matlab实验六 SIMULINK基本用法
- 格式:doc
- 大小:390.50 KB
- 文档页数:6

实验六 SIMULINK 基本用法一 实验目的1. 学习SIMULINK 软件工具的使用方法;2. 用SIMULINK 仿真线性系统;二 实验内容1.SIMULINK 简介SIMULINK 是MATLAB 软件的扩展,它是实现动态系统建模和仿真的一个软件包,它与MATLAB 语言的主要区别在于,其与用户交互接口是基于Windows 的模型化图形输入,其结果是使得用户可以把更多的精力投入到系统模型的构建,而非语言的编程上。
所谓模型化图形输入是指SIMULINK 提供了一些按功能分类的基本的系统模块,用户只需要知道这些模块的输入输出及模块的功能,而不必考察模块内部是如何实现的,通过对这些基本模块的调用,再将它们连接起来就可以构成所需要的系统模型(以.mdl 文件进行存取),进而进行仿真与分析。
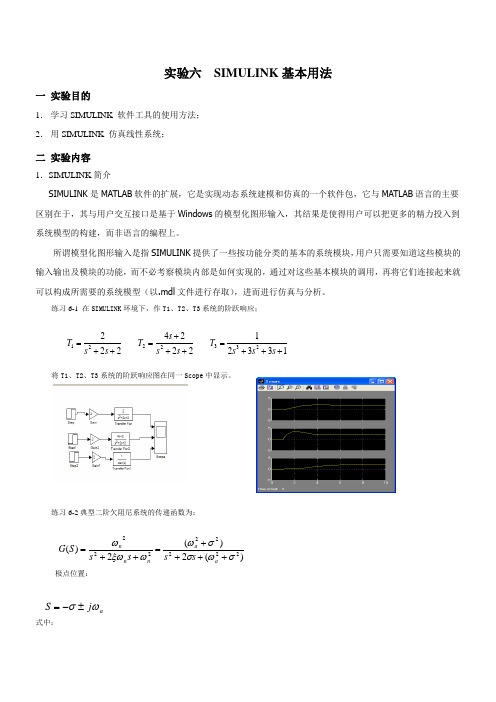
练习6-1 在SIMULINK 环境下,作T1、T2、T3系统的阶跃响应;将T1、T2、T3系统的阶跃响应图在同一Scope 中显示。
练习6-2典型二阶欠阻尼系统的传递函数为:极点位置:式中:1332122242222332221+++=+++=++=s s s T s s s T s s T )(2)(2)(22222222σωσσωωξωω++++=++=a a n n n s s s s S G aj S ωσ±-=在SIMULINK 环境下,作该系统在以下参数时的仿真:① 设ωa=1, σ=0.5,1,5 ,求阶跃响应,(用同一Scope 显示);②设σ=1 , ωa=0.5,1,5 ,求阶跃响应在(用同一Scope 显示);③设:求阶跃响应(用同一Scope 显示);④设 25,2,22,21==n ωξ0006045302==θωn )cos(;1;2θξξωωξωσ=-==n a n求阶跃响应,(用同一Scope显示);阶跃响应的时间:0≤t≤10,阶跃信号幅值为+2V。
分析参数变化(增加、减少与不变)对阶跃响应的影响。



Simulink基本操作(2014.5 兰交大萌芽)Simulink是MATLAB软件所带的软件仿真工具。
其强大的功能几乎可以满足所有的系统仿真。
要掌握基本的仿真操作,必须认识仿真各个模块的英文名称。
其实记住图形是干嘛的即可。
说实话在运用外语软件时,英语真是个让人头疼的问题。
不过,得必须记住的是,在任务/现实面前,只能向前迈步。
下面我们介绍Simulink的基本操作,以截图为主。
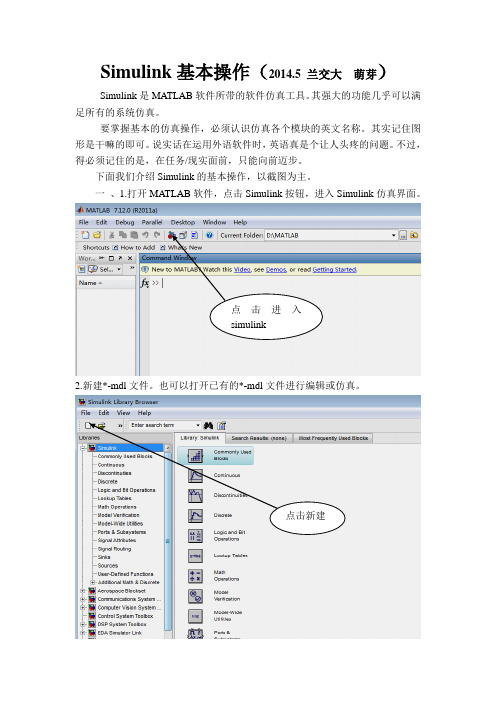
一、1.打开MATLAB软件,点击Simulink按钮,进入Simulink仿真界面。
点击进入simulink2.新建*-mdl文件。
也可以打开已有的*-mdl文件进行编辑或仿真。
点击新建3.出现*-mdl界面。
现在进可以编辑机构框图了。
4.完成后,点击运行按钮,同时保存文件位置,注意文件地址要明确。
运行按钮Simulink给我们的基本模块结构很多,都在Simulink library browser窗口中。
其中有基本模块和专业模块。
常用基本模块。
二、下面,我们举例说明其简单的使用说明。
以下图为例。
该图为计算机控制系统的最少拍有纹波控制系统。
1.首先,添加各模块,同时修改其参数值,还可以边添加连线。
2.右键点击Add to …即可添加模块到*-mdl文件中。
点击右键点击我们可以改变其位置和大小。
3.再依次添加这两个。
发现在*-mdl文件中出现以下现象,不要着急!4.这时我们可以把他们移开(点击一个,拉开,再点击一个,拉开)同时放大合适的比例。
5.修改其属性的选中模块,双击打开。
比如Sum修改点击ok 得到6.双击Mux,在option中选择signals 点击ok,得连线鼠标放在箭头处,拉动,放入入口箭头处即可。
7.题目里出现两个相同模块的,可以进行复制、粘贴。
得到两个模块后在进行属性和参数的修改8.接着进行别的模块添加工作。
9.模块添加完成。
进行属性和参数设置,得到注;为了能让大家看的清楚些,我把布局缩小了,在自己实验仿真时,完全可以放开成大窗口,将模块放大,更清晰明了,不要小家子气。
实验六:Simulin建模与仿真一、实验目的1、掌握Simulink建模与仿真的基本方法。
2、熟悉Simulink基本模块库及主要元件的使用方法。
二、实验学时:4学时三、实验原理:1、Simulink 仿真过程在已知系统数学模型或系统框图的情况下,利用Simulink进行建模仿真的基本步骤如下。
(1)启动Simulink,打开Simulink库浏览器。
(2)建立空白模型窗口。
(3)由控制系统数学模型或结构框图建立Simulink仿真模型。
(4)设置仿真参数,运行仿真。
(5)输出仿真结果。
2、Simulink建模与仿真基本方法根据给定的数学模型或控制系统框图,可建立Simulink仿真模型。
下面以图3-1所示的控制系统框图为例,说明Simulink建模与仿真的基本方法。
图中R 是单位阶跃输入信号,Y为系统输出响应。
建立图6-3所示系统框图的Simulink仿真模型的基本方法如下。
1.启动MATLAB/Simulink工具箱依次启动MATLAB软件、Simulink模块库浏览器后,如图6-1所示。
2.建立Simulink空白模型Simulink空白模型的建立可通过如下方法进行。
1、在MATLAB主窗口中选择【File】→【New】→【Model】命令。
2、在Simulink模块库浏览器窗口中选择【File】→【New】→【Model】命令。
3、单击Simulink模块库浏览器工具栏中的(New model)工具。
图6-1 闭环控制系统框图通过上述方法可以打开Simulink空白模型,如图6-2所示。
并可将其保存为后缀是mdl的文件(Simulink仿真模型的文件存储格式),例如Example_Model.mdl。
在保存Simulink模型文件的时候,为了实现向下兼容,MATLAB R2008/Simulink 7.1允许将模型保存为其他版本的Simulink模型。
图6-2 空白模型窗口3.根据系统框图选择模块构建Simulink仿真模型,首先需要知道所需模块所属的子模块库名称。
使用篇1.以管理员身份运行matlab2.登录后把当前文件夹改成C盘,找到TwinCAT→Functions→TE1400→SetupTwinCATTarget.p3.找到这个文件后右键选择Run,注意:这一步是为了选择matlabsimulink编译的module所需要的编译器种类,是第一次运行使用matlab+TE1400的时候必须执行的,以后就不必每次都操作这一步。
运行后在matlab主窗口提示让你选择是否用本地的编译器因为本地有VS2010的编译器,所以选择y后敲回车随后matlab找到本地有两种编译器,一个是matlab本体的lcc-win32 C2.4.1,另一个是VS2010,选择VS2010所代表的数字,输入2敲回车最后让matlab让你确认编译器的选择,输入y敲回车提示以下信息说明编译器选择完成4.点击工具栏中simulink图标5.弹出simulink编辑界面后,点击工具栏中的打开模型6.找到案例模型TempContrTest.mdl,点击打开7.本次案例模型是一个简单的温度控制External Setpoint是设定温度Feedback Temp是当前温度CoolerON是开关量输出8.打开simulation菜单栏,选择configuration parameters进行参数设定(1)进入参数设定后,选择右边的树形栏中的Solver,把其中的Type改成Fixed-step(2)之后选择树形栏中的Code Generation,把其中的System target file改成TwinCAT.tlc 点击Browse可以进行选择(3)继续选择树形栏中的Tc Module,在Publish module和Publish binaries for platform “TwinCAT RealTime(x86)”前打勾(4)最后选择树形栏中的Tc Advanced,把Task assignment改成Default在Add to cyclic caller,Variable cycle time,Export block digram以及Export block diagram debug information前打勾(5)以上操作完成后点击左下角的Apply(6)选择树形栏中的Code Generation,把Generate code only勾选后点击Generate code,随后matlab就开始把这个模型通过TE1400生成TC3所识别的Module了(7)回到matlab主窗口,等看到以下提示说明Module生成完成(8)我们来看下生成的Module会在什么位置可以发现在TwinCAT/3.1/CustomConfig/Modules路径下会生成名字和案例模型名字一样的文件夹TempContrTest打开可以发现里面其实主要是.tmc文件是TC3所需要的,其他都是一些描述文件,所以可以把.tmc文件拷贝出来,给一些没有Matlab的电脑上用9.打开TC3,并新建项目10.把名称改成英文,例如matlabsimulink,点击确认11.打开SYSTEM,右键TcCOM Objects添加新项12.TC3会自动找到之前生成的.tmc文件,选中后点击OK进行添加13.添加好后我们可以发现TcCOM Objects下出现matlab生成的Module,并且3个变量出现在IO位置,方便和PLC程序或者硬件IO进行变量连接14.右键Tasks添加新项名字可以改成matlab,点击OK添加新的Task15.因为我需要实施做温度计算,所以可以这个Task的优先级提高,修改成1,周期用默认的10ms即可16.双击TcCOM Objects下面的Object1(TempContrTest)Depend On改成Manual Config,并把Task分配成之前创建的名为“matlab”的Task17.右键PLC添加新项18.把名称修改为英文,例如test19.编辑一段模拟程序,模拟温度的升降20.程序写好后右键test Project,选择生成开始编译程序21.编译好后在test Instance自动生成3个变量22.接下来要做的就是把PLC中3个变量和matlab中三个变量链接起来Switch→CoolerONSP→External SetpointPV Feedback Temp23.变量链接完成后开始下传配置和程序,选择菜单栏TwinCAT,点击Activate Configuration弹出窗口点击确定提示切换到运行模式点击确定观察右下角图标是否编程绿色运行状态弹出窗口点击确定提示切换到运行模式点击确定观察右下角图标是否编程绿色运行状态24.打开PLC菜单,选择“登录到”把程序在线25.打开PLC菜单,选择“启动”把程序运行26.观察程序,看到成功利用matlab温度算法运行程序27.打开Object1(TempContrTest),选择Block Diagram也可以同时观察Matlab温度算法实时状态注:上图中可以看到由一个红色字提示说是非商业的,虽然TE1400插件装上了,但用的还是7天试用版,所以对于试用版有一些限制,查询information system可以看到如下:TC3中Scope View简单使用在之前的基础上来看下TC3下Scope View如何使用,装好TC3后Scope View会自动集成在TC3中1.首先右键“解决方案”选择添加,点击新建项目2.选择TwinCAT Measurement中的Measurement Scope Project,名称改成英文,例如tempcontrol,点击确定3.右键Axis,选择Target Browser4.打开小电脑图标下的Port_851(851),点击MAIN5.把MAIN程序中PV和SP分别添加到同一个坐标上6.保证程序在运行后,点击工具栏中的Record开始记录两个变量7.随后就可以观察到当前PV和SP的示波图下图中绿色是PV,蓝色是SP。
Simulink仿真环境基础学习Simulink就是面向框图的仿真软件。
7、1演示一个Simulink的简单程序【例7、1】创建一个正弦信号的仿真模型。
步骤如下:(1) 在MATLAB的命令窗口运行simulink命令,或单击工具栏中的图标,就可以打开Simulink模块库浏览器(Simulink Library Browser) 窗口,如图7、1所示。
图7、1 Simulink界面(2) 单击工具栏上的图标或选择菜单“File”——“New”——“Model”,新建一个名为“untitled”的空白模型窗口。
(3) 在上图的右侧子模块窗口中,单击“Source”子模块库前的“+”(或双击Source),或者直接在左侧模块与工具箱栏单击Simulink下的Source子模块库,便可瞧到各种输入源模块。
(4) 用鼠标单击所需要的输入信号源模块“Sine Wave ”(正弦信号),将其拖放到的空白模型窗口“untitled ”,则“Sine Wave ”模块就被添加到untitled 窗口;也可以用鼠标选中“Sine Wave ”模块,单击鼠标右键,在快捷菜单中选择“add to 'untitled'”命令,就可以将“Sine Wave ”模块添加到untitled 窗口,如图7、2所示。
(5) 用同样的方法打开接收模块库“Sinks ”,选择其中的“Scope ”模块(示波器)拖放到“untitled ”窗口中。
(6) 在“untitled ”窗口中,用鼠标指向“Sine Wave ”右侧的输出端,当光标变为十字符时,按住鼠标拖向“Scope ”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。
如图7、3所示。
(7) 开始仿真,单击“untitled ”模型窗口中“开始仿真”图标,或者选择菜单“Simulink ”——“Start ”,则仿真开始。
双击“Scope ”模块出现示波器显示屏,可以瞧到黄色的正弦波形。
实验六 SIMULINK 基本用法
一 实验目的
1. 学习SIMULINK 软件工具的使用方法;
2. 用SIMULINK 仿真线性系统;
二 实验内容
1.SIMULINK 简介
SIMULINK 是MATLAB 软件的扩展,它是实现动态系统建模和仿真的一个软件包,它与MATLAB 语言的主要区别在于,其与用户交互接口是基于Windows 的模型化图形输入,其结果是使得用户可以把更多的精力投入到系统模型的构建,而非语言的编程上。
所谓模型化图形输入是指SIMULINK 提供了一些按功能分类的基本的系统模块,用户只需要知道这些模块的输入输出及模块的功能,而不必考察模块内部是如何实现的,通过对这些基本模块的调用,再将它们连接起来就可以构成所需要的系统模型(以.mdl 文件进行存取),进而进行仿真与分析。
练习6-1 在SIMULINK 环境下,作T1、T2、T3系统的阶跃响应;
将T1、T2、T3系统的阶跃响应图在同一Scope 中显示。
练习6-2典型二阶欠阻尼系统的传递函数为:
极点位置:
式中:
1
332122242222332221+++=+++=++=
s s s T s s s T s s T )
(2)(2)(22222222σωσσωωξωω++++=++=a a n n n s s s s S G a
j S ωσ±-
=
在SIMULINK 环境下,作该系统在以下参数时的仿真:
① 设ωa=1, σ=0.5,1,5 ,求阶跃响应,(用同一Scope 显示);
②设σ=1 , ωa=0.5,1,5 ,求阶跃响应在(用同一Scope 显示);
③设:
求阶跃响应(用同一Scope 显示);
④设 2
5,2,2
2,
2
1=
=n ωξ0
006045302==θωn )cos(;1;2
θξξωωξωσ=-==n a n
求阶跃响应,(用同一Scope显示);
阶跃响应的时间:0≤t≤10,阶跃信号幅值为+2V。
分析参数变化(增加、减少与不变)对阶跃响应的影响。
实验七 SIMULINK 对经典控制系统的设计仿真
一 实验目的:
学习用Simulink 软件工具对经典控制系统进行仿真设计的基本方法。
二 实验内容
用Simulink 工具对下列题目进行仿真设计。
练习7-1 带有右零点或时间迟延环节的系统称为非最小相位系统。
本题是研究非最小相位零点的作用。
已
知系统的传递函数为,编写程序并仿真:
①、设n (s )=1.5,求该二阶系统阶跃响应及超调量、峰值时间、过渡过程时间;
②、设n (s )=(-s +a)/a ,a={1,3,6},求该二阶系统阶跃响应;
③、设n (s )=(s +a)/a ,a={1,3,6},求该二阶系统阶跃响应;
5
.15.0)()(2++=S S S n S
G
21)(S S G
④、分别绘制②③两项的阶跃响应图,并列表表示所得结果。
②③两项的阶跃响应图中应附有①项的阶跃响应曲线,以作比较;
⑤、基于所得的数据,试叙述在阶跃响应中左平面零点与右平面零点各自的作用是什么?
练习7-2 分析滞后与超前补偿器在不稳定系统中的补偿作用。
以双积分器为例:
其补偿器有如下三种:
Ⅰ、比例补偿器:K(S)=KC
Ⅱ、超前补偿器:K(S)=KC(S+1)/(S+5)
Ⅲ、滞后补偿器:K(S)=KC(S+5)/(S+1)
讨论: ①、在第一种情况下,系统能稳定吗?增加KC 的作用是什么?
②、在第二种情况下,系统能稳定吗?增加KC 的作用是什么?
③、在第三种情况下,系统能稳定吗?增加KC 的作用是什么?
④、设KC={0.1,0.5,1},对以上每一种情况进行仿真,求其阶跃响应,要求将这三种情况的闭环阶
跃响应绘制在同一张图中。
在每种情况中,仿真时间为{10,50,5}。
练习7-3 对典型的PID控制系统模型进行Simulink仿真,记录仿真结果。
并将阶跃输出结果和时间变量写到MA TLAB的工作空间变量t和y中,用Plot(t ,y)将仿真结果打印出来。
比较两种仿真结果。
取Kp=10,Ki=3,Kd=2
PID控制系统模型框图和Simulink仿真图见图7-1,图7-2;
图7-1 PID控制系统模型框图。