FANUC机器人培训总结
- 格式:doc
- 大小:33.50 KB
- 文档页数:5
机器人培训工作总结
随着科技的不断发展,机器人技术已经成为了现代社会中不可或缺的一部分。
为了更好地适应这一变革,机器人培训工作也变得愈发重要。
在过去的一段时间里,我有幸参与了机器人培训工作,并从中学到了许多宝贵的经验和教训。
首先,机器人培训工作需要不断更新和学习最新的技术和知识。
随着技术的不
断进步,机器人的功能和应用也在不断扩展和改进。
因此,作为机器人培训师,我们需要时刻关注最新的技术发展,不断学习和提升自己的专业知识,以便能够为学员提供最新、最全面的培训内容。
其次,机器人培训工作需要注重实践和案例分析。
理论知识固然重要,但在实
际操作中,往往会遇到各种各样的问题和挑战。
因此,在培训过程中,我们需要注重学员的实际操作能力和解决问题的能力,通过实际案例的分析和讨论,帮助他们更好地理解和掌握机器人技术。
另外,机器人培训工作也需要注重团队合作和交流。
在培训过程中,我们往往
需要和其他培训师、技术人员以及学员们进行密切的合作和交流,共同解决问题、分享经验、提高培训效果。
因此,良好的团队合作和交流能力也是一名优秀的机器人培训师必备的素质。
总的来说,机器人培训工作是一项充满挑战和机遇的工作。
通过不断学习和实践,我们可以不断提升自己的专业能力,为推动机器人技术的发展和应用做出更大的贡献。
希望未来能有更多的人加入到这一领域,共同推动机器人技术的发展和普及。
FANUC机器人培训总结经过一个星期的培训,让我对FANUC机器人有了更深的了解,一下事我在这一周内学到的知识。
一、机器人系统的组成:由机器人、控制柜、系统软件及周边设备组成。
二、坐标介绍:JOINT:J1、J2、J3、J4、J5、J6。
XYZ:WORLD,JGFRM,USER(用户自定义前,该三种坐标位置与方向完全重合)TOOL:三、坐标系设置一、工具坐标系定义:直角坐标系定,定义TCP点的位置和姿态1、缺省设定的工具坐标系的原点位于机器人J6轴的法兰上。
根据需要把工具坐标系的原点移到工作的位置和方向上,该位置叫工具中心点TCP(toolcenterpoint)。
2、工具坐标系的所有测量都是相对于TCP的,用户最多可以设置10个工具坐标系,它被存储于系统变量$MNUTOOLNUM。
3、设置方法三点法六点法直接输入法二、用户坐标系定义:程序中记录所有位置信息的参考坐标系,用户可定义该坐标系。
1、可于任何位置一任何方法设置的坐标系。
2、最多可以设置9个用户坐标系,它被存储于系统变量$MNUFRAME。
3、设置方法三点法四点法直接输入法四、程序的管理一、创建程序1、按select键显示程序目录画面;2、选择f2create(创建);3、移动光标选择程序命名方式,在使用功能键(F1-F5)输入程序名;4、按ENTER键确认。
按F3EDIT进入编辑界面。
二、选择程序1、按SELECT键显示程序目录画面;2、移动光标选中需要的程序;3、按SETER键进入编辑界面。
三、删除程序1、按SELECT键显示程序目录画面;2、移动光标选中要删除的程序名3、按F3DELETE键出现delectok?;4、按F4YES,即可删除所选程序。
四、复制程序1、按SELECT键显示程序目录画面;2、移动光标选中要被复制的程序名;3、若功能键中COPY项,按NEXT键切换功能键内容;4、按F1COPY;5、移动光标选择程序命名方式再使用功能键(F1-F5)输入程序名;6、程序名输入完毕,按ENTER键确认。

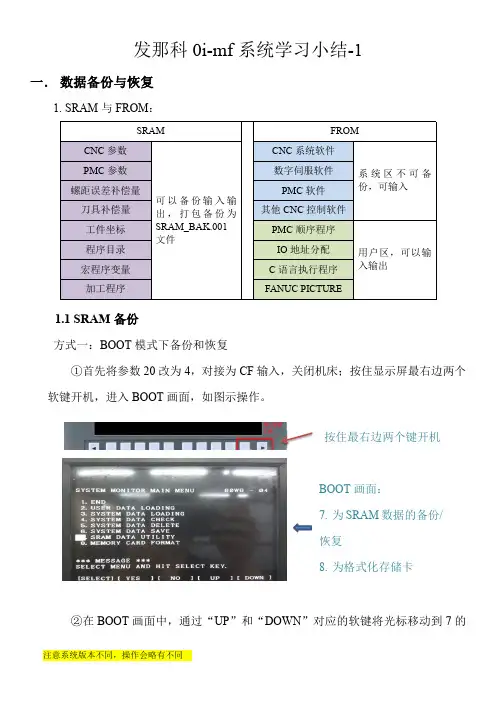
发那科0i-mf 系统学习小结-1一.数据备份与恢复1.SRAM 与FROM :SRAMFROMCNC 参数可以备份输入输出,打包备份为SRAM_BAK.001文件CNC 系统软件系统区不可备份,可输入PMC 参数数字伺服软件螺距误差补偿量PMC 软件刀具补偿量其他CNC 控制软件工件坐标PMC 顺序程序用户区,可以输入输出程序目录IO 地址分配宏程序变量C 语言执行程序加工程序FANUC PICTURE1.1SRAM 备份方式一:BOOT 模式下备份和恢复①首先将参数20改为4,对接为CF 输入,关闭机床;按住显示屏最右边两个软键开机,进入BOOT 画面,如图示操作。
②在BOOT 画面中,通过“UP ”和“DOWN ”对应的软键将光标移动到7的按住最右边两个键开机BOOT 画面:7.为SRAM 数据的备份/恢复8.为格式化存储卡位置,按下“SELECT ”对应的软键选择,按下“yes ”进入SRAM DATA UTILITY 界面,如图示界面显示。
③选择1中的“SRAM BACKUP ”选项,按yes 确定,把机床里面的SRAM 数据备份到CF 卡中,为默认的SRAM_BAK.001文件;当选择2中的“SRAM RESTORE ”选项时,则把CF 卡中的SRAM 备份文件恢复到机床中。
方式二:在所有IO 中备份①同样把参数20改为4,CF 卡模式输入,按下“SYSTEM ”键,按下系统软键的翻页,找到“所有I/O ”界面,如图示界面。
②按下“所有I/O ”,出现了“程序”、“参数”、“刀偏”、“宏程序”等选项,我们可以在此界面备份或恢复这些选项,如备份恢复参数,选择“参数”选项,切换到1.为SRAM 备份2.为SRAM 恢复3.为自动备份与恢复4.为结束翻页键所有I/O“编辑”状态,点击“操作”、点击“输出”,设置名称,点击“执行”即可备份。
③同样如果需要把备份参数从CF 卡恢复参数到机床,在第二步中,选择“输入”选项,选择CF卡的备份参数,点击确定,输入即可恢复。
机器人培训工作总结概述本文旨在总结我在机器人培训工作中的经验和收获。
机器人培训工作是一项需要深入理解机器人技术和有效传授知识的工作,通过培训,我不仅增强了自身的技术能力,还有机会与学员们交流,增进了对人机交互的理解。
以下将结合我的工作实践,从培训内容、教学方法和培训效果三个方面进行详细总结。
培训内容在机器人培训工作中,我主要负责教授学员机器人的基础知识和技术。
为了确保培训的有效性,我首先进行了对目标学员的需求分析。
通过了解学员的背景、学习目标和预期结果,我对培训内容进行了精心策划。
培训内容主要包括以下几个方面:1. 机器人原理与结构:介绍机器人的基本结构和工作原理,使学员对机器人有一个全面的了解。
2. 机器人编程语言:授予学员使用机器人编程语言,如C++和Python,编写程序实现不同的机器人功能。
3. 机器人感知与决策:讲解机器人的感知技术,如视觉、声音和触觉,并教授学员如何通过感知信息做出相应决策。
4. 机器人控制与运动学:培养学员对机器人运动学的理解,教授机器人控制算法和路径规划技术。
通过科学合理的培训内容设置,我成功帮助学员掌握了机器人的基本知识和技能。
教学方法为了提高培训的质量和效果,我在培训中采用了多种教学方法。
首先,我注重理论与实践相结合。
在理论教学的基础上,我为学员提供了大量的实际案例和实验操作,让学员能够通过实践掌握所学知识。
其次,我积极运用互动式教学方法。
在课堂上,我经常与学员进行互动交流,鼓励他们提问和参与讨论。
通过互动,我能够更好地理解学员的困惑和需求,并及时给予解答和指导。
此外,我还鼓励学员进行团队合作。
在机器人培训中,学员往往需要通过团队合作完成一系列的任务和项目。
我组织学员分组,让他们互相合作、互相学习,培养了他们的团队协作能力和创新能力。
通过多种教学方法的应用,我成功提高了培训的效果和学员的参与度。
培训效果通过多次机器人培训的实践,我取得了一系列的成果。
首先,学员的机器人知识和技能得到了显著提升。
FANUC_机器人培训FANUC 机器人培训在当今高度自动化的制造业领域,FANUC 机器人以其卓越的性能和广泛的应用,成为了众多企业提高生产效率和质量的得力助手。
为了能够熟练操作和充分发挥 FANUC 机器人的优势,专业的培训显得尤为重要。
FANUC 机器人培训通常涵盖了丰富的内容,从基础知识到高级应用,旨在为学员提供全面而系统的学习体验。
首先,基础知识部分着重介绍机器人的基本构造和工作原理。
学员需要了解机器人的机械结构,包括关节、连杆、驱动器等,以及电气控制系统,如控制器、传感器等。
通过这部分的学习,能够对机器人的整体运作有一个清晰的概念。
在编程方面,这是培训的核心内容之一。
FANUC 机器人的编程方式多种多样,常见的有示教编程和离线编程。
示教编程是通过手动操作机器人,记录关键位置和动作,然后形成程序。
这种方式直观易懂,适合简单的任务。
离线编程则是在计算机软件中创建机器人的工作场景和动作路径,生成程序后下载到机器人控制器中执行。
离线编程效率较高,适用于复杂的任务和大规模的生产。
操作安全是培训中绝不能忽视的环节。
学员要熟悉各种安全标识和操作规程,了解如何避免机器人运行过程中的潜在危险。
例如,在机器人工作区域设置安全围栏,确保只有授权人员能够进入;在进行机器人维护和调试时,严格按照安全步骤进行操作,防止意外发生。
实际操作环节是将理论知识转化为实际技能的关键步骤。
学员在培训中会有充足的时间在真实的机器人设备上进行操作练习。
从简单的运动控制到复杂的任务执行,逐步提高操作熟练度和准确性。
通过实际操作,学员能够更好地理解机器人的性能特点和编程技巧,同时也能够发现并解决可能出现的问题。
培训过程中,还会涉及到机器人的维护和故障排除。
了解机器人的日常维护要点,如定期检查润滑、清洁、紧固连接件等,可以延长机器人的使用寿命和保证其稳定运行。
而当机器人出现故障时,学员需要学会运用诊断工具和方法,快速准确地找出故障原因,并采取有效的解决措施。
FANUC机器人培训总结经过一个星期的培训,让我对FANUC机器人有了更深的了解,一下事我在这一周内学到的知识。
一、机器人系统的组成:由机器人、控制柜、系统软件及周边设备组成。
二、坐标介绍:JOINT:J1、J2、J3、J4、J5、J6。
X Y Z:WORLD,JGFRM,USER(用户自定义前,该三种坐标位置与方向完全重合)TOOL:三、坐标系设置一、工具坐标系定义:直角坐标系定,定义TCP点的位置和姿态1、缺省设定的工具坐标系的原点位于机器人J6轴的法兰上。
根据需要把工具坐标系的原点移到工作的位置和方向上,该位置叫工具中心点TCP(tool centerpoint)。
2、工具坐标系的所有测量都是相对于TCP的,用户最多可以设置10个工具坐标系,它被存储于系统变量$MNUTOOLNUM。
3、设置方法●三点法●六点法●直接输入法二、用户坐标系定义:程序中记录所有位置信息的参考坐标系,用户可定义该坐标系。
1、可于任何位置一任何方法设置的坐标系。
2、最多可以设置9个用户坐标系,它被存储于系统变量$MNUFRAME。
3、设置方法●三点法●四点法●直接输入法四、程序的管理一、创建程序1、按select键显示程序目录画面;2、选择f2 create(创建);3、移动光标选择程序命名方式,在使用功能键(F1-F5)输入程序名;4、按ENTER键确认。
按F3 EDIT 进入编辑界面。
二、选择程序1、按SELECT键显示程序目录画面;2、移动光标选中需要的程序;3、按SETER 键进入编辑界面。
三、删除程序1、按SELECT 键显示程序目录画面;2、移动光标选中要删除的程序名3、按F3 DELETE 键出现delect ok?;4、按F4 YES ,即可删除所选程序。
四、复制程序1、按SELECT 键显示程序目录画面;2、移动光标选中要被复制的程序名;3、若功能键中COPY 项,按NEXT 键切换功能键内容;4、按F1 COPY ;5、移动光标选择程序命名方式再使用功能键(F1-F5)输入程序名;6、程序名输入完毕,按ENTER 键确认。

机器人培训总结机器人培训总结精选2篇(一)机器人培训总结机器人培训是指通过系统化的教育和训练,提高机器人的智能水平和技能,使其能够更好地完成各种任务。
机器人培训涉及到多个方面,包括机器人的硬件和软件设计、编程、机器人技术和应用的理论基础等。
机器人培训的目的是培养机器人的自主学习和问题解决能力,使其能够适应各种环境和任务的需求。
在机器人培训过程中,需要通过教学、实践和评估等环节不断提高机器人的性能和能力。
此外,还需要结合实际应用场景,培养机器人的操作技巧和应对能力。
在机器人培训中,需要对机器人进行系统的编程和控制,包括控制算法的设计和实现、传感器的数据处理和应用等。
同时,还需要通过机器人技术的理论学习,了解机器人的工作原理、组成结构、运动规律等。
此外,还需要通过实践和实验,加强机器人的操作技能,并了解机器人在不同场景下的应用。
机器人培训的评估是培训过程的重要环节。
通过评估机器人的性能和能力,可以了解培训的效果,并对培训内容和方法进行调整和改进。
评估可以通过测试、观察和实际应用等方式进行,评估结果可以用于指导下一阶段的培训工作。
机器人培训对培训者的要求也比较高。
培训者需要具备深厚的机器人知识和技能,能够熟练运用各种机器人工具和设备,对机器人的工作原理和技术有清晰的认识。
同时,培训者还需要具备良好的教学和指导能力,能够根据培训对象的不同需求,制定相应的培训方案,并有效地传授和讲解知识。
综上所述,机器人培训是一项复杂而系统的工作,需要对机器人进行全面的教育和训练,提高机器人的智能水平和技能。
同时,还需要结合实际应用场景,培养机器人的操作技巧和应对能力。
通过评估机器人的性能和能力,可以了解培训的效果,并对培训内容和方法进行调整和改进。
培训者需要具备深厚的机器人知识和技能,同时还需要具备良好的教学和指导能力。
只有通过全面而系统的培训,机器人才能更好地适应各种任务和环境的需求,实现自主学习和问题解决的能力。
机器人培训总结精选2篇(二)在我学习机器人的过程中,我获得了很多宝贵的经验和见解。
FANUC机器人培训总结经过一个星期的培训,让我对FANUC机器人有了更深的了解,一下事我在这一周内学到的知识。
一、机器人系统的组成:由机器人、控制柜、系统软件及周边设备组成。
二、坐标介绍:JOINT:J1、J2、J3、J4、J5、J6。
X Y Z:WORLD,JGFRM,USER(用户自定义前,该三种坐标位置与方向完全重合TOOL:三、坐标系设置一、工具坐标系定义:直角坐标系定,定义TCP点的位置和姿态1、缺省设定的工具坐标系的原点位于机器人J6轴的法兰上。
根据需要把工具坐标系的原点移到工作的位置和方向上,该位置叫工具中心点TCP(tool centerpoint。
2、工具坐标系的所有测量都是相对于TCP的,用户最多可以设置10个工具坐标系,它被存储于系统变量$MNUTOOLNUM。
3、设置方法●三点法●六点法●直接输入法二、用户坐标系定义:程序中记录所有位置信息的参考坐标系,用户可定义该坐标系。
1、可于任何位置一任何方法设置的坐标系。
2、最多可以设置9个用户坐标系,它被存储于系统变量$MNUFRAME。
3、设置方法●三点法●四点法●直接输入法四、程序的管理一、创建程序1、按select键显示程序目录画面;2、选择f2 create(创建;3、移动光标选择程序命名方式,在使用功能键(F1-F5输入程序名;4、按ENTER键确认。
按F3 EDIT 进入编辑界面。
二、选择程序1、按SELECT键显示程序目录画面;2、移动光标选中需要的程序;3、按SETER 键进入编辑界面。
三、删除程序1、按SELECT 键显示程序目录画面;2、移动光标选中要删除的程序名3、按F3 DELETE 键出现delect ok?;4、按F4 YES ,即可删除所选程序。
四、复制程序1、按SELECT 键显示程序目录画面;2、移动光标选中要被复制的程序名;3、若功能键中COPY 项,按NEXT 键切换功能键内容;4、按F1 COPY ;5、移动光标选择程序命名方式再使用功能键(F1-F5输入程序名;6、程序名输入完毕,按ENTER 键确认。
机器人培训小结怎么写
写机器人培训小结时,可以参考以下内容:
1. 培训简介:简要介绍培训的背景和目的,包括培训的课程、培训机构以及培训时间等。
2. 培训内容:详细描述培训过程中学习的具体内容,包括理论知识和实践操作。
可以列举一些重要的概念、技术或操作步骤,并解释它们在机器人领域中的应用。
3. 学习收获:总结在培训中获得的主要收获,这可能包括对机器人技术的深入理解、新技能的掌握、实践经验的积累等。
可以通过具体的例子来说明自己在哪些方面有所提升。
4. 自我评估:对自己在培训中的表现进行客观的评价,分析自己的优点和不足之处。
可以谈论在学习过程中遇到的困难以及如何克服它们,还可以提及自己在团队合作、解决问题或沟通方面的能力。
5. 应用与展望:讨论如何将培训所学的知识和技能应用到实际工作或学习中。
可以描述一些计划或目标,如何进一步提升自己在机器人领域的能力,以及对未来的发展方向的展望。
6. 培训建议:根据自己的培训体验,提出一些改进建议或意见,这有助于培训机构更好地组织和开展培训课程。
7. 结语:总结培训的重要性和个人的成长,并表达对未来在机器人领域发展的期待。
在撰写小结时,注意语言表达的准确性和流畅性,尽量使用简洁明了的方式进行表述,同时可以适当使用图表或图片来辅助说明,使小结更加生动和直观。
FANUC培训总结FANUC培训总结一、引言1、学习目的和背景2、培训计划和内容概述二、基础知识1、概述1.1、FANUC的特点和应用领域 1.2、的分类和结构1.3、的工作原理2、FANUC的基本构造2.1、的关节结构2.2、的末端执行器和传感器3、编程基础3.1、编程语言简介3.2、编程的基本指令和语法三、FANUC操作指南1、开机和关机操作2、基本运动控制2.1、的坐标系和运动方式2.2、的运动指令和参数设置3、的常用功能和工具操作3.1、程序的编辑与保存3.2、示教运动和示教指令3.3、I/O信号的输入和输出3.4、故障诊断和处理4、安全操作规程和注意事项4.1、操作中的安全隐患及预防措施4.2、事故应急处理方法四、实际操作实践1、示教及程序运行演示2、工作台设备操作3、的故障排查与维护五、培训总结与反馈1、培训效果评估2、学员反馈和建议附件:A: FANUC操作手册B: FANUC编程实例法律名词及注释:1、:根据《定义》(ISO 8373.2012)的规定,是“可编程的、由多个自由度的运动装置连接而成的系统,其目的是承担人力劳动或类似任务。
”2、关节结构:的运动自由度由关节驱动提供,关节结构是指由多个关节连接而成的运动装置。
3、末端执行器:末端的装置,用于完成具体任务,如夹具、工具等。
4、传感器:的感知装置,用于获取外界环境的信息,如视觉传感器、力传感器等。
5、编程语言:用于编写程序的语言,常见的有RSL、TP、KAREL等。
6、示教运动:通过手动操作进行示教,将所需运动轨迹记录下来以便后续的程序运行。
7、I/O信号:通过输入输出端口与外部设备进行信号交互,实现与其他设备的联动。
8、故障排查与维护:当发生故障时,进行故障排查,并采取相应的维护措施,保证正常运行。
发那科弧焊学习心得
这次培训,使我受益匪浅。
学习期间,不但让我深入了解发那科弧焊机器人操作与编程等方面知识及相关理论知识外,而且通过分组讨论、案例分析等教学模式使我更加熟悉与掌握了弧焊机器人在实际生产中的应用以及工艺要求和注意事项,从而提高了自己的专业技术水平和综合素质。
经过这一周时间的系统培训,我有如***会:首先是接触到新知识点或者说对于老师所讲授内容感觉陌生的时候,我们可以先去图书馆查阅资料,或是上网搜索同类问题进行浏览、观看,多思考,只有把概念弄清楚才能理解其他的部分;第二就是当遇到自己难以理解的地方的时候,可以请教老师或者同学帮忙共同解决,要相信每个人都有自己擅长领域,团队之间的互补性往往比个人单打独斗来得快捷有效;最后是一定要勤动手,勤练习。
“眼看千遍,不如手过一遍”,很多东西光靠想象力是无法获取准确结果的。
“百闻不如一见”,真正做到亲身体验一次才算明白透彻。
另外,还需保持虚心好学的态度,对于别人提出的疑问和建议要认真聆听,积极借鉴并融汇贯通运用到自己的工作中。
虽然短暂的三天培训结束了,但这仅仅是一个起点,我将继续努力,再创佳绩!
随着课程的展开,我渐渐被这些神奇又复杂的数字给吸引住了,因为它们代表了现代化的工业,令人叹服,也激励着我们,不断向前奋斗。
其实学习电焊也挺简单的,没什么复杂的东西,只要你多留心多看多记,一定会有成功的那一刻。
这次的培训,我收获良多,最大的收获莫过于我懂得了人际交流的重要性,与同事之间友谊的珍贵,
我也逐步改变了很多不好的坏毛病。
FANUC机器人培训小结五篇范文第一篇:FANUC机器人培训小结FANUC机器人培训总结经过一个星期的培训,让我对FANUC机器人有了更深的了解,一下事我在这一周内学到的知识。
一、机器人系统的组成:由机器人、控制柜、系统软件及周边设备组成。
二、坐标介绍:JOINT:J1、J2、J3、J4、J5、J6。
X Y Z:WORLD,JGFRM,USER(用户自定义前,该三种坐标位置与方向完全重合)TOOL:三、坐标系设置一、工具坐标系定义:直角坐标系定,定义TCP点的位置和姿态1、缺省设定的工具坐标系的原点位于机器人J6轴的法兰上。
根据需要把工具坐标系的原点移到工作的位置和方向上,该位置叫工具中心点TCP(tool centerpoint)。
2、工具坐标系的所有测量都是相对于TCP的,用户最多可以设置10个工具坐标系,它被存储于系统变量$MNUTOOLNUM。
3、设置方法λ三点法λ六点法λ直接输入法二、用户坐标系定义:程序中记录所有位置信息的参考坐标系,用户可定义该坐标系。
1、可于任何位置一任何方法设置的坐标系。
2、最多可以设置9个用户坐标系,它被存储于系统变量$MNUFRAME。
3、设置方法λ三点法λ四点法λ直接输入法四、程序的管理一、创建程序1、按select键显示程序目录画面;2、选择f2 create(创建);3、移动光标选择程序命名方式,在使用功能键(F1-F5)输入程序名;4、按ENTER键确认。
按F3 EDIT 进入编辑界面。
二、选择程序1、按SELECT键显示程序目录画面;2、移动光标选中需要的程序;3、按SETER 键进入编辑界面。
三、删除程序1、按SELECT 键显示程序目录画面;2、移动光标选中要删除的程序名3、按F3 DELETE 键出现 delect ok?;4、按F4 YES,即可删除所选程序。
四、复制程序1、按SELECT 键显示程序目录画面;2、移动光标选中要被复制的程序名;3、若功能键中COPY 项,按NEXT 键切换功能键内容;4、按F1 COPY ;5、移动光标选择程序命名方式再使用功能键(F1-F5)输入程序名;6、程序名输入完毕,按ENTER 键确认。
FANUC机器人培训总结
经过一个星期的培训,让我对FANUC机器人有了更深的了解,一下事我在这一周内学到的知识。
一、机器人系统的组成:
由机器人、控制柜、系统软件及周边设备组成。
二、坐标介绍:
JOINT:J1、J2、J3、J4、J5、J6。
XYZ:WORLD,JGFRM,USER(用户自定义前,该三种坐标位置与方向完全重合)
TOOL:
三、坐标系设置
一、工具坐标系
定义:直角坐标系定,定义TCP点的位置和姿态
1、缺省设定的工具坐标系的原点位于机器人J6轴的法兰上。
根据需要把工具坐标系的原点移到工作的
位置和方向上,该位置叫工具中心点TCP(toolcenterpoint)。
2、工具坐标系的所有测量都是相对于TCP的,用户最多可以设置10个工具坐标系,它被存储于系统变量
$MNUTOOLNUM。
3、设置方法
三点法
六点法
直接输入法
二、用户坐标系
定义:程序中记录所有位置信息的参考坐标系,用户可定义该坐标系。
1、可于任何位置一任何方法设置的坐标系。
2、最多可以设置9个用户坐标系,它被存储于系统变量$MNUFRAME。
3、设置方法
三点法
四点法
四、直接输入法
五、程序的管理
一、创建程序
1、按select键显示程序目录画面;
2、选择f2create(创建);
3、移动光标选择程序命名方式,在使用功能键(F1-F5)输入程序名;
4、按ENTER键确认。
按F3EDIT进入编辑界面。
二、选择程序
1、按SELECT键显示程序目录画面;
2、移动光标选中需要的程序;
3、按SETER键进入编辑界面。
三、删除程序
1、按SELECT键显示程序目录画面;
2、移动光标选中要删除的程序名
3、按F3DELETE键出现delectok?;
4、按F4YES,即可删除所选程序。
四、复制程序
1、按SELECT键显示程序目录画面;
2、移动光标选中要被复制的程序名;
3、若功能键中COPY项,按NEXT键切换功能键内容;
4、按F1COPY;
5、移动光标选择程序命名方式再使用功能键(F1-F5)输入程序名;
6、程序名输入完毕,按ENTER键确认。
会出现copyok?
7、按F4YES键,即可。
五、查看程序属性
1、按SELECT键显示程序目录画面;
2、移动光标选中要查看的程序;
3、若功能键中无DETAIL项,按NEXT键切换功能键内容。
4、按F2DETIL键:
Creationdate:创建日期;
Modificationdate:最近一次编辑的时间;
Copysource:拷贝来源;
Posirions:是否有位置点;
Size:文件大小;
Programname:程序名;
Subtype:子类型;
Comment:注释;
Groupmask:组掩码(定义程序中有哪几组受控制);
Writeprotection:写保护;
Ignorepause:是否忽略pause指令;
Stacksize:堆栈大小;
5、把光标移至需要需要修改的项(只有1-7项可以修改),按EBTER键或按F4CHOICE键进行修
改;
6、修改完毕,按F1END键,回到SELECT界面。
六、运动类型
Joint关节运动
工具在两个指定的点之间任意运动
Linear直线运动
工具在两个指定的点之间沿直线运动
Cicular圆弧运动
工具在三个指定的点之间沿圆弧运动
七、非运动指令
1、寄存器指令registers
2、I/O指令I/O
3、条件指令IF
4、条件选择指令SELECT
5、等待指令WAIT
6、跳转/标签指令JMP/LBL
7、调用指令CALL
8、偏置条件指令OFFSET
9、工具坐标系调用指令UTOOL_NUM
10、用户坐标系调用指令UFRAME_NUM
11、其他指令
六、备份和加载
1、文件的备份/加载设备
R-J3iC控制器可以使用的备份/加载设备:
1)Memorycard(MC)
2)USB
3)PC
2、文件类型
文件事数据在机器人控制柜存储器内的存储单元。
控制柜主要使用的文件类型有:
程序文件(*.TP)
默认的逻辑文件(*.DF)
系统文件(*.SV)用来保存系统设置
I/O配置文件(*.I/O)用来保存I/O配置
数据文件(*.VR)用来保存诸如寄存器数据
3、备份/加载方法的介绍
1)一般模式下的备份/加载
2)控制启动(controlledstart)模式下的备份/加载
3)Image模式下的备份/加载
(一)、一般模式下的备份/加载
A.选择备份加载的设备,按MENU-7FILE-F5UTIL会出现个画面;
B.移动光标选择SETdevice,按ENTER确认。
C.选择menorycard,按ENTER确认。
(二)、格式化存储卡
A.按MENU-7FILE-F5UTIL出现一个画面。
B.移动光标选择FORMAT,按ENTER确认。
C.按F4YES确认格式化,出现一个画面。
D.移动光标选择输入类型,用F1-F5输入卷轴,或直接按ENTER确认。
(三)建立文件夹
A.按MENU-7FLE-F5UTIL出现一个画面。
B.移动光标选择MAKEDIR,按ENTER确认。
会出现另一个画面。
C.移动光标选择输入类型,用F1-F5或数字键输入文件夹名,按ENTER确认,会出现;另一
个画面;
(四)一般模式下加载
A.依次按键操作:MENU-7FILE,会出现一个画面。
B.按F2DIR,显示出另一个画面。
C.移动光标在directorysubset中选择查看的文件类型,选择*.*显示该目录下的所有文件;
D.移动光标,选择要加载的文件;
E.按F3LOAD;
F.屏幕中出现:loadMC:AGMSMS
G.TP?(是否加载文件AGMSMSG.TP?)
G.按F4YES,进行加载。
加载完毕,屏幕显示:loadedMC:AGMSMSG(AGMSMSG文件已经加载完毕)
世上没有一件工作不辛苦,没有一处人事不复杂。
不要随意发脾气,谁都不欠你的。