超声振动测量
- 格式:ppt
- 大小:8.97 MB
- 文档页数:25
声速的测量(超声)一、实验目的:①用共振干涉法求超声声速;②用相位比较法求超声声速。
二、实验仪器:超声声速测量仪、信号发生器、数字频率计、同轴电缆、示波器、游标卡尺、压电陶瓷超声换能器。
三、实验原理:①声速的测量:利用公式νλ,测量声波的频率ν和波长λ去求声速v。
②声压驻波:已知两列频率、振幅和振动方向相同的平面简谐波,向相反的方向传播时,叠加的合成波就是驻波,在驻波场中质点振幅最大处为波腹,质点位移振幅近似为零处为波节,相邻波腹或波长的距离为半波长(λ/2)。
③声波波长的测量:接收器S2输出的信息有两部分:1、驻波的信息,其振幅随S2的移动而变化,在共振时,S1、S2的距离为l:,,,此时振幅较大。
2、类似行波的信息,S1、S2用的相位差,也随着S2的移动而变化,每移动λ/2,相位差改变Π(即180°)。
利用这两种信息均可测量声波波长λ。
(1)共振干涉法;(2)相位比较法。
四、实验方法:①用共振干涉法测声速:示波器的X端用内部扫描,调内部扫描与S2的信息同步,示波器上显示的是S2的交流信号按时间展开的图形,移动S2示波器上图形有时很大,有时很小。
在S2移动范围内,仔细测多个出现极大值时S2的位置l1、l2、……、l n,用逐差法求出λ,再求声速v。
②用相位比较法测声速:示波器的X端用内部扫描,调内部扫描与S2的信息同步,移动S2示波器上的图形会从椭圆变换到一条直线,再从直线变换到一个反方向的椭圆,往复变换。
在S2移动范围内,仔细测多个出现直线时S2的位置l1、l2、……、l n,用逐差法求出λ,再求声速v。
③记录实验室的实温t。
④用当前实温和公式求出声速,与以上两种方法求出的声速进行比较,分析。
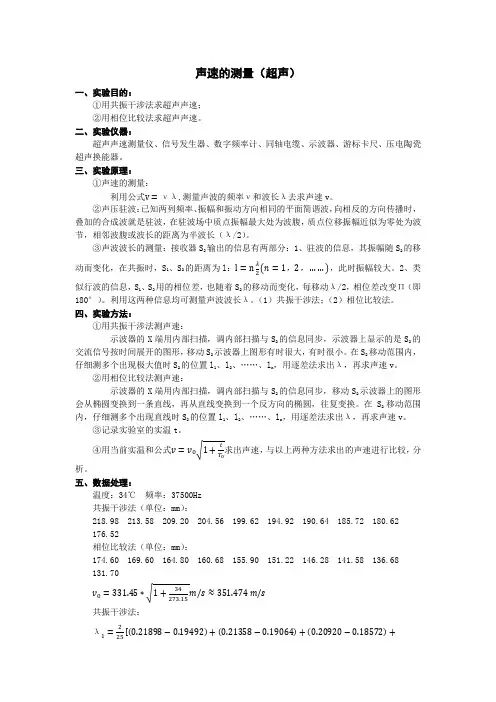
五、数据处理:温度:34℃频率:37500Hz共振干涉法(单位:mm):218.98 213.58 209.20 204.56 199.62 194.92 190.64 185.72 180.62176.52相位比较法(单位:mm):174.60 169.60 164.80 160.68 155.90 151.22 146.28 141.58 136.68131.70共振干涉法:λ相位比较法:λ六、小结(误差分析):通过共振干涉法算出的超声声速为350.560 m/s,通过相位比较法算出的超声声速为354.360 m/s,通过公式求出的应得声速为351.474 m/s。
超声波测距系统的概述从技术上看,超声波测距系统在上个世纪70年代已经实用化,从70 年代末期开始广泛应用于生产领域。
于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。
利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制,并且在测量精度方面能达到工业实用的要求,因此在工农业生产上到了广泛的应用。
2 课题研究背景与意义2.1 课题研究背景超声波是指频率在20kHz 以上的声波,它属于机械波的范畴。
近年来,随着电子测量技术的发展,运用超声波作出精确测量已成可能。
随着经济发展,电子测量技术应用越来越广泛,而超声波测量精确高,成本低,性能稳定则备受青睐。
超声波是指频率在20kHz 以上的声波,它属于机械波的范畴。
超声波也遵循一般机械波在弹性介质中的传播规律,如在介质的分界面处发生反射和折射现象,在进入介质后被介质吸收而发生衰减等。
正是因为具有这些性质,使得超声波可以用于距离的测量中。
随着科技水平的不断提高,超声波测距技术被广泛应用于人们日常工作和生活之中。
一般的超声波测距仪可用于固定物位或液位的测量,适用于建筑物内部、液位高度的测量等。
2.2 课题研究意义由于超声测距是一种非接触检测技术,不受光线、被测对象颜色等的影响,较其它仪器更卫生,更耐潮湿、粉尘、高温、腐蚀气体等恶劣环境,具有少维护、不污染、高可靠、长寿命等特点。
因此可广泛应用于纸业、矿业、电厂、化工业、水处理厂、污水处理厂、农业用水、环保检测、食品(酒业、饮料业、添加剂、食用油、奶制品)、防汛、水文、明渠、空间定位、公路限高等行业中。
可在不同环境中进行距离准确度在线标定,可直接用于水、酒、糖、饮料等液位控制,可进行差值设定,直接显示各种液位罐的液位、料位高度。
因此,超声在空气中测距在特殊环境下有较广泛的应用。
利用超声波检测往往比较迅速、方便、计算简单、易于实现实时控制,并且在测量精度方面能达到工业实用的指标要求,因此为了使移动机器人能够自动躲避障碍物行走,就必须装备测距系统,以使其及时获取距障碍物的位置信息(距离和方向)。
误差理论与数据处理研究性教学课程名称:误差理论与数据处理设计题目:超声波声速测量的误差分析院系:机械与电子控制工程学院班级:测控1103班设计者:晏雯秀(11222086)赵璐(11222079)郑海冰(11222081)朱崇巧(11222084)周杏芳(11222083)指导教师:孙艳华超声波声速测量的误差分析摘要 : 针对学生在超声波声速测量实验中存在的测量数据误差的问题 , 分析了实验中各种可能的误差来源 , 同时也指出了减小误差的相应措施 , 使学生对该实验的误差来源更清楚。
关键词 : 超声波 ; 谐振频率 ; 共振干涉频率 ; 误差声波是在弹性媒质中传播的一种机械波。
对声波特性如频率、声速、波长、声压衰减等的测量是声学应用技术中的主要内容之一。
在物理实验中 ,进行声速测量一般采用的是频率大于 20 kHz以上的超声波。
由于其频率高、波长短 , 所以超声波具有定向好、功率大、穿透力强、信息携带量大、能引起空化作用以及引起许多特殊效应 (如凝聚效应和分离效应 ) 的优点。
在工业、农业、国防、生物医学和科学研究等各个领域存着广泛的应用 ,如超声无损检测、超声波测距和定位、测量气体温度瞬间变化、测液体流速、测材料弹性模量等等。
对声速进行测量 , 在声波定位、探伤、测距等应用中具有重要意义。
超声波声速的测量方法一般有共振干涉法和相位比较法两种 , 本文主要对共振干涉法中的实验误差作简要分析。
一、共振干涉法原理超声波声速的测量公式是v = fλ, 其中 , f为超声波频率 , 等于发射换能器的谐振频率 , 可由频率计直接读出; λ 为本实验所要测量的量 , 为超声波波长。
基本原理是利用频率计输入电压的激发 ,通过逆压电效应 , 使压电陶瓷片处在共振状态 , 使陶瓷体产生机械简谐振动 , 从而发射出简谐超声波。
超声波在空气中传播遇到接收换能器反射面发生反射 , 反射波与入射波叠加形成驻波 , 利用接收换能器对超声波进行接收。
设备点检中需测量的重要参数目前,很多企业都在开展点检、巡检和状态检修方面的工作,点检的主要目的是完整采集、存储、整理、分析设备数据,确诊设备的健康状况,为状态检修提供有用资料。
对于大多数机械设备,主要应采集振动、温度、声学3个方面的重要数据。
1. 点检中的振动数据测量振动是机械设备运行中的重要数据,反映振动的基本参数主要有3个:振幅、相位、频率。
描述振幅有3个物理量:位移、速度、加速度。
为了有效反映机器设备的安危状态,对于工作性质、转速、结构不同的机器,理论上应采用不同的振动物理量描述,例如对于高频或带有较大冲击的机器用加速度描述较合理;相反,对于转速较低、无明显冲击的机器,应采用振动位移来描述。
但长期以来全部沿用振动位移描述机器设备振动的大小,主要有下列原因:(1)由于有些设备(如汽轮发电机组)动静间隙很小,为避免振动过大发生动静碰摩,采用振动位移限制振动较采用速度、加速度有效。
(2)支承动刚度一定时,振动位移是转子不平衡力的单值函数,因而采用位移作为转子平衡重量计算依据较采用速度有效。
(3)故障诊断经验证明,采用振动位移描述故障特征和现象,较采用振动速度容易和直观。
(4)由于测量振动的历史原因。
期的振动测量技术,测量位移较测量速度、加速度容易,因此对振动位移建立了明确的直观概念。
尽管目前测量振动速度较测量位移容易实现,但由于上述3个原因,在目前机组振动测量、故障诊断、振动状态评价中有时虽也有采用振动烈度(速度均方根值),但没有振动位移使用得广泛。
因此对于点检仪来说,测量振动的位移必不可少,对于电厂复杂的机械设备,测量振动的速度、加速度也很有必要。
同时仪器必须有足够的频率响应范围,以满足不同转速机械使用,测量时振动数值一定要稳定。
振动频谱和相位在进行故障诊断时才具有实际意义,点检仪中相位测量和频谱分析一般没有必要。
点检仪的振动测量部分与点检仪器应整体校验,测量部分能全内置最好,有些厂家采用外配振动传感器到点检仪中,导致测量振动时传感器和点检仪测量功能不能同时校验,造成较大误差,因此,在选择点检仪时必须注意这个问题。
超声波声强测量的原理
超声波声强测量的原理是利用超声波的传播和接收过程中的声强变化来进行测量。
具体原理如下:
1. 产生超声波:通过压电材料或磁致伸缩材料产生高频振动,从而产生超声波。
常用的超声波频率为1MHz至10MHz。
2. 超声波传播:超声波通过介质传播,在传播过程中会与介质中的杂质、缺陷或界面发生反射、散射和吸收。
3. 接收超声波:在声源发出的超声波传播到被测物体后,部分超声波会被目标物体吸收或反射回来。
接收器接收到反射或散射回来的超声波信号。
4. 检测信号:接收到的超声波信号通过放大、滤波等处理,然后转化为电信号进行处理。
5. 声强分析:通过对接收到的超声波信号进行声波分析,包括声波的幅度、波形、频率等信息。
6. 声强测量:根据声波信号的幅度,即声强的大小,来判断被测物体的特性,如材料的质量、缺陷的大小、位置等。
总结起来,超声波声强测量的原理是利用超声波的传播和接收过程中的声强变化来判断被测物体的特性。
实验四十 超 声 波 波 速 测 量声波是一种在弹性媒质中传播的纵波。
对超声波(频率超过2×104Hz的声波)传播速度的测量在超声波测距、测量气体温度瞬间变化等方面具有重大意义。
超声波在媒质中的传播速度与媒质的特性及状态因素有关。
因而通过媒质中声速的测定,可以了解媒质的特性或状态变化。
例如,测量氯气(气体)、蔗糖(溶液)的浓度、氯丁橡胶乳液的密度以及输油管中不同油品的分界面等等,这些问题都可以通过测定这些物质中的声速来解决。
可见,声速测定在工业生产上具有一定的实用意义。
同时,通过液体中声速的测量,了解水下声纳技术应用的基本概念。
一 实 验 目 的(1)用共振干涉法和相位比较法测量声速。
(2)了解压电陶瓷换能器的功能。
(3)进一步熟悉示波器的使用。
(4)通过用时差法对多种介质的测量,了解声纳技术的原理及其重要的实用意义。
二 实 验 原 理由波动理论得知,声波的传播速度v 与声波频率和波长f λ之间的关系为λf v =。
所以只要测出声波的频率和波长,就可以求出声速。
其中声波频率可由产生声波的电信号发生器的振荡频率读出,波长则可用共振法...和相位比较法.....进行测量。
时差法可通过测量某一定间隔距离声音传播的时间来测量声波的传播速度。
1.压电陶瓷换能器本实验采用压电陶瓷换能器来实现声压..和电压..之间的转换。
它主要由压电陶瓷环片、轻金属铅(做成喇叭形状,增加辐射面积)和重金属(如铁)组成。
压电陶瓷片由多晶体结构的压电材料锆钛酸铅制成。
在压电陶瓷片的两个底面加上正弦交变电压,它就会按正弦规律发生纵向伸缩,从而发出超声波。
同样压电陶瓷可以在声压的作用下把声波信号转化为电信号。
压电陶瓷换能器在声—电转化过程中信号频率保持不变。
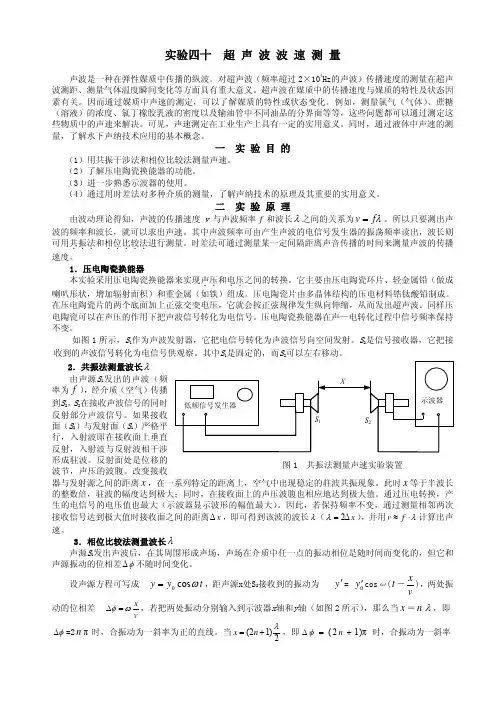
如图1所示,S 1作为声波发射器,它把电信号转化为声波信号向空间发射。
S 2是信号接收器,它把接收到的声波信号转化为电信号供观察。
其中S 1是固定的,而S 2可以左右移动。
超声波传播速度的测量超声波传播速度的测量【教学⽬的】1.学习⽤驻波共振法和相位⽐较法测量超声波在空⽓中的传播速度。
2.了解压电换能器的功能。
3.学习⽤逐差法处理数据。
【教学重点】1. 掌握本实验的原理,熟悉各仪器的使⽤。
2. 能够运⽤驻波共振法和相位⽐较法准确的测出超声波在空⽓中的传播速度。
【教学难点】理解并掌握驻波共振法和相位⽐较法测量超声波在空⽓中的传播速度的原理及⽅法。
【课程讲授】提问:1. 本实验中的超声波是如何获得的?2. 如何利⽤驻波共振法和相位⽐较法测量超声波在空⽓中的传播速度?⼀、实验原理频率介于20Hz ~20kHz 的机械波振动在弹性介质中的传播就形成声波,介于20kHz ~500MHz 的称为超声波,超声波的传播速度就是声波的传播速度,⽽超声波具有波长短,易于定向发射和会聚等优点,声速实验所采⽤的声波频率⼀般都在20KHz ~60kHz 之间。
在此频率范围内,采⽤压电陶瓷换能器作为声波的发射器、接收器、效果最佳。
根据声波各参量之间的关系可知f ?=λυ,其中υ为波速, λ为波长,f 为频率。
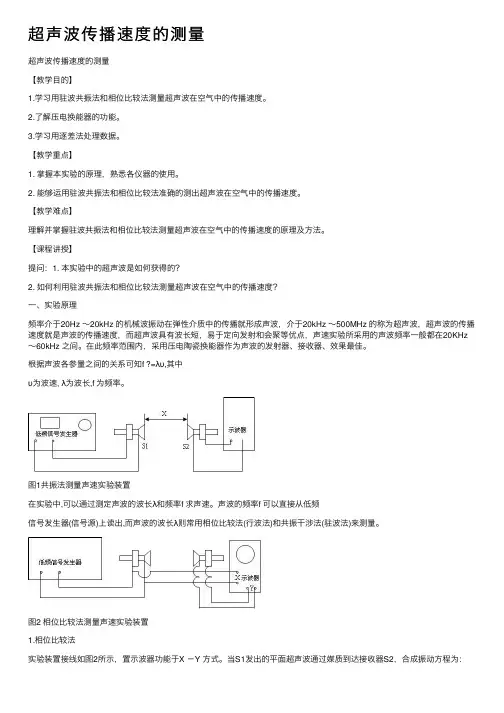
图1共振法测量声速实验装置在实验中,可以通过测定声波的波长λ和频率f 求声速。
声波的频率f 可以直接从低频信号发⽣器(信号源)上读出,⽽声波的波长λ则常⽤相位⽐较法(⾏波法)和共振⼲涉法(驻波法)来测量。
图2 相位⽐较法测量声速实验装置1.相位⽐较法实验装置接线如图2所⽰,置⽰波器功能于X -Y ⽅式。
当S1发出的平⾯超声波通过媒质到达接收器S2,合成振动⽅程为:22见图(a)0=?? (b)4π?=(c)2π?=? (d)43π?=? (e)π?=? 图3 合成振动长λ和频率f ,根据式f ?=λυ即可计算出声⾳传播的速度。
改变S1和S2之间的距离L ,相当于改变了发射波和接收波之间的相位差,荧光屏上的图形也随L 不断变化。
显然,当S1、S2之间距离改变半个波长2/λ=?L ,则??=π。
声波简介声波是一种能在气体、液体和固体中传播的机械波。
根据振动频率的不同,可分为次声波、声波、超声波和微波等。
1) 次声波:振动频率低于l6Hz的机械波。
2) 声波:振动频率在16—20KHz之间的机械波,在这个频率范围内能为人耳所闻。
3) 超声波:高于20KHz的机械波。
超声波测距的方法超声波测距的方法有多种,如相位检测法、声波幅值检测法和渡越时间检测法等。
相位检测法虽然精度高,但检测范围有限; 声波幅值检测法易受反射波的影响。
超声波测距的基本原理超声波发生器在某一时刻发出超声波信号,遇到被测物体后反射回来,被超声波接收器接收到。
只要计算出超声波信号从发射到接收到回波信号的时间,知道在介质中的传播速度,就可以计算出距被测物体的距离:d=s/2=(vt)/2 (1)其中d为被测物到测距仪之间的距离,s为超声波往返通过的路程,v为超声波在介质中的传播速度,t为超声波从发射到接收所用的时间。
超声波在空气中的传播速度为340m/s,则d=s/2=(340t)/2超声波传感器的类别为了研究和利用超声波,人们已经设计和制成了许多超声波发生器。
总体上讲,超声波发生器可以分为两大类:一类是用电器方式产生超声波,一类是用机械方式产生超声波,电器方式包括压电型,磁致伸缩型和电动型等;机械方式有加尔统笛,液哨和气流旋笛等。
它们所产生的超声波的频率,功率和声波特性各不相同,因而用途也各不相同。
目前较为常用的是压电式超声波发生器。
压电式超声波传感器的原理目前,超声波传感器大致可以分为两类:一类是用电气方式产生的超声波,一类是用机械方式产生的超声波。
电气方式包括压电型、磁致伸缩型和电动型等;机械方式有加尔统笛、液哨和气流旋笛等。
它们所产生的超声波的频率、功率和声波特性各不相同,因而用途也各不相同。
在工程中,目前较为常用的是压电式超声波传感器。
压电式超声波传感器实际上是利用压电晶体的谐振来工作的。
压电式超声波发生器的内部有两个压电晶片和一个共振板。
超声波测量原理超声波测量原理是利用声波在介质中传播的特性来测量物体的距离、速度和其他相关参数。
超声波是一种机械波,其频率高于人类听觉的上限20kHz,一般在20kHz到100MHz之间。
超声波测量原理的基本思想是通过发射器发送超声波信号,当这些超声波遇到目标物体后,会发生反射、折射、衍射等现象,然后由接收器接收返回的超声波信号,并通过对信号的测量分析,得到目标物体的相关参数。
超声波测量的工作原理主要包括发射、传播和接收三个部分:1. 发射部分:超声波发射器将电能转化为机械振动能,并通过振动将能量转化为超声波信号。
一般采用压电晶体或磁电晶体作为发射器,通过施加电场或磁场使其振动产生超声波。
2. 传播部分:发射的超声波信号在介质中传播,根据物体的声阻抗不同,一部分超声波被物体吸收,一部分被反射、折射或衍射。
传播过程中要考虑介质的声速、密度等因素的影响,因为声速和密度的不均匀分布会导致超声波的聚焦和散射现象。
3. 接收部分:超声波接收器将来自物体的反射、折射或衍射的超声波信号转换为电信号,一般也使用压电晶体或磁电晶体作为接收器。
接收器将接收到的信号经过放大、滤波等处理后,输入到信号处理系统进行分析。
超声波信号的测量分析可以通过以下几种方式:1. 距离测量:利用超声波信号的发送和接收时间差,可以计算出目标物体与传感器的距离。
根据声速和时间差的关系,可以使用时间差法、频率差法、多普勒效应等方法进行测量。
2. 速度测量:利用超声波信号在介质中的传播速度,可以测量介质的流速、液位、固体密度等参数。
通过测量超声波在介质中传播的时间差,可以计算出速度。
3. 缺陷检测:超声波在物体中的传播过程中,当遇到物体的内部缺陷或界面变化时,会发生反射、散射等现象。
通过检测这些反射、散射信号的特性,可以判断物体是否存在缺陷、界面位置等。
超声波测量原理被广泛应用于工业、医学、科学研究等领域。
在工业领域中,超声波测量可以用于测量液位、流速、厚度等,具有非接触、高精度、快速响应等优点。
液体中超声波声速的测定人耳能听到的声波,其频率在16Hz 到20kHz 范围内。
超过20Hz 的机械波称为超声波。
光通过受超声波扰动的介质时会发生衍射现象,这种现象称为声光效应。
利用声光效应测量超声波在液体中传播速度是声光学领域具有代表性的实验。
一、 实验目的1. 了解超声波的产生方法及超声光栅的原理 2. 测定超声波在液体中的传播速度二、 实验仪器分光计,超声光栅盒,钠光灯,数字频率计,高频振荡器。
三、 实验原理将某些材料(如石英、铌酸锂或锆钛酸铅陶瓷等)的晶体沿一定方向切割成晶片,在其表面上加以交流电压,在交变电场作用下,晶片会产生与外加电压频率相同的机械振动,这种特性称为晶体的反压电效应。
把具有反压电效应的晶片置于液体介质中,当晶片上加的交变电压频率等于晶片的固有频率时,晶片的振动会向周围介质传播出去,就得到了最强的超声波。
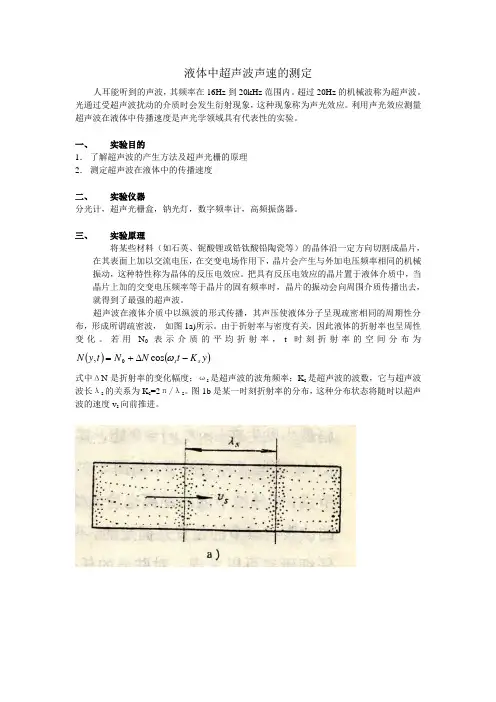
超声波在液体介质中以纵波的形式传播,其声压使液体分子呈现疏密相同的周期性分布,形成所谓疏密波, 如图1a)所示。
由于折射率与密度有关,因此液体的折射率也呈周性变化。
若用N 0表示介质的平均折射率,t 时刻折射率的空间分布为()()y K t N N t y N s s -∆+=ωcos ,0式中ΔN 是折射率的变化幅度;ωs 是超声波的波角频率;K s 是超声波的波数,它与超声波波长λs 的关系为K s =2π/λs 。
图1b 是某一时刻折射率的分布,这种分布状态将随时以超声波的速度v s 向前推进。
图1 密度和折射率呈周期分布如果在超声波前进的方向上垂直放置一表面光滑的金属反射器,那么,到达反射器表面的超声波将被反射而沿反向传播。
适当调节反射器与波源之间的距离则可获得一共振驻波(纵驻波)。
设前进波与反射波分别沿y 轴正方向传播,它们的表达式为()y K t A s s -=ωξcos 1()y K t A s s +=ωξcos 2其合成波为()()y K t A y K t A s s s s +=+-=+=ωξωξξξcos cos 121利用三角关系可以求出t y K A s s ωξcos cos 2=此式就是驻波的表达式。
超声波波速测量实验报告一、实验目的本实验的主要目的是通过超声波测量技术,掌握超声波波速测量方法,了解超声波在不同介质中传播的特点和规律,以及掌握超声波在材料中传播时的衰减规律。
二、实验原理1. 超声波测量原理超声波是指频率高于人类听觉范围(20Hz ~ 20kHz)的机械振动波。
当超声波在介质中传播时,会受到介质密度、弹性模量等物理参数的影响。
因此,在不同介质中传播时,其传播速度也会发生变化。
根据超声波在介质中传播的特点和规律,可以通过测量其在不同介质中的传播时间和路径长度来计算出其传播速度。
2. 超声波衰减原理当超声波在材料中传播时,由于材料内部存在着各种缺陷和微小孔隙等结构,因此会受到能量损失和衰减。
这种能量损失和衰减就称为超声波衰减。
根据超声波在材料中传播时的衰减规律,可以通过测量超声波在材料中的传播距离和衰减程度来计算出材料的衰减系数。
三、实验器材1. 超声波测量仪2. 超声波探头3. 不同介质(如水、玻璃、金属等)4. 不同材料(如铝板、钢板等)四、实验步骤1. 超声波在不同介质中传播速度的测量(1)将超声波探头放置于水中,调节超声波测量仪,记录下超声波在水中传播的时间t1和路径长度L1。
(2)将超声波探头放置于玻璃中,调节超声波测量仪,记录下超声波在玻璃中传播的时间t2和路径长度L2。
(3)将超声波探头放置于金属中,调节超声波测量仪,记录下超声波在金属中传播的时间t3和路径长度L3。
(4)根据上述数据计算出水、玻璃和金属中超声波的传播速度,并进行比较分析。
2. 超声波单程衰减系数的测量(1)将铝板放置于水中,调节超声波测量仪,记录下超声波在铝板中传播的时间t4和路径长度L4。
(2)将钢板放置于水中,调节超声波测量仪,记录下超声波在钢板中传播的时间t5和路径长度L5。
(3)根据上述数据计算出铝板和钢板的超声波单程衰减系数,并进行比较分析。
五、实验结果1. 超声波在不同介质中传播速度的测量结果介质 | 时间t/s | 路径长度L/m | 传播速度v/m·s^-1-|-|-|-水 | 0.0008 | 0.02 | 2500玻璃 | 0.0012 | 0.03 | 2500金属 | 0.0006 | 0.015 | 25002. 超声波单程衰减系数的测量结果材料 | 时间t/s | 路径长度L/m | 衰减系数α/dB·cm^-1-|-|-|-铝板 | 0.0012 | 0.03 | 1.5钢板 | 0.0018 | 0.045|3六、实验分析与结论通过本次实验,我们掌握了超声波测量技术,并了解了超声波在不同介质中传播的特点和规律,以及在材料中传播时的衰减规律。
超声波测量方法超声波测量方法一、一般测量方法:1、(1)在一点处用探头进行两次测厚,在两次测量中探头的分割面要互为90,取较小值为被测工件厚度值。
(2)30mm多点测量法:当测量值不稳定时,以一个测定点为中心,在直径约30mm的圆内进行多次测量,取最小值为被测工件厚度值。
2、精确测量法:在规定的测量点四周增加测量数目,厚度变化用等厚线表示。
3、连续测量法:用单点测量法沿指定路线连续测量,间隔不大于5mm。
4、网格测量法:在指定区域划上网格,按点测厚记录。
此方法在尿素高压设备、不锈钢衬里腐蚀监测中广泛使用。
二、超声波测厚示值失真缘由分析:超声波测厚在实际应用中,尤其是在役设备的监测中,假如消失示值失真,偏离实际厚度的现象,结果造成管线(设备)隐患存在,就是依据错误的数据更换了管件,造成大量材料铺张。
依据我公司几年来超声波测厚的跟踪使用状况,将示值失真现象及缘由分析如下:1、无示值显示或示值闪耀不稳缘由分析:这种现象在现场设备和管道检测中时常消失,经过大量现象和数据分析,归纳缘由如下:(1)工件表面粗糙度过大,造成探头与接触面耦合效果差,反射回波低,甚至无法接收到回波信号。
在役设备、管道大部分是表面锈蚀,耦合效果极差。
(2)工件曲率半径太小,尤其是小径管测厚时,因常用探头表面为平面,与曲面接触为点接触或线接触,声强透射率低(耦合不好)。
(3)检测面与底面不平行,声波遇究竟面产生散射,探头无法接受究竟波信号。
(4)铸件、奥氏体钢因组织不匀称或晶粒粗大,超声波在其中穿过时产生严峻的散射衰减,被散射的超声波沿着简单的路径传播,有可能使回波湮没,造成不显示。
(5)探头接触面有肯定磨损。
常用测厚探头表面为丙烯树脂,长期使用会使其表面粗糙度嶒加,导致灵敏度下降,从而造成不显示或闪耀。
(6)被测物背面有大量腐蚀坑。
由于被测物另一面有锈斑、腐蚀凹坑,造成声波衰减,导致读数无规章变化,在极端状况下甚至无读数。
2、示值过大或过小缘由分析在实际检测工作中,常常遇到测厚仪示值与设计值(或预期值)相比,明显偏大或偏小,缘由分析如下:(1)被测物体(如管道)内有沉积物,当沉积物与工件声阻抗相差不大时,测厚仪显示值为壁厚加沉积物厚度。
HC-SR04超声波测距模块介绍超声波简介超声波是由机械振动产生的, 可在不同介质中以不同的速度传播, 具有定向性好、能量集中、传输过程中衰减较小、反射能力较强等优点。
超声波传感器可广泛应用于非接触式检测方法,它不受光线、被测物颜色等影响, 对恶劣的工作环境具有一定的适应能力, 因此在水文液位测量、车辆自动导航、物体识别等领域有着广泛的应用。
超声波测距原理超声波测距是通过不断检测超声波发射后遇到障碍物所反射的回波, 从而测出发射和接收回波的时间差Δt , 然后求出距离S 。
在速度v 已知的情况下,距离S 的计算,公式如下:S = vΔt/ 2在空气中,常温下超声波的传播速度是334 米/秒,但其传播速度V 易受空气中温度、湿度、压强等因素的影响,其中受温度的影响较大,如温度每升高1 ℃, 声速增加约0. 6 米/ 秒。
因此在测距精度要求很高的情况下, 应通过温度补偿的方法对传播速度加以校正。
已知现场环境温度T 时, 超声波传播速度V 的计算公式如下:V = 331. 5+0.607T这样, 只要测得超声波发射和接收回波的时间差Δt 以及现场环境温度T,就可以精确计算出发射点到障碍物之间的距离。
HC-SR04超声波测距模块简介HC-SR04超声波测距模块可提供2cm-400cm的非接触式距离感测功能,测距精度可达高到3mm;模块包括超声波发射器、接收器与控制电路。
HC-SR04超声波测距模块实物图HC-SR04超声波测距模块特点1、典型工作用电压:5V2、超小静态工作电流:小于5mA3、感应角度(R3 电阻越大,增益越高,探测角度越大):R3 电阻为392,不大于15 度R3 电阻为472, 不大于30 度4、探测距离(R3 电阻可调节增益,即调节探测距离):R3 电阻为392 2cm-450cmR3 电阻为472 2cm-700cm5、高精度:可达0.3cm6、盲区(2cm)超近HC-SR04超声波测距模块管脚VCC(5V)、 Trig(控制端)、 Echo(接收端)、地(GND)使用方法:控制口发一个10US 以上的高电平,就可以在接收口等待高电平输出。
超声波振子原理
超声波振子是一种利用超声波的振动来实现测量和控制的装置。
它的原理是利用超声波在介质中传播时的反射和折射现象,通过测量超声波的传播时间和强度来确定介质的性质和状态。
超声波是一种频率高于人类听觉范围的声波,其频率通常在20kHz 以上。
超声波在介质中传播时会发生反射和折射现象,这些现象可以用来测量介质的密度、粘度、弹性模量等物理性质。
超声波振子通常由一个发射器和一个接收器组成。
发射器会发出一束超声波,这些超声波会在介质中传播并被接收器接收。
接收器会将接收到的超声波信号转换成电信号,并通过处理电路进行处理和分析。
超声波振子的应用非常广泛,例如在医学领域中,超声波振子可以用来进行超声波检查和诊断,如超声心动图、超声波检查等。
在工业领域中,超声波振子可以用来进行材料的非破坏性检测,如检测焊接质量、管道内部的裂纹等。
超声波振子是一种非常重要的测量和控制装置,它利用超声波的反射和折射现象来测量介质的性质和状态,具有广泛的应用前景。
汽车超声波测量系统名词解析汽车超声波测量系统是一种用于测量汽车物体距离和检测障碍物的新一代技术。
它利用超声波的特性进行测距和探测,通过发送超声波信号并接收回波来计算物体与传感器之间的距离。
在汽车超声波测量系统中,主要包括以下几个核心的组成部分。
1. 超声波发射器:超声波发射器是汽车超声波测量系统的核心部件之一。
它负责产生超声波信号并将其发送到外部环境中。
通常采用压电陶瓷材料作为发射元件,通过施加电压激励使其振动,从而产生超声波信号。
2. 超声波接收器:超声波接收器是汽车超声波测量系统的另一个重要组成部分。
它负责接收反射回来的超声波信号,并将其转化为电信号。
接收器通常由压电陶瓷材料制成,其振动产生的电压信号与接收到的超声波信号相关联。
3. 控制单元:控制单元是汽车超声波测量系统的核心控制部分。
它接收从超声波接收器传递过来的电信号,并通过一系列的处理与计算,得出物体与传感器之间的距离信息。
控制单元还可以根据距离信息进行判断与控制,例如检测道路上的障碍物并发出警报。
4. 显示器:显示器是汽车超声波测量系统的输出设备。
它用于显示测量结果,通常以数字形式展示物体与传感器之间的距离,方便驾驶员实时了解周围环境情况。
显示器通常位于车内仪表盘上,便于驾驶员查看。
5. 车身传感器:车身传感器是汽车超声波测量系统的安装位置。
它们通常安装在汽车的前、后、两侧等位置,用于感知周围的环境和障碍物,并进行超声波测量。
传感器数量和布置位置的不同,可以提供更全面的环境感知和障碍物检测能力。
总结来说,汽车超声波测量系统是一种基于超声波技术的测距与障碍物检测系统。
通过超声波发射器、接收器、控制单元等组成部分的协作,实现对物体与传感器之间距离的测量和周围环境的感知。
这一技术在汽车安全与驾驶辅助系统中具有重要的应用前景,可以提高驾驶安全性和行驶舒适性。
超声波测距的原理
超声波测距是利用超声波的特性来测量物体到测距仪的距离。
超声波是一种频率高于人能听到的声波的声波。
超声波测距的原理是通过发射器发出超声波脉冲,并注意到当超声波在物体表面发生反射时,将会返回到接收器。
测距仪计算从发射到接收超声波之间的时间差,并乘以声波在空气中传播的速度,即可得到物体与测距仪的距离。
测距仪中的发射器一般是一个压电晶体,当加上电流时,晶体会产生振动并发出超声波。
接收器通常是另一个晶体,它可以将接收到的超声波转换成电压信号。
超声波的传播速度通常取决于介质的类型和温度。
在大多数情况下,超声波在空气中的传播速度约为每秒340米,而在水中约为每秒1500米。
超声波测距广泛应用于工业自动化、避障传感器、机器人导航、汽车停车辅助等领域。
它具有测量范围广、测量精度高、无需接触目标物体等优点,并且不受光线、尘埃、颜色等物理因素的影响。