2020届一轮复习人教版 动力学之“三大基本模型” 学案
- 格式:doc
- 大小:2.33 MB
- 文档页数:13
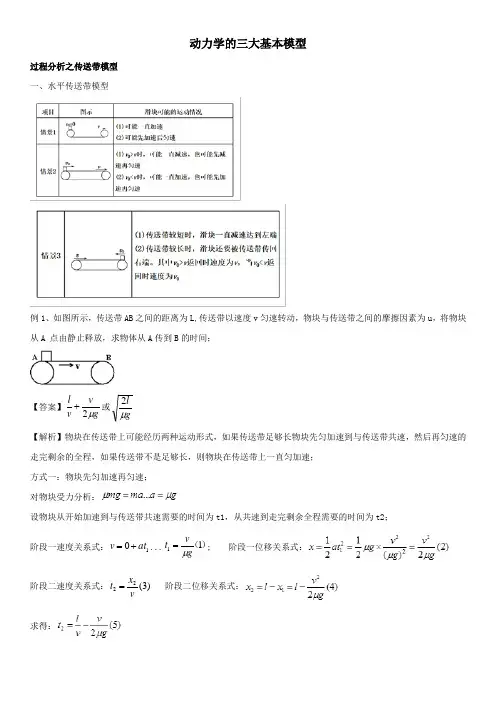
动力学的三大基本模型过程分析之传送带模型 一、水平传送带模型例1、如图所示,传送带AB 之间的距离为L,传送带以速度v 匀速转动,物块与传送带之间的摩擦因素为u ,将物块从A 点由静止释放,求物体从A 传到B 的时间;【答案】g v v l μ2+或gl μ2 【解析】物块在传送带上可能经历两种运动形式,如果传送带足够长物块先匀加速到与传送带共速,然后再匀速的走完剩余的全程,如果传送带不是足够长,则物块在传送带上一直匀加速; 方式一:物块先匀加速再匀速; 对物块受力分析:设物块从开始加速到与传送带共速需要的时间为t1,从共速到走完剩余全程需要的时间为t2; 阶段一速度关系式:10at v +=...)(11gvt μ=; 阶段一位移关系式:阶段二速度关系式:)3(22vx t =阶段二位移关系式:求得:所以从AB 传送到B 的总时间为:方式二、物块在传送带上一直匀加速到另一端; 对物块受力分析:对物体进行运动分析,如果传送带不是足够长,物块在传送带上一直匀加速;221at l =得glt μ2=,所以物块从A 传送到B 的时间为glt μ2=或g v v l t μ2+=方法总结:如图所示是物块在传送带上的两种运行模式,分析可知,在传送带的长度一定时,把物块从A 运送到B 端的两种方式中,t0<t1结论是:如果能够保证物体在传送带上一路匀加速,那么物体到达右端所需的时间更短.例2、如图所示,一平直的传送带以速度v =2m/s 匀速运动,传送带把A 处的工件运送到B 处,A 、B 相距L =10m ,从A 处把工件无初速地放到传送带上,经过时间t =6s ,能传送到B 处,求: (1)工件在传送带上加速运动过程中的加速度大小及加速运动的时间; (2)欲用最短的时间把工件从A 处传送到B 处,求传送带的运行速度至少多大?【答案】(1)1m/s2 (2)52 【解析】对工件受力分析:对工件进行运动分析:假设工件从静止释放到与传送带共速共需要经历的时间为t速度关系:)1...(at v =代入得2=at t=2s 位移关系:,代入相关参数得:a=1m/s 2如果工件在传送带上一路匀加速刚好到达B 端时的速度为V ,且刚好与传送带共速,此时传送带的速度即为其临界的最小速度。
第2讲动量守恒定律及“三类模型”问题一、动量守恒定律1.内容如果一个系统不受外力,或者所受外力的矢量和为零,这个系统的总动量保持不变.2.表达式(1)p=p′,系统相互作用前总动量p等于相互作用后的总动量p′.(2)m1v1+m2v2=m1v1′+m2v2′,相互作用的两个物体组成的系统,作用前的动量和等于作用后的动量和.(3)Δp1=-Δp2,相互作用的两个物体动量的变化量等大反向.(4)Δp=0,系统总动量的增量为零.3.适用条件(1)理想守恒:不受外力或所受外力的合力为零.(2)近似守恒:系统内各物体间相互作用的内力远大于它所受到的外力.(3)某一方向守恒:如果系统在某一方向上所受外力的合力为零,则系统在这一方向上动量守恒.自测1关于系统动量守恒的条件,下列说法正确的是()A.只要系统内存在摩擦力,系统动量就不可能守恒B.只要系统中有一个物体具有加速度,系统动量就不守恒C.只要系统所受的合外力为零,系统动量就守恒D.系统中所有物体的加速度为零时,系统的总动量不一定守恒答案 C二、碰撞、反冲、爆炸1.碰撞(1)定义:相对运动的物体相遇时,在极短的时间内它们的运动状态发生显著变化,这个过程就可称为碰撞.(2)特点:作用时间极短,内力(相互碰撞力)远大于外力,总动量守恒.(3)碰撞分类①弹性碰撞:碰撞后系统的总动能没有损失.②非弹性碰撞:碰撞后系统的总动能有损失.③完全非弹性碰撞:碰撞后合为一体,机械能损失最大.2.反冲(1)定义:当物体的一部分以一定的速度离开物体时,剩余部分将获得一个反向冲量,这种现象叫反冲运动.(2)特点:系统内各物体间的相互作用的内力远大于系统受到的外力.实例:发射炮弹、爆竹爆炸、发射火箭等.(3)规律:遵从动量守恒定律.3.爆炸问题爆炸与碰撞类似,物体间的相互作用时间很短,作用力很大,且远大于系统所受的外力,所以系统动量守恒.自测2如图1所示,两滑块A、B在光滑水平面上沿同一直线相向运动,滑块A的质量为m,速度大小为2v0,方向向右,滑块B的质量为2m,速度大小为v0,方向向左,两滑块发生弹性碰撞后的运动状态是()图1A.A和B都向左运动B.A和B都向右运动C.A静止,B向右运动D.A向左运动,B向右运动答案 D解析以两滑块组成的系统为研究对象,两滑块碰撞过程动量守恒,由于初始状态系统的动量为零,所以碰撞后两滑块的动量之和也为零,所以A、B的运动方向相反或者两者都静止,而碰撞为弹性碰撞,碰撞后两滑块的速度不可能都为零,则A应该向左运动,B应该向右运动,选项D正确,A、B、C错误.命题点一动量守恒定律的理解和基本应用例1(多选)如图2所示,A、B两物体质量之比m A∶m B=3∶2,原来静止在平板小车C上,A、B间有一根被压缩的弹簧,地面光滑,当弹簧突然释放后,则()图2A.若A、B与平板车上表面间的动摩擦因数相同,A、B组成的系统的动量守恒B.若A、B与平板车上表面间的动摩擦因数相同,A、B、C组成的系统的动量守恒C.若A、B所受的摩擦力大小相等,A、B组成的系统的动量守恒D.若A、B所受的摩擦力大小相等,A、B、C组成的系统的动量守恒答案BCD解析如果A、B与平板车上表面的动摩擦因数相同,弹簧释放后,A、B分别相对小车向左、向右滑动,它们所受的滑动摩擦力F f A向右、F f B向左,由于m A∶m B=3∶2,所以F f A∶F f B =3∶2,则A、B组成的系统所受的外力之和不为零,故其动量不守恒,A选项错误;对A、B、C组成的系统,A、B与C间的摩擦力为内力,该系统所受的外力为竖直方向的重力和支持力,它们的合力为零,故该系统的动量守恒,与平板车间的动摩擦因数或摩擦力是否相等无关,故B、D选项正确;若A、B所受的摩擦力大小相等,则A、B组成的系统的外力之和为零,故其动量守恒,C选项正确.例2(2017·全国卷Ⅰ·14)将质量为1.00kg的模型火箭点火升空,50g燃烧的燃气以大小为600m/s的速度从火箭喷口在很短时间内喷出.在燃气喷出后的瞬间,火箭的动量大小为(喷出过程中重力和空气阻力可忽略)()A.30kg·m/sB.5.7×102 kg·m/sC.6.0×102kg·m/sD.6.3×102 kg·m/s答案 A解析设火箭的质量为m1,燃气的质量为m2.由题意可知,燃气的动量p2=m2v2=50×10-3×600kg·m/s=30 kg·m/s.以火箭运动的方向为正方向,根据动量守恒定律可得,0=m1v1-m2v2,则火箭的动量大小为p1=m1v1=m2v2=30kg·m/s,所以A正确,B、C、D错误.变式1 两磁铁各放在两辆小车上,小车能在水平面上无摩擦地沿同一直线运动.已知甲车和磁铁的总质量为0.5kg ,乙车和磁铁的总质量为1kg ,两磁铁的N 极相对.推动一下,使两车相向运动,某时刻甲的速率为2m /s ,乙的速率为3 m/s ,方向与甲相反,两车运动过程中始终未相碰.则: (1)两车最近时,乙的速度为多大? (2)甲车开始反向时,乙的速度为多大? 答案 (1)43m /s (2)2 m/s解析 (1)两车相距最近时,两车的速度相同,设该速度为v ,取刚开始运动时乙车的速度方向为正方向,由动量守恒定律得m 乙v 乙-m 甲v 甲=(m 甲+m 乙)v 所以两车最近时,乙车的速度为v =m 乙v 乙-m 甲v 甲m 甲+m 乙=1×3-0.5×20.5+1m/s =43m/s.(2)甲车开始反向时,其速度为0,设此时乙车的速度为v 乙′,取刚开始运动时乙车的速度方向为正方向,由动量守恒定律得 m 乙v 乙-m 甲v 甲=m 乙v 乙′ 解得v 乙′=2m/s命题点二 碰撞模型问题1.碰撞遵循的三条原则 (1)动量守恒定律 (2)机械能不增加E k1+E k2≥E k1′+E k2′或p 122m 1+p 222m 2≥p 1′22m 1+p 2′22m 2(3)速度要合理①同向碰撞:碰撞前,后面的物体速度大;碰撞后,前面的物体速度大(或相等). ②相向碰撞:碰撞后两物体的运动方向不可能都不改变. 2.弹性碰撞讨论 (1)碰后速度的求解 根据动量守恒和机械能守恒⎩⎪⎨⎪⎧m 1v 1+m 2v 2=m 1v 1′+m 2v 2′ ①12m 1v 12+12m 2v 22=12m 1v 1′2+12m 2v 2′2② 解得v 1′=(m 1-m 2)v 1+2m 2v 2m 1+m 2v 2′=(m 2-m 1)v 2+2m 1v 1m 1+m 2(2)分析讨论:当碰前物体2的速度不为零时,若m 1=m 2,则v 1′=v 2,v 2′=v 1,即两物体交换速度. 当碰前物体2的速度为零时,v 2=0,则: v 1′=(m 1-m 2)v 1m 1+m 2,v 2′=2m 1v 1m 1+m 2,①m 1=m 2时,v 1′=0,v 2′=v 1,碰撞后两物体交换速度. ②m 1>m 2时,v 1′>0,v 2′>0,碰撞后两物体沿同方向运动. ③m 1<m 2时,v 1′<0,v 2′>0,碰撞后质量小的物体被反弹回来.例3 (多选)两个小球A 、B 在光滑水平面上相向运动,已知它们的质量分别是m 1=4kg ,m 2=2kg ,A 的速度v 1=3m /s(设为正),B 的速度v 2=-3 m /s ,则它们发生正碰后,其速度可能分别是( ) A.均为1m /s B.+4 m/s 和-5m/s C.+2m /s 和-1 m/sD.-1m /s 和5 m/s答案 AD解析 由动量守恒,可验证四个选项都满足要求.再看动能情况E k =12m 1v 12+12m 2v 22=12×4×9J +12×2×9J =27JE k ′=12m 1v 1′2+12m 2v 2′2由于碰撞过程动能不可能增加,所以应有E k ≥E k ′,可排除选项B.选项C 虽满足E k ≥E k ′,但A 、B 沿同一直线相向运动,发生碰撞后各自仍能保持原来的速度方向(v A ′>0,v B ′<0),这显然是不符合实际的,因此C 错误.验证选项A 、D 均满足E k ≥E k ′,故答案为选项A(完全非弹性碰撞)和选项D(弹性碰撞).例4 (2016·全国卷Ⅲ·35(2))如图3所示,水平地面上有两个静止的小物块a 和b ,其连线与墙垂直;a 和b 相距l ,b 与墙之间也相距l ;a 的质量为m ,b 的质量为34m .两物块与地面间的动摩擦因数均相同.现使a 以初速度v 0向右滑动.此后a 与b 发生弹性碰撞,但b 没有与墙发生碰撞.重力加速度大小为g .求物块与地面间的动摩擦因数满足的条件.图3答案 32v 02113gl ≤μ<v 022gl解析 设物块与地面间的动摩擦因数为μ.若要物块a 、b 能够发生碰撞,应有12m v 02>μmgl ① 即μ<v 022gl②设在a 、b 发生弹性碰撞前的瞬间,a 的速度大小为v 1.由能量守恒定律得 12m v 02=12m v 12+μmgl③设在a 、b 碰撞后的瞬间,a 、b 的速度大小分别为v 1′、v 2′,以向右为正方向,由动量守恒和能量守恒有 m v 1=m v 1′+34m v 2′④ 12m v 12=12m v 1′2+12×34m v 2′2⑤联立④⑤式解得 v 2′=87v 1⑥由题意,b 没有与墙发生碰撞,由功能关系可知 12×34m v 2′2≤μ·3m 4gl ⑦联立③⑥⑦式,可得μ≥32v02113gl⑧联立②⑧式得,a与b发生弹性碰撞,但b没有与墙发生碰撞的条件为32v02 113gl≤μ<v022gl.变式2(2015·全国卷Ⅰ·35(2))如图4所示,在足够长的光滑水平面上,物体A、B、C位于同一直线上,A位于B、C之间.A的质量为m,B、C的质量都为M,三者均处于静止状态.现使A以某一速度向右运动,求m和M之间应满足什么条件,才能使A只与B、C各发生一次碰撞.设物体间的碰撞都是弹性的.图4答案 (5-2)M ≤m <M解析 设A 运动的初速度为v 0,A 向右运动与C 发生碰撞,以向右为正方向,由动量守恒定律得m v 0=m v 1+M v 2由机械能守恒定律得12m v 02=12m v 12+12M v 22可得v 1=m -M m +M v 0,v 2=2mm +Mv 0要使得A 与B 能发生碰撞,需要满足v 1<0,即m <M A 反向向左运动与B 发生碰撞过程,有 m v 1=m v 3+M v 4 12m v 12=12m v 32+12M v 42 整理可得v 3=m -M m +M v 1,v 4=2m m +Mv 1由于m <M ,所以A 还会向右运动,根据要求不发生第二次碰撞,需要满足v 3≤v 2 即2mm +M v 0≥M -m m +M v 1=(m -M m +M)2v 0 整理可得m 2+4Mm ≥M 2解方程可得m≥(5-2)M另一解m≤-(5+2)M舍去所以使A只与B、C各发生一次碰撞,须满足(5-2)M≤m<M拓展点1“滑块—弹簧”碰撞模型例5如图5所示,质量M=4kg的滑板B静止放在光滑水平面上,其右端固定一根水平轻质弹簧,弹簧的自由端C到滑板左端的距离L=0.5m,这段滑板与木块A(可视为质点)之间的动摩擦因数μ=0.2,而弹簧自由端C到弹簧固定端D所对应的滑板上表面光滑.木块A以速度v0=10m/s由滑板B左端开始沿滑板B上表面向右运动.已知木块A的质量m=1 kg,g取10 m/s2.求:图5(1)弹簧被压缩到最短时木块A的速度大小;(2)木块A压缩弹簧过程中弹簧的最大弹性势能.答案(1)2m/s(2)39J解析(1)弹簧被压缩到最短时,木块A与滑板B具有相同的速度,设为v,从木块A开始沿滑板B上表面向右运动至弹簧被压缩到最短的过程中,整体动量守恒,以向右为正方向,则m v0=(M+m)v解得v=mM+mv0代入数据得木块A的速度v=2m/s(2)在木块A压缩弹簧过程中,弹簧被压缩到最短时,弹簧的弹性势能最大,由能量关系知,最大弹性势能为E pm=12m v02-12(m+M)v2-μmgL代入数据得E pm=39J.拓展点2“滑块—平板”碰撞模型例6如图6所示,质量m1=0.3kg的小车静止在光滑的水平面上,车长L=1.5m,现有质量m2=0.2kg可视为质点的物块,以水平向右的速度v0=2m/s从左端滑上小车,最后在车面上某处与小车保持相对静止.物块与车面间的动摩擦因数μ=0.5,取g=10 m/s2,求:图6(1)物块与小车共同速度大小; (2)物块在车面上滑行的时间t ; (3)小车运动的位移大小x ;(4)要使物块不从小车右端滑出,物块滑上小车左端的速度v 0′不超过多少?答案 (1)0.8m /s (2)0.24 s (3)0.096 m (4)5 m/s解析 (1)设物块与小车共同速度为v ,以水平向右为正方向,根据动量守恒定律:m 2v 0=(m 1+m 2)v 解得v =0.8m/s(2)设物块与车面间的滑动摩擦力为F f ,对物块应用动量定理: -F f t =m 2v -m 2v 0 又F f =μm 2g 解得:t =v 0-vμg代入数据得t =0.24s(3)对小车应用动能定理:μm 2gx =12m 1v 2解得x =0.096m(4)要使物块恰好不从小车右端滑出,须使物块运动到小车右端时与小车有共同的速度,设其为v ′,以水平向右为正方向,则:m2v0′=(m1+m2)v′由系统能量守恒有:12=12(m1+m2)v′2+μm2gL2m2v0′代入数据解得v0′=5m/s故要使物块不从小车右端滑出,物块滑上小车左端的速度v0′不超过5m/s.拓展点3“滑块—斜面”碰撞模型例7(2016·全国卷Ⅱ·35(2))如图7所示,光滑冰面上静止放置一表面光滑的斜面体,斜面体右侧一蹲在滑板上的小孩和其面前的冰块均静止于冰面上.某时刻小孩将冰块以相对冰面3m/s的速度向斜面体推出,冰块平滑地滑上斜面体,在斜面体上上升的最大高度为h=0.3 m(h小于斜面体的高度).已知小孩与滑板的总质量为m1=30 kg,冰块的质量为m2=10 kg,小孩与滑板始终无相对运动.取重力加速度的大小g=10 m/s2.图7(1)求斜面体的质量;(2)通过计算判断,冰块与斜面体分离后能否追上小孩?答案(1)20kg(2)不能,理由见解析解析(1)规定向左为速度正方向.冰块在斜面体上上升到最大高度时两者达到共同速度,设此共同速度为v,斜面体的质量为m3.由水平方向动量守恒和机械能守恒定律得m2v0=(m2+m3)v ①12=12(m2+m3)v2+m2gh ②2m2v0式中v0=3m/s为冰块推出时的速度.联立①②式并代入题给数据得m3=20kg ③(2)设小孩推出冰块后的速度为v1,由动量守恒定律有m1v1+m2v0=0 ④代入数据得v1=-1m/s ⑤设冰块与斜面体分离后的速度分别为v2和v3,由动量守恒和机械能守恒定律有m2v0=m2v2+m3v3 ⑥12=12m2v22+12m3v32⑦2m2v0联立③⑥⑦式并代入数据得v 2=-1m/s⑧由于冰块与斜面体分离后的速度与小孩推出冰块后的速度相同且处在后方,故冰块不能追上小孩.命题点三 “人船模型”问题1.特点⎩⎪⎨⎪⎧(1)两个物体(2)动量守恒(3)总动量为零2.方程m 1v 1-m 2v 2=0(v 1、v 2为速度大小) 3.结论m 1x 1=m 2x 2(x 1、x 2为位移大小)例8长为L、质量为M的小船停在静水中,一个质量为m的人立在船头,若不计水的阻力和空气阻力,当人从船头走到船尾的过程中,船和人对地面的位移各是多少?答案见解析解析选人和船组成的系统为研究对象,因系统在水平方向不受力,所以动量守恒,人未走时系统的总动量为零.当人起步加速前进时,船同时加速后退;当人匀速前进时,船匀速后退;当人减速前进时,船减速后退;当人速度为零时,船速度也为零.设某时刻人对地的速率为v 1,船对地的速率为v 2,以人运动的方向为正方向,根据动量守恒定律得 m v 1-M v 2=0①因为在人从船头走到船尾的整个过程中时刻满足动量守恒,对①式两边同乘以Δt ,得 mx 1-Mx 2=0②②式为人对地的位移和船对地的位移关系.由图还可看出: x 1+x 2=L③联立②③两式得x 1=M M +m L ,x 2=mM +mL变式3如图8所示,质量为M的气球下挂着长为L的绳梯,一质量为m的人站在绳梯的下端,人和气球静止在空中,人从绳梯的下端往上爬到顶端时,人和气球相对于地面移动的距离分别是多少?(不计空气阻力)图8答案见解析解析由于人和气球组成的系统静止在空中,竖直方向系统所受外力之和为零即系统竖直方向总动量守恒.设某时刻人对地的速率为v1,气球对地的速率为v2,以人运动的方向为正方向,根据动量守恒定律得m v1-M v2=0 ①因为在人从绳梯的下端爬到顶端的整个过程中时刻满足动量守恒定律,对①式两边同乘以Δt,可得mx=My ②由题意知x+y=L ③联立②③得x=Mm+MLy=mm+ML即人相对于地面移动的距离是MM+mL.气球相对于地面移动的距离是mM+mL.命题点四“子弹打木块”模型问题1.木块放在光滑水平面上,子弹水平打进木块,系统所受的合外力为零,因此动量守恒.2.两者发生的相对位移为子弹射入的深度x相.3.根据能量守恒定律,系统损失的动能等于系统增加的内能.4.系统产生的内能Q=F f·x相,即两物体由于相对运动而摩擦产生的热(机械能转化为内能),等于摩擦力大小与两物体相对滑动的路程的乘积.5.当子弹速度很大时,可能射穿木块,这时末状态子弹和木块的速度大小不再相等,但穿透过程中系统的动量仍守恒,系统损失的动能为ΔE k=F f·L(L为木块的长度).例9 一质量为M 的木块放在光滑的水平面上,一质量为m 的子弹以初速度v 0水平打进木块并留在其中,设子弹与木块之间的相互作用力为F f .则:(1)子弹、木块相对静止时的速度是多少? (2)子弹在木块内运动的时间为多长?(3)子弹、木块相互作用过程中子弹、木块发生的位移以及子弹打进木块的深度分别是多少? (4)系统损失的机械能、系统增加的内能分别是多少? (5)要使子弹不射出木块,木块至少多长? 答案 (1)m M +m v 0 (2)Mm v 0F f (M +m )(3)Mm (M +2m )v 022F f (M +m )2 Mm 2v 022F f (M +m )2 Mm v 022F f (M +m )(4)Mm v 022(M +m ) Mm v 022(M +m ) (5)Mm v 022F f (M +m )解析 (1)设子弹、木块相对静止时的速度为v ,以子弹初速度的方向为正方向,由动量守恒定律得 m v 0=(M +m )v 解得v =mM +mv 0(2)设子弹在木块内运动的时间为t ,由动量定理得 对木块:F f t =M v -0 解得t =Mm v 0F f (M +m )(3)设子弹、木块发生的位移分别为x 1、x 2,如图所示,由动能定理得 对子弹:-F f x 1=12m v 2-12m v 02解得:x 1=Mm (M +2m )v 022F f (M +m )2对木块:F f x 2=12M v 2解得:x 2=Mm 2v 022F f (M +m )2子弹打进木块的深度等于相对位移,即x 相=x 1-x 2=Mm v 022F f (M +m )(4)系统损失的机械能为E 损=12m v 02-12(M +m )v 2=Mm v 022(M +m )系统增加的内能为Q =F f ·x 相=Mm v 022(M +m )系统增加的内能等于系统损失的机械能 (5)假设子弹恰好不射出木块,此时有 F f L =12m v 02-12(M +m )v 2解得L =Mm v 022F f (M +m )因此木块的长度至少为Mm v 022F f (M +m ).变式4(2018·青海平安模拟)如图9所示,质量为高三物理一轮复习31 2m 、长为L 的木块置于光滑水平面上,质量为m 的子弹以初速度v 0水平向右射向木块,穿过木块的过程中受到木块的恒定阻力为F f =5m v 0216L,试问子弹能否穿过木块?若能穿过,求出子弹穿过木块后两者的速度;若不能穿过,求出子弹打入木块后两者的速度.图9答案 见解析解析 设子弹能穿过木块,穿过木块后子弹的速度为v 1,木块的速度为v 2,以子弹初速度的方向为正方向,根据动量守恒定律得m v 0=m v 1+2m v 2① 根据能量守恒定律得5m v 0216L L =12m v 02-12m v 12-12×2m v 22 ②由①②式解得v 1=v 02或v 1=v 06将v 1=v 06代入①式,得v 2=512v 0>v 1(舍去) 将v 1=v 02代入①式,得v 2=14v 0<v 1 所以假设成立,即子弹能穿过木块,穿过木块后的速度为12v 0,木块的速度为14v 0.。
热点专题(二)第15讲动力学中的三种典型物理模型热点概述(1)本热点是动力学方法在三类典型模型问题中的应用,其中“等时圆”模型常在选择题中考查,而“滑块一木板”模型和“传送带”模型常以选择题或计算题的形式命题。
(2)通过本热点的学习,可以培养同学们的审题能力、建模能力、分析推理能力和规范表达能力等物理学科素养。
经过针对性的专题强化,通过题型特点和解题方法的分析,帮助同学们迅速提高解题能力。
(3)用到的相关知识有:匀变速直线运动规律、牛顿运动定律、相对运动的有关知识。
热点一“等时圆" 模型核心综述1.“等时圆”模型设想半径为R的竖直圆内有一条光滑直轨道,该轨道是一端与竖直直径相交的弦,倾角为0,—个物体从轨道顶端滑到底端,则下滑的加速度a = gsinO,位移兀二2Rsin0,而x = ,解得/二2\^,这也是沿竖直直径自由下落的时间。
总结:物体沿着位于同一竖直圆上的所有光滑细杆(或光滑斜面)由静止下滑,到达圆周的最低点(或从最高点到达同一圆周上各点)的时间相等,都等于物体沿直径做自由落体运动所用的时间。
2.三种典型情况(1) 质点从竖直圆上沿不同的光滑弦上端由静止开始滑到圆的最低点所用时间 相等,如图甲所示。
(2) 质点从竖直圆上最高点沿不同的光滑弦由静止开始滑到下端所用时间相 等,如图乙所示。
(3) 两个竖直圆相切且两圆的竖直直径均过切点,质点沿不同的过切点的光滑 弦从上端由静止开始滑到下端所用时间相等,如图丙所示。
典题示例如图所示,ah. c 〃是竖直平面内两根固定的光滑细杆,心b 、c 、〃位于同一 圆周上,方点为圆周的最低点,C 点为圆周的最高点,若每根杆上都套着一个小滑 环(图中未画岀),将两滑环同时从s c 处由静止释放,用门、"分别表示滑环从GA. t\ =t 2D ・无法确定 环的加速度为d 二笃严二gcosa,杆的长度为A - = Dcosa ,则根据x 二知2得,t = 手二晋,可见时间'只与圆的直径、当地的重力加速度有关, A 正确,B 、C 、D 错误。
专题三 动力学中的“传送带、板块”模型突破1 传送带模型考向1 水平传送带模型(2019·海口模拟)(多选)如图所示,水平传送带A 、B 两端相距s =3.5 m ,工件与传送带间的动摩擦因数μ=0.1.工件滑上A 端瞬时速度v A =4 m/s ,到达B 端的瞬时速度设为v B ,则(g 取10 m/s 2)( )A .若传送带不动,则vB =3 m/sB .若传送带以速度v =4 m/s 逆时针匀速转动,v B =3 m/sC .若传送带以速度v =2 m/s 顺时针匀速转动,v B =3 m/sD .若传送带以速度v =2 m/s 顺时针匀速转动,v B =2 m/s[审题指导] (1)若传送带顺时针转动且v 物>v 带,则传送带对物块的摩擦力为滑动摩擦力且为阻力.(2)若传送带逆时针转动,传送带对物块的摩擦力为滑动摩擦力且为阻力.【解析】 若传送带不动,由匀变速运动规律可知v 2B -v 2A =-2as ,a =μg ,代入数据解得vB =3 m/s ,当满足选项B 、C 、D 中的条件时,工件所受滑动摩擦力跟传送带不动时一样,还是向左,加速度还是μg ,所以工件到达B 端时的瞬时速度仍为3 m/s ,故选项A 、B 、C 正确,D 错误.【答案】 ABC分析传送带问题的关键是判断摩擦力的方向.要注意抓住两个关键时刻:一是初始时刻,根据物块相对传送带的运动方向确定摩擦力的方向,根据受力分析确定物块的运动;二是当物块的速度与传送带速度相等时,判断物块能否与传送带保持相对静止.另外注意考虑传送带长度——判定达到共同速度(临界点)之前物块是否脱离传送带.1.如图所示,足够长的水平传送带静止时在左侧某处画下标记点P ,将工件放在P 点.启动传送带,使其向右做匀加速运动,工件相对传送带发生滑动.经过t 1=2s 立即控制传送带,使其做匀减速运动,再经过t 2=3s 传送带停止运行,测得标记点P 通过的距离x 0=15 m.(1)求传送带的最大速度;(2)已知工件与传送带间的动摩擦因数μ=0.2,重力加速度g 取10 m/s 2,最大静摩擦力等于滑动摩擦力,求整个过程中工件运动的总距离.解析:(1)设传送带的最大速度为v m .根据匀变速直线运动规律,有x 0=x 1+x 2=v m2(t 1+t 2) 解得v m =6 m/s(2)以工件为研究对象,由牛顿第二定律,有μmg =ma 2 解得a 2=μg =2 m/s 2设经时间t 工件与传送带速度相等,有v =a 2tv =v m +a 1(t -t 1)传送带减速运动中的加速度a 1=0-v m t 2=-2 m/s 2解得t =2.5 s ,v =5 m/st =2.5 s 内工件的位移x 1=v2·t =6.25 m工件与传送带速度相等后,假设二者相对静止,则工件受到的合外力大小F 合=m ·|a 1|=m ×2 m/s 2工件与传送带之间的最大静摩擦力f m =μmg =m ×2 m/s 2因为F 合=f m ,所以二者一起减速运动到静止 减速过程工件的位移x 2=v2(t 1+t 2-t )=6.25 m故工件的总位移x =x 1+x 2=12.5 m 答案:(1)6 m/s (2)12.5 m 考向2 倾斜传送带模型上某位置轻轻放置一小木块,小木块与传送带间动摩擦因数为μ,小木块速度随时间变化关系如图乙所示,v 0、t 0已知,则( )A .传送带一定逆时针转动B .μ=tan θ+v 0gt 0cos θC .传送带的速度大于v 0D .t 0后木块的加速度为2g sin θ-v 0t 0【解析】 若传送带顺时针转动,当木块下滑时(mg sin θ>μmg cos θ),将一直匀加速到底端;当滑块上滑时(mg sin θ<μmg cos θ),先匀加速运动,在速度相等后将匀速运动,两种情况均不符合运动图象,故传送带是逆时针转动,选项A 正确.木块在0~t 0内,滑动摩擦力向下,木块匀加速下滑,a 1=g sin θ+μg cos θ,由图可知a 1=v 0t 0,则μ=v 0gt 0cos θ-tan θ,选项B 错误.当木块的速度等于传送带的速度时,木块所受的摩擦力变成斜向上,故传送带的速度等于v 0,选项C 错误.等速后的加速度a 2=g sin θ-μg cos θ,代入μ值得a 2=2g sin θ-v 0t 0,选项D 正确.【答案】 AD本题中在工件与传送带达到共同速度的瞬间摩擦力发生了“突变”,由向下的滑动摩擦力变为向上的滑动摩擦力.对于倾斜传送带,滑动摩擦力方向能否发生“突变”,还与动摩擦因数的大小有关.只有μ<tan θ时,才能突变为向上的滑动摩擦力;若μ>tan θ,则突变为静摩擦力.2.有一条沿顺时针方向匀速转动的传送带,恒定速度v =4 m/s ,传送带与水平面的夹角θ=37°,现将质量m =1 kg 的小物块轻放在其底端(小物块可视作质点),与此同时,给小物块沿传送带方向向上的恒力F =8 N ,经过一段时间,小物块上到了离地面高为h =2.4 m 的平台上.已知物块与传送带之间的动摩擦因数μ=0.5(g 取10 m/s 2,sin37°=0.6,cos37°=0.8).问:(1)物块从传送带底端运动到平台上所用的时间?(2)若在物块与传送带达到相同速度时,立即撤去恒力F ,计算小物块还需经过多少时间离开传送带以及离开时的速度?解析:(1)对物块受力分析可知,物块先是在恒力作用下沿传送带方向向上做初速度为零的匀加速运动,直至速度达到传送带的速度,由牛顿第二定律ma 1=F +μmg cos37°-mg sin37°,计算得a 1=6 m/s 2 加速时间t 1=v a 1=23 s加速距离x 1=v 22a 1=43m物块达到与传送带同速后,对物块受力分析发现,物块受的摩擦力的方向改变,因为F =8 N ,而下滑力和最大摩擦力之和为10 N .故不能相对斜面向上加速.故得a 2=0 匀速运动时间t 2=x -x 1v =23s 到平台所用的时间t =t 1+t 2=43s≈1.33 s(2)若达到同速后撤去力F ,因为mg sin37°>μmg cos37°,故减速上行,由牛顿第二定律可得ma 3=mg sin37°-μmg cos37°解得a 3=2 m/s 2物块还需t ′离开传送带,离开时的速度为v t ,则v 2-v 2t =2a 3x 2 v t =433m/s≈2.3 m/s t ′=v -v t a 3=2 s -233s≈0.85 s答案:(1)1.33 s (2)0.85 s突破2 板块模型1.模型特点涉及两个物体,并且物体间存在相对滑动.如图所示,质量为M 的长木板位于光滑水平面上,质量为m 的物块静止在粗糙的长木板上,为使两者能共同向右加速运动,可以采用以下两种方案:(1)水平恒力作用在物块m 上,其最大值为F ;(2)水平恒力作用在长木板M 上.重力加速度大小为g ,物块m 与长木板M 之间的最大静摩擦力等于两者之间的滑动摩擦力.则方案(2)中的水平恒力最大值为( )A.⎝ ⎛⎭⎪⎫1+m M FB.M m FC.⎝⎛⎭⎪⎫1+M mFD.m MF【解析】 对于方案(1),以物块m 为研究对象,根据牛顿第二定律有F -μmg =ma 1,以长木板M 为研究对象,根据牛顿第二定律有μmg =Ma 2,若两者出现相对滑动应有a 1≥a 2,联立解得F ≥μmg ⎝⎛⎭⎪⎫1+m M ;对于方案(2),以物块m 为研究对象,根据牛顿第二定律有μmg =ma 1′,以长木板为研究对象,根据牛顿第二定律有F ′-μmg =Ma 2′,若两者出现相对滑动应有a 1′≤a 2′,联立解得F ′≥μ(M +m )g .若取临界情况,则有F ′=M mF ,选项B 正确.【答案】 B3.(多选)如图所示,一质量为M 的斜面体静止在水平地面上,斜面倾角为θ,斜面上叠放着A 、B 两物体,物体B 在沿斜面向上的力F 的作用下沿斜面匀速上滑.若A 、B 之间的动摩擦因数为μ,μ<tan θ,A 、B 质量均为m ,重力加速度为g ,则( BD )A .A 、B 保持相对静止 B .A 、B 一定相对滑动C .B 与斜面间的动摩擦因数为F -mg sin θ2mg cos θD .B 与斜面间的动摩擦因数为F -mg sin θ-μmg cos θ2mg cos θ解析:因为μ<tan θ,对A 研究对象则满足mg sin θ>μmg cos θ,所以A 、B 一定相对滑动,选项A 错误,B 正确;选物体B 为研究对象,由牛顿第二定律得F -μmg cos θ-mg sin θ-μB ·2mg cos θ=0,μB =F -mg sin θ-μmg cos θ2mg cos θ,故选项C 错误,D 正确.4.(2019·湖北三校联考)有一项“快乐向前冲”的游戏可简化如下:如图所示,滑板长L =1 m ,起点A 到终点线B 的距离s =5 m .开始滑板静止,右端与A 平齐,滑板左端放一可视为质点的滑块,对滑块施一水平恒力F 使滑板前进.板右端到达B 处冲线,游戏结束.已知滑块与滑板间动摩擦因数μ=0.5,地面视为光滑,滑块质量m 1=2 kg ,滑板质量m 2=1 kg ,重力加速度g 取10 m/s 2,求:(1)滑板由A 滑到B 的最短时间;(2)为使滑板能以最短时间到达,水平恒力F 的取值范围.解析:(1)滑板一直加速时,所用时间最短.设滑板加速度为a 2,f =μm 1g =m 2a 2,a 2=10 m/s 2,s =a 2t 22,解得t =1 s.(2)刚好相对滑动时,水平恒力最小,设为F 1,此时可认为二者加速度相等,F 1-μm 1g =m 1a 2,解得F 1=30 N.当滑板运动到B 点,滑块刚好脱离时,水平恒力最大,设为F 2,设滑块加速度为a 1,F 2-μm 1g =m 1a 1,a 1t 22-a 2t 22=L ,解得F 2=34 N.则水平恒力大小范围是30 N≤F ≤34 N. 答案:(1)1 s (2)30 N≤F ≤34 N学习至此,请完成课时作业10。
专题6 动力学三大基本模型一、夯实基础1、传送带被广泛地应用于机场和火车站,如图所示为一水平传送带装置示意图,绷紧的传送带始终保持恒定的速率v运行,将行李无初速度地放在左端点A处。
传送带的水平部分A、B间的距离为L,则()A、行李在传送带上一定匀加速至B端B、行李在传送带上可能受到向右的静摩擦力C、行李在传送带上可能有一段时间不受摩擦力D、行李在传送带上的时间一定大于L v【答案】CD【解析】ABC.行李无初速地轻放在左端时,由于相对运动产生了水平向右的滑动摩擦力,行李在滑动摩擦力作用下做匀加速直线运动;如果当行李的速度等于传送带速度时,行李的位移小于传送带的长度,则行李与传送带相对静止做匀速直线运动,行李做匀速直线运动时不受摩擦力,故A、B错误,C正确;D.如果行李从开始一直做速度为v的匀速运动,则时间为Lv,但实际上行李从开始做初速度为0的匀加速直线运动,最大速度不大于v,则全程平均速度小于v,故行李在传送带上的时间一定大于Lv,故D正确;故选CD。
2、如图所示,足够长的传送带与水平面夹角为θ,以速度v0逆时针匀速转动。
在传送带的上端轻轻放置一个质量为m的小木块,小木块与传送带间的动摩擦因数μ<tan θ,则图中能客观地反映小木块的速度随时间变化关系的是( )【答案】: D【解析】:开始阶段,小木块受到竖直向下的重力和沿传送带向下的摩擦力作用,做加速度为a1的匀加速直线运动,由牛顿第二定律得mg sin θ+μmg cos θ=ma1,所以a1=g sin θ+μg cos θ。
小木块加速至与传送带速度相等时,由于μ<tan θ,则小木块不会与传送带保持相对静止而做匀速运动,之后小木块继续加速,所受滑动摩擦力变为沿传送带向上,做加速度为a2的匀加速直线运动,这一阶段由牛顿第二定律得mg sin θ-μmg cos θ=ma2,所以a2=g sin θ-μg cos θ。
根据以上分析,有a2<a1,所以,本题正确选项为D。
一轮复习《动力学的经典模型》学历案【设计者】樊玉【内容出处】人教版高中物理必修一第四章【课程标准】理解牛顿运动定律,用牛顿运动定律解释生活中的有关问题。
通过实验认识超重和失重现象。
【学习目标】1.通过对模型特征分析,掌握等时圆模型的特点及应用方法。
2.通过讨论水平和倾斜传送带的特点,掌握传送带模型问题的处理方法。
3.通过解决实例,掌握板块模型的处理方法。
【评价任务】1.完成活动一达成目标一,并完成评价1、2检测目标1的实现情况2.完成活动二达成目标二,并完成评价3、4检测目标2的实现情况3.完成活动三达成目标三,并完成评价5检测目标3的实现情况【学习过程】课堂探究:活动一等时圆模型模型特征(1)质点从竖直圆环上沿不同的光滑弦上端由静止开始滑到环的最低点所用时间相等,如图甲所示。
(2)质点从竖直圆环上最高点沿不同的光滑弦由静止开始滑到下端所用时间相等,如图乙所示。
(3)两个竖直圆环相切且两环的竖直直径均过切点,质点沿不同的光滑弦上端由静止开始滑到下端所用时间相等,如图丙所示。
评价1:如图所示,ab、cd是竖直平面内两根固定的光滑细杆,a、b、c、d位于同一圆周上,b点为圆周的最低点,c点为圆周的最高点,若每根杆上都套着一个小滑环(图中未画出),将两滑环同时从a、c处由静止释放,用t1、t2分别表示滑环从a到b、从c到d所用的时间,则()A.t1=t2B.t1>t2C.t1<t2D.无法确定评价2:如图所示,位于竖直平面内的圆周与水平面相切于M点,与竖直墙相切于A点,竖直墙上另一点B与M的连线和水平面的夹角为60°,C是圆环轨道的圆心。
已知在同一时刻,甲、乙两球分别从A、B两点由静止开始沿光滑倾斜直轨道运动到M点。
丙球由C点自由下落到M点。
则()A.甲球最先到达M点B.乙球最先到达M点C.丙球最先到达M点D.三个球同时到达M点活动二“传送带”模型1.水平传送带模型项目图示运动情况判断方法情景1可能一直加速,也可能先加速后匀速若v22μg≤l,物、带能共速情景2当v0>v时,可能一直减速,也可能先减速再匀速;当v0<v时,可能一直加速,也可能先加速再匀速若|v2-v20|2μg≤l,物、带能共速情景3传送带较短时,滑块一直减速达到左端;传送带较长时,滑块还要被传送带传回右端若v202μg≤l,物块能返回2.倾斜传送带模型1v2的小物块从与传送带等高的光滑水平地面上的A处滑上传送带。
第3节应用“三大力学观点”的三类典型模型学案突破一“滑块—弹簧”模型模型图示模型特点(1)两个或两个以上的物体与弹簧相互作用的过程中,若系统所受外力的矢量和为零,则系统动量守恒。
(2)在能量方面,由于弹簧形变会使弹性势能发生变化,系统的总动能将发生变化;若系统所受的外力和除弹簧弹力以外的内力不做功,系统机械能守恒。
(3)弹簧处于最长(最短)状态时两物体速度相等,弹性势能最大,系统动能通常最小(完全非弹性碰撞拓展模型)。
(4)弹簧恢复原长时,弹性势能为零,系统动能最大(弹性碰撞拓展模型,相当于碰撞结束时)[典例1]两物块A、B用轻弹簧相连,质量均为2 kg,初始时弹簧处于原长,A、B两物块都以v=6 m/s的速度在光滑的水平地面上运动,质量为4 kg的物块C静止在前方,如图所示,B与C碰撞后二者会粘连在一起运动。
则下列说法正确的是()A.B、C碰撞刚结束时的共同速度为3 m/sB.弹簧的弹性势能最大时,物块A的速度为3 m/sC.弹簧的弹性势能最大值为36 JD.弹簧再次恢复原长时A、B、C三物块速度相同[典例2]如图所示,A、B、C三个木块的质量均为m,置于光滑的水平面上,B、C之间有一轻质弹簧,弹簧的两端与木块接触但不固连,将弹簧压缩到不能再压缩时用细线把B、C紧连,使弹簧不能伸展,以至于B、C可视为一个整体。
现A以初速度v0沿B、C的连线方向朝B运动,与B相碰并黏合在一起。
以后细线突然断开,弹簧伸展,从而使C与A、B分离。
已知C离开弹簧后的速度恰为v0,求弹簧释放的势能。
思路点拨:解此题要注意以下关键信息:(1)“B、C可视为一个整体”表明A与B碰后,三者共速。
(2)“A与B碰后黏在一起”表明C离开弹簧时,A、B有共同的速度。
突破二“子弹打木块”模型模型图示模型特点(1)当子弹和木块的速度相等时木块的速度最大,两者的相对位移(子弹射入木块的深度)最大。
(2)系统的动量守恒,但机械能不守恒,摩擦力与两者相对位移的乘积等于系统减少的机械能。
专题3 动力学中的典型“模型”热点一滑块——长木板模型物理建模滑块——长木板模型是近几年来高考考查的热点,涉及摩擦力的分析判断、牛顿运动定律、匀变速运动等主干知识,能力要求较高.滑块和木板的位移关系、速度关系是解答滑块——木板模型的切入点,前一运动阶段的末速度则是下一运动阶段的初速度,解题过程中必须以地面为参考系.1.模型特点:滑块(视为质点)置于长木板上,滑块和木板均相对地面运动,且滑块和木板在摩擦力的相互作用下发生相对滑动.2.位移关系:滑块由木板一端运动到另一端过程中,滑块和木板同向运动时,位移之差Δx=x2-x1=L(板长);滑块和木板反向运动时,位移之和Δx=x2+x1=L.考向一外力F作用下的滑块——长木板1 (多选)[2020·大同一中、同煤一中联考] 如图Z31所示,光滑水平桌面上放置一长木板,长木板上表面粗糙,上面放置一小铁块,现有一水平向右的恒力F作用于铁块上,以下判断正确的是( )图Z31A.铁块与长木板都向右运动,且两者一定保持相对静止B.若水平力足够大,铁块与长木板间有可能发生相对滑动C.若两者保持相对静止,运动一段时间后,拉力突然反向,铁块与长木板间有可能发生相对滑动D.若两者保持相对静止,运动一段时间后,拉力突然反向,铁块与长木板间仍将保持相对静止(多选)[2020·宝鸡九校联考] 如图Z32所示,光滑水平面上放着质量为M的木板,木板左端有一个质量为m的木块.现对木块施加一个水平向右的恒力F,木块与木板由静止开始运动,经过时间t分离.下列说法正确的是( )图Z32A.若仅增大木板的质量M,则时间t增大B.若仅增大木块的质量m,则时间t增大C.若仅增大恒力F,则时间t增大D.若仅增大木块与木板间的动摩擦因数,则时间t增大考向二无外力F作用的滑块——长木板2 (多选)[2020·山西长治一模] 如图Z33所示,一足够长的木板静止在粗水平向右滑行,木板与滑块之间糙的水平面上,t=0时刻滑块从板的左端以速度v存在摩擦,且最大静摩擦力等于滑动摩擦力,则滑块的vt图像可能是图Z34中的( )图Z33A B C D图Z34[2020·保定二模] 如图Z35所示,光滑水平面上有一矩形长木板,木板左端放一小物块,已知木板质量大于物块质量,t=0时两者从图中位置以相同的水平速度v向右运动,碰到右面的竖直挡板后木板以与原来等大反向的速度被反弹回来,运动过程中物块一直未离开木板,则关于物块运动的速度v随时间t变化的图像可能正确的是( )图Z35A B C D图Z36考向三斜面上的滑块——长木板3 [2020·衡水联考] 如图Z37所示,一质量为M的斜面体静止在水平地面上,物体B受沿斜面向上力作用,沿斜面匀速上滑,A、B之间的动摩擦因数为μ,μ<tan θ且A、B质量均为m,则( )图Z37A.A、B保持相对静止B.地面对斜面体的摩擦力等于Fcos θC.地面受到的压力等于(M +2m)gD.B与斜面间的动摩擦因数为F-mgsin θ-μmg cos θ2mgcos θ■ 建模点拨“滑块——长木板模型”解题思路:1.选取研究对象:隔离滑块、木板,对滑块和木板进行受力分析和运动分析;2.寻找临界点:根据牛顿第二定律和直线运动规律求解加速度,判断是否存在速度相等的“临界点”,注意“临界点”摩擦力的突变;3.分析运动结果:无临界速度时,滑块与木板分离,确定相等时间内的位移关系解题;有临界速度时,滑块与木板不分离,假设速度相等后加速度相同,由整体法求解系统的共同加速度,再由隔离法用牛顿第二定律求滑块与木板间的摩擦力Ff,如果该摩擦力不大于最大静摩擦力说明假设成立,则整体列式解题;如果该摩擦力大于最大静摩擦力说明假设不成立,则分别列式;确定相等时间内的位移关系解题.考点二涉及传送带的动力学问题物理建模传送带问题为高中动力学问题中的难点,主要表现在两方面:其一,传送带问题往往存在多种可能结论的判定,即需要分析确定到底哪一种可能情况会发生;其二,决定因素多,包括滑块与传送带间的动摩擦因数大小、斜面倾角、传送带速度、传送方向、滑块初速度的大小及方向等.这就需要考生对传送带问题能做出准确的动力学过程分析.下面是最常见的几种传送带问题模型.考向一水平传送带模型情景图示滑块可能的运动情况情景1 (1)可能一直加速(2)可能先加速后匀速情景2 (1) v=v时,一直匀速(2) v>v时,可能一直减速,也可能先减速再匀速(3) v<v时,可能一直加速,也可能先加速再匀速情景3 (1)传送带较短时,滑块一直减速到达左端(2)传送带较长时,滑块还要被传送带传回右端.其中当v>v时,返回时速度为v,当v<v时,返回时速度为v4 [2020·哈三中一模] 水平方向的传送带,顺时针转动,传送带速度大小v =2 m/s不变,两端A、B间距离为3 m.一物块从B端以v=4 m/s滑上传送带,物块与传送带间的动摩擦因数μ=0.4,g取10 m/s2.物块从滑上传送带至离开传送带的过程中,速度随时间变化的图像是( )图Z38A B C D图Z39如图Z310所示,足够长的水平传送带静止时在左端做标记点P,将工件放在P点.启动传送带,P点向右做匀加速运动,工件相对传送带发生滑动.经过t1=2 s时立即控制传送带,P点做匀减速运动,再经过t2=3 s传送带停止运行,测得标记点P通过的距离x=15 m.(1)求传送带的最大速度;(2)已知工件与传送带的动摩擦因数μ=0.2,重力加速度g取10 m/s2,求整个过程中工件运动的总距离.图Z310考向二倾斜传送带模型情景图示滑块可能的运动情况情景1 (1)可能从左端滑下(2)可能静止(3)可能一直加速(4)可能先加速后匀速情景2 (1)可能一直加速(2)可能先加速后匀速(3)可能先以a1加速后以a2加速情景3 (1)可能一直加速(2)可能一直匀速(3)可能先加速后匀速(4)可能先减速后匀速(5)可能先以a1加速后以a2加速情景4 (1)可能一直加速(2)可能一直匀速(3)可能先减速后反向加速5 如图Z311甲所示,倾斜传送带倾角θ=37°,两端A、B间距离L=4 m,传送带以4 m/s的速度顺时针转动,一质量为1 kg的滑块从传送带顶端B点由静止释放下滑,到A时用时2 s,g取10 m/s2,sin 37°=0.6,cos 37°=0.8.(1)求滑块与传送带间的动摩擦因数;(2)若该滑块在传送带的底端A,现用一沿传送带斜面向上的大小为6 N的恒定拉力F拉滑块,使其由静止沿传送带向上运动,当速度与传送带速度相等时,撤去拉力,则当滑块到传送带顶端时,速度多大?图Z311如图Z312所示,传送带与水平面间的倾角为θ=37°,传送带以10 m/s的速率运行,在传送带上端A处无初速度地放上质量为0.5 kg的物体,它与传送带间的动摩擦因数为0.5,若传送带A到B的长度为16 m,则物体从A运动到B 的时间为多少?(g取10 m/s2,sin 37°=0.6,cos 37°=0.8.)图Z312■ 建模点拨(1)在确定研究对象并进行受力分析之后,首先判定摩擦力突变(含大小和方向)点,给运动分段.传送带传送的物体所受的摩擦力,不论是其大小的突变,还是其方向的突变,都发生在物体的速度与传送带速度相等的时刻.物体在传送带上运动时的极值问题,不论是极大值,还是极小值,也都发生在物体速度与传送带速度相等的时刻.v物与v传相等的时刻是运动分段的关键点,也是解题的突破口.(2)判定运动中的速度变化(即相对运动方向和对地速度变化)的关键是v物与v 传的大小与方向,对二者的比较是决定解题方向的关键.(3)在倾斜传送带上需比较mgsin θ与f的大小与方向,判断f的突变情况.(4)由传送带的长度判定到达临界状态之前物体是否滑出,还要判断物体与传送带共速以后物体是否一定与传送带保持相对静止.■ 高考真题1.[2020·四川卷] 如图Z313所示,水平传送带以速度v1匀速运动,小物体P、Q由通过定滑轮且不可伸长的轻绳相连,t=0时刻P在传送带左端具有速度v2,P与定滑轮间的绳水平,t=t时刻P离开传送带.不计定滑轮质量和滑轮与绳之间的摩擦,绳足够长.正确描述小物体P速度随时间变化的图像可能是( )图Z313A B C D图Z3142.[2020·全国卷Ⅱ] 下暴雨时,有时会发生山体滑坡或泥石流等地质灾害.某地有一倾角为θ=37°(sin 37°=35)的山坡C,上面有一质量为m的石板B,其上下表面与斜坡平行;B上有一碎石堆A(含有大量泥土),A和B均处于静止状态,如图Z315所示.假设某次暴雨中,A浸透雨水后总质量也为m(可视为质量不变的滑块),在极短时间内,A、B间的动摩擦因数μ1减小为38,B、C间的动摩擦因数μ2减小为0.5,A、B开始运动,此时刻为计时起点;在第2 s末,B的上表面突然变为光滑,μ2保持不变.已知A开始运动时,A离B下边缘的距离l=27 m,C足够长,设最大静摩擦力等于滑动摩擦力.取重力加速度大小g=10 m/s2.求:(1)在0~2 s时间内A和B加速度的大小;(2)A在B上总的运动时间.图Z315■ 模拟精选3.(多选)[2020·太原二模] 如图Z316所示,将小砝码置于桌面上的薄纸板上,用水平向右的拉力将纸板迅速抽出,砝码的移动很小.这就是大家熟悉的惯性演示实验.若砝码和纸板的质量分别为M和m.各接触面间的动摩擦因数均为μ,砝码与纸板左端的距离及桌面右端的距离均为 d.现用水平向右的恒定拉力F拉动纸板,下列说法正确的是( )图Z316A.纸板相对砝码运动时,纸板所受摩擦力的大小为μ(M+m)gB.要使纸板相对砝码运动,F一定大于2μ(M+m)gC.若砝码与纸板分离时的速度小于μgd,砝码不会从桌面上掉下D.当F=μ(2M+3m)g时,砝码恰好到达桌面边缘=1 kg的物块叠放在质量4.[2020·郑州一检] 如图Z317甲所示,质量为m1=3 kg的木板右端.木板足够长,放在光滑的水平地面上,木板与物块之间的为m2动摩擦因数为μ=0.2.整个系统开始时静止,重力加速度g取10 m/s2.1(1)在木板右端施加水平向右的拉力F,为使木板和物块发生相对运动,拉力F至少应为多大?(2)在0~4 s内,若拉力F的变化如图乙所示,2 s后木板进入μ2=0.25的粗糙水平面,在图丙中画出0~4 s内木板和物块的vt图像.(3)求0~4 s内物块相对木板的位移大小.甲乙丙图Z3175.[2020·黄冈中学模拟] 如图Z318所示,工厂利用倾角θ=30°的皮带传输机,依次将轻放在皮带底端每包质量为m=50 kg的货物从地面运送到高出水平地面的h=2.5 m平台上,传输机的皮带以v=1 m/s的速度顺时针转动且不打滑.已知货物与皮带间的动摩擦因数均为μ=2 35.若最大静摩擦力等于滑动摩擦力,g取10 m/s2.求:(1)每包货物从地面运送到平台上所用的时间t.(2)皮带传输机由电动机带动,每包货物从地面运送到平台上电动机需要多做的功.图Z318专题3 动力学中的典型“模型” 【热点题型探究】热点一 滑块——长木板模型例1 BD [解析] 设木板的质量为M ,小铁块的质量为m ,它们之间的最大静摩擦力为F f ,当铁块受到的摩擦力达到最大静摩擦力时,两者之间相对滑动,根据牛顿第二定律知,此时加速度a =F fm ,对木板和小铁块整体有,F =(M +m)a =(M +m )F f m ,则F>(M +m )F fm 时,两者发生相对滑动,选项A 错误,B 正确;若两者保持相对静止,则两者之间的摩擦力小于最大静摩擦力,当拉力反向时,两者摩擦力的大小不变,方向改变,仍然保持相对静止,选项C 错误,D 正确.变式题 BD [解析] 木块与木板相对滑动,滑动摩擦力F f =μF N =μmg,分别隔离木块与木板,根据牛顿第二定律得,F -μmg=ma 1,μmg=Ma 2,则a 1=Fm -μg ,a 2=μmg M ,分离条件是Δx =x 1-x 2=L ,又x 1=12a 1t 2,x 2=12a 2t 2,则t =2La 1-a 2;若仅增大木板的质量M ,木块加速度a 1不变,木板的加速度a 2减小,则时间t 减小,故选项A 错误;若仅增大木块的质量m ,则木块的加速度a 1减小,木板的加速度a 2增大,则t 变大,故选项B 正确;若仅增大恒力F ,则木块的加速度a 1变大,木板的加速度a 2不变,则t 变小,故选项C 错误;若仅增大木块与木板间的动摩擦因数,则木块的加速度a 1减小,木板的加速度a 2增大,则t 变大,故选项D 正确.例2 BD [解析] 开始时滑块相对木板向右运动,在木板水平向左的滑动摩擦力F f1作用下向右匀减速运动,木板则受到滑块的水平向右的滑动摩擦力F′f1和地面对其向左的摩擦力F f2作用,设木板与地面间的最大静摩擦力为F fm ,由于最大静摩擦力等于滑动摩擦力,因滑块与木板、木板与地面间的动摩擦因数未知,因此若F′f1≤F fm ,则F f2为静摩擦力,木板不动,滑块一直减速至停止,故选项D 正确;若F′f1>F fm ,则F f2为滑动摩擦力,木板向右加速运动,当滑块与木板具有共同速度时,滑块、木板相对静止,将一起向右做匀减速直线运动,根据牛顿第二定律可知,此时滑块运动的加速度将变小,故选项B正确,选项C错误;由于水平面粗糙、木板与滑块间存在摩擦,因此滑块不可能出现匀速运动的状态,故选项A错误.变式题 A [解析] 木板碰到挡板前,物块与木板一直做匀速运动,速度为v;木板碰到挡板后,物块在向左的滑动摩擦力作用下以初速度v向右做匀减速运动,木板向左减速运动,因物块与木板受到的滑动摩擦力大小相等,而物块的质量小,根据牛顿第二定律知物块的加速度大,所以物块速度先减至为零,之后反向加速,最终物块与木板达到共同速度一起匀速运动,相对滑动过程损失机械能,最终速度小于v.只有选项A可能正确.例3 D [解析] 由于μ<tan θ,所以A错误;由受力分析可知A沿斜面向下匀加速下滑,加速度aA=gsin θ-μg cos θ,将A、B及斜面体视为整体,受力分析可知地面对斜面体的摩擦力等于f=m(gsin θ-μg cos θ)cos θ+Fcos θ,地面受到的压力为FN=(M+2m)g-Fsin θ-m(gsin θ-μgcos θ)sin θ,故B、C错误,D正确.考点二涉及传送带的动力学问题例 4 B [解析] 物块在向右的滑动摩擦力作用下先向左做减速运动,加速度大小a=μg=4 m/s2,经过t1=va=1 s速度减小到零,此时向左运动的位移x1=v2t1=2 m<3 m,没到达左端A,因此接着在向右的滑动摩擦力作用下向右加速运动,加速度不变,经t2=va=0.5 s速度达到2 m/s,与传送带的速度相等,向右运动的位移x2=v2t2=0.5 m,此时物块与B端的距离为x1-x2=1.5 m,最后物块与传送带一起向右匀速运动,因此B图像正确.[点评] 分析传送带问题的关键是判断摩擦力的方向.要注意抓住两个关键时刻:一是初始时刻,根据物块相对传送带的运动方向确定摩擦力的方向,根据受力分析确定物块的运动;二是当物块的速度与传送带速度相等时,判断物块能否与传送带保持相对静止.另外注意考虑传送带长度——判定达到共同速度(临界点)之前物块是否脱离传送带.变式题(1)6 m/s (2)12.5 m[解析] (1)设传送带的最大速度为vm根据匀变速直线运动规律x 0=x1+x2=vm2(t1+t2)代入数据解得vm=6 m/s传送带减速运动中a1=0-vmt2=-2 m/s2(2)以工件为研究对象,由牛顿第二定律:μmg=ma2解得工件的加速度a2=μg=2 m/s2设经时间t工件与传送带速度v相等v=a2tv=vm +a1(t-t1)解得t=2.5 s,v=5 m/st=2.5 s内工件的位移x1=v2·t=6.25 m工件与传送带速度v相等后,设二者相对静止则工件受到的摩擦力大小Ff =m·|a1|=m×2 m/s2工件与传送带之间的最大静摩擦力F fm =μmg=m×2 m/s2=Ff所以二者一起减速运动到静止减速过程工件的位移x2=v2(t1+t2-t)=6.25 m解得工件的位移x=x1+x2=12.5 m例5 (1)0.5 (2)2 2 m/s[解析] (1)滑块从B点下滑的过程中mgsin θ-μmg cos θ=ma1L=12a1t21求得a1=2 m/s2,μ=0.5(2)当用拉力F拉滑块时F+μmg cos θ-mgsin θ=ma2求得a2=4 m/s2当滑块的速度与传送带速度相等时,滑块运动的位移x 1=v22a2=2 m撤去拉力后,滑块开始向上做匀减速运动,加速度大小等于a1,向上运动的位移大小为x2=L-x1=2 m则v2-v2B =2a1x2求得vB=2 2 m/s[点评] 解答倾斜传送带问题,应注意物块与传送带达到共同速度时,分析重力沿传送带的分力与滑动摩擦力(最大静摩擦力)的合力是否满足一起运动的条件.变式题传送带顺时针运行时用时2 s 传送带逆时针运行时用时4 s[解析] (1)当传送带以10 m/s的速度顺时针运行时,物体所受滑动摩擦力沿传送带向下物体受力分析如图中甲所示根据牛顿第二定律mgsin θ+μmg cos θ=ma 1解得加速度a 1=gsin θ+μg cos θ=10 m/s 2 方向沿传送带向下物体达到与传送带相同的速度所需时间t 1=va 1=1 s在t 1内物体沿传送带对地位移x 1=12a 1t 21=5 m从t 1开始物体所受滑动摩擦力沿传送带向上 物体受力分析如图中乙所示 根据牛顿第二定律mgsin θ-μmg cos θ=ma 2 物体对地加速度a 2=gsin θ-μg cos θ=2 m/s 2 方向沿传送带向下物体以加速度a 2运动的位移x 2=L -x 1=11 m 由x 2=vt 2+12a 2t 22解得运行x 2=11 m 所需时间t 2=1 s(t 2′=-11 s 舍去) 所需总时间t =t 1+t 2=2 s(2)当传送带以10 m/s 速度逆时针运行时,物体所受滑动摩擦力方向沿传送带向上根据牛顿第二定律mgsin θ-μmg cos θ=ma 3 解得加速度a 3=2 m/s 2 由x =L =12a 3t ′2解得物体从A运动到B所需时间t′=2xa3=2La3=4 s【高考模拟演练】1.BC [解析] 若P在传送带左端时的速度v2小于v1,则P受到向右的摩擦力,当P受到的摩擦力大于绳的拉力时,P做加速运动,则有两种可能:第一种是一直做加速运动,第二种是先做加速运动,当速度达到v1后做匀速运动,所以B正确;当P受到的摩擦力小于绳的拉力时,P做减速运动,也有两种可能:第一种是一直做减速运动,从右端滑出;第二种是先做减速运动再做反向加速运动,从左端滑出.若P在传送带左端具有的速度v2大于v1,则小物体P受到向左的摩擦力,使P做减速运动,则有三种可能:第一种是一直做减速运动,第二种是速度先减到v1,之后若P受到绳的拉力和静摩擦力作用而处于平衡状态,则其以速度v1做匀速运动,第三种是速度先减到v1,之后若P所受的静摩擦力小于绳的拉力,则P将继续减速直到速度减为0,再反向做加速运动并且摩擦力反向,加速度不变,从左端滑出,所以C正确.2.(1)3 m/s2 1 m/s2(2)4 s[解析] (1)在0~2 s时间内,A和B的受力如图所示,其中f1、N1是A与B之间的摩擦力和正压力的大小,f2、N2是B与C之间的摩擦力和正压力的大小,方向如图所示.由滑动摩擦力公式和力的平衡条件得f 1=μ1N1①N1=mgcos θ②f 2=μ2N2③N 2=N1+mgcos θ④规定沿斜面向下为正.设A和B的加速度分别为a1和a2,由牛顿第二定律得mgsin θ-f1=ma1⑤mgsin θ-f 2+f 1=ma 2⑥联立①②③④⑤⑥式,并代入题给条件得 a 1=3 m/s 2⑦ a 2=1 m/s 2⑧(2)在t 1=2 s 时,设A 和B 的速度分别为v 1和v 2,则 v 1=a 1t 1=6 m/s ⑨ v 2=a 2t 1=2 m/s ⑩t >t 1时,设A 和B 的加速度分别为a 1′和a 2′,此时A 与B 之间摩擦力为零,同理可得a 1′=6 m/s 2⑪ a 2′=-2 m/s 2⑫即B 做减速运动.设经过时间t 2,B 的速度减为零,则有 v 2+a 2′t 2=0⑬联立⑩⑫⑬式得t 2=1 s ⑭在t 1+t 2时间内,A 相对于B 运动的距离为s =⎝ ⎛⎭⎪⎫12a 1t 21+v 1t 2+12a 1′t 22-⎝ ⎛⎭⎪⎫12a 2t 21+v 2t 2+12a 2′t 22=12 m<27 m ⑮此后B 静止不动,A 继续在B 上滑动,设再经过时间t 3后A 离开B ,则有 l -s =(v 1+a 1′t 2)t 3+12a 1′t 23⑯可得 t 3=1 s(另一解不合题意,舍去)⑰ 设A 在B 上总的运动时间为t 总,有 t 总=t 1+t 2+t 3=4 s ⑱(利用下面的速度图像求解,正确的,参照上述答案及评分参考给分)3.BC [解析] 纸板相对砝码运动时,纸板受桌面的摩擦力为μ(M+m)g ,受砝码的摩擦力为μMg,即摩擦力为μ(2M +m)g ,要使纸板相对砝码运动,纸板的加速度a 1=F -μ(2M +m )g m >a 2=μMgM ,则F>2μ(M+m)g ,选项A 错误,B 正确;若砝码与纸板分离时的速度v <μgd ,则砝码匀加速运动的位移s 1=v 22μg <d2,匀减速运动的位移s 2=v 22μg <d2,则总位移小于d ,不会从桌面掉下,C 正确;当F =μ(2M+3m)g 时,a 1=2μg,a =μg,经分析计算可知当砝码与纸板分离时,砝码到达桌面边缘且仍有速度,故砝码一定从桌面上掉下,D 错误.4.(1)8 N (2)如图所示 (3)1 m[解析] (1)把物块和木板看作整体,由牛顿第二定律得 F =(m 1+m 2)a物块与木板将要相对滑动时μ1m 1g =m 1a 联立解得F =μ1(m 1+m 2)g =8 N(2)物块在0~2 s 内做匀加速直线运动,μ1m 1g =m 1a 1 木板在0~1 s 内做匀加速直线运动,F 1-μ1m 1g =m 2a 2 在1~2 s 内F 2=μ1m 1g ,木板做匀速运动 撤去F 后物块做匀减速直线运动,-μ1m 1g =m 1a 3 木板做匀减速直线运动,-μ2(m 1+m 2)g +μ1m 1g =m 2a 4 二者在整个运动过程的vt 图像如图所示(3)0~2 s内物块相对木板向左运动Δx1=12a2t21+(a2t1)t2-12a1(t1+t2)22~4 s内物块相对木板向右运动Δx2=-[a1(t1+t2)]22a3--(a2t1)22a40~4 s内物块相对木板的位移大小Δx=Δx1-Δx2=1 m5.(1)5.5 s (2) 1425 J[解析] (1)设货物加速运动的加速度为a、时间为t1、位移为x1,则:根据牛顿第二定律μmgcos θ-mgsin θ=ma解得货物加速运动的加速度a=1 m/s2加速运动的时间t1=va=1 s加速运动的位移x1=12at21=0.5 m最大静摩擦力等于滑动摩擦力Ff=μmg cos θ=0.6mg>mgsin θ达到共同速度后一起向上匀速运动货物匀速运动时间t2=hsin θ-x1v=4.5 s则货物从地面运送到平台上所用的时间t=t1+t2=5.5 s(2)货物加速运动过程中,传送带的位移x 2=vt1=1 m相对位移Δx=x2-x1=0.5 m根据能量守恒定律ΔW=μmg cos θ·Δx+mgh+12 mv2解得ΔW=1425 J。
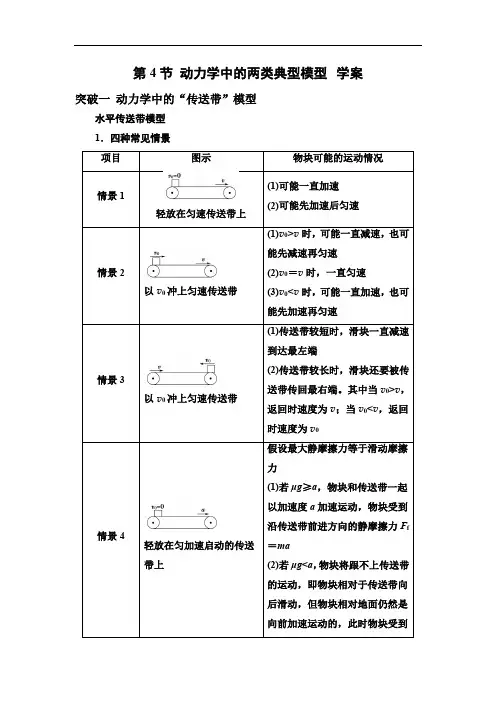
第4节动力学中的两类典型模型学案突破一动力学中的“传送带”模型水平传送带模型1.四种常见情景项目图示物块可能的运动情况情景1轻放在匀速传送带上(1)可能一直加速(2)可能先加速后匀速情景2以v0冲上匀速传送带(1)v0>v时,可能一直减速,也可能先减速再匀速(2)v0=v时,一直匀速(3)v0<v时,可能一直加速,也可能先加速再匀速情景3以v0冲上匀速传送带(1)传送带较短时,滑块一直减速到达最左端(2)传送带较长时,滑块还要被传送带传回最右端。
其中当v0>v,返回时速度为v;当v0<v,返回时速度为v0情景4轻放在匀加速启动的传送带上假设最大静摩擦力等于滑动摩擦力(1)若μg≥a,物块和传送带一起以加速度a加速运动,物块受到沿传送带前进方向的静摩擦力F f =ma(2)若μg<a,物块将跟不上传送带的运动,即物块相对于传送带向后滑动,但物块相对地面仍然是向前加速运动的,此时物块受到沿传送带前进方向的滑动摩擦力F f=μmg,产生的加速度a′=μg(1)在匀速运动的水平传送带上,只要物体和传送带不共速,物体就会在滑动摩擦力的作用下,朝着和传送带共速的方向变速,直到共速,滑动摩擦力消失,与传送带一起匀速运动,或由于传送带不是足够长,在匀加速或匀减速过程中始终没达到共速。
(2)计算物体与传送带间的相对路程要分两种情况:①若二者同向,则Δs=|s传-s物|;②若二者反向,则Δs=|s传|+|s物|。
[典例1]如图所示为车站使用的水平传送带模型,其A、B两端的距离L =8 m,它与水平台面平滑连接。
现有一物块以v0=10 m/s的初速度从A端水平地滑上传送带。
已知物块与传送带间的动摩擦因数为μ=0.6,g取10 m/s2。
求:(1)若传送带保持静止,物块滑到B端时的速度大小;(2)若传送带顺时针匀速转动的速率恒为12 m/s,物块到达B端时的速度大小;(3)若传送带逆时针匀速转动的速率恒为4 m/s,且物块初速度变为v′0=6 m/s,仍从A端滑上传送带,物块从滑上传送带到离开传送带的总时间。
【关键字】物理10 动力学中常见的“三个物理模型”一、选择题(1~3题只有一个选项符合题目要求,4~5题有多个选项符合题目要求)1.如图所示,位于竖直平面内的固定光滑圆环轨道与水平面相切于M点,与竖直墙相切于A点.竖直墙上另一点B与M的连线和水平面的夹角为60°,C是圆环轨道的圆心.已知在同一时刻a、b两球分别为由A、B两点从静止开始沿光滑倾斜直轨道AM、BM运动到M 点;c球由C点自由下落到M点.则( )A.a球最先到达M点B.b球最先到达M点C.c球最先到达M点D.b球和c球都可能最先到达M点2.如图所示,在光滑水平面上有一质量为m1的足够长的木板,其上叠放一质量为m2的木块.假定木块和木板之间的最大静摩揩力和滑动摩揩力相等,现给木块施加一随时间t 增大的水平力F=kt(k是常数),木块和木板加速度的大小分别为a1和a2,关于a1和a2变化的图线中正确的是( )3.如图甲所示,足够长的传送带与水平面夹角为θ,以速度v0逆时针匀速转动.在传送带的上端轻轻放置一个质量为m的小木块,小木块与传送带间的动摩揩因数μ<tanθ,则图乙中能客观地反映小木块的速度随时间变化关系的是( )4.如图所示,一质量为M的斜面体静止在水平面上,物体B受沿斜面向上力F作用沿斜面匀速上滑,A、B之间动摩揩因数为μ,μ<tanθ,且质量均为m,则( ) A.A、B保持相对静止B.地面对斜面体的摩揩力等于mg(sinθ-μcosθ)cosθ+FcosθC.地面受到的压力等于(M+)gD.B与斜面间动摩揩因数为5.如图所示,水平传送带两边分别是与传送带等高的光滑水平地面A、B,初速度大小为v1的小物块从与传送带相接的地面A滑上传送带,当绷紧的水平传送带处于静止状态时,小物块恰好可以运动到传送带的中点,如果传送带以恒定速率v2(v2=2v1)运行,若从小物块滑上传送带开始计时,则小物块运动的v-t图象(以地面为参考系)可能是( )二、非选择题6.如图所示,质量均为m的木块A和木块B叠放在水平桌面上,A光滑且位于B的最右端,B与地面间的动摩揩因数为μ,水平力F=mg作用在B上,A、B以/s的共同速度沿水平面向右匀速运动,0.2 s后F加倍(g=/s2)(1)试求μ的值;(2)若B足够长,求0.4 s时A、B的速度,并在乙图中作出0.2~0.4 s A、B运动的v -t图象.7.如图所示,与水平面成θ=30°的传送带正以v=/s的速度匀速运行,A、B两端相距l=.现每隔1 s把质量m=的工件(视为质点)轻放在传送带上,工件在传送带的带动下向上运动,工件与传送带间的动摩揩因数μ=,取g=/s2,结果保留两位有效数字.求:(1)相邻工件间的最小距离和最大距离;(2)满载与空载相比,传送带需要增加多大的牵引力?答案1C 2A 3D 4BD 5AD6(1)在0~0.2 s内A、B做匀速直线运动,分析B,根据平衡条件有:F=2μmg,又F=mg,代入数据解得μ=0.5.(2)0.2~0.4 s,A运动状态不变(vA=/s),继续做匀速直线运动,B做匀加速运动,根据牛顿第二定律得,-2μmg=ma,代入数据解得a=/s2.0.4 s时B的速度v=v0+at=/s+10×/s=/s,A、B两物体的v-t图象如右图所示.7(1)设工件在传送带上加速运动时的加速度为a,则μmgcosθ-mgsinθ=ma代入数据解得a=/s2刚放上下一个工件时,该工件离前一个工件的距离最小,且最小距离dmin=at2解得dmin=当工件匀速运动时两相邻工件相距最远,则dmax=vt=.(2)由于工件加速时间为t1==3.0 s,因此传送带上总有三个(n1=3)工件正在加速,故所有做加速运动的工件对传送带的总滑动摩揩力Ff1=3μmgcosθ在滑动摩揩力作用下工件移动的位移x==传送带上匀速运动的工件数n2==3当工件与传送带相对静止后,每个工件受到的静摩揩力Ff0=mgsinθ,所有做匀速运动的工件对传送带的总静摩揩力Ff2=n2Ff0与空载相比,传送带需增大的牵引力F=Ff1+Ff2联立解得F=33 N此文档是由网络收集并进行重新排版整理.word可编辑版本!。
专题7.2、动力学之三大基本模型题型一、过程分析之板块模型由滑块和木板组成的相互作用的系统一般称之为“木板—滑块模型”,简称'板块模型'。
此类问题涉及的相关知识点包括:静摩擦力、滑动摩擦力、运动学规律、牛顿运动定律、动能定理、能量转化与守恒等多方面的知识。
此类问题涉及的处理手段包括:受力分析、运动分析、临界条件判断、图像法处理、多过程研究等多种方法。
因此对大家的综合分析能力要求极高,也是高考的热点之一。
“滑块——木板”模型【解题方略】两种类型如下:例1、如图所示,质量为M=8kg的小车放在光滑的水平面上,在小车左端加一水平推力F=8N,当小车向右运动的速度达到v0=1.5m/s时,在小车前端轻轻放上一个大小不计、质量为m=2kg的小物块,物块与小车间的动摩擦因数μ=0.2。
已知运动过程中,小物块没有从小车上掉下来,取g=10m/s2。
求:(1)经过多长时间两者达到相同的速度;(2)小车至少多长,才能保证小物块不从小车上掉下来;(3)当小车与物块达到共速后在小车合物块之间是否存在摩擦力?(4)从小物块放上小车开始,经过t=1.5s小物块通过的位移大小为多少;(5)二者共速后如果将推力F 增大到28N ,则二者的加速度大小分别为;【答案】(1)1s.(2)0.75m. (3)有,1.6N .(4)2.1m (5)2m/s2. 8m/s2【解析】对木块受力分析得:对小车受力分析得:解得:分别对两车进行运动分析:假设经过时间t两车达到共速,且达到共速时物块恰好到达木板的左端;对物块:对小车:根据题意:联立1、2、3、4、5、6式得:t=1s, l=0.75,v共=2m/s(3)当物块与小车共速后对整体受力分析:此时小车与物块之间的摩擦力转化为静摩擦力,隔离物块对物块受力分析得:。
所以当二者共速后在小车物块之间存在静摩擦力大小为:1.6N .(4)二者共速后将以0.8m/s2的加速度继续前进,所以在1.5s内物块经历了两段运动(0-1s与1-1.5s),对物块进行运动分析得:代入参数得:,mx1.2(5)当外力F增加到28N 时,需要先判断,物块与小车之间是否发生相对运动是处理该问的关键;设:当外力F增大到F0时。
小车与物块之间刚好发生相对运动,此时AB之间的静摩擦力达到最大值;结合叠加体临界问题的求解方法(见专题06)可得:代入相关参数联立:9、10、11关系式可得:所以当F 增大到等于28N 时小车与物块之间将发生相对运动; 对物块受力分析得:对小车受力分析得:方法总结:选用整体法和隔离法的策略(1)当各物体的运动状态相同时,宜选用整体法;当各物体的运动状态不同时,宜选用隔离法。
(2)对较复杂的问题,通常需要多次选取研究对象,交替应用整体法与隔离法才能求解。
技巧秘诀应用整体法、隔离法应注意的三个问题(1)实际问题通常需要交叉应用隔离法与整体法才能求解。
(2)对于两个以上的物体叠加组成的物体系统,在进行受力分析时,一般先从受力最简单的物体入手,采用隔离法进行分析。
(3)将整体作为研究对象时,物体间的内力不能列入牛顿第二定律方程中。
例2、【2015新课标II-25】25.(20分)下暴雨时,有时会发生山体滑坡或泥石流等地质灾害。
某地有一倾角为θ=37°的山坡C ,上面有一质量为m 的石板B ,其上下表面与斜坡平行;B 上有一碎石堆A (含有大量泥土),A 和B 均处于静止状态,如图所示。
假设某次暴雨中,A 浸透雨水后总质量也为m (可视为质量不变的滑块),在极短时间内,A 、B 间的动摩擦因数μ1减小为83,B 、C 间的动摩擦因数μ2减小为0.5,A 、B 开始运动,此时刻为计时起点;在第2s 末,B 的上表面突然变为光滑,μ2保持不变。
已知A 开始运动时,A 离B 下边缘的距离l=27m ,C 足够长,设最大静摩擦力等于滑动摩擦力。
取重力加速度大小g=10m/s2。
求:(1)在0~2s 时间内A 和B 加速度的大小 (2)A 在B 上总的运动时间【答案】3m/s2 1m/s2 4s【解析】选择0-2s作为研究过程,对物体进行受力分析;对A受力分析:对B 受力分析:解得:选择0-2s作为研究过程对物体进行运动分析:设2s末A的速度大小为V1,B 的速度大小为V2,在该段时间里A 走的位移大小为X1,B走的位移大小为X2;联立4、5、6、7得:选择2s以后作为研究过程对物体进行受力分析:对A 受力分析:对B 受力分析:解得:设经过时间t,B物体停止,此时A 的速度大小为v3,在该时间里A 走的位移大小为x3,B 走的位移大小为x4;对A:对B:对A :对B :解得:x 走完剩余位移所用的时间为t、;选择3s以后作为研究过程:设剩余位移的大小为3对A :故A在B上运动的总时间为t=2+1+1=4s (18)例3、(2015·新课标全国Ⅰ,25)一长木板置于粗糙水平地面上,木板左端放置一小物块;在木板右方有一墙壁,木板右端与墙壁的距离为4.5 m,如图(a)所示。
t=0时刻开始,小物块与木板一起以共同速度向右运动,直至t=1 s时木板与墙壁碰撞(碰撞时间极短)。
碰撞前、后木板速度大小不变,方向相反;运动过程中小物块始终未离开木板。
已知碰撞后1 s时间内小物块的v-t图线如图(b)所示。
木板的质量是小物块质量的15倍,重力加速度大小g取10 m/s2。
求:(1)木板与地面间的动摩擦因数μ1及小物块与木板间的动摩擦因数μ2;(2)木板的最小长度;(3)木板右端离墙壁的最终距离。
【答案】(1)μ2=0.4,μ1=0.1(2)6m(3)6.5m【解析】选择0-1s作为研究过程对整体分析得:设0-1s内整体的位移大小为x0,所以有;联立1、2、3可得:0.11=μ选择1-2s 作为研究过程分别对AB 进行受力分析和运动分析 对A 进行受力分析:对B 进行受力分析:对AB 进行运动分析;设1-2s 末A 的位移为x 1B 的位移为x 2,2s 末A 、B 的速度大小分别为v 1,v 2;联立5、6、7式得:将0.11=μ代入可得:0.42=μ (8)联立将a1、a2代入联立9、10、11、12式可得:22/38s m v = ...21m x = ...3102m x = m x 3161=∆选择2s 以后作为研究过程;对AB 分别进行受力分析,两物体各自的加速度大小未变。
对AB 进行运动分析,设经过时间t2两物体共速,共速的速度大小为v 共,该过程AB 两物体各自产生的位移分别为x3、x4;解得:联立:14、15、16、17得:选择2.5s以后作为研究过程;AB 以共同大小的加速度a,以v共为初速度做匀减速运动,设经过时间t3停止;X=6.5m (21)方法总结:处理多体多过程问题的基本步骤:1、确定物体的运动过程并分段处理;将复杂的运动过程分解成若干个小的过程进行研究。
2、在已经选好的研究过程中根据不同的运动状态选择合理的研究对象;3、根据题中的关键条件,对物体进行受力分析和运动分析,书写各过程的力学关系式,以及运动学关系式,求未知物理量。
4、注意如果是连续分段的思维切记过程的衔接;技巧秘诀分析滑块-木板模型时要抓住一个转折和两个关联。
题型二、过程分析之传送带模型一、水平传送带模型例4、如图所示,传送带AB 之间的距离为L,传送带以速度v 匀速转动,物块与传送带之间的摩擦因素为u ,将物块从A 点由静止释放,求物体从A 传到B 的时间;【答案】g v v l μ2+或gl μ2 【解析】物块在传送带上可能经历两种运动形式,如果传送带足够长物块先匀加速到与传送带共速,然后再匀速的走完剩余的全程,如果传送带不是足够长,则物块在传送带上一直匀加速; 方式一:物块先匀加速再匀速; 对物块受力分析:设物块从开始加速到与传送带共速需要的时间为t1,从共速到走完剩余全程需要的时间为t2; 阶段一速度关系式:10at v +=...)(11gvt μ=; 阶段一位移关系式:阶段二速度关系式:)3(22vx t =阶段二位移关系式:求得:所以从AB 传送到B 的总时间为:方式二、物块在传送带上一直匀加速到另一端; 对物块受力分析:对物体进行运动分析,如果传送带不是足够长,物块在传送带上一直匀加速;221at l =得glt μ2=,所以物块从A 传送到B 的时间为glt μ2=或g v v l t μ2+=方法总结:如图所示是物块在传送带上的两种运行模式,分析可知,在传送带的长度一定时,把物块从A 运送到B 端的两种方式中,t0<t1结论是:如果能够保证物体在传送带上一路匀加速,那么物体到达右端所需的时间更短.例5、如图所示,一平直的传送带以速度v =2m/s 匀速运动,传送带把A 处的工件运送到B 处,A 、B 相距L =10m ,从A 处把工件无初速地放到传送带上,经过时间t =6s ,能传送到B 处,求: (1)工件在传送带上加速运动过程中的加速度大小及加速运动的时间; (2)欲用最短的时间把工件从A 处传送到B 处,求传送带的运行速度至少多大?【答案】(1)1m/s2 (2)52 【解析】对工件受力分析:对工件进行运动分析:假设工件从静止释放到与传送带共速共需要经历的时间为t 速度关系:)1...(at v =代入得2=at t=2s位移关系:,代入相关参数得:a=1m/s2如果工件在传送带上一路匀加速刚好到达B 端时的速度为V ,且刚好与传送带共速,此时传送带的速度即为其临界的最小速度。
例6、如图所示,倾角为θ的斜面,传送带AB之间的距离为L,传送带以速度v匀速转动,物块与传送带之间的摩擦因素为u,将物块从A点由静止释放,求物体从A传到B的时间;【答案】或【解析】要想将物体传上去有一个要求:对物块受力分析:运动分析:与水平类型完全一致;物体的运动有两种可能,先匀加速后匀速,或一直匀加速;一直匀加速:代入相关参数得:先匀加速后匀速:参考上一例题可知:代入相关参数得:例7、如图所示,一皮带输送机的皮带以v=13.6 m/s的速率做匀速运动,其有效输送距离AB=29.8 m,与水平方向夹角为θ=37°.将一小物体轻放在A点,物体与皮带间的动摩擦因数μ=0.1,求物体由A到B所需的时间.(g取10 m/s)【答案】3s【解析】本题的关键要注意两点:1、开始时传送带运动的速度大于物块的速度,所以物块受到传送带沿斜面向下的滑动摩擦力;2、当物块与传送带共速后物块的运动不一定是匀速的,需要进行相应的判断; 到达共速前阶段一受力分析:代入相关参数得a1=6.8m/s2设经过时间t1物块与传送带共速:s t a v 211==,物体产生的位移为:当物体与传送带达到共速后的阶段二对物体进行受力分析:需要先判断比较的大小关系,从而确定物体在第二阶段的运动情况; 对物体受力分析得:代入相关参数得a2=5.2m/s2对第二阶段的物体进行运动分析得:;代入相关参数得:t2=1s总时间t=t 1+t 2=3S;对本题说明:在第二阶段中比较的关系是非常重要的;当时,物体将匀速走完剩余的全程;当时,物体将以加速度a2继续前行;处理传送带模型的万能模板题型三、过程分析之弹簧模型在处理涉及弹簧类问题时需要注意弹簧最重要的特点就是弹力的大小是不能突变的,所以当外界状态变化时,连接在物体上的弹簧弹力是不变的;把握住弹簧的这一特点,分析问题时就与常规的力学问题是一样的。