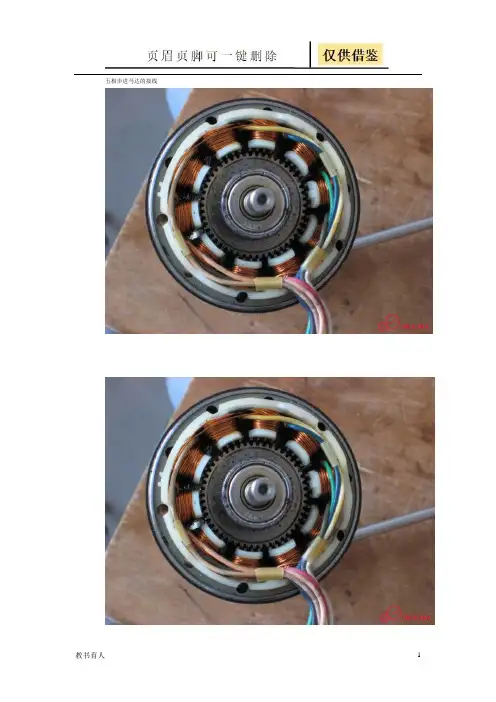
五相步进马达的接线
- 格式:doc
- 大小:178.50 KB
- 文档页数:3
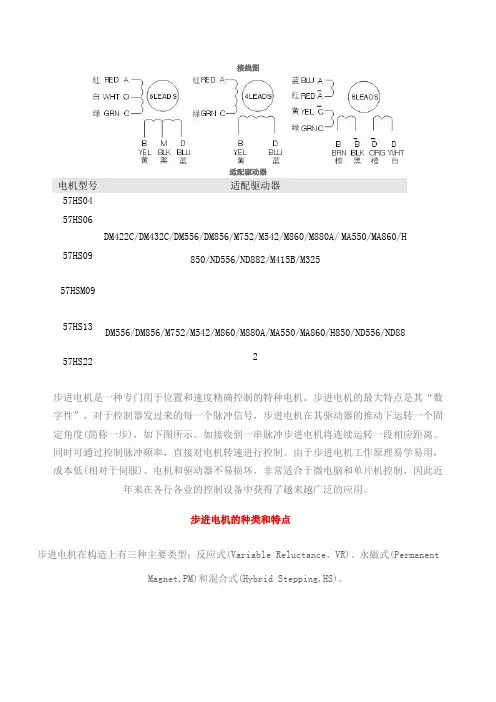
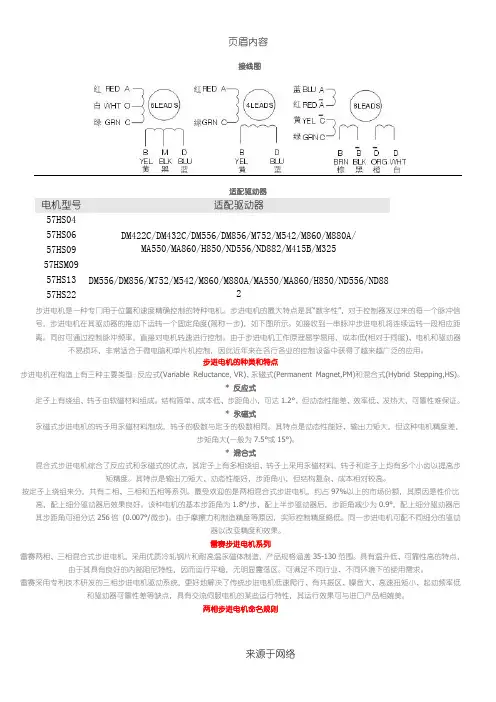
接线图适配驱动器电机型号 适配驱动器57HS04 DM422C/DM432C/DM556/DM856/M752/M542/M860/M880A/ MA550/MA860/H850/ND556/ND882/M415B/M32557HS0657HS0957HSM0957HS13DM556/DM856/M752/M542/M860/M880A/MA550/MA860/H850/ND556/ND88257HS22步进电机是一种专门用于位置和速度精确控制的特种电机。
步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。
如接收到一串脉冲步进电机将连续运转一段相应距离。
同时可通过控制脉冲频率,直接对电机转速进行控制。
由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。
步进电机的种类和特点步进电机在构造上有三种主要类型:反应式(Variable Reluctance ,VR)、永磁式(PermanentMagnet,PM)和混合式(Hybrid Stepping,HS)。
* 反应式定子上有绕组、转子由软磁材料组成。
结构简单、成本低、步距角小,可达°、但动态性能差、效率低、发热大,可靠性难保证。
* 永磁式永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。
其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为°或15°)。
* 混合式混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。
其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。
按定子上绕组来分,共有二相、三相和五相等系列。
最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。
五线电机抱闸线圈接法-回复五线电机抱闸线圈接法——为你详细解析引言:五线电机抱闸线圈接法是电机控制系统中的重要部分,它负责控制电机的运转和保护电机免受过载和其他电气故障的影响。
本文将一步一步地解释五线电机抱闸线圈接法的具体步骤和原理,以便读者更好地理解和实施相关的电气连接工作。
第一步:了解五线电机抱闸线圈的原理五线电机抱闸线圈是一种可控电磁线圈,通过施加电流来控制电机的启停和制动。
当施加正向直流电流时,电磁线圈形成磁场,吸引抱闸器,使它抱紧电机的转子,从而实现电机的制动。
当施加反向直流电流或无电流时,抱闸器释放,电机可以自由转动。
第二步:准备工作在开始接线之前,请确保已经拥有以下设备和材料:1. 五线电机抱闸线圈;2. 控制电源装置(如电源开关、断路器、继电器等);3. 控制信号装置(如按钮、开关等);4. 电缆和线束;5. 绝缘胶带、绝缘套管和接线端子。
同时,请注意以下事项:1. 停电工作:在进行任何电气连接之前,务必将电源断开,以避免触电风险;2. 安全标识:根据当地的安全标准,使用适当的标志和标识来警示和标识相关电气设备和连接。
第三步:接线顺序接线时,请遵循以下顺序:1. 连接控制电源:使用正确的电缆和线束,将控制电源装置与电机连接。
确保正确地连接正、负极和地线。
2. 连接抱闸线圈:将抱闸线圈正确地连接到电机。
通常,抱闸线圈由两根线组成,记作"A"和"B"。
A线是抱闸线圈的正极,B线是抱闸线圈的负极。
将A线连接到控制电源的正极,将B线连接到控制电源的负极。
同时,为了安全起见,将抱闸线圈的金属外壳与电机的接地线(如果有)连接起来。
3. 连接控制信号装置:使用适当的电缆和线束,将控制信号装置(例如按钮、开关等)与电机连接。
确保正确地连接各个控制信号装置的导线。
4. 绝缘处理:使用绝缘胶带、绝缘套管和接线端子对所有连接部分进行绝缘处理,以提高安全性和可靠性。

一种新的五相步进电机驱动电路开发 T.S. 维拉孔和 T. 萨马拉纳亚克斯里兰卡,佩勒代尼耶大学工程学院,电子与电气工程学院付自刚译摘要本文详细地介绍了一种新的五相步进电机驱动电路。
这种新的驱动电路是由商业上现成的,廉价的,标准的步进电机驱动 IC 搭建,它能实现由内部电流回路驱动的闭环速度和位置控制。
经证明, 这种驱动电路能推广到任何更多相数的奇数相的步进电机。
这种驱动电路具有速度控制和方向控制,包括全步、半步、顺时针、逆时针控制模式。
一、概述在大多数机器人和自动化工程设计中, 各种各样步进电机都被广泛应用来得到需要的运动姿态。
步进电机倍受人们青睐是因为它不需要频繁的维护并能在苛刻的环境中运行。
步进电机及其驱动器的选择要根据具体应用中需要的效果来决定。
市场上最常见的是两相和四相步进电机。
可是,实际应用中要求高精度,低噪声和低震动,因此五相步进电机得以应用。
因为步距角较小, 五相步进电机有较高的分辨率, 较低的震动和良好的加速与减速特性。
因此, 确保设计的驱动电路能使步进电机充分发挥这些优点非常重要。
因为在机器人应用中是很少见得类型,而且结构很复杂,很难找到它们的驱动IC ,只能专门定做。
结果导致五相步进电机的驱动电路产品异常昂贵。
用普通步进电机如二相与四相步进电机的驱动控制 IC 来制作其它步进电机的驱动电路是一种经济有效的方法。
L297继承了控制单极性和双极性步进电机所需要的所有控制电路系统。
L298N 双 H 桥驱动器形成了一个完善的步进电机微处理器接口。
在这里,我们通过给 L297和 L298N 加上微处理器和逻辑控制系统研究开发出了一种新的五相步进电机驱动电路。
第二部分解释了元器件特性。
第三部分介绍了控制逻辑电路设计。
第四部分是接口设计,结果在第五部分。
最后,第六部分加以总结。
二、主要元器件特性分析如图一所示,集成块 L297可以与 H 桥集成电路一起使用作为步进电机驱动器。
在该设计中, H 桥的功能用 L298N 或者 L293E 实现。

五相步进马达的接线让我来告诉你吧,先来看一下你的10根线,它应该有10种不同的颜色:10线五相应该是A相:兰--红B相:白--黄C相:棕--紫D相:黑--灰E相:橙--绿你用万用表测量一下是不是如此先,如果是这样的话就对了。
然后要怎么改你应该知道了吧。
我的问题解决了,告诉大家方法啊,先分相成五组,然后用指针式万用表电压档找出五相的同名端,具体就是旋转电机每相都正偏的就是同名端,然后分清采用星型接法还是五边形接法如果星型接法,将五条同名端并到一起短接,然后就是相序的排列了,这个很难啊,如果你有时间一定能试出来,最好找到同品牌产品的说明书,我的电机一共搞了两天才好用,引用了一篇文章判断步进电机的相序及首尾端妙判断步进电机的应用越来越普遍。
在使用过程中,电机的相序主要靠引出线的颜色、长度来区分。
若找不到说明书或标记不清,则步进电机的接线将十分麻烦。
笔者通过对步进电机工作原理的分析、得出步进电机相序及首尾端的判别方法。
下面以五相步进电机为例(要准备一节9伏电池和一个万用表)。
1. 用万用表电阻挡找出步进电机的五相绕组:Al—A2、B1-B2、C1-C2、 D1-D2、El-E2,如附图所示。
” 2,把万用表拨到直流微安挡。
将万用表的表笔接到其中一相,如B相上,红表笔接B1,黑表笔接B2。
3.将电池分别接步进电机其余四相,在接通瞬间记下万用表指针摆动幅度。
如果指针反转,则要调换电池极性。
在四次接通的瞬间,指针有两次摆动幅度最大,说明这两次电池所接的是万用表所接B相旁边的两相,即A 相和C相。
4.将万用表接A相或C相中的一相,如接C相。
用上述方法可找出C相旁边的两相:B相和D相。
依此类推,可按顺序找出A、B、C,D、E五相相序。
5. 如附图所示,电池接A相,万用表接B相,在电池接通的瞬间,万用表指针正转(如指针反转,应调换电池极性),则电池正极所接的Al端和万用表红表笔所接的B1端为首端。
依此方法,可以确定其余三相的首端C1,D1、E1。
随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
虽然步进电机已被广泛地应用,但步进电机并不能像普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
两相步进电机是现在最常用的步进电机,两相步进电机有4线的,5线的,6线的,8线的。
4线步进电机为现在最常用的,也是最简单的,直接A+A-B+B-对应接好就可以了。
5线步进电机可能比较少,现在只有一些日本的老机器上会有这类电机,5线怎么接?其实5线步进电机接线只是把6线步进电机的COM端并一起,用的时候把COM端分别并到Acom和Bcom上便可。
5线的步进电机接4线的驱动和接6线步进电机一样。
6线步进电机是早先的步进电机,因为最早步进电机驱动芯片换相需要COM端,后面随着双极驱动芯片的更新4线芯片可以换相了,现在4线的驱动相比用的较多,不过在高速场合6线的驱动还是有优势的。
6线的步进电机接6线的驱动,便是A+、Acom、A-、B+、Bcom、B-对应接好就可以了,若是6线步进电机接4线驱动器便有2种接法,为半绕和全饶,半绕就是用一半的饶组,就是A相接A+、Acom或Acom、A-,B相接B+、Bcom或Bcom、B-,通俗讲就是用一半绕组,因为单极驱动通过A+、Acom正传,通过Acom、A-反转。
半绕就是这样,故所有的电气参数和曲线图和单极基本一致,可以套用。
全饶是很容易用错电机的一种方式,一般6线的电机拿过来,就会照全饶接好,一看有A+A-B+B-接上就好了,结果电机发热又大还有可能烧电机,高速又没力矩,因为这种接法电机的参数改变了,电阻变为原来2倍,电感变为原来4倍,电流变为原来0.7倍,保持力矩变为原来1.4倍。
所以4线电机全绕适合低速大力矩,半绕适合高速。
8线步进电机为最方便的电机,既能接6线电机,4线高速和4线低速,分为A+、A+com、A-、A-com、B+、B+com、B-、B-com,接6线就很简单,把A+com和A-com并一起做com端便可,4线高速则为A+和A-com并一起接A+,A+com和A-并一起接A-,4线低速则为A+接A+,A-接A-,A+com和A-com并一起悬空,这样接的电流只能用高速解法的一半电流。
所谓“相数”,就是线圈组数。
二、三、四、五相步进电机分别对应有2、3、4、5组线圈。
N 相步进电机有N 个绕组,这N 个绕组要均匀地镶嵌在定子上,一个绕组可排列产生至少一个的磁极,因此定子的磁极数必定是N 的整数倍,因此,转子转一圈的步数应该是N 的整数倍;也就是说:3 相步进电机转一圈的步数是 3 的整数倍,4 相步进电机转一圈的步数是 4 的整数倍,5相步进电机转一圈的步数是5 的整数倍;如果步进电机的基本步距角为θ ,转一圈的步数是M ,步进电机的相数是N 则有下述关系:θ=360/M 由于上述机械对称原理,M 必然是相数N 的整数倍。
跟据以上分析可以看出,基本步距角是不能取任意值的。
步进电机外部的接线和相数没有必然的联系。
是根据实际运用的需要来决定的。
比如说8根引出线的二/四相电机,可以根据使用要求并接成4根线的二相电机,也可以并接成5根线或6根线的四相电机。
有六个引出线既可能是3相电机,也可能是2/4相电机,还可能是5相电机. 万用表放到X1挡量一下, 1.能分成三个独立的绕组的是3相电机; 2.如果三个头相通,而同另外三个头不通,则是2/4相步进电机; 3.如果是5相步进电机,则5根线对应5相,另一根是公共端.
我可以把不同相数电机引出线大概罗列一下,不全之处请其他高手补充。
1、二相电机:引出线可以是4根或8根。
2、四相电机:引出线可以是5根、6根或8根。
3、三相电机:引出线可以是3根或6根。
4、五相电机:引出线可以是5根、6根或10根。
以上为两相步进电机出线和接线示意图。
以上为三相步进电机出线和接线示意图。
以上为五相步进电机出线和接线示意图。
电子技术课程设计任务书1.课程设计的内容和要求(包括原始数据、技术要求、工作要求等) :一、设计并仿真五相/三相步进电机驱动电路。
二、主要技术指标与要求: (1)基本要求 a、步进电机能够运行在五拍(或十拍)/三拍(或六拍)工作方式; b、能实现步进电机手动和连续运行; c、利用仿真软件对硬件电路仿真。
(2)扩展功能 a、步进电机步距角为 0.750/1.50 可控; b、能实现步进电机正/反转。
三.部分参考元件 74LS174 IRF540 NE555 74HC138 IRF640 CW338 CC4011 TWH8751 LM7812 1N4007i电子技术课程设计任务书2.对课程设计成果的要求〔包括图表、实物等硬件要求〕 : 设计电路,安装调试或仿真,分析实验结果,并写出设计说明书。
要求图纸布局合理,符合工程要求,所有的器件的选择要有计算依据。
3.主要参考文献:[1] 彭介华. 电子技术课程设计指导[M]. 北京:高等教育出版社,1997 [2] 毕满清. 电子技术实验与课程设计[M]. 北京:机械工业出版社,1995 [3] 陈明义. 电工电子技术课程设计指导[M]. 长沙:中南大学出版社,2002 [4] 陈永甫. 新编 555 集成电路应用 800 例[M]. 北京:电子工业出版社 [5] . [6] 陈隆昌.控制电机[M]. 西安:西安电子科技大学出版社,2004 20004.课程设计工作进度计划: 序号1 2 3 4 5 6 7起 迄 日 期2010-1-10 2010-1-11 2010-1-12 2010-1-13 2010-1-14~2010-1-21 2010-1-22 2010-1-23 徐祖华工 作 内 容布置任务,教师讲解设计方法及要求 学生查找阅读资料,并确定方案 学生设计小组会议,讨论方案 设计及计算 仿真实验并写说明书,小组讨论 答辩 答辩 日期: 2010 年 1 月 6 日指导教师ii。
步进电机的接线方法
步进电机有两种常见的接线方法:单相接线和双相接线。
1. 单相接线方法:
单相接线方法又称为单相驱动接线方法,电机有两个线圈,每个线圈与电源交流电的一个端子连接,并且两个线圈之间相隔90度电位。
这种接线方法适合推动较小的负载。
2. 双相接线方法:
双相接线方法又称为双相驱动接线方法,电机有四个线圈,将它们分为两组,每组两个线圈连接在一起,并且每组线圈之间相隔90度电位。
这种接线方法适合推动较大的负载。
无论采用哪种接线方法,步进电机都需要使用专用的驱动器来控制电机的运动。
驱动器通过控制电流的方向和大小来控制步进电机的转动角度。
∙o接线图适配驱动器电机型号 适配驱动器57HS04 DM422C/DM432C/DM556/DM856/M752/M542/M860/M880A/MA550/MA860/H850/ND556/ND882/M415B/M325 57HS06 57HS0957HSM0957HS13 DM556/DM856/M752/M542/M860/M880A/MA550/MA860/H850/ND556/ND882 57HS22步进电机是一种专门用于位置和速度精确控制的特种电机。
步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。
如接收到一串脉冲步进电机将连续运转一段相应距离。
同时可通过控制脉冲频率,直接对电机转速进行控制。
由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。
∙步进电机的种类和特点步进电机在构造上有三种主要类型:反应式(Variable Reluctance ,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
* 反应式定子上有绕组、转子由软磁材料组成。
结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。
* 永磁式永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。
其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。
* 混合式混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。
其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。
按定子上绕组来分,共有二相、三相和五相等系列。
可编程控制器课程设计报告课题:五相十拍步进电动机控制程序的设计与调试姓名:杨保顺班级:0891311学号:24指导教师:王振力、刘洋、徐秋景2010年12月30日一、系统功能1. 五相十拍步进电动机可实现正转和反转,并且有低速、中速、高速可以选择。
2. 在启动步进电机之前要选择步进电机的速度和转动方向,然后按下启动按钮启动步进电机。
3. 在步进电机运转的过程中想要改变速度或者转向必须先按停止按钮,停止步进电机后再调整其速度或者转向。
4. 步进电机正转时其五个绕组通电的顺序是:A→AB→B→BC→C→CD→D→DE→E→EA→A反转时其五个绕组通电的顺序是:A←AB←B←BC←C←CD←D←DE←E←EA←A5. 步进电机低速运行时转过一个步距角需 2 s;高速运行时转过一个步距角需 1 s;高速运行时转过一个步距角需 1 s。
二、控制方案工作方式:手动输入设备:按钮、开关输出设备:晶体管PLC选型:40点输入输出CPM1A三、分配输入/输出点地址五相十拍步进电机的输入开关及控制A、B、C、D、E、五个绕组的输出端在PLC中的I/O编址如表1所示表1 I/o地址分配表输入点输出点元件名称符号地址编码元件名称符号地址编码启动按钮SB1 0.00 绕组A A 10.00停止按钮SB2 0.01 绕组B B 10.01 低速运行开关SA1 0.02 绕组C C 10.02 中速运行开关SA2 0.03 绕组D D 10.03 高速运行开关SA3 0.04 绕组E E 10.04 正转选择开关SA4 0.05反转选择开关SA5 0.06四、电气接线图五、顺序功能图五、程序编写六、调试我们先使用CP1H实验箱中的五相步进电机及CP1H对程序进行调试,经过实验调试使程序能够通过CP1H完全实现课程设计的要求。
然后我们再将用CP1H编写的程序改写为CPM1A的程序。
程序改写好后,我们先将CPM1A的外部电路接好,然后将改写的程序传入CPM1A,按照顺序按下按钮拨动开关后,发现五相步进电机不按照我们设定的要求变化,经过检查调试发现是线圈绕组C和线圈绕组D接反,将线圈绕组接正确后,CPM1A 能够完全按照要求完成实验目的。
五相步进马达的接线
让我来告诉你吧,先来看一下你的10根线,它应该有10种不同的颜色:
10线五相应该是
A相:兰--红
B相:白--黄
C相:棕--紫
D相:黑--灰
E相:橙--绿
你用万用表测量一下是不是如此先,如果是这样的话就对了。
然后要怎么改你应该知道了吧。
我的问题解决了,告诉大家方法啊,先分相成五组,然后用指针式万用表电压档找出五相的同名端,具体就是旋转电机每相都正偏的就是同名端,然后分清采用星型接法还是五边形接法如果星型接法,将五条同名端并到一起短接,然后就是相序的排列了,这个很难啊,如果你有时间一定能试出来,最好找到同品牌产品的说明书,我的电机一共搞了两天才好用,引用了一篇文章
判断步进电机的相序及首尾端
妙判断
步进电机的应用越来越普遍。
在使用过程中,电机的相序主要靠引出线的颜色、长度来区分。
若找不到说明书
或标记不清,则步进电机的接线将十分麻烦。
笔者通过对步进电机工作原理的分析、得出步进电机相序及首尾端的判别方法。
下面以五相步进电机为例(要准备一节9伏电池和一个万用表)。
1. 用万用表电阻挡找出步进电机的五相绕组:Al—A2、B1-B2、C1-C2、 D1-D2、El-E2,如附图所示。
” 2,把万用表拨到直流微安挡。
将万用表的表笔接到其中一相,如B相上,红表笔接B1,黑表笔接B2。
3.将电池分别接步进电机其余四相,在接通瞬间记下万用表指针摆动幅度。
如果指针反转,则要调换电池极性。
在四次接通的瞬间,指针有两次摆动幅度最大,说明这两次电池所接的是万用表所接B相旁边的两相,即A 相和C相。
4.将万用表接A相或C相中的一相,如接C相。
用上述方法可找出C相旁边的两相:B相和D相。
依此类推,可按顺序找出A、B、C,D、E五相相序。
5. 如附图所示,电池接A相,万用表接B相,在电池接通的瞬间,万用表指针正转(如指针反转,应调换电池极性),则电池正极所接的Al端和万用表红表笔所接的B1端为首端。
依此方法,可以确定其余三相的首端C1,D1、E1。
(肖正光)。