水平角方向观测法记录表
- 格式:doc
- 大小:39.50 KB
- 文档页数:1
实训 方向观测法观测水平角一、 目的与要求1、学会方向观测法的观测程序。
2、了解方向观测法的精度要求及重测原则。
二、 仪器设备1、由仪器室借领:经纬仪1台,记录板1块。
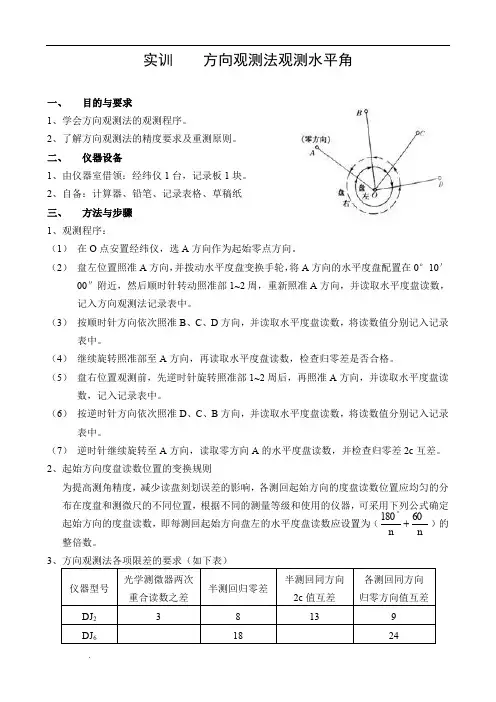
2、自备:计算器、铅笔、记录表格、草稿纸 三、 方法与步骤 1、观测程序:(1) 在O 点安置经纬仪,选A 方向作为起始零点方向。
(2) 盘左位置照准A 方向,并拨动水平度盘变换手轮,将A 方向的水平度盘配置在0°10′00″附近,然后顺时针转动照准部1~2周,重新照准A 方向,并读取水平度盘读数,记入方向观测法记录表中。
(3) 按顺时针方向依次照准B 、C 、D 方向,并读取水平度盘读数,将读数值分别记入记录表中。
(4) 继续旋转照准部至A 方向,再读取水平度盘读数,检查归零差是否合格。
(5) 盘右位置观测前,先逆时针旋转照准部1~2周后,再照准A 方向,并读取水平度盘读数,记入记录表中。
(6) 按逆时针方向依次照准D 、C 、B 方向,并读取水平度盘读数,将读数值分别记入记录表中。
(7) 逆时针继续旋转至A 方向,读取零方向A 的水平度盘读数,并检查归零差2c 互差。
2、起始方向度盘读数位置的变换规则为提高测角精度,减少读盘刻划误差的影响,各测回起始方向的度盘读数位置应均匀的分布在度盘和测微尺的不同位置,根据不同的测量等级和使用的仪器,可采用下列公式确定起始方向的度盘读数,即每测回起始方向盘左的水平度盘读数应设置为(nn 60180+︒)的整倍数。
34、计算与检验(1)光学测微器两次重合读数之差:瞄准目标后要进行两次测微,两次读数,且两次读数之差不超限。
(2)半测回归零差:即上下半测回中零方向两次读数之差。
①上半测回归零差超限,应立即重测。
②当下半测回归零差超限时,应重测整个测回。
(3)各测回同方向2c互差:上下半测回中,同一方向盘左、盘右水平度盘读数差,即2c=盘左读数—(盘右读数±180°)(当“盘右读数”>180°时取“—”,否则取“+”),反应了2倍视准轴误差。
实验四测回法和方向法观测水平角测量实验-适用非测绘类专业加入时间:2008-3-22 8:48:20 $$来源$$ 点击:1861一、目的与要求(1)掌握测回法观测水平角的观测顺序、记录和计算方法。
(2)掌握测回法观测水平角的观测顺序、记录和计算方法。
(3)掌握方向法观测水平角的操作顺序、记录、计算方法,了解各项限差的要求。
二、计划与设备(1) 实习时数为2~4学时。
每实习小组4~5人。
(2) 实习设备有DJ6光学经纬仪l台,记录板l块,竹三脚架2个,垂球2~3个,木桩3个,斧头1把,测伞1把。
自备2H铅笔2支。
三、方法与步骤(一)测回法观测水平角的操作步骤如图2-7,在测站点O上安置经纬仪,用盘左和盘右各观测水平角(∠AOB)一次,盘左观测时为上半测回,盘右观测时为下半测回。
如两次观测角值相差不超过容许误差±40″,则取其平均值作为一测回的结果。
这一种观测法称为测回法。
其观测步骤为:(1)上半测回,盘左瞄准左方点(如图4-1中的A点),读水平度盘读数(LA),记录在表2-7中;顺时针方向转动照准部,瞄准右方点(如图2-7中的B点),读水平度盘读数(LB),记录在表2-6中;计算上半测回角值β左=LB-LA。
(2)下半测回,盘右倒转望远镜,逆时针方向转动照准部,瞄准右方点B,读数得RB,记录;逆时针方向转动照准部,瞄准左方点A,读数得RA,记录;计算下半测回角值β右=RB--RA。
(3)检查有无超限上下半测回角值之差使用DJ6光学经纬仪观测时,其限差为",若超过限差″,则取上、下半测回角值的平均值为一测回水平角值,若超过限差±40",则需重测整个测回。
图 4-12.测回法观测水平角的练习在测区范围地面上选择彼此相距30m左右的三点A、B、C,打下木桩,在桩顶钉小铁钉或画十字作为标志中心;在A点安置经纬仪,在B、C点架设竹三脚架并挂垂球,用测回法测得∠A;同法分别在B、C点安置仪器,测得∠B、∠C。
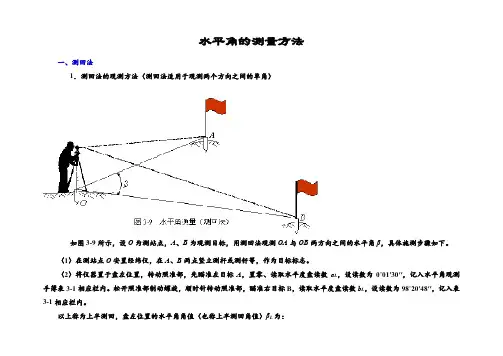
水平角的测量方法一、测回法1.测回法的观测方法(测回法适用于观测两个方向之间的单角)如图3-9所示,设O为测站点,A、B为观测目标,用测回法观测OA与OB两方向之间的水平角β,具体施测步骤如下。
(1)在测站点O安置经纬仪,在A、B两点竖立测杆或测钎等,作为目标标志。
(2)将仪器置于盘左位置,转动照准部,先瞄准左目标A,置零、读取水平度盘读数a L,设读数为0˚01′30″,记入水平角观测手簿表3-1相应栏内。
松开照准部制动螺旋,顺时针转动照准部,瞄准右目标B,读取水平度盘读数b L,设读数为98˚20′48″,记入表3-1相应栏内。
以上称为上半测回,盘左位置的水平角角值(也称上半测回角值)βL为:βL=b L-a L=98˚20′48″-0˚01′30″=98˚19′18″(3)松开照准部制动螺旋,倒转望远镜成盘右位置,先瞄准右目标B,读取水平度盘读数b R,设读数为278˚21′12″,记入表3-1相应栏内。
松开照准部制动螺旋,逆时针转动照准部,瞄准左目标A,读取水平度盘读数a R,设读数为180˚01′42″,记入表3-1相应栏内。
以上称为下半测回,盘右位置的水平角角值(也称下半测回角值)βR为:βR=b R-a R=278˚21′12″-180˚01′42″=98˚19′30″上半测回和下半测回构成一测回。
表3-1 测回法观测手簿测站竖盘位置目标水平度盘读数半测回角值一测回角值各测回平均值备注°′″°′″°′″°′″第一测回O 左A0 01 3098 19 1898 19 2498 19 30B98 20 48右A180 01 4298 19 30B278 21 12第二测回O 左A90 01 0698 19 3098 19 36B188 20 36右A270 00 5498 19 42B8 20 366OABβ均值作为一测回角值β。
在本例中,上、下两半测回角值之差为:△β=βL -βR =98˚19′18″-98˚19′30″=-12″一测回角值为:98˚19′18″+98˚19′30″98˚19′24″将结果记入表3-1相应栏内。
水平角观测的方法水平角观测方法一般根据观测的精度要求和目标的数目来定。
常用的测角方法有测回法和方向观测法。
(一)测回法测回法适用于观测只有两个方向之间的水平角,如图2-18所示,经纬仪安置在测站点O上,对中整平后按下述步骤进行水平角观测:图2-18 测回法水平角观测(1)经纬仪置于盘左位置。
所谓盘左(或称正镜),即观测者面对望远镜目镜,竖直度盘在望远镜的左侧。
(2)精确瞄准起始目标A并配置度盘。
配置度盘的目的是为了减小度盘刻划误差的影响并且也方便计算。
各测回之间起始目标的读数间隔应在180º/n (n为测回数)。
装有度盘变换手轮的经纬仪和装有复测卡的经纬仪配置度盘时有所不同,各自配置度盘方法如下:Ⅰ. 装有度盘变换手轮的经纬仪,使用这种仪器时,应先瞄准目标,后配置度盘。
其方法是:先盘左瞄准起始目标(如图2-18中的目标A),打开手轮护盖(有的仪器是按下手轮盖),转动手轮,直至读数窗看到所需读数,然后关好手轮护盖(或弹回手轮盖)Ⅱ. 装有复测器的经纬仪,使用这种仪器时,应先配置度盘,后瞄准目标。
其方法是:转动测微手轮,调节好测微尺上的分、秒读数,松开照准部制动螺旋,转动仪器直至在读数窗看到所需读数位于双指标线附近,制动照准部,调节照准部微动螺旋使双指标线精确对准所需读数。
扳下复测卡,然后再转动仪器(这时读数窗中的读数不会变化),精确瞄准起始目标,扳上复测卡。
但是应当注意,在转动度盘变换手轮和使用复测卡时往往会使经纬仪发生微小变动。
因此在读数前应仔细检查是否发生了变动,如存在则以实际为准。
完成上述工作后,观测员即可读取目标A的盘左水平度盘读数A左=0º01′12″,每次读数后记录员须回报确认无误后将该读数记入手簿。
见表2-1 (3)松开照准部制动螺旋,顺时针旋转照准部,照准目标B,读取水平度盘读数B左=60º20′24″,记入观测手簿。
以上观测过程称为上半个测回,其观测角值β左=B左-A左= 60º19′12″。
水平角观测的方法水平角观测方法一般根据观测的精度要求和目标的数目来定。
常用的测角方法有测回法和方向观测法。
(一)测回法测回法适用于观测只有两个方向之间的水平角,如图2-18所示,经纬仪安置在测站点O上,对中整平后按下述步骤进行水平角观测:图2-18 测回法水平角观测(1)经纬仪置于盘左位置。
所谓盘左(或称正镜),即观测者面对望远镜目镜,竖直度盘在望远镜的左侧。
(2)精确瞄准起始目标A并配置度盘。
配置度盘的目的是为了减小度盘刻划误差的影响并且也方便计算。
各测回之间起始目标的读数间隔应在180º/n (n为测回数)。
装有度盘变换手轮的经纬仪和装有复测卡的经纬仪配置度盘时有所不同,各自配置度盘方法如下:Ⅰ. 装有度盘变换手轮的经纬仪,使用这种仪器时,应先瞄准目标,后配置度盘。
其方法是:先盘左瞄准起始目标(如图2-18中的目标A),打开手轮护盖(有的仪器是按下手轮盖),转动手轮,直至读数窗看到所需读数,然后关好手轮护盖(或弹回手轮盖)Ⅱ. 装有复测器的经纬仪,使用这种仪器时,应先配置度盘,后瞄准目标。
其方法是:转动测微手轮,调节好测微尺上的分、秒读数,松开照准部制动螺旋,转动仪器直至在读数窗看到所需读数位于双指标线附近,制动照准部,调节照准部微动螺旋使双指标线精确对准所需读数。
扳下复测卡,然后再转动仪器(这时读数窗中的读数不会变化),精确瞄准起始目标,扳上复测卡。
但是应当注意,在转动度盘变换手轮和使用复测卡时往往会使经纬仪发生微小变动。
因此在读数前应仔细检查是否发生了变动,如存在则以实际为准。
=0º01′12″,完成上述工作后,观测员即可读取目标A的盘左水平度盘读数A左每次读数后记录员须回报确认无误后将该读数记入手簿。
见表2-1 (3)松开照准部制动螺旋,顺时针旋转照准部,照准目标B,读取水平度盘读数B左=60º20′24″,记入观测手簿。
以上观测过程称为上半个测回,其观测角值β左=B左-A左= 60º19′12″。
§3.6 方向观测法根据水平角观测操作基本规则,可制定出不同的观测方法,不论哪种观测方法均应能有效地减弱各种误差影响,保证观测结果的必要精度;操作程序要尽可能的简单、有规律,以适应野外作业。
不同等级的水平角观测的精度要求不同,其观测方法也不同。
当前三、四等以下的水平角观测采用“方向观测法”。
有时,二等三角观测也使用方向观测法。
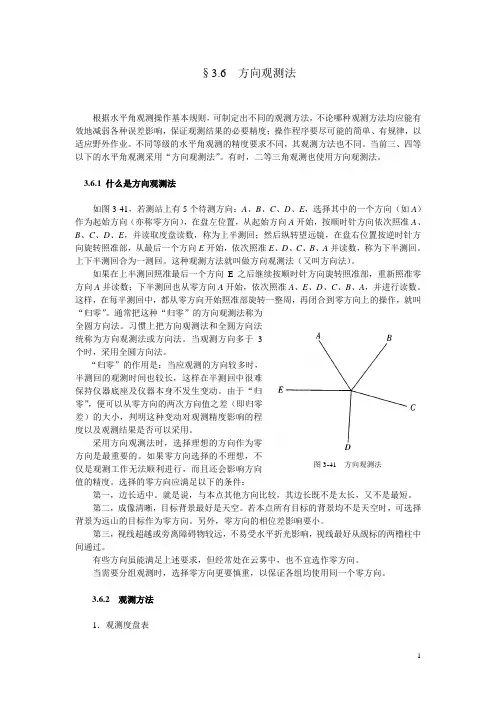
3.6.1 什么是方向观测法如图3-41,若测站上有5个待测方向:A、B、C、D、E,选择其中的一个方向(如A)作为起始方向(亦称零方向),在盘左位置,从起始方向A开始,按顺时针方向依次照准A、B、C、D、E,并读取度盘读数,称为上半测回;然后纵转望远镜,在盘右位置按逆时针方向旋转照准部,从最后一个方向E开始,依次照准E、D、C、B、A并读数,称为下半测回。
上下半测回合为一测回。
这种观测方法就叫做方向观测法(又叫方向法)。
如果在上半测回照准最后一个方向E之后继续按顺时针方向旋转照准部,重新照准零方向A并读数;下半测回也从零方向A开始,依次照准A、E、D、C、B、A,并进行读数。
这样,在每半测回中,都从零方向开始照准部旋转一整周,再闭合到零方向上的操作,就叫“归零”。
通常把这种“归零”的方向观测法称为全圆方向法。
习惯上把方向观测法和全圆方向法统称为方向观测法或方向法。
当观测方向多于3个时,采用全圆方向法。
“归零”的作用是:当应观测的方向较多时,半测回的观测时间也较长,这样在半测回中很难保持仪器底座及仪器本身不发生变动。
由于“归零”,便可以从零方向的两次方向值之差(即归零差)的大小,判明这种变动对观测精度影响的程度以及观测结果是否可以采用。
采用方向观测法时,选择理想的方向作为零方向是最重要的。
如果零方向选择的不理想,不图3-41 方向观测法仅是观测工作无法顺利进行,而且还会影响方向值的精度。
选择的零方向应满足以下的条件:第一,边长适中。
就是说,与本点其他方向比较,其边长既不是太长,又不是最短。
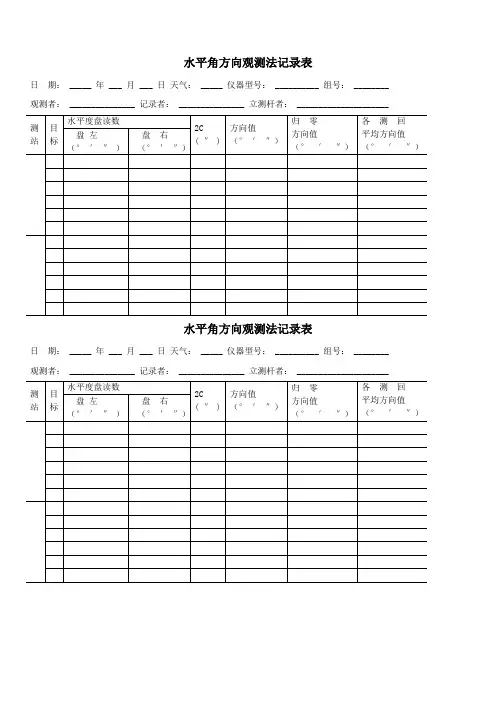
水平角方向观测法记录表日期: _____ 年 ___ 月 ___ 日天气: _____ 仪器型号: __________ 组号: ________ 观测者: _______________ 记录者: _______________ 立测杆者: _____________________水平角方向观测法记录表日期: _____ 年 ___ 月 ___ 日天气: _____ 仪器型号: __________ 组号: ________ 观测者: _______________ 记录者: _______________ 立测杆者: _____________________竖直角观测记录表日期:仪器型号:观测者:时间:天气:记录者:竖直角观测记录表日期:仪器型号:观测者:时间:天气:记录者:竖直角观测记录表日期:仪器型号:观测者:时间:天气:记录者:点号转折角°′″改正数°′″改正角°′″坐标方位角°′″距离m增量计算值改正后增量坐标值点号∆x/m∆y/m∆x/m∆y/m x/m y/m1234=2+35678910111213AB1234CD辅助计算点号转折角°′″改正数°′″改正角°′″坐标方位角°′″距离m增量计算值改正后增量坐标值点号∆x/m∆y/m∆x/m∆y/m x/m y/m1234=2+35678910111213AB1234CD辅助计算(注:本资料素材和资料部分来自网络,仅供参考。
请预览后才下载,期待你的好评与关注!)。
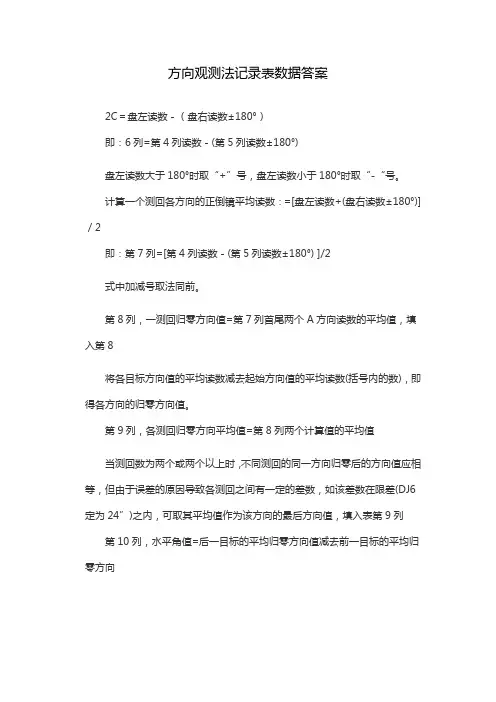
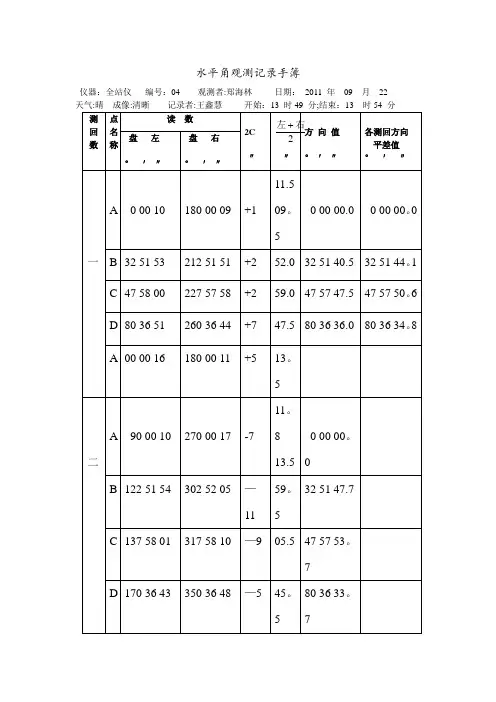
方向观测法记录表数据答案
2C=盘左读数-(盘右读数±180°)
即:6列=第4列读数-(第5列读数±180°)
盘左读数大于180°时取“+”号,盘左读数小于180°时取“-“号。
计算一个测回各方向的正倒镜平均读数:=[盘左读数+(盘右读数±180°)]/2
即:第7列=[第4列读数-(第5列读数±180°) ]/2
式中加减号取法同前。
第8列,一测回归零方向值=第7列首尾两个A方向读数的平均值,填入第8
将各目标方向值的平均读数减去起始方向值的平均读数(括号内的数),即得各方向的归零方向值。
第9列,各测回归零方向平均值=第8列两个计算值的平均值
当测回数为两个或两个以上时,不同测回的同一方向归零后的方向值应相等,但由于误差的原因导致各测回之间有一定的差数,如该差数在限差(DJ6定为24”)之内,可取其平均值作为该方向的最后方向值,填入表第9列第10列,水平角值=后一目标的平均归零方向值减去前一目标的平均归零方向。
二、方向观测法方向观测法,也称为全圆观测法,通常用于一个测站上照准目标多于三个的观测。
如图3-10所示,设O为测站点,A、O、C、D为目标点,在此情况下通常采用方向观测法。
1.方向观测法的观测方法(1)安经纬仪于站点O上,对中、整平后使仪器处于水平。
①照准起始方向(又称零方向)A,将水平度盘配置为所需读数,精确照准后读取水平度盘的读数(如00°12'42")。
②松开水平制动螺旋,按顺时针旋转照准部,照准目标b,读取水平度盘的读数(如60°18'42");③同样依次观测目标C、D,并读取照准各目标时的水平度盘读数(如116°40'18"、185°17'30");④继续顺时针转动望远镜,最后再观测零方向A,并读取水平度盘的读数(如00°02'30"),此照准A称之为归零。
此次零方向的水平度盘读数与第一次照准零方向的水平度盘读数之差称为归零差,若归零差满足要求(DJ6限定为18"),即完成了上半测回的观测。
(2)纵转望远镜使仪器处于盘右状态,再按逆时针方向依次照准目标A、D、C、B、A,称为下半测回。
同上半测回一样,照准各目标时,分别读取水平度盘的读数并记入记录手簿。
下半测回也存在归零差,若归零差满足要求,下半测回也告结束。
上、下半测回合称一个测回。
2 方向观测法的角值计算方向观测法的计算步骤:(1)计算两倍照准误差2c值:2c值=盘左读数—(盘右读数±180°)盘左读数大于180°时取“+”号,盘左读数小于180°时取“-”号。
(2)计算各目标的方向值的平均读数照准某一目标时,水平度盘的读数,称为该目标的方向值。
方向值平均读数=[盘左读数+(盘右读数±180°)]/2 (式中加减号取法同前)。