Compax 3简易调试步骤
- 格式:pdf
- 大小:7.41 MB
- 文档页数:50
数控三维钻床PLC程序编辑和调试硕超数控1、熟悉PLC硬件配置及指令系统不同型号PLC具有不同的硬件组成和性能指标。
它们的基本I/O点数和扩展范围、程序存储容量往往差别很大。
因此,在PLC程序设计之前,要对所用PLC型号,硬件配置(如内装型PLC是否要增加I/O板,通用型PLC是否要增加I/O模板等)作出选择。
对PLC的性能指标主要考虑输进/输出点数和存储容量。
另外,所选择PLC的处理时间、指令功能、定时器、计数器、内部继电器的技术规格、数目等指标也应满足要求。
2、制作接口信号文件需要设计和编制的接口技术文件有:输进和输出信号电路原理图、地址表、PLC数据表。
这些文件是制作PLC程序不可缺少的技术资料。
梯形图中所用到的所有内部和外部信号、信号地址、名称、传输方向,与功能指令有关的设定数据,与信号有关的电器元件等都反映在这些文件中。
编制文件的职员除需要把握所用CNC装置和PLC控制器的技术性能外,还需要具有一定的电气设计知识。
3、绘制梯形图梯形图逻辑控制顺序的设计,从手工绘制梯形图开始。
在绘制过程中,设计员可以在仔细分析机床工作原理或动作顺序的基础上,用流程图、时序图等描述信号与机床运动时间的逻辑顺序关系,然后据此设计梯形图的控制关系顺序。
在梯形图中,要用大量的输进触点符号。
设计员应搞清输进信号为“1”和“0”状态的关系。
若外部信号触点是常开触点,当触点动作时(即闭合),则输进信号为“1”,若信号触点是常闭触点,当触点动作时(即打开),则输进信号为“0”。
一个设计得好的梯形图除要满足机床控制的要求外,还应具有最少的步数、最短的顺序处理时间和易于理解的逻辑关系。
4、用编程机编制PLC程序手工绘制的梯形图,可先转换成指令表的形式,再用键盘输进程编机进行修改。
假如设计员对程编机比较熟悉,且具有一定的PLC程序设计知识,也可省往手工绘制梯形图这一步,直接在编程机上编制梯形图程序。
由于程编机具有丰富的编辑功能,可以很方便地实现程序的显示、输进、输出、存储等操纵。
CP340初始调试步骤入门指南
1、准备好所需的工具和组件
(1)PICMCU:PIC16F887;
(2)PICkit 3:将其与电脑的USB接口相连;
(3)MPLABXIDE:将其安装到本地电脑;
(4)XC8编译器:用于将代码编译为可烧写到PIC16F887的可执行文件;
(5)C18库:用于操作PIC16F887的函数库。
2、选择开发环境
首先,我们必须在MPLABXIDE环境中创建一个新的项目,将所使用的PIC16F887MCU型号和XC8编译器版本指定好并保存,这样在后续的编程步骤中就不会出现什么错误。
3、设置起始地址
4、编写代码
在这一步骤中,用户使用MPLABXIDE进行编程,将代码写入文本文件中,并使用C18库提供的函数完成PIC16F887所需要的各项操作。
在编程的时候,用户需要确认所使用的PIC16F887型号和工作频率,以确保编程的正确性。
5、编译代码
在编码完成之后,用户使用XC8编译器将代码编译成对应的可执行文件,一般情况下,此可执行文件为HEX格式,用户可以根据自己的需求进行修改,并将其保存为特定的文件类型。
6、烧写代码。
三线性系统校正步骤及流程分析在现代工业生产中,为了确保生产过程的稳定性和产品质量的可靠性,三线性系统校正成为一项必不可少的工作。
本文将对三线性系统校正的步骤和流程进行分析,并探讨其重要性和影响。
一、三线性系统校正的重要性三线性系统校正是指通过校准和调整电子仪器、测量设备和控制系统中的三个关键参数,即零点偏移、满量程和灵敏度,以确保它们输出的准确性和稳定性。
这对于确保工业生产过程的精度、准确性和可重复性至关重要。
只有在准确的测量基础上,我们才能做出准确的决策,并确保产品质量满足标准要求。
二、三线性系统校正步骤1. 准备工作在进行三线性系统校正之前,我们首先要明确校正的目标和要求,并准备好所需的校准设备和参考标准。
同时,要确保被校正的设备处于正常工作状态,并进行相应的前期检查,如电源连接、仪器仪表的功能测试等。
2. 零点校正零点校正是指确定被校正设备在无输入信号时的输出值,通常为零。
为了进行零点校正,我们需要将被校正设备置于未激活状态,检查并调整其输出为零。
这可以通过手动调节或使用校准器具来完成。
3. 满量程校正满量程校正是指确认被校正设备在输入最大值时的输出值,以验证设备的上下限是否准确。
我们需要给设备输入一个已知的最大值信号,并检查其输出是否与预期值相符。
如果不符合要求,我们需要对设备进行相应的调整或修正。
4. 灵敏度校正灵敏度校正是指确定被校正设备对输入信号变化的响应灵敏度。
为了进行灵敏度校正,我们需要改变输入信号的大小,并观察被校正设备的输出变化情况。
如果输出值与输入信号的变化不成比例,我们需要对设备进行调整,以达到所需的灵敏度。
5. 结果评估与记录在完成校正过程后,我们需要评估校正结果的准确性和可靠性。
这可以通过与已知标准进行比较来实现。
同时,需要做好校正结果的记录,包括校准日期、校准人员、使用的设备和校准结果等重要信息。
这些记录对于设备的日常维护和追溯非常重要。
三、三线性系统校正的流程分析三线性系统校正的流程是一个逐步进行、有序、循环往复的过程。
CMA3000操作指南(E1和Ethernet)安立有限公司2008-1-18目录一、仪表介绍二、2M误码测试和语音监听三、以太网测试分析一、仪表介绍1.1 面板按键介绍CMA3000支持触摸屏操作,所以分布在仪表面板上的按键比较少,提高用户对仪表操作的直观性和简易性。
1.2、仪表背面接口布局1.3、仪表左侧接口布局1.4、仪表界面操作说明开启CMA3000以后,在屏幕的上方会显示如下界面,对于各个菜单的主要功能,下面给出简单介绍;USBLAN电话接口串口耳机接口电源接口显示当前的接口状态,可点击显示整个状态 测试前各种接口选择及设置,包括2M ,SDH ,V 接口,以太网等选择测试应用设置,包含信令测试选择,帧中继,自动配置和APS 倒换等测试结果显示,包含测试信息和测试结果列表状态显示,包含物理状态,告警/错误,定位和话务其他各项功能;包含快速应用,存储,系统信息,打印和触摸屏设置等在线的实时帮助1.5 Quick Start 应用选择Misc.-Quick Start,有如下显示,可以选择或存贮已经配置好的测试设置;选择出厂设置调用用户设置保存用户设置1.6 Auto Configure 应用在Application→Auto Configure选择接口选择扫描,在测试信令解码时会经常用到此功能,可以自动扫描出时隙,扫描后按照提示继续操作即可二、2M 测试和语音监听2.1传输BERT 测试传输BERT 测试一般用在当需要使用一根2M 电路前,对它的传输性能进行测试,看是否符合使用的需要。
见下图:连接:对端作环,本端Tx,RxA 分别连至DDF 架。
1) 开机2) 配发送端 TxA(CMA3000因其具备2发2收,同时可以测试2对2M 电路) 选择Interface →2 Mbps →Receiver A ,有如下界面显示 发送端按以下界面设置即可;3) 配置接收端 RxA ,在上图界面中点击Receiver A ,有如下界面显示,LTE EELTE设置可按下面界面完成;4)测试配置,在Application→Measurement→General选择,有如下界面显示*Type Statistics (统计) 间隔时间1 s —12 h*Start Key Action Immediate(即时)或者Start at (用户设置开始时间)*Performance Parameters G.821/G.826/M.2100 (在Edit中选择)*Evaluation Setup 中选择对2M线允许输入错误数量的限制5)在面板上按Start键开始测试,在Result→Result List查看你所关注的结果,用户最关心的是Pattern Errors,如下图显示:如果用户想知道这些Pattern Errors是哪个时间点收到的,可点击柱状图图标(上图中黄色圆圈中区域),在点击Pattern Errors数量(上图中椭圆区域),则会得到如下信息,如下图显示;2.2在线监听语音信号。
西奥DO3000Easy-con门机简单调试奥的斯DO3000Easy-con-TJarless-Con门机调试全系列奥的斯及西奥系列服务器查看故障及清除故障西奥SMART同步机轿厢意外移动测试/抱闸力矩测试说明西奥调试服务器及系统菜单说明培训(上)西奥调试服务器及系统菜单说明培训(中)西奥调试服务器及系统菜单说明培训(下)西奥系列新增UCMP功能故障排查及解决方法西奥SMART井道自学习方法西奥系列功能参数设置(上)西奥系列常见驱动故障及排除方法(上)西奥系列常见驱动故障及排除方法(中)西奥系列常见驱动故障及排除方法(下)西奥系列查看主板故障及驱动故障清除及常见闪烁的信息西奥系列RS32板轿厢通讯板I/O地址设置外呼板I/O地址设置I/O地址取反设置西奥SMART主板端子介绍服务器菜单培训(上)西奥SMART板服务器介绍常用的状态输入输出信号(中)西奥SMART板小键盘介绍说明抱闸力矩检测测试方法西奥系列ALMCB板HAMCB板井道自学习方法步骤西奥SMART板小键盘使用说明菜单西奥系列IO地址设置服务使用介绍西奥系列ALMCB和HAMCB板介绍西奥系列主板数码管显示AL030操作模式说明西奥系列主板数码管显示ER333驱动故障码表西奥SMART主板数码管显示Err63驱动故障码表杭州西奥SMART优耐得UCMP测试方法和故障码西子奥的斯AMCB2板说明及井道自己学习方法一、门机介绍1.RS14板:接收从主板发来的开关门信号,发送给门机。
2.P1接口:门机开关门到位信号输出,发送给轿厢内通讯版(RS32板)拨码:无服务器情况下,用于门机的调试(详见门机说明)。
二、用服务调试门机调试步骤1.M3311,Run comd source更改为02.手动开门到门宽一半位置,输入M332,进行门电机角度识别。
3.输入M334,进行门宽自学习,门机会先关门到位后,在开门到位,最后再关门到位,门机学习结束,如方向不正确可以更改拨码开关1 的位置。
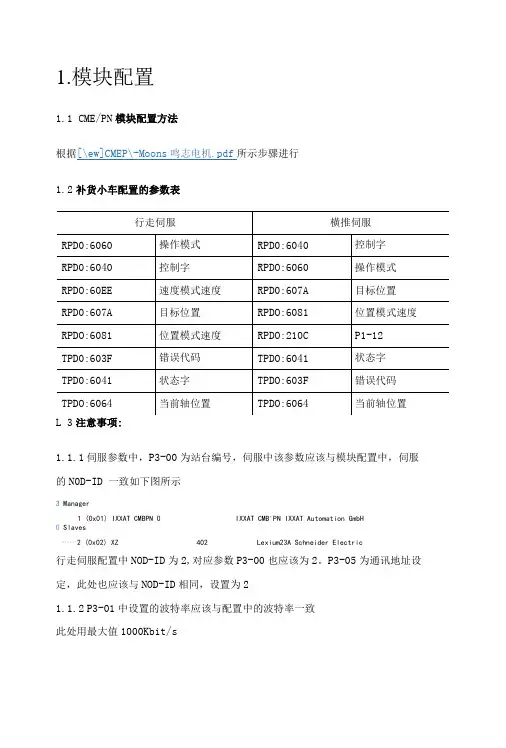
1.模块配置1.1 CME/PN模块配置方法根据[\ew]CMEP\-Moons鸣志电机.pdf所示步骤进行1.2补货小车配置的参数表L 3注意事项:1.1.1伺服参数中,P3-00为站台编号,伺服中该参数应该与模块配置中,伺服的N0D-ID 一致如下图所示3 Manager1 (0x01) IXXAT CMBPN 0 IXXAT CMB'PN IXXAT Automation GmbH0 Slaves……2 (0x02) XZ 402 Lexium23A Schneider Electric行走伺服配置中NOD-ID为2,对应参数P3-00也应该为2。
P3-05为通讯地址设定,此处也应该与NOD-ID相同,设置为21.1.2P3-01中设置的波特率应该与配置中的波特率一致此处用最大值1000Kbit/sNetwork Management Configuration Error Control Configuration ApplicTiming ParametersCANopen Bit Rate:PROFINET Update Time:1.1.3编译之前,必须先将全部PDO均LOCK住PDO Parameters Node-ID 3 (0x03) ▼ 4 XPDO Mapping Parameters回&l & a | < 访All PDOsIndex Sub-Index Size (bit) Parameter Name DenotationS A RPDO1G040 00 16 ControlwordL. 6060 00 8 Modes of operation0 2 RPDO2607A 00 32 Target PositionL... S081 0032 Profile velocity0 fl RPDO3I …210C 00 16 P1-12RPDO4Q 的TPDO1…G041 00 16 StatuswordG03F 00 16 Error CodeL.. G064 0032 Position actual valueTPDO2TPDO3TPDO42伺服变频参数配置详见参数表邵阳补货伺服及变频参数表.X1SX注意:1.上电前先将行走伺服驱动器往电机的输出端拔出。
V3 小盒子的调测步骤和注意事项电脑上请先安装T2000网管及命令行(OptiX Navigator.exe)一、进入机房首先检查设备的安装情况,核查保险容量,2M线的布防等安装工艺。
二、设备加电,设备正常运行后,用命令行登陆本地设备,修改ID为规划的ID,注意电脑的网段为129.9.XX.XX,查询命令为:cm-get-neid修改命定为:cm-set-neid:0x0009----(举例:如果此站点ID规划为2100,首先通过计算器16进制转为0834,这样最终命令行设置应为:cm-set-neid:0x00090834,)等,注意查询和设置的位数一致,采用16进制。
(注意:规划的ID号转换成16进制时,如果生成的不是四位的话,需要在前面加“0”即可)三、打开T2000网管,新建ID为新设置ID的网元,网元名称为ID+站名,注意选择成网关网元,用户名为root,密码为password.四、(若设备未连接尾纤,则省略此步)首先上载网元数据,确认ID为本站ID,设备状态为安状态,然后再在配置数据管理里面初始化网管侧数据。
五、双击设备进行手工配置,查询物理板位,完成校验开工,设备状态变成运行态。
六、进入网元管理器,首先同步网元时间,然后配置光口下支路业务进行2M通断测试,要求100%通断测试,测试完毕后删除临时业务。
七、设置时钟优先级表,增加新时钟源为西向光口。
八、若有公务可进行公务配置。
九、打开15分钟和24小时性能监控。
十、测试光纤收光功率,对接光纤,光口红灯灭为正常,从网管上查询ECC路由,发现有路由及跳数为正常,否则检察光纤是否无光、衰耗过大及鸳鸯线等。
十一、ECC正常后拔掉网线或者切换用户(honet,szhw),电话通知网管中心上载设备,报告ID。
十二、等网管中心通知,清理现场后离开。
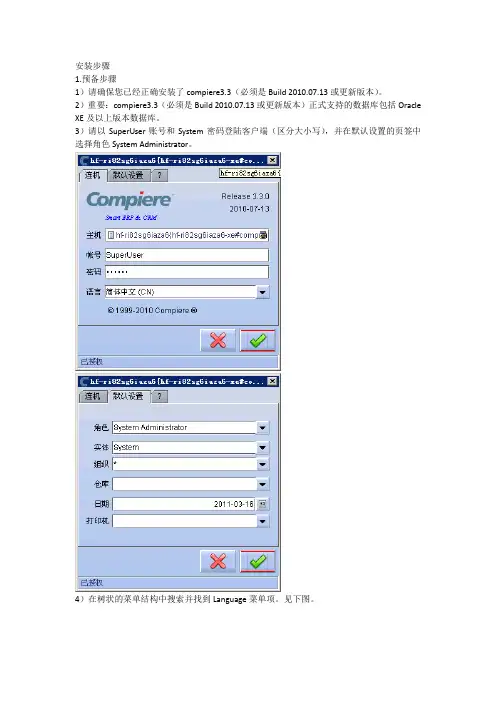
安装步骤1.预备步骤1)请确保您已经正确安装了compiere3.3(必须是Build 2010.07.13或更新版本)。
2)重要:compiere3.3(必须是Build 2010.07.13或更新版本)正式支持的数据库包括Oracle XE及以上版本数据库。
3)请以SuperUser账号和System密码登陆客户端(区分大小写),并在默认设置的页签中选择角色System Administrator。
4)在树状的菜单结构中搜索并找到Language菜单项。
见下图。
5)打开Language窗口。
见下图。
6)请点击工具栏上的查找记录按钮,并在Name条件中输入%China。
见下图。
7)上一步骤点击确认按钮后,会查找到Chinese(China)行。
见下图。
8)选中System Language复选框,然后单击工具栏上的保存按钮。
见下图。
9)点击Language Maintenance按钮。
在弹出的对话框中点击确认按钮。
见下图。
10)在弹出的对话框中,选择默认的Maintenance Mode选项(Add Missing Translations)即可。
点击确认按钮。
见下图。
11)系统开始创建语言包的存放位置,此过程需要数秒,请稍候。
创建完毕后,您会看到窗口状态栏的下列提示。
见下图。
关闭此窗口。
至此,预备步骤执行完毕。
2.准备语言包1)下载compiere3.3中文语言包。
2)将上述Zip文件解压缩到下述目录:%COMPIERE_HOME%\data(例如C:\Compiere2\data)。
您会得到%COMPIERE_HOME%\data\zh_CN(例如C:\Compiere2\data\zh_CN)目录。
至此,准备语言包的步骤执行完毕。
3.安装语言包(系统实体)1)确保当前登录于系统实体中。
提示:以SuperUser账号和System密码登陆客户端(区分大小写)登录时必须选择角色System Administrator。
三协伺服电机的调试步骤(精选)1、初始化参数在接线之前,先初始化参数。
[2]在控制卡上:选好控制方式;将PID 参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
在三协伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V 的控制电压。
2、接线将控制卡断电,连接控制卡与伺服之间的信号线。
以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,电机和控制卡(以及PC )上电。
此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。
用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置3、试方向对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。
通过控制卡打开伺服的使能信号。
这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。
一般控制卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。
如果不能控制,检查模拟量接线及控制方式的参数设置。
确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。
如果电机带有负载,行程有限,不要采用这种方式。
测试不要给过大的电压,建议在1V 以下。
如果方向不一致,可以修改控制卡或电机上的参数,使其一致。
4、抑制零漂在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。
使用控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。
由于零漂本身也有一定的随机性,所以,不必要求电机转速绝对为零。
5、建立闭环控制再次通过控制卡将伺服使能信号放开,在控制卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,如果实在不放心,就输入控制卡能允许的最小值。
处理方法的建立访问数据的查看界面访问数据的查看界面选择“新建(New)”,“处理方法(Processing Method)”命令用鼠标选定一段基线以设定检测峰起用鼠标选定积分区间,点击“下一步”如有必要可设定最小峰面积和最小峰高,然后按“下一步”按“下一步”选择或输入峰(组份)的名字,它们一定要与组份表中组份的名字一致点击“下一命名处理方法,然后按“完成”,可采用如果不用计算机自动计算标准曲线,如果不用计算机自动计算标准曲线简单而快捷的交互式处理方式以上为2D数据的处理 3D数据处理略有不同在“通道(Channels)”标签栏下,选择最低浓度标准样品,然后选“查看(Review)”命令,到查看窗口建立处理方法和处理方法组.选择“提取色谱图(Extract Chromatogram)”命令设定处理波长输入波长数值选择“新建(New)”-“处理方法(Processing Method)”命令选择“使用处理方法向导(Use Processing Method Wizard)”, 然后按确定用鼠标选定最窄峰以设定峰宽,点击“下一步”用鼠标选定一段基线以设定检测峰起点和落点的阈值,点击“下一步”用鼠标选定积分区间,如有必要可设定最小峰面积和最小峰高,然后按“下一按“下一步”点“否”选择或输入峰(组份)的名字,它们一定要与组份表中组份的名字一致点击“下一点击“下一峰纯度测试选“是”,光谱匹配选“否”,然后点“下一步”用鼠标选取一段最平滑的基线设定纯度测试的阈值,这命名处理方法,然后按“完成”回到查看(Review)窗口后选“方法组(Method Set )”命令确认处理方法和波长通道,然后选择“保存”-“方法组(Method Set)”命令命名方法组,然后按“保存”积分到的峰过少–检测阈值太大,应降低阈值 积分到的峰过多–检测阈值太小,应提高阈值 峰落点–降低峰终点峰落点(拖尾)–提高峰终点在“查看”窗口建立处理方法.用“最低浓度”的标准品建立处理方法. 用“处理方法向导”建立一个处理方法. 在线性范围内应用该处理方法修改样品信息以及批处理过程更正样品信息错误输入采集数据时缺少的信息回到“样品组(sample sets)”窗口填标样含量:选中样品组,选“工具(tools)”菜单,点“改变样品Alter Sample”命令。
Cubase SX 3 教程CubaseSX的时代(一)主要窗体预览项目窗体CubaseSX默认打开的主窗体就是这个Project窗体,这种将Project窗体作为一级窗体的窗体安排方式现在似乎是最流行的了,Nuendo,Samplitude的默认打开窗体都称为Project 窗体,虽说LogicAudio的默认打开窗体仍然叫做Arrange,但其实本质上已经和CubaseVST 的Arrange窗体大相径庭了:CubaseVST作为CubaseSX的前身,最不能让人满意的地方就是Arrange窗体的编辑功能过于简单,许多编辑操作都是要深入到二级窗体(双击Arrange 窗体中的音频条或MIDI条而打开的窗体一般称为二级窗体)中,这就给许多的Automation (参数自动化操控)功能带来了极大的不便,毕竟Automation功能的使用都是在调音台和一级界面中完成的。
从这一点上来说,Nuendo作为Steinberg公司曾经的大胆尝试,主窗体已经由Arrange 变为了Project,不要简单的认为这只是命名上的简单变化,其实这里包含着对软件工作方式的再认识。
Arrange窗体曾经的思路是将简单编辑放于该窗体中,在二级甚至三级窗体中才会出现具体的编辑操作,但不得不承认,这种思维模式已经落后了。
现今衡量一款软件是否“时髦”,主要的参考标准就是它的Automation功能,而这个Automation功能的特殊性(需要在回放实时中调整各项包络参数和控制轮参数)使得用户非常渴望直接在主窗体中就将这一系列的控制操作一次完成。
而这个功能最牛的软件,就是LogicAudio,它的各类包络线绘制和控制轮参数设置简直强大到了无以复加。
不过后来Nuendo也作了类似的尝试,并且效果不错,而Samplitude作为一款专注于音频缩混的软件,虽然也采用了Project的窗体模式,但包络绘制功能却是最弱的(在增加包络节点时需要双击,而且不可以绘制连续的包络曲线)。
ICD33LP 用户使用手册1介绍 (2)1.1概述 (2)1.2ICD33LP 的操作环境和功能概括 (3)2ICD33LP 与ICD33的区别 (4)2.1硬件 (4)2.2目标板硬件的支持 (4)2.3调试功能 (4)3ICD33LP 套件说明 (5)3.1检查套件内容 (5)3.2套件内容详细说明 (5)4各部分的名字和功能 (6)4.1控制面板 (6)4.2监控终端 (6)4.2.1BRK IN输入终端 (6)4.2.2复位终端 (6)4.3LEDS (6)4.3.1POWER (power-on LED ,green) (6)4.3.2EMU(emulation LED ,ren) (6)4.4电源支持操作部分 (7)4.4.1电源开关 (7)4.4.2直流电源输入 (7)4.5PC接口 (7)4.6目标板接口 (7)5连接ICD33LP (7)5.1连接DC电缆 (7)5.2连接ICD33LP和主机 (7)5.3连接到目标系统 (8)6开启方法(电源的打开顺序) (9)7目标系统连接测试 (9)1介绍1.1概述ICD33LP是一个简化版的ICD33(In-Circuit Debugger for the E0C33 Family).此工具大大降低了用户的开发成本。
它和ICD33一样用于辅助高效开发,使用S1CC33芯片的调试信号引脚及EPSON提供的软件开发环境(DB33)进行嵌入式系统的开发。
此手册主要解释如何使用ICD33LP及ICD33LP 与ICD33 的区别。
注:1.有关调试程序(db33.exe)的功能和命令的具体细节参见“E0C33 Family C Compiler Package Manual”中的“debugger”.2.有关ICD33 的使用具体细节参见“In-Circuit Debugger(ICD33) Manual”ICD33LP的外观:1.2 ICD33LP 的操作环境和功能概括操作环境在主机上,ICD33LP 使用 IBM PC/AT 或具有串行端口的兼容机。
全自动模式扫描时,扫描出的图片没有空白边。
要使扫描出的图片有空白边且不见有弯卷的书页边请用专业模式扫描调整,此时在目标尺寸处先选“A4”进行预览(目的是能得到预览边框虚线,若直接选“原稿”预览则不会出现预览边框虚线),“A4”预览窗口中见到的预览边框虚线,只能按宽高比例拉伸。
“原稿”预览见到的预览边框虚线能随意拉伸宽高,可调整到没有弯卷的书页边,故再选“原稿”预览,后调整到想要的页面进行扫描。
一、扫描仪部件指南A、扫描仪部件a. 扫描仪文稿盖a. 文稿垫(仅Perfection V330 Photo)b. 文稿台c. 扫描头(在文稿台里边)a. USB接口b. 直流电入口B、指示灯和按钮此扫描仪有四个按钮用于扫描操作。
状态指示灯指示扫描仪操作是否正常a. 电子邮件按钮d. PDF按钮c. 复印按钮d. 电源/启动按钮e. 状态指示灯状态指示灯位于电源/启动按钮和PDF按钮之间。
颜色指示灯状态含义绿色亮准备扫描图像。
闪烁正在初始化或正在扫描。
橙色闪烁发生错误。
有关详细信息,参见状态指示灯闪烁。
(无)灭扫描仪关闭。
按钮功能电源/启动按钮电源如果按下一次可打开扫描仪电源。
当扫描仪电源打开时,按下此按钮3秒钟可关闭扫描仪。
(当扫描软件正在运行时,您不能关闭扫描仪。
)启动Epson Scan启动。
复印Copy Utility启动。
E-mail Epson Scan自动扫描,然后出现传送文件的邮件窗口。
PDF 扫描至PDF窗口出现。
二、扫描仪部件指南A、将文稿和照片放在文稿台上1、打开扫描仪盖2、将原始文稿或照片面朝下放置在扫描仪文稿台上。
确保将文稿或照片放置在文稿台的右下角且与箭头标记对齐。
3、轻轻地合上文稿盖,以免移动原始文稿。
注意:扫描多张照片,请将每张照片与其相邻照片之间至少距离20 毫米(0.8 英寸)放置保持文稿台干净请勿将照片在文稿台上放置过长时间,因为它们可能会粘在玻璃上B、放置大或厚的文稿扫描大的或厚的文稿时,可完全的打开扫描仪的文稿盖,使其平放在扫描仪的旁边1、打开扫描仪盖2、向上笔直地拉出文稿盖3、向下放置文稿盖使其平放在扫描仪的旁边。
EX-3000简易操作说明——(以Au/Ni/Cu为例)一、打开电脑,双击图标,打开EXWIN软件,如图1,提示“进行能谱校正吗?”,点击是。
一般在连续使用两小时后在“校正”菜单下点击“X线能谱校正”,也可选择定时“校正ON/OFF”,间隔一段时间机器自己会做。
图1二、选择“文件”的子菜单“检量线文件(C)”得到图2三、任选一空白处点击得到图3当选择两层的镀层时,会有合金与二层的选择,根据实际镀层情况做适当的选择。
图2手动输入检量线文件名,如Au/Ni/Cu点击 空白处,选择 镀层、底 材,如图4、图5 点击选择孔径,如0.5mm 可输入0~999一般设定60 多用默认值数位式不需要用滤波器滤波器、机器可以自动设定能量多用默认值 图4图3点选需要的元素然后点击即可。
下面就是填写完成的图片四、点击 或者 做六点校正,如图7点击6点校正得到图8,在这里系统会再次提醒“进行能谱校正吗?在这里可以点否。
根据自己标片厚度填写,如镍的是 5.17um,金是0.56um.然后把标准片对应放好,测量六点后,点击 就完成检量线的制作过程,如图10。
图6 图5 图7 图6图8五、检量线完成,又回到初始界面,这时候点击“测量”的子菜单“手动测量(M)”,出现手动测量文件选择界面,如图11点击空白处出现,图12、13,这里是“一般”选项,如下手动输入文件名,用户名、品名、批号测量者。
膜厚值超厚时的数据的处理有两种方式,一是用指定表示的最大值,或不保留数据。
图9 图10图11六、再点击“检量线”选项,得到图14。
在“检量线”对应的空白选择刚才制作的检量线,测量时间可设定1~999秒一般为10秒。
点击 ,放好样品就可以测量了。
图12图14 图13 图15。
C++ builder 2010环境下安装使用MScomm32.ocx控件的方法1、创建一个Package工程文件,保存在应用程序所在的文件夹中。
2、导入ActiveX控件,存入刚才建立的文件夹中。
3、右键单击mscomm.bpl,在弹出菜单中点击Install,实现OCX在C++ builder 2010中的安
装。
弹出消息框不报错,安装完成。
现在在C:\用户\公用\公用文档\RAD Studio\7.0下可看到
在Administrator(用户)\我的文档\RAD Studio\Project\rs232com\mscomm32_package\下可以看到:
4、新建VCL Application,在ActiveX下可以找到安装的mscomm32控件,把该控件拖到Form1
上,开始使用MScomm.ocx控件。
现在保存或编译工程会弹出找不到控件头文件错误,解决方法是在Project/Option增加控件头文件所在目录。
AVL COMPACT 3 简明操作手册山东执信公司目录1仪器简述 (1)2检测项目 (2)3主要参数 (3)4仪器要求 (4)5仪器结构 (5)6安装、停机 (11)7操作规程 (16)8定标 (19)9保养 (20)10附录 (29)1仪器简述∙AVL Compact 3为微型全自动血气分析仪,并配有内置热敏打印机。
∙高度安全设计的进样口和废液液位控制消除了病毒感染的可能性。
∙一次测量只需55微升全血,对新生儿、产妇更为有利。
∙可视的人机对话屏幕更易掌握使用方法。
∙AVL免保养电极使保养变得非常简单。
∙从进样到出结果只需20秒钟,快速简便。
∙在所有同类产品中试剂和定标气消耗最少,保证了长期使用节省费用。
∙精心设计和AVL一贯的高品质相结合保证了仪器的经济、可靠、耐用。
∙具有AVL功能齐备的自诊断程序。
2检测项目AVL Compact 3血气分析仪可测量全血的pH, PCO2和PO2。
pH血清、血浆和全血的pH值是指示其酸碱平衡的重要参数,对血液,肾脏,肺功能的诊断是非常重要的参数,造成血液pH值不正常的原因通常分为:pH<7.4∙原发碳酸氢盐缺乏代谢性酸中毒∙原发肺换气不足呼吸性酸中毒pH>7.4∙原发碳酸氢盐过剩代谢性碱中毒∙原发肺换气过度呼吸性碱中毒血、血清或血浆pH增加(酸血症),可能是由于血浆碳酸氢盐的增加,也可能是CO2排出的增加(过度换气),而出现呼吸性碱中毒的特征。
血、血清或血浆pH降低(酸血症),可能是由于有机酸形成过多,或肾功能失调排出过多H+或过多摄入酸,如:水杨酸中毒或失掉碱性体液。
肺泡换气减少可造成呼吸酸中毒,肺水肿、气管梗阻或药物可使出现急性呼吸酸中毒,梗阻性或约束性的呼吸性疾病可造成慢性呼吸酸中毒。
PCO2动脉血PCO2值用来评价人体排出CO2的能力和CO2的代谢情况。
动脉PCO2低于正常范围表示碱中毒,即低酸血症,这是由于肺泡通气增加,过度换气,动脉PCO高于正常范围表明酸中毒,即高碳酸血,2是肺换气不足的信号,也是心动停止、慢性梗阻性肺部疾病、药物过量、慢性酸碱代谢失调的特征。
Compax 3调试步骤V1.12一软件安装 (2)1伺服驱动器设置软件 (2)2 PLC编程软件 (2)3 CAM编辑软件 (3)4 安装PLC软件的库文件 (3)5 安装帮助文件 (3)二驱动器连线 (3)1 控制电源端口X4 (4)2 电机动力线端口X3 (4)3 驱动器主电源端口X1 (5)4 制动电阻、母线端口X2 (6)5 通讯端口X10 (6)6 电机反馈端口X13 (7)7 模拟量、编码器端口X11 (8)8 数字量端口X12 (8)三伺服驱动器参数设置 (9)1 连线伺服驱动器 (9)2 设置伺服通讯参数 (9)3 设置驱动器参数 (10)3.1 检测驱动器 (10)3.2 驱动器参数设置 (11)3.3 参数优化 (35)3.3.1 察看参数 (36)3.3.2 清除错误 (37)3.3.3试运行模式 (38)3.3.4 负载自整定 (38)3.3.5 示波器 (40)3.3.6 参数修改 (40)3.3.7 察看错误历史 (41)3.3.8 I/O模拟 (41)3.4 保存参数以及上传参数 (42)四PLC程序编写以及调试 (43)1 程序编写 (43)2 程序调试 (43)五CAM(电子凸轮)功能 (50)一软件安装1伺服驱动器设置软件安装SETUP-ParkerIntegratedEngineeringTool-C3MGR2plugin-V2_ 7_2_7_BUILD20080708.exe或者更高版本。
下载地址:/portal/site/PARKER/menuitem.338f315e827b2c6 315731910237ad1ca/?vgnextoid=7d56ce74fa65e210VgnVCM10000048 021dacRCRD&vgnextfmt=EN&vgnextfmt=EN&productcategory=partlis t&vgnextdiv=A87859&vgnextcatid=3208900&vgnextcat=COMPAX3+D OWNLOADS&Wtky=2 PLC编程软件安装codesysv2385.exe或者更高版本。
该软件适用于Compax 3 T30、T40版本。
下载地址:/portal/site/PARKER/menuitem.338f315e827b2c6 315731910237ad1ca/?vgnextoid=7d56ce74fa65e210VgnVCM10000048 021dacRCRD&vgnextfmt=EN&vgnextfmt=EN&productcategory=partlis t&vgnextdiv=A87859&vgnextcatid=3208899&vgnextcat=CODESYS+D OWNLOADS&Wtky=3 CAM编辑软件根据需要安装CAM编辑软件,该软件适用于T40版本。
4 安装PLC软件的库文件在运行中找到[3S software]-[CoDeSys V2.3]-InstallTarget,点击[Open],找到Compax 3.tnf,然后点击[Install]。
该步骤适用于T30、T40版本。
下载地址同Codesys下载地址。
5 安装帮助文件打开ServoManager,选择[?]-[Help],选择所需的帮助文件,并从网上下载帮助文件,或者直接安装已有的Help文件。
二驱动器连线Parker Compax 3伺服驱动器的典型外观如下图,如下详细介绍各接口的具体信息。
通讯口上方的左灯(绿灯)/右灯(红灯)含义如下:绿灯常亮为运行状态;绿灯闪烁表示伺服准备好,但未使能;红灯常亮表示报错。
其中X4-3为硬件使能输入。
2 电机动力线端口X3请注意电机动力线需要采用屏蔽线,PE与电机PE需要对接。
如果电机采用了制动抱闸,则连接BR+和BR-,该连接端子需要套入磁环。
3 驱动器主电源端口X1如上针对单相220V伺服驱动器(V2)。
如上针对三相400V伺服驱动器(V4)。
、母线端口X2制动电阻、4 制动电阻制动电阻的参数需要根据手册来选择合适的阻值和功率。
5 通讯端口X10如上为RS232端口针脚描述。
如上为RS485两线式针脚描述。
如上是RS485四线式针脚描述。
6 电机反馈端口X13如上为旋转变压器反馈,Sincos编码器(Hiperface)以及EnDat 编码器接口的定义。
注:目前F10和F11的硬件是一致的,可以互换。
、编码器端口X11模拟量、7 模拟量8 数字量端口X12三 伺服驱动器参数伺服驱动器参数设置设置1 连线连线伺服驱动器伺服驱动器PC 和Compax 3之间通过RS232接口通讯。
在简易接线方法中,可以采用2,3交叉,5对接的连线方式。
2 设置设置伺服伺服伺服通讯参数通讯参数在伺服参数设置软件C3Mgr2中,选择[Options]-[RS232/RS485 com port setting],选择正确的COM 端口。
3 设置驱动器参数3.1 检测驱动器在[Device selection]-[Online device identification],点击[Click to begin “hardware auto-detect”],并确认替换当前配置。
在[Device selection]-[Device selction wizard]中,点击[Click to start “Hardware setup wizard”]根据驱动器铭牌上的数据确认驱动器型号。
3.2 驱动器参数设置双击[C3S I11 T40 Configuration],开始一步步往下配置:3.2.1 选择电机注意,目标库中只有SMH/MH电机,如果采用SMB/MB系列电机,则相位角相差180度。
此外,可以点击以自定义电机。
需要输入电机的各项必要参数。
3.2.1.1 230V/400V样本中列出了230V/400V电压等级的电机,其中不少电机是同一个电机在不同电压等级下的参数。
例如:SMB1603…230和SMB3003…400这个电机的相间电阻、相间电感、转矩常数是一样的,事实上是同一个电机。
该电机在230V电压等级下额定转速为1600rpm,在400V电压等级下额定转速为3000rpm。
所以如果在电机库中找不到SMB1603…230,选择SMB3003…400也是同样的。
3.2.1.2 SMB/SMH在Compax3对应电机系列为SMH,在电机库中找不到SMB。
SMB 和SMH的主要区别是相位角相差180度。
3.2.1.3 自定义电机当采用SMB电机以及第三方电机的时候需要自定义电机。
3.2.1.3.1 创建电机点击,选择Edit motor library,然后选择Create rotarymotor-Template,点击从现有电机中创建新电机。
以SMB1003006…230为例,因为没有对应的SMH1003006…230电机,所以选择相应的SMH1005606…4,然后点击OK。
3.2.1.3.2 电机命名输入一个合适的电机名称,然后可以添加注释,然后点击Next3.2.1.3.3 输入电机参数如果选择SMB电机,则无需修改电机参数,第三方电机需要根据厂家提供参数输入。
3.2.1.3.4 输入零位角对于SMB电机直接在Commutation angle输入0。
然后点击finish完成电机创建。
对于第三方电机1、点击Automatic setting of commutation parameters,然后将弹出自动寻相窗口。
通常情况下只允许接动力线和反馈线,且不带负载。
点击Next。
2、注意保存之前的文档提示您保存文档,寻相过程中该文件将更新,且会下载特定的配置和程序给驱动器,所以之前的程序需要保存到备份文档中。
备份后点击Next。
3、选择寻相方式如果勾选Discontinuous position feedback,电机将会反复短程慢速的往复运动。
如果运动正常,则将会弹出确认画面。
然后点击Next。
如果没有勾选Discontinuous position feedback,电机将会顺时针或者逆时针转动,需要根据电机运转实际情况,作出正确的选择。
然后点击Next。
4、确认寻相结果将自动弹出寻相结果,然后点击Finish。
然后将自动更新之前的角度、方向等设置,点击Finish完成第三方电机创建。
至此自定义电机完成。
3.2.2 根据需要修改电机部分参数,以及伺服驱动器的PWM频率。
3.2.3 根据实际情况设置制动电阻。
通常,在需要快速制动的场合,需要外加制动电阻。
选择采用的制动电阻型号,或者填入自行定制的制动电阻参数。
3.2.4 设定负载惯量。
该参数也可以通过自整定获得。
如无法确认,可以勾选Externalinertia is unknown: Use default value.3.2.5 设定齿轮比,每圈所移动的行程。
根据负载的类型(直连,减速机,同步带)等填入合适的参数。
比如:电机通过减速比为1:5的减速机带动导程为10mm的丝杆,那么Unit of Travel选择为mm,Travel distance per revolution 设置为10, Travel distance per revolution-Denominator 设置为5。
即电机5圈实现进给10mm。
此时,如果控制电机前进10mm,则电机会自动正向转动5圈。
修改电机默认转向则勾选[Invert motor rotation]3.2.6 设定回零方式可以点击[Homing mode wizard]选择合适的回零方式。
该向导中可以根据回零点开关、极限(反向)开关、电机参考点等来选择合适的回零方式。
回零是运动控制的重要步骤,是精密加工中要求较高的环节。
结合Parker Compax3伺服驱动器的内部回零设置,介绍下常见的回零方式。
Parker Compax3内置了这些回零功能。
1、当前点为回零点用于设定当前点位置,通常设置为0。
2、采用机械参考点外部加接近开关或者行程开关,当接触到下降沿或者其上升沿时,回零完成。
这里需要设置的几个参数是:正向还是反向回零;上升沿还是下降沿回零。
这样就有四种不同的回零方式:以下图为例:19号回零方式意味着启动回零时:如果不在原点处,则正向运行直到碰到原点开关,然后反向运行直到原点开关信号消失(下降沿),完成回零;如果在原点处,则反向运行直到原点开关信号消失。
3、采用机械参考点和极限点在机械参考点回零时,有时候起点位于原点开关与某向极限中,而开机回零方向则往该极限方式,会导致回零无法正常运行,需要碰到该极限时反向运行。