟仿真和有限元分析为主线的虚拟样机制作技术。
使用虚拟样机制作技术可以在设计阶段预测产品的性能,优化产品的设计,缩短产品的研制周期,节约开发费用。
机械系统动力学仿真分析软件ADAMS可以直接创建完全参数化的机械系统几何模型,也可以使用其它CAD软件(如:Pro/ENGINEER)传过来的造型逼真的几何模型;然后,在几何模型上施加约束、力/力矩和运动激励;最后对机械系统进行交互式的动力学仿真分析,在系统水平上真实地预测机械结构的工作性能,实现系统水平的最优设计。
目前不等长双横臂式悬架已广泛应用在轿车的前后悬架上,可以通过合理选择空间导向杆系的铰接点的位置及控制臂的长度,使得悬架具有合适的运动特性。
采用运动学原理和空间解析几何的方法,可以分析双横臂独立悬架的空间运动和前轮定位参数下轮胎的运动,提出轮胎磨损的评价指标,从而可以建立双横臂独立悬架的运动、前轮定位参数与轮胎磨损间关系的数学模型。
同时可以研究双横臂独立悬架初始状态和定位参数对轮胎磨损的影响以减少轮胎磨损。

万方数据・设计・计算.研究.悬架,其不同于传统结构之处在于下控制臂为双铰点结构,从而保证主销偏置距为负值,提高了制动时的回正性。
该结构的连杆布置使车轮中心到主销轴线偏置距变小.减小了绕主销轴线的惯性力矩。
能够实现精确的车轮定位.确保操纵稳定性和乘坐舒适性。
图1为前悬架右半部分示意图。
其中B4。
与B4:构成上控制臂,日3f4,与口4。
构成下控制臂,B4,为转向横拉杆,曰4。
为减振器,B4,为弹簧,C点为车轮中心点。
约束关系如下:转向节与上下控制臂及转向横拉杆分别在曰。
、毋、玩与日,点为球铰连接:车轮与转向节在C点为旋转副;上控制臂与副车架在A4:方向上为旋转副;减振器上端与下端鼠、A。
以及下控制臂与副车架连接处A,、A。
为万向节副;减振器上、下之间为圆柱副;横向稳定杆与转向齿条为移动副。
图1前悬架右半邵分不惹在ADAMS/CAR中建立模型有2种方法,一是直接在ADAMS/CAR中建模.利用软件提供的基本体进行组合.形成所需的模型;二是先在其它一些专业CAD软件(如UG、CATIA)中建立实体模型,再通过两个软件的接口将模型导入ADAMS/CAR中进行仿真。
比较2种方法,后者较前者建立的模型更加准确,更接近实际情况。
本文采用的是第2种方法,将CATIA中的前悬架模型导入ADAMS/CAR,具体如图2所示。
图2前悬架模型由图2可知.前悬架主要由减振器、弹簧、上控制臂、下控制臂、转向节和转向横拉杆组成。
按照前述的约束关系添加约束.并在副车架与车身之间添加橡胶衬套,使之组成完整的系统,具体如图3所示。
2009年第8期图3建立约束的前悬架模型整个前悬架系统的自由度Ⅳ为:N=6n—-EK=6x21—-124--2式中,/7,为有相对运动的部件总数;∑K为系统刚性约束之和。
这2个自由度分别是悬架左、右两侧摆臂的上、下摆动,即减振器的上、下跳动。
在进行仿真时引入转向系统和传动系统,在ADAMS/CAR中的仿真模型如图4所示。
设计与研究Design and Research基于ADAMS的双横臂悬架系统仿真ADAMS double wishbone suspension system simulation based on赵 妞(金肯职业技术学院 汽车与机械工程系)摘 要:本文运用ADAMS/Car对双横臂独立悬架进行建模并仿真,在观察悬架运 动过程中,初步验证了运用ADAMS/Car进行汽车悬架建模仿真的合理性,从而为悬架的设计提供了一种新的可行性方案。
关键词:车辆工程 双横臂悬架 仿真中图分类号:U463.33Abstract: in this paper, using ADAMS/Car modeling and Simulation of the double wishbone independent suspension, in the observation of suspension movement process, preliminaryvalidate the rationality of the use of ADAMS/Car vehicle suspension system modeling andsimulation, which provides a new feasible scheme for suspension design.Keywords: vehicle engineering double wishbone suspension simulation1 ADAMS/Car简介及双横臂悬架系统的结构分析A D A M S/C a r模块分为S t a n d a r d(标准)和Template Builder(模板建模器)两种模式,并对应不同的菜单界面功能。
其中,标准模式是以模板为基础对已存在的半车模型和整车模型进行仿真分析。
双横臂式独立悬架的两个摆臂长度可以相等,也可以不等,按上下摆臂是否相等,可以分为等长双横臂式和不等长双横臂式两种。
基于ADAMS/Car 的双叉臂独立悬架优化设计张学荣1王若平1李成彬1严小俊2类雪2(1江苏大学汽车与交通工程学院,镇江212013)(2南京汽车集团有限公司名爵分公司,南京210031)Optimum design of double-wishbone independent suspension based on ADAMS/CarZHANG Xue-rong 1,WANG Ruo-ping 1,LI Cheng-bin 1,YAN Xiao-jun 2,LEI Xue 2(1School of Automobile and Traffic Engineering ,Jiangsu University ,Zhenjiang 212013,China )(2Nanjing Automobile(Group )Corporation ,Nanjing 210031,China )文章编号:1001-3997(2009)12-0264-03【摘要】利用ADAMS 建立了某国产跑车的双叉臂独立悬架的虚拟样机模型。
在ADAMS/CAR 中针对该跑车悬架系统进行仿真,研究悬架参数对操纵稳定性的影响并分析在路试过程中出现的操纵稳定性较差、轮胎磨损严重等问题的原因。
通过优化分析提出了悬架参数的改进意见。
关键字:ADAMS ;双叉臂式独立悬架;操纵稳定性;优化设计【Abstract 】It a virtual prototype model of a double-wishbone independent suspension of a certain domestic sports car was established under ADAMS .With the help of ADAMS/CAR ,the suspension system of this sports car has been simulated in order to study the effect of the suspension parameters on vechile handing stability and analyse the problems such as poor vechile handing stability ,serious tire wear and so on.Through the optimum design ,a improved suspension is obtained.Key words :ADAMS ;Double-wishbone independent suspension ;Vechile handing stability ;Op -timum design中图分类号:TH12,U463.1文献标识码:A*来稿日期:2009-02-201前言目前,跑车的导向机构大多是双叉臂式悬架,又称双A 臂式独立悬架。
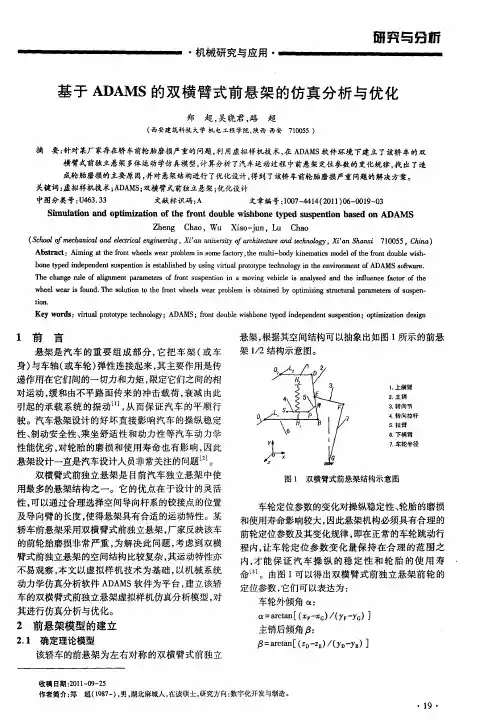
基于ADAMS的双横臂独立悬架的仿真分析及优化设计双横臂独立悬架是一种常见的汽车悬架结构,在承载、减震等方面都有良好的表现。
本文将基于ADAMS软件对双横臂独立悬架进行仿真分析及优化设计。
首先,建立模型。
模型包括车辆、轮胎和悬架三部分。
车辆和轮胎可以在ADAMS软件库中选择合适的模型,而悬架部分需要根据实际情况进行建模。
本文选用的汽车型号为A车型,采用铝合金材料制作。
悬架部分包括上下控制臂、防滚杆、弹簧和减震器。
其次,进行初始仿真分析。
在初始状态下,车辆是静止的,因此只需分析悬架部分的静态特性。
通过仿真分析,可以得出悬架的几何参数、弹簧刚度和减震器阻尼等关键参数,为后续优化设计提供依据。
接着,进行参数优化设计。
通过改变几何参数、弹簧刚度和减震器阻尼等参数,分析对悬架性能的影响。
优化的目标是使悬架在承载和减震方面达到最佳性能。
可以采用遗传算法等优化算法进行参数优化,以求得最优解。
最后,进行动态仿真分析。
在动态情况下,车辆会受到外部力的作用,因此需要对悬架进行动态特性分析。
通过动态仿真分析,可以得出悬架的动态特性,包括自然频率、振幅和动态刚度等重要参数。
根据这些参数,可以进一步改进悬架的设计,使其在动态工况下具有更好的性能表现。
综上所述,基于ADAMS的双横臂独立悬架的仿真分析及优化设计有着广泛的应用前景。
通过仿真分析和参数优化设计,可以大大缩短产品研发周期,降低研发成本,提高产品的可靠性和性能表现。
为了更好地进行双横臂独立悬架的仿真分析及优化设计,需要对其相关数据进行收集和分析。
以下是一些重要数据及其分析:1. 车辆重量:车辆重量是影响悬架设计和性能的重要因素。
一般来说,车辆重量越大,悬架需要承受的压力也就越大,因此需要更强的支撑力来保证悬架的性能。
在优化设计过程中,需要充分考虑车辆重量对悬架性能的影响,以使悬架在承载方面具有较好的表现。
2. 弹簧刚度:弹簧刚度是指在径向方向施加单位力量时,弹簧产生的变形量。
基于ADAMS的双横臂悬架性能多目标优化研究李瑜婷,赵治国,章 桐(同济大学汽车学院,上海 201804)摘要:针对某微型电动车操纵稳定性不佳的问题,基于ADAMS/Car建立了某双横臂前悬架运动学模型并对其进行了仿真分析,利用ADAMS/Insight选取了适当的硬点坐标作为优化变量,以各定位参数变化范围最小为优化目标,采用统一目标法将多目标函数转化为单目标函数,并在ADAMS/View中对前轮定位参数进行了优化。
仿真结果表明:该双横臂悬架的运动学性能得到了有效改善。
关键词:悬架运动学;ADAMS;多目标优化中图分类号:U463.33+1 文献标识码:A 文章编号:1672-1616(2009)17-0030-05 悬架是连接车轮与车架的弹性传力装置,它与汽车的操纵稳定性、平顺性及安全性等性能均有关。
悬架运动学主要研究内容是车轮定位参数与悬架变形量(或车轮跳动量)的关系[1],随着各种形式的独立悬架的出现和应用,车轮定位参数在行驶过程中所引起的运动学变化对汽车操纵稳定性有着很大的影响。
双横臂悬架作为目前应用最广泛的独立悬架之一,其主要优点是:运动规律可以设计,对前轮定位参数的变化和侧倾中心位置的变化的设定自由度较大,如果能适当地选择设计参数,可以使车辆得到很好的操纵性和平顺性。
本文针对某轮毂电机微型电动车行驶过程中所产生的过多转向问题,针对双横臂悬架的特性,利用ADAMS软件对其进行建模分析,并根据仿真分析的结果确定优化目标并建立多目标优化函数,对悬架运动学性能进行优化,突破以往的单目标优化或是平面优化的局限,对悬架进行了多目标空间结构的优化。
1 建模及仿真分析1.1 双横臂悬架运动学模型的简化为了便于分析,在建立前悬架的多刚体运动学模型时,要对其作一定的合理简化。
考虑到悬架运动学分析的目的是为了得到各前轮定位参数与车轮上下跳动量之间的关系,故将悬架简化为一个多连杆机构,在进行运动学分析时,只需确定几个铰接点的位置,即可进行运动学分析。
(a)(b)图3工况2温度场分布图5小结(1)运用MSC.MRC有限元软件,对铝锭半连续铸造过程进行了热力耦合分析;分析了初始温度、拉坯速度及结晶器冷却能力对铝锭温度场和应力场的影响。
(2)模拟现场工艺条件,建立了铝合金大扁锭半连续铸造仿真计算的有限元模型,根据现场工艺,确定了相应的边界条件。
(3)仿真结果与现场实验观测结果基本吻合,说明了仿真分析的准确性,同时,仿真分析为确定正确的工艺参数,寻找改善应力场分布的途径,探索抑制裂纹出现的措施提供了依据,能够很好的用于半连续铸造过程的仿真研究。
参考文献1单长智,王立娟,王德满.实心圈锭的应力分析及防止裂纹的措施[J],轻合金加工技术,1997(25):1 ̄4.2李晓谦,胡仕成,快速铸轧中的接触热导及带坯在铸轧区的温度分布的仿真分析[J].重型机械,1999(3):34 ̄37.3段湘安.铸轧辊套传热的集肤效应与参数影响的数值仿真研究:[硕士论文].长沙:中南大学机电工程学院.2002.4邢书明.难变形钢铁材料半固态连铸技术研究[D].北京:北京科技大学出版社,1996.5邢书明,李亚敏,胡汉起.半固态连铸过程拉漏(断)机理研究[J].特种铸造及有色合金,2000(1):16 ̄19.6杨世铭,陶文铨,传热学[M].北京:高等教育出版社,2003.7干勇,仇圣桃,萧泽强.连续铸钢过程数学物理模拟[M].北京:冶金工业出版社,2001.8李毅波.连续铸轧多场耦合建模及工艺参数匹配规律的仿真研究:[硕士论文].长沙:中南大学机电工程学院,2005.9陈火红,于军泉,席源山.基础与应用实例[M].北京:科学出版社.2004.10Msc.Software.Msc.Marc2005(VolumeA):TheoryandUserInformation.[M]MSC.Software.2005.基于ADAMS的双横臂独立悬架优化仿真分析于海峰于学兵(大连理工大学动力与能源工程学院,大连116023)SimulationanalysisandoptimizationofdoublewishbonesuspensionbasedonADAMS/CARYUHai-feng,YUXue-bing(DalianUniversityOfTechnology,SchoolofEnergyandPowerEngineering,Liaoning,Dalian116023)!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!"!!!!!!!!!!!!"!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!"!!!!!!!!!!!!"【摘要】利用机械系统动力学分析软件ADAMS,建立了带有转向系统的双横臂独立前悬架虚拟样机模型。
基于ADAMS的双叉臂式独立前悬架仿真分析双叉臂式独立前悬架是一种常见的汽车前悬架形式。
在这种悬架系统中,悬架的每个轮子都被单独固定在车辆的车体上,而不是通过一个轴连接在一起。
这种设计使得车辆的悬挂系统可以更好地适应不平的路面,并提高汽车的稳定性和操控性。
本文将基于ADAMS软件对双叉臂式独立前悬架进行仿真分析。
首先,我们需要绘制双叉臂式独立前悬架的模型,并对其进行建模。
我们需要确定每个零件的几何形状和材料属性,以及每个零件与其他零件之间的连接方式。
在ADAMS中,我们可以使用现有的汽车模型,也可以自己绘制模型进行仿真。
接下来,我们需要设置模拟的运行条件,包括路面条件、车辆速度和悬挂系统的初参数。
在ADAMS中,我们可以使用不同类型的道路车辆移动器和仿真器来模拟不同类型的路面条件和速度。
然后,我们可以进行仿真实验,观察双叉臂式独立前悬架的运动和响应。
我们可以观察悬架的行程、轮胎垂直位移、车辆横向加速度、车轮动能和悬挂系统的应变等指标。
我们还可以对不同的悬挂系统参数进行优化,以提高汽车的性能和稳定性。
最后,我们需要对仿真实验进行数据分析,以便更好地了解双叉臂式独立前悬架的特点和性能。
我们可以使用ADAMS的数据处理工具来分析和比较不同实验的结果,并生成图表或报告以便更好的辨别和了解结果。
总之,在ADAMS软件上进行双叉臂式独立前悬架的仿真分析可以为汽车制造商和设计工程师提供重要的数据和信息,并帮助他们改进悬挂系统方案,提高汽车的性能和安全性。
双叉臂式独立前悬架是一项重要的汽车悬挂系统技术,其受到了广泛的关注和研究。
在进行仿真分析时,我们可以收集和分析许多相关数据,以更好地评估和优化悬挂系统的性能和稳定性。
以下是一些可能相关的数据指标:1. 悬架的行程:悬架的行程是指悬架系统的可用行程,即悬架系统可以接受的最大垂直位移。
悬架的行程可以影响车辆的行驶平稳性和舒适性,对于后续车辆运动学分析也有很大的影响。
基于ADAMS的双叉臂悬架系统动力学研究
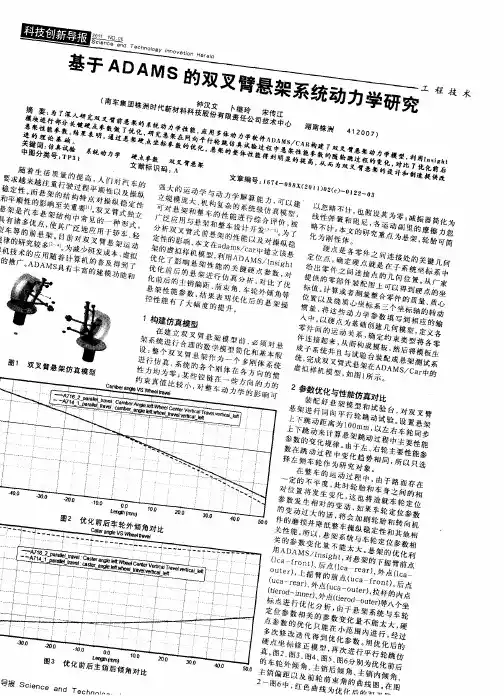
摘要:为了深入研究双叉臂前悬架的系统动力学性能,应用多体动力学软件ADAMS/CAR构建了双叉臂悬架动力学模型,利用Insight 模块进行部分关键硬点参数做了优化,研究悬架在同向平行轮跳仿真试验过程中悬架性能参数的随轮跳过程的变化,对比了优化前后悬架性能参数。
结果表明,通过悬架硬点坐标参数的优化,悬架的整体性能得到明显的提高,从而为双叉臂悬架的设计和制造提供改进的理论基础。
关键词:仿真试验系统动力学硬点参数双叉臂悬架
随着生活质量的提高,人们对汽车的要求越来越注重行驶过程平顺性以及操纵稳定性。
而悬架的结构特点对操纵稳定性和平顺性的影响至关重要[1]。
双叉臂式独立悬架是汽车悬架结构中常见的一种形式,具有诸多优点,使其广泛地应用于轿车、轻型车等的前悬架。
目前对双叉臂悬架运动规律的研究较多[2~4]。
为减少研发成本,虚拟样机技术的应用随着计算机的普及得到了大的推广。
ADAMS具有丰富的建模功能和强大的运动学与动力学解算能力,可以建立规模庞大、机构复杂的系统级仿真模型,可对悬架和整车的性能进行综合评价,被广泛应用与悬架和整车设计开发[5~8]。
为了分析双叉臂式前悬架的性能以及对操纵稳定性的影响,本文在adams/car中建立该悬架的虚拟样机模型,利用ADAMS/Insight优化了影响悬架性能的关键硬点参数,对优化前后的悬架进行仿真分析,对比了优化前后的主销偏距、前束角、
车轮外倾角等悬架性能参数,结果表明优化后的悬架操控性能有了大幅度的提升。
1 构建仿真模型
在建立双叉臂悬架模型前,必须对悬架系统进行合理的数学模型简化和基本假设:整个双叉臂悬架作为一个多刚体系统进行仿真,系统的各个刚体在各方向的惯性力均为零;某些铰链在一些方向的力的约束真值比较小,对整车动力学的影响可以忽略不计,也假设其为零;减振器简化为线性弹簧和阻尼,各运动副里的摩擦力忽略不计;本文的研究重点为悬架,轮胎可简化为刚性体。
硬点是各零件之间连接处的关键几何定位点,确定硬点就是在子系统坐标系中给出零件之间连接点的几何位置。
从厂家提供的零部件装配图上可以得到硬点的坐标值。
计算或者测量整合零件的质量、质心位置以及绕质心坐标系三个坐标轴的转动惯量,将这些动力学参数填写到相应的输入中。
以硬点为基础创建几何模型,定义各零件间的运动关系,确定约束类型将各零件连接起来,从而构成模板,然后将模板生成子系统并且与试验台装配成悬架测试系统,完成双叉臂式悬架在ADAMS/Car中的虚拟样机模型,如图1所示。
2 参数优化与性能仿真对比
装配好悬架模型和试验台,对双叉臂悬架进行同向平行轮跳动试验。
设置悬架上下跳动距离为100mm,以左右车轮同步上下跳动来计算悬架跳动过程中主要性能参数的变化规律。
由于左、右轮主要性能参数在跳动过程中变化趋势相同,所以只选择左侧车轮作为研究对象。
在整车的运动过程中,由于路面存在一定的不平度,此时轮胎和车身之间的相对位置将发生变化,这也将造就车轮定位参数发生相对的变动,如果车轮定位参数的变动过大的话,将会加剧轮胎和转向机件的磨损并降低整车操纵稳定性和其他相关性能。
所以,悬架系统与车轮定位参数相关的参数变化量不能太大。
悬架的优化利用ADAMS/Insight,对悬架的下摇臂前点(lca-front)、后点(lca-rear)、外点(lca-outer),上摇臂的前点(uca-front)、后点(uca-rear)、外点(uca-outer),拉杆的内点(tierod-inner)、外点(tierod-outer)等八个坐标点进行优化分析,由于悬架系统与车轮定位参数相关的参数变化量不能太大,硬点参数的优化只能在小范围内进行,经过多次修改迭代得到优化参数。
用优化后的硬点坐标修正模型,再次进行平行轮跳仿真。
图2、图3、图4、图5、图6分别为优化前后的车轮外倾角、主销后倾角、主销内倾角、主销偏距以及前轮前束角的曲线图。
在图2~图6中,红色曲线为优化后的双叉臂悬架虚拟样机试验得出的,蓝色为未优化的双叉臂悬架虚拟样机仿真试验得到的。
对比研究的结果表明,优化后的性能参数明显优于优化前的。
(1)车轮外倾角(camber angle)。
为防止车轮出现过大的不足转向或者过度转向趋势,一般希望车轮从满载位置起上下跳动±50mm的范围内,车轮外倾角变化在-2°~1°之间[9]。
从图2可以看出,优化前车轮外倾角变化范围为-1.25°~0.75°,而优化后的车轮外倾角变化范围为-1.04°~0.75°,优化后不仅车轮外倾角变化范围变小,而且最值也变小,减少了不足转向或者过大转向的趋势,增强了整车的行驶稳定性。
(2)主销后倾角(caster angle)。
主销后倾角为正值时有抑制制动时点头的作用,保证车轮具有合适的回正力矩,使车轮复位以提高整车直线行驶的稳定性。
主销后倾角在车轮上下运动过程中不会出现大的变化,以免在载荷变化时出现回正力矩过大或者过小的现象,使操纵稳定性变差。
但是如果太大会使车轮支撑处反力矩过大,造成车轮摆振或者转向盘力的变化,一般要求主销后倾角在3°~6°之间[9]。
图3中所示的曲线表明,未优化的悬架主销后倾角在5.4°~5.5°之间,优化后的在3.28°~4.06°之间,由图3可见,优化后主销后倾角的幅值大大减小,有利于抑制制动点头,同时提高了悬架系统的直线行驶稳定性。
(3)主销内倾角(kingpin inclination angle)。
主销内倾角可以使汽车转向自动回正和转向操作轻便,在车轮跳动时,主销内倾角变化较大,将会使转向沉重,加速轮胎磨损。
实际设计
时,大致的范围在7~13,希望取较小数值[9]。
因此设计要求主销内倾角不能太大,从图4中可以看出,双叉臂式悬架优化前、后的主销内倾角变化范围分别是9.1°~11.3°与7.4°~9.2°。
不仅变化区间大为变小,最值也大幅度的变小,提高了汽车的转向能力,转向操作更为轻便,减小了轮胎的磨损。
(4)主销偏距(scrub radius)。
汽车转向时,转向轮绕主销转动,地面对转向的阻力力矩与主销偏距的大小成正比,主销偏距越小,转向力矩也越小,所以设计要求一般希望主销偏距小一些,以减小转向操纵力以及地面对转向系统的冲击。
主销偏距与主销内倾角是密切相关的,通过调整主销内倾角可以得到不同的主销偏距。
从图5看出,优化前的主销偏距在33.09~34.48mm之间,然而优化后主销偏距28.85~29.96mm之间,幅值和范围减少,使得悬架操作稳定性能得到提升。
(5)前轮前束角(toe angle)。
车轮前束角的作用主要是减少汽车前进中因前轮外倾和纵向阻碍力致使前轮前端向外滚开所造成的不良后果。
对于汽车前轮,车轮上跳动的前束角值大多设计在零附近变化。
设计值取在零附近是为了控制直行时由路面的凹凸引起的前束变化,确保良好的直行稳定性。
另外,此弱负前束的变化是为了使整车获得弱的不足转向特性[9]。
当车轮行驶时,前束的变化过大,将会影响车辆的直线行驶稳定性,同时
增大与地面间的滚动阻力,加剧轮胎的磨损,因此前束角的设计原则是车轮跳动时,变化量越小越好。
如图6所示,双叉臂式悬架优化后变化幅度大幅变小,增强直线稳定性,提高悬架的操纵稳定性能。
从上述的五个参数的对比可以得出看出,优化后的双叉臂悬架在各个参数上都有显著的改善,各个系统性能和悬架的整体操纵稳定性要要提高很多,从而为双叉臂悬架的设计和制造提供改进的理论依据,对实际的悬架设计过程具有指导作用。
3 结语
应用多体动力学软件ADAMS,对双叉臂前悬架的系统动力学性能做了深入研究。
构建了双叉臂悬架模型并利用ADAMS/Insight,对模型部分关键硬点坐标进行迭代运算,选取五项悬架性能指标作为目标函数进行优化,经过多次修改迭代得到优化参数。
对悬架在同向平行轮跳仿真过程坐了探讨,研究了系统动力学参数的随轮跳过程的变化,对比了优化前后影响悬架性能的特性参数。
仿真试验的结果表明,通过悬架硬点坐标参数的优化,使得转向操作更为轻便,轮胎的磨损更小,悬架的整体性能得到大幅度提高,探索了提高悬架性能的途径,从而为双叉臂悬架的设计和制造提供改进的理论依据。