伺服基本原理及伺服选型计算教材
- 格式:ppt
- 大小:3.37 MB
- 文档页数:55
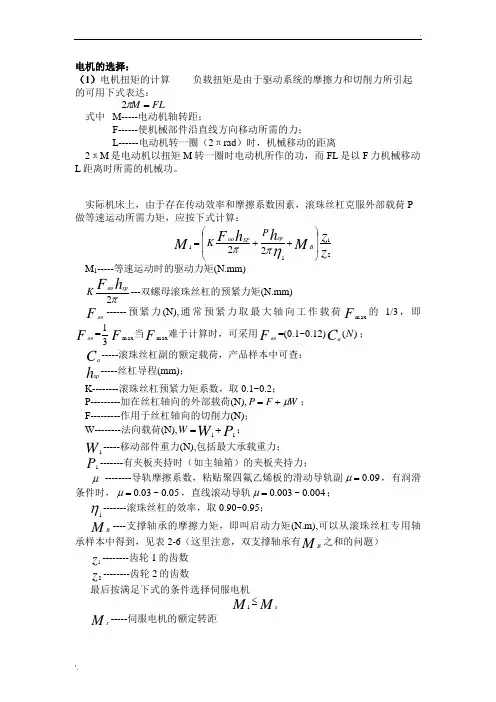
电机的选择:(1)电机扭矩的计算 负载扭矩是由于驱动系统的摩擦力和切削力所引起的可用下式表达: FL M =π2式中 M-----电动机轴转距;F------使机械部件沿直线方向移动所需的力;L------电动机转一圈(2πrad )时,机械移动的距离2πM 是电动机以扭矩M 转一圈时电动机所作的功,而FL 是以F 力机械移动L 距离时所需的机械功。
实际机床上,由于存在传动效率和摩擦系数因素,滚珠丝杠克服外部载荷P 做等速运动所需力矩,应按下式计算:z z M h h F M B spSPao P K 211122⎪⎪⎭⎫ ⎝⎛++=ηππ M 1-----等速运动时的驱动力矩(N.mm)π2hF spao K---双螺母滚珠丝杠的预紧力矩(N.mm) Fao------预紧力(N),通常预紧力取最大轴向工作载荷Fm ax的1/3,即F ao =31F m ax当F m ax 难于计算时,可采用F ao =(0.1~0.12))(N C a ; C a -----滚珠丝杠副的额定载荷,产品样本中可查:hsp-----丝杠导程(mm);K--------滚珠丝杠预紧力矩系数,取0.1~0.2;P---------加在丝杠轴向的外部载荷(N),W F P μ+=; F---------作用于丝杠轴向的切削力(N); W--------法向载荷(N),P W W 11+=;W 1-----移动部件重力(N),包括最大承载重力;P 1-------有夹板夹持时(如主轴箱)的夹板夹持力;μ --------导轨摩擦系数,粘贴聚四氟乙烯板的滑动导轨副09.0=μ,有润滑条件时,05.0~03.0=μ,直线滚动导轨004.0~003.0=μ;η1-------滚珠丝杠的效率,取0.90~0.95;MB----支撑轴承的摩擦力矩,即叫启动力矩(N.m),可以从滚珠丝杠专用轴承样本中得到,见表2-6(这里注意,双支撑轴承有M B 之和的问题)z 1--------齿轮1的齿数 z2--------齿轮2的齿数最后按满足下式的条件选择伺服电机M M s ≤1Ms-----伺服电机的额定转距(2)惯量匹配计算 为使伺服进给系统的进给执行部件具有快速相应能力,必须选用加速能力大的电动机,亦即能够快速响应的电机(如采用大惯量伺服电机),但又不能盲目追求大惯量,否则由于不能从分发挥其加速能力,会不经济的。

伺服电机选型计算实例伺服电机是一种控制器控制的电机,具有高精度和高速度的特点,广泛应用于机械设备中。
在选型伺服电机时,需要考虑多个参数来满足具体的应用要求。
下面以一个选型计算实例来详细介绍伺服电机的选型过程。
假设我们需要选型一台伺服电机用于驱动一个线传动机构,具体要求如下:1.最大负载力为2000N,工作速度范围为0-10m/s。
2. 线传动机构的负载惯量为500kg·m²。
3. 需要保证驱动精度在±0.2mm范围内。
4.工作环境温度范围为0-40℃。
首先,我们需要计算所需的转矩。
根据公式:转矩=负载力×工作半径,其中工作半径等于线传动机构的负载惯量÷2、由于我们没有具体的线传动机构参数,假设负载惯量为500kg·m²,即工作半径为0.25m。
则最大转矩=2000N×0.25m=500N·m。
考虑到一般情况下,峰值转矩为最大转矩的2倍,即1000N·m。
接下来,我们需要计算伺服电机的速度要求。
根据给定的工作速度范围0-10m/s,我们可以选择合适的额定转速。
假设我们选择的额定转速为2000rpm,则转速范围为0-2000rpm。
考虑到加速度和减速度的要求,一般额定转速的选择会略高于平均线速度,假设为2200rpm。
接下来,我们需要选择合适的伺服电机型号。
在选型之前,我们还需要考虑工作环境的温度范围。
根据给定的工作环境温度范围为0-40℃,我们需要选择具备合适温度范围的伺服电机。
一般伺服电机的温度范围为0-50℃,因此我们可以选择标准型号的伺服电机。
在选择伺服电机型号时,我们需要参考厂家提供的电机性能参数。
主要包括额定转矩、额定转速、额定电压、额定电流、额定功率等。
根据我们的要求,我们可以对比不同型号的伺服电机并选择合适的型号。
最后,我们需要根据具体应用需求考虑伺服电机的控制方式、接口类型以及其他附件等。
伺服电机的选型计算办法一、确定负载惯量:负载惯量是指伺服电机需要驱动的负载系统的惯性矩阵。
负载的形状、质量、分布和转动部件的位置等都会影响到负载的惯性矩阵。
1.如果负载是刚体,惯性矩阵可以通过测量负载的质量和尺寸,并进行计算得到。
2.如果负载是连续变形的物体,可以通过将其分为多个刚体部分,分别计算惯性矩阵,再进行合成得到整个负载的惯性矩阵。
二、计算定格转矩和定格转速:1.根据应用的工作周期,计算出所需的平均定格转矩。
定格转矩是指电机在长时间运行情况下,能够稳定输出的转矩。
2.根据应用的工作周期和速度要求,计算出所需的平均定格转速。
定格转速是指电机能够稳定运行的最大转速。
三、选择电机型号:1.根据定格转矩和定格转速的要求,查找电机制造商提供的电机规格表,找到满足要求的电机型号。
2.选择电机型号时还需要考虑其他因素,如电机的功率、最大转矩、过载能力、加速度能力等。
根据具体应用的需求进行综合考虑,选取合适的电机型号。
四、校核选型:1.根据选择的电机型号,计算电机的部分负载转矩和转矩脉冲响应时间。
与应用要求进行比较,确保选型的合理性。
2.根据负载惯量和转矩要求,计算伺服电机的加速时间。
与应用的加速要求进行比较,确保选型的合理性。
3.根据电机的定格转矩和转速,计算电机的输出功率。
与应用的功率需求进行比较,确保选型的合理性。
五、其他因素考虑:除了上述的基本选型计算办法外,还需考虑其他因素,例如电机的可靠性、寿命、环境适应性、维护和保养成本等。
总结:伺服电机的选型计算是一个综合考虑电机的转矩、转速、功率和其他性能指标的过程。
根据负载的惯性矩阵、应用的工作周期和速度要求,选择合适的电机型号,并进行校核以确保选型的合理性。
同时,还需要考虑其他因素,如电机的可靠性、寿命和维护成本等。
以上是伺服电机选型计算的一般步骤,具体要根据具体的应用需求来选择,需要结合实际情况进行综合决策。

伺服驱动器原理及选型
伺服驱动器的原理是通过不断与编码器进行反馈,使电机转动到预定
位置,然后根据控制器的信号对其进行调节,以保持稳定的位置或速度。
在控制过程中,伺服驱动器根据编码器的反馈信号来调整输出电流,使电
机按照预定的速度和位置运行。
1.功率要求:根据实际应用的需求确定所需的功率范围。
功率通常以
瓦特(W)或千瓦(KW)为单位表示。
2.控制方式:选择与控制器兼容的控制方式,如模拟控制、数字控制
或通信控制等。
不同的控制方式对应不同的接口标准和协议。
3.控制精度:根据实际应用的需求确定所需的控制精度。
通常以角度、速度或位置差异度量。
4.响应速度:根据实际应用需求确定伺服驱动器的响应速度。
高速应
用需要快速的响应速度,而低速应用则可以选择较慢的响应速度。
5.保护功能:考虑选择具有过载和过热保护功能的伺服驱动器,以保
护电机和驱动器免受损坏。
6.型号和规格:根据实际应用需求选择适当的产品型号和规格。
不同
的厂家和型号有不同的特点和规格,可以根据需求选择合适的产品。
7.成本:最后要考虑价格因素。
根据预算确定合理的价格范围,选择
性价比高的伺服驱动器。
总之,伺服驱动器是实现伺服电机运动控制的关键部件。
在选型时,
需要考虑功率要求、控制方式、控制精度、响应速度、保护功能、型号和
规格以及成本等因素。
根据应用需求选择合适的伺服驱动器可以确保系统的稳定性和性能。
伺服电机选型计算引言伺服电机是一种能够精确控制转速、位置和加速度的电机,广泛应用于工业自动化领域。
为了正确选型伺服电机,需要综合考虑多个因素,如负载特性、所需转动速度、加速度和减速度等。
本文将介绍伺服电机的选型计算方法。
1. 伺服电机基本参数在选型计算之前,首先需要了解伺服电机的基本参数,这些参数对于计算非常重要。
常见的基本参数包括:•额定转矩:伺服电机能够连续输出的最大转矩。
•额定转速:伺服电机在额定负载下能够达到的最高转速。
•道数:伺服电机的反馈器件信号周期数量,通常是脉冲或电压。
•分辨率:伺服电机的转子位置检测精度,通常以脉冲数表示。
2. 负载特性分析选型伺服电机的第一步是分析负载特性。
负载特性包括负载转矩和转动惯量。
可以通过以下公式计算负载转矩:负载转矩 = 工作负载 × 工作半径其中,工作负载是指应用中所需的转矩,工作半径是转轴到工作力点的距离。
转动惯量是指负载物体抵抗转动的惯性,可以通过以下公式计算:转动惯量 = 负载质量 × 负载半径²负载质量是指负载物体的质量,负载半径是转轴到负载质心的距离。
3. 加速度计算在伺服电机选型中,需要考虑加速度和减速度,以确保电机能够在规定的时间内达到所需速度。
加速度的计算公式如下:加速度 = (目标速度 - 初始速度) / 时间其中,目标速度是所需达到的最终速度,初始速度是实际启动时的初始速度。
4. 选型计算有了上述参数和计算公式,可以开始具体的选型计算。
选型计算主要包括以下步骤:1.确定工作负载和工作半径。
2.计算负载转矩和转动惯量。
3.确定加速度和减速度的要求。
4.根据负载转矩和转动惯量,选择能够满足要求的伺服电机。
5.检查是否满足速度要求,如果不满足,可以考虑调整加速度和减速度参数。
在具体计算中,还需要考虑一些额外因素,如安全系数、附加负载等。
结论伺服电机选型计算是一项重要且复杂的任务,需要综合考虑多个因素。
通过合理的选型计算,可以确保伺服电机能够满足工作需求,并提供稳定和可靠的运行。
伺服系统课件伺服系统课件伺服系统是一种广泛应用于各种机械设备中的控制系统,它具有高精度、高可靠性和高响应速度等特点。
在现代工业中,伺服系统被广泛应用于机床、机器人、自动化生产线等领域。
为了更好地理解和掌握伺服系统的原理和应用,许多学校和培训机构都开设了相关的课程,并提供相应的课件。
一、伺服系统的基本原理伺服系统的基本原理是通过对输出信号和反馈信号进行比较,控制执行机构的运动,使其达到预定的位置、速度或力矩。
伺服系统通常由控制器、执行机构和反馈装置组成。
控制器负责接收输入信号,并根据反馈信号进行控制算法的计算,然后输出控制信号给执行机构。
执行机构根据控制信号的变化来调整自身的运动状态。
反馈装置负责采集执行机构的运动信息,并将其反馈给控制器,以便控制器进行调整。
二、伺服系统的应用领域伺服系统在各个领域都有广泛的应用。
在机床领域,伺服系统可以实现高精度的切削加工,提高加工质量和效率。
在机器人领域,伺服系统可以实现机器人的精确定位和运动控制,使机器人能够完成各种复杂的任务。
在自动化生产线领域,伺服系统可以实现产品的高速运输和精确定位,提高生产效率和质量。
三、伺服系统的优势和挑战伺服系统相比于传统的开环控制系统具有许多优势。
首先,伺服系统具有高精度和高可靠性,可以实现对输出位置、速度和力矩的精确控制。
其次,伺服系统具有高响应速度,可以快速调整执行机构的运动状态,适应快速变化的工作环境。
此外,伺服系统还具有较低的能耗和噪音,能够提供更加舒适和安静的工作环境。
然而,伺服系统也面临一些挑战。
首先,伺服系统的设计和调试较为复杂,需要专业的知识和技能。
其次,伺服系统的成本较高,对于一些小型企业和个人来说,可能难以承受。
此外,伺服系统对环境的要求较高,对温度、湿度和电磁干扰等因素都有一定的限制。
四、伺服系统课件的设计和应用为了帮助学生更好地理解和掌握伺服系统的原理和应用,许多学校和培训机构都开设了相关的课程,并提供相应的课件。
伺服驱动器原理及选型伺服驱动器(Servo Drive)是一种用于控制伺服电机运动的电子设备,它可以控制电机的速度、位置和扭矩。
伺服驱动器通常由电源模块、控制模块和功率模块组成。
控制模块接收指令信号,通过功率模块将电源信号转换为适合电机控制的信号,从而控制电机的运动。
伺服驱动器的工作原理基本上可以分为三个步骤:采样、比较和输出。
首先,伺服驱动器会不断采样电机的位置、速度和扭矩信息,以反馈给控制模块。
然后,控制模块会将采样的信息与设定值进行比较,计算出与设定值的误差,并生成相应的控制信号。
最后,控制信号经过功率模块的放大和变换,输出到电机,控制电机的运动。
1.功率:伺服驱动器的功率应根据电机的额定功率来选择,通常应选择与电机额定功率相匹配的伺服驱动器,以确保驱动器能够正常控制电机的运动。
2.控制方式:伺服驱动器的控制方式可以分为位置控制、速度控制和扭矩控制。
根据具体应用的需求,选择合适的控制方式。
3.通讯接口:现代伺服驱动器通常提供多种通讯接口,如RS485、CAN总线、以太网等,以便与上位机或其他设备进行通讯。
根据具体的控制系统要求,选择适合的通讯接口。
4.控制精度:伺服驱动器的控制精度是指驱动器可以实现的最小位置或速度变化,通常以“脉冲当量”来表示,即每个脉冲对应的移动距离或速度增量。
根据应用的需求,选择具有足够控制精度的伺服驱动器。
5.功能扩展:一些高级伺服驱动器还具有一些功能扩展,如过载保护、编码器反馈、故障诊断等。
根据具体的应用需求,选择带有所需功能扩展的伺服驱动器。
6.可靠性和稳定性:伺服驱动器作为控制电机的核心设备,其可靠性和稳定性对于系统的运行至关重要。
选择具有高可靠性和稳定性的品牌和型号的伺服驱动器,以确保系统的正常运行。
总之,选择适合的伺服驱动器需要综合考虑电机的功率、控制方式、通讯接口、控制精度、功能扩展以及可靠性和稳定性等因素,以满足具体应用的需求。