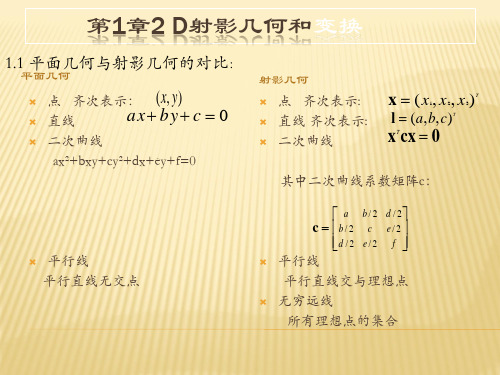
计算机视觉中的多视图几何 3D射影几何和变换 直线的齐次表示
- 格式:ppt
- 大小:332.50 KB
- 文档页数:9

计算机形学与三维建模基础知识计算机形学与三维建模是计算机科学领域中重要的研究方向,它们为实现计算机图形学、计算机动画、虚拟现实等应用提供了基础。
本文将介绍计算机形学的概念、三维建模的基本原理和常用方法,并探讨它们在现实生活和工业设计中的应用。
一、计算机形学概念及原理计算机形学是研究数学模型和算法,用来描述和生成计算机图形的学科。
它主要包括几何学、多边形网格、体素表示、参数曲面和曲线、光照与着色等方面的内容。
1. 几何学几何学是计算机形学的核心内容之一,它研究空间中点、线、面等基本几何元素的性质和关系。
在计算机图形学中,常用的几何表示方法包括笛卡尔坐标系、二维和三维向量、矩阵和变换等。
2. 多边形网格多边形网格是计算机图形中最常用的表示方法之一,它使用一系列相连的边或面来表示二维或三维图形。
多边形网格可以通过划分和连接细分而成,常见的多边形网格有三角形、四边形、六边形等。
3. 体素表示体素表示是一种将三维物体分割成小块的表示方法,每个小块称为一个体素。
体素表示适用于描述具有复杂内部结构的物体,例如人体、机械零件等。
体素表示可以使用二值图像或三维数组来表示。
4. 参数曲面和曲线参数曲面和曲线是计算机形学中用来描述平面曲线和曲面的方法。
它们通过一系列参数方程来表示,可以用来模拟自然界中的弯曲物体,例如球体、螺旋线等。
5. 光照与着色光照与着色是计算机形学中模拟光线、阴影和反射等光学效果的技术。
它们可以用来增强计算机图形的真实感和立体感,使得图形更加逼真和美观。
二、三维建模方法与应用三维建模是将真实世界的物体或场景用计算机模型进行描述和重现的过程。
它是计算机图形学中的重要研究方向,广泛应用于游戏开发、影视特效、产品设计等领域。
1. 多边形建模多边形建模是三维建模中最常用的方法之一,它使用多边形网格来描述物体的表面。
多边形建模可以通过直接绘制、三维扫描、参数化建模等方式进行。
2. 曲面建模曲面建模是通过参数方程来描述物体表面的方法。

计算机形学中的几何变换与投影技术计算机形学是计算机科学与计算机图形学中重要的一个领域,它研究如何在计算机上对图形进行表示、创建、编辑和呈现。
其中,几何变换和投影技术是计算机形学中常用且核心的技术之一,它们在计算机图形学领域中被广泛应用。
一、几何变换在计算机图形学中,几何变换是指对图形进行平移、旋转、缩放和扭曲等操作,从而改变图形的位置、形状和大小,以满足特定需求。
1. 平移变换平移变换是对图形进行沿着指定方向和距离的移动。
在二维空间中,平移变换可以表示为:x' = x + dxy' = y + dy其中,(x', y')是平移后的坐标,(x, y)是原始坐标,(dx, dy)是平移的向量。
2. 旋转变换旋转变换是对图形进行绕指定点或绕原点的旋转操作。
在二维空间中,旋转变换可以表示为:x' = x * cosθ - y * sinθy' = x * sinθ + y * cosθ其中,(x', y')是旋转后的坐标,(x, y)是原始坐标,θ是旋转角度。
3. 缩放变换缩放变换是对图形进行放大或缩小的操作。
在二维空间中,缩放变换可以表示为:x' = x * sxy' = y * sy其中,(x', y')是缩放后的坐标,(x, y)是原始坐标,(sx, sy)是缩放因子。
4. 扭曲变换扭曲变换是对图形进行形状的变换,使得某些部分被拉伸或收缩。
扭曲变换可以通过矩阵运算进行表示,具体操作较为复杂。
二、投影技术在计算机图形学中,投影技术是指将三维空间中的图形映射到二维平面上的过程。
常见的投影技术包括平行投影和透视投影。
1. 平行投影平行投影是一种保持图形中平行线在投影后保持平行的投影方式。
在三维空间中,平行投影可以表示为:x' = xy' = y其中,(x', y')是投影平面上的坐标,(x, y)是三维空间中的坐标。

计算机视觉中的多视几何多视几何是计算机视觉领域中的一个重要分支,它研究如何从多个视角的图像中获取三维物体的信息。
本文将介绍多视几何的基本概念、常见方法以及应用。
一、多视几何的基本概念多视几何主要研究相机之间的空间关系及其对图像的几何变换。
在多视几何中,通常假设相机遵循针孔相机模型,即相机投影是通过沿光线将三维点投影到成像平面上的方式实现的。
这种假设简化了多视几何问题的数学表述。
在多视几何中,存在着多个视角或相机,每个视角拍摄到的图像都包含了一部分目标物体的信息。
不同视角下的图像可以通过几何变换相互对应,从而形成更全面的物体描述。
多视几何的目标是通过对多个视角下的图像进行分析和匹配,获得物体的三维结构和姿态。
二、多视几何的常见方法1.立体视觉立体视觉是多视几何的一个重要分支,它主要关注于从成对的立体图像中恢复场景中物体的深度信息。
立体视觉的主要任务是进行视差估计,即在两个视图中找到对应的特征点,并通过视差值计算物体的深度。
常用的立体视觉方法包括基于特征点匹配的方法、基于区域的方法以及基于能量优化的方法。
2.三维重建三维重建是多视几何的另一个重要研究方向,它旨在通过多个视角下的图像恢复出物体的三维结构。
三维重建的主要任务是通过多视图几何的理论和方法,将多个二维图像中的特征点或特征区域对应起来,并通过三角剖分和立体校正等技术进行三维重建。
常见的三维重建方法包括基于立体匹配的方法、基于结构光的方法以及基于视差图的方法。
3.多视图几何与运动恢复多视图几何与运动恢复关注的是相机的运动估计和3D结构恢复问题。
例如,基于特征点匹配的方法可以通过计算相邻帧之间的运动矩阵来估计相机的运动。
通过多个相机的视角,可以利用多视图的几何关系计算出物体的相对位置和运动轨迹。
三、多视几何的应用1.3D建模与重建多视几何可以用于三维建模与重建,例如通过从多个视角拍摄的图像生成三维模型。
这在虚拟现实、游戏开发、建筑设计等领域都有广泛的应用。

点云数据处理学习笔记三维计算视觉研究内容包括: 1)三维匹配:两帧或者多帧点云数据之间的匹配,因为激光扫描光束受物体遮挡的原因,不可能通过⼀次扫描完成对整个物体的三维点云的获取。
因此需要从不同的位置和⾓度对物体进⾏扫描。
三维匹配的⽬的就是把相邻扫描的点云数据拼接在⼀起。
三维匹配重点关注匹配算法,常⽤的算法有和各种全局匹配算法。
2)多视图三维重建:计算机视觉中多视图⼀般利⽤图像信息,考虑多视⼏何的⼀些约束,射影⼏何和多视图⼏何是视觉⽅法的基础,在摄影测量中类似的存在共线⽅程。
光束平差法是该类研究的核⼼技术。
这⾥也将点云的多视匹配放在这⾥,⽐如⼈体的三维重建,点云的多视重建不再是简单的逐帧的匹配,还需要考虑不同⾓度观测产⽣误差累积,因此存在⼀个针对三维模型进⾏优化或者平差的过程在⾥⾯。
多视图三维重建这⾥指的只是静态建模,输⼊是⼀系列的图像或者点云集合。
可以只使⽤图像,或者只使⽤点云,也可以两者结合(深度图像)实现,重建的结果通常是Mesh⽹格。
SFM(运动恢复结构) vs Visual SLAMMulti-View Stereo (MVS)多视图⽴体视觉,研究图像⼀致性,实现稠密重建。
3)3D SLAM 按照传感器类型分类:可以分为基于激光的SLAM和基于视觉的SLAM。
基于激光的SLAM可以通过点云匹配(最近点迭代算法 ICP、正态分布变换⽅法 NDT)+位姿图优化(、LUM、ELCH、Toro、SPA)来实现;实时激光3D SLAM算法(LOAM,Blam,CartoGrapher等);Kalman滤波⽅法。
通常激光3D SLAM侧重于定位,在⾼精度定位的基础上可以产⽣3D点云,或者Octree Map。
基于视觉(单⽬、双⽬、鱼眼相机、深度相机)的SLAM,根据侧重点的不同,有的侧重于定位,有的侧重于表⾯三维重建。
不过都强调系统的实时性。
(1)侧重于定位的VSLAM系统⽐如orbSLAM,lsdSLAM;VINS是IMU与视觉融合的不错的开源项⽬。
第一章计算机图形学是:研究怎么利用计算机来显示、生成和处理图形的原理、方法和技术的一门学科。
计算机图形学的研究对象是图形。
构成图形的要素有两类:一类是几何要素(刻画图形状的点、线、面、体),另一类是非几何要素(反映物体表面属性或材质的明暗、灰度、色彩).。
计算机中表示图和形常有两种方法:点阵法和参数法。
软件的标准:SGI等公司开发的OpenGL,微软开发的Direct X,Adobe的Postscript 等。
计算机辅助设计与制造(CAD/CAM)计算机图形系统可以定义为计算机硬件、图形输入输出设备、计算机系统软件和图形软件的集合。
交互式计算机图形系统应具有计算、存储、对话、输入和输出等五方面的功能。
真实感图形的生成一般须经历场景造型、取景变换、视域裁剪、消除隐藏面及可见面光亮度计算等步骤。
虚拟现实系统又称虚拟现实环境,是指由计算机生成的一个实时三维空间。
用户可以在其中“自由地”运动,随意观察周围的景物,并可通过一些特殊的设备与虚拟物体进行交互操作。
科学计算可视化是指运用计算机图形学和图像处理技术,将科学计算过程中及计算结果的数据转换为图形及图像在屏幕上显示出来并进行交互处理的理论、方法和技术。
第二章鼠标器是用来产生相对位置。
鼠标器按键数分为两种:MS型鼠标(双按键鼠标)和PC型鼠标(三按键鼠标)。
触摸屏也叫触摸板,分为:光学的红外线式触摸屏、电子的电阻式触摸屏和电容式触摸屏、声音的声波式触摸屏。
数据手套是由一系列检测手和手指运动的传感器的构成。
来自手套的输入可以用来给虚拟场景中的对象定位或操纵该场景。
显示设备的另一个重要组成部分的是显示控制器。
它是控制显示器件和图形处理、转换、信号传输的硬件部分,主要完成CRT的同步控制、刷新存储器的寻址、光标控制以及图形处理等功能。
阴极射线管CRT由电子枪、偏转系统及荧光屏3个基本部分组成。
电子枪的主要功能是产生一个沿管轴(Z轴)方向前进的高速的细电子束(轰击荧光屏)。
计算机形学三维几何变换计算机形学是计算机科学中的一个重要分支,主要研究计算机图形学中的各类图形的数学描述方法和计算机图形学技术的应用。
其中,三维几何变换是计算机形学中的一项重要内容。
本文将介绍三维几何变换的概念、常见的三维几何变换操作以及其在计算机图形学中的应用。
一、概述三维几何变换是指对三维空间中的图形进行平移、旋转、缩放等操作,从而改变图形的位置和形状的过程。
三维几何变换是计算机图形学中非常常用的操作,可以实现物体的移动、旋转、缩放等效果。
二、三维几何变换的操作1. 平移(Translation)平移是指将图形沿指定的轴方向移动一定距离。
平移操作可以简单地理解为将图形的每一个顶点坐标向指定方向移动相同距离。
平移操作的数学表达式为:\[T(x,y,z) = (x + dx, y + dy, z + dz)\]其中,(x,y,z)表示原始顶点坐标,(dx,dy,dz)表示沿(x,y,z)轴平移的距离。
2. 旋转(Rotation)旋转是指将图形绕指定轴进行旋转。
旋转操作可以用欧拉角、四元数、矩阵等多种方式进行计算。
旋转操作的数学表达式为:\[R(x,y,z) = M(x,y,z)\]其中,(x,y,z)表示旋转前的坐标,M表示旋转变换矩阵。
旋转变换矩阵的计算方式有很多,最常见的是使用旋转角度和旋转轴来计算旋转矩阵。
3. 缩放(Scaling)缩放是指将图形沿各个轴向相应的方向按比例进行扩大或缩小。
缩放操作可以用不同的比例因子对每个顶点坐标进行缩放计算。
缩放操作的数学表达式为:\[S(x,y,z) = (sx, sy, sz)(x,y,z)\]其中,(x,y,z)表示原始顶点坐标,(sx,sy,sz)表示在x轴、y轴和z轴方向的缩放比例。
4. 其他变换操作除了平移、旋转和缩放之外,三维几何变换还可以包括倾斜、翻转、剪切等其他操作。
这些操作都是通过对图形的顶点坐标进行适当的数学计算而实现。
三、三维几何变换的应用三维几何变换在计算机图形学中有广泛的应用。
计算机图形学中的名词解释计算机图形学是一门研究通过计算机技术来生成、处理和显示图像的学科。
在计算机图形学中,有许多重要的名词和概念需要解释,下面将逐一介绍这些名词,并探讨其在计算机图形学中的作用和意义。
1. 点(Pixel)在计算机图形学中,点是图像的基本单元。
点由一组数据表示,通常用来描述图像在屏幕上的位置和颜色。
屏幕上的每个点都有其特定的坐标和颜色信息,通过组合这些点,可以形成任意复杂的图像。
2. 线(Line)线是由点组成的一系列连续的点的集合。
在计算机图形学中,线通常用于表示直线、曲线和多边形等几何形状。
通过指定线的起始点和终点,可以绘制各种形状的线段。
3. 多边形(Polygon)多边形是由多条线段组成的闭合曲线。
在计算机图形学中,多边形常用于描述平面图形,如矩形、三角形和圆形等。
通过确定多边形的顶点坐标和连接顺序,可以生成各种不同形状的平面图案。
4. 三维模型(3D Model)三维模型是指在三维空间中描述物体形状和结构的数据表示。
在计算机图形学中,三维模型通常由一系列顶点、边和面组成。
通过对三维模型的实时渲染和变换,可以在计算机屏幕上呈现出逼真的三维场景。
5. 渲染(Rendering)渲染是指将图形模型转化为可视图像的过程。
在计算机图形学中,渲染包括光照计算、阴影生成、纹理映射等操作,通过对模型进行逐像素的计算和处理,最终生成逼真的图像。
6. 着色(Shading)着色是指为模型表面分配颜色和光照效果的过程。
在计算机图形学中,着色算法可以根据光照模型和材质特性,为三维模型的表面添加逼真的颜色和明暗效果,以增强图像的真实感。
7. 纹理映射(Texture Mapping)纹理映射是指将一幅二维图像贴到三维模型表面的过程。
在计算机图形学中,通过将具有纹理信息的图像与三维模型进行关联,可以使模型表面展现出复杂的材质和细腻的纹理效果。
8. 光线追踪(Ray Tracing)光线追踪是一种逆向的渲染技术,通过模拟光线在场景中的传播和反射过程,计算出每个像素的颜色和光照效果。