呼吸机基本波形详解
- 格式:doc
- 大小:259.00 KB
- 文档页数:18




呼吸机波形分析入门引言:呼吸机波形是指通过呼吸机监护系统获得的呼吸机输出的波形图像。
波形图像是由时间作为横轴,压力、流量或体积作为纵轴所构成的图像。
通过对呼吸机波形进行分析可以了解患者的呼吸状况、通气情况以及呼吸机的设置是否合理等。
本文将介绍呼吸机波形的基本分析方法,以帮助初学者快速入门。
一、呼吸机波形的采集和显示常见的呼吸机波形包括压力波形、流量波形和体积波形。
压力波形显示了呼吸机输出的气道压力变化情况,流量波形显示了气体进出肺部的速度变化情况,体积波形显示了肺部的体积变化情况。
在呼吸机波形中,一般以吸气期为正,呼气期为负。
二、呼吸机波形的常见特征1.呼吸频率:通过计算波形上吸气峰值或呼气峰值的数量,可以得到呼吸频率。
常用的方法是计算每分钟的呼吸次数。
2.吸气时间和呼气时间:从吸气峰值到呼气峰值的时间间隔为一个完整的吸呼气周期。
通过计算吸气时间和呼气时间的长短,可以了解患者的通气情况。
3.吸气峰值压力和呼气峰值压力:波形中的压力峰值反映了肺的通气效果,通常情况下,吸气峰值压力应该较呼气峰值压力高。
4.呼气末正压(PEEP):波形中的底线或基线表示了呼气末正压。
PEEP是在呼气末保持气道压力的一种方式,能保持肺泡的开放性,增加氧合和通气效果。
5. 吸气延迟时间(inspiratory delay):吸气波形图中延迟时间指的是吸气流量波形开始上升直到达到吸气峰值的时间。
延迟时间过长可能表明存在气道阻力或机械问题。
三、呼吸机波形的分析方法1.波形形状:通过观察波形的形状可以判断患者的通气状态,如是否存在阻塞或排空障碍等。
正常的吸气波形应该是上升快、下降缓慢的斜坡状。
2.吸气和呼气峰值压力:通过分析吸气和呼气峰值压力的变化,可以判断患者的通气状态。
吸气峰值压力过高可能表明气道阻塞或气道峰压过高,呼气峰值压力过低可能表明肺容积不足。
3.吸气延迟时间:延迟时间过长可能表明存在气管插管位置不当、气道阻力增加或呼吸机设置不当等问题。
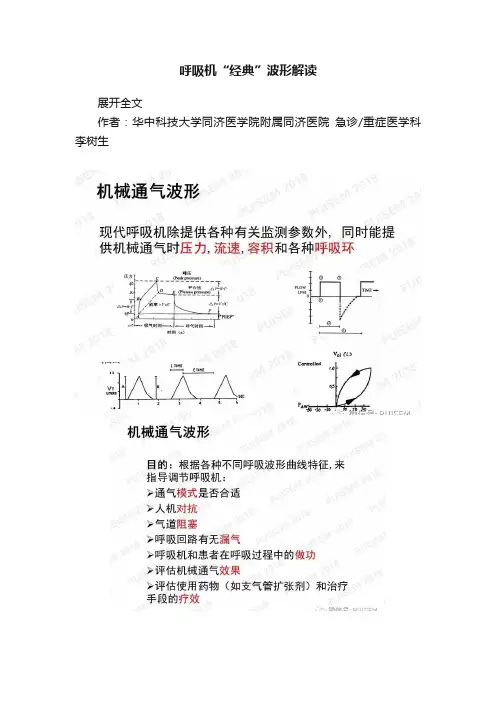
呼吸机“经典”波形解读展开全文作者:华中科技大学同济医学院附属同济医院急诊/重症医学科李树生1、VCV:一个呼吸周期由吸气和呼气所组成, 这两时期均包含有流速相和无流速相.在VCV中吸气期无流速相是无气体进入肺内(即吸气后摒气期), PCV的吸气期始终是有流速相期(无吸气后摒气).压力-时间曲线反映了气道压力(Paw)的逐步变化(图14), 纵轴为气道压力,单位是cmH2O(1cmH2O=0.981mbar), 横轴是时间以秒(sec)为单位,2、PCV:与VCV压力-时间曲线不同, 气道压力在吸气开始时从基线压力(0或PEEP)快速增加至设置的水平呈平台样式,并在呼吸机设定的吸气时间内保持恒定. 在呼气相, 压力下降和VCV一样回复至基线压力水平, 本图基线压力为5cmH2O是医源性PEEP.呼吸回路有泄漏时气道压无法达到预置水平.图中黑影部分是SIMV每个呼吸周期起始段的触发窗, 通常占每个呼吸周期时间的25-60%.在触发窗期间内自主呼吸达到触发灵敏度, 呼吸机即输送一次同步指令通气(即设置的潮气量或吸气峰压), 若无自主呼吸或自主呼吸较弱不能触发时,在触发窗结束时呼吸机自动给一次指令通气.此后在呼吸周期的剩余时间内允许患者自主呼吸, 即使自主呼吸力达到触发阈,呼吸机也不给指令通气, 但可给予一次PS(需预设). 图中笫二、五个周期说明触发窗期巳消逝, 图中虽有向下折返的自主呼吸负压, 但呼吸机给的是指令通气并非同步指令通气. 第一、三、四、六均为在触发窗期内自主呼吸力达到触发阈呼吸机给予一次同步指令通气.压力触发阈=PEEP-Trig.(Sens.)cmH2O,图中PEEP=0压力触发值为负值, 在本图中触发压力虽为负值但未达到触发阈(虚线), 故①和②均为自主呼吸, 吸气负压未触发呼吸机进行辅助正压呼吸, 但③是患者未触发呼吸机是一次指令呼吸.图中是VCV通气时,在A处因吸气流速设置太低, 压力上升速度缓慢, 吸气时间稍长(注意:VCV时不能直接调整压力上升时间), 而B处因设置的吸气流速太大以致在压力曲线出现压力过冲, 且吸气时间也稍短. 结合流速曲线适当调节峰流速即可.在PCV或PSV时, 若压力曲线显示无法达到平台压力, 如图A处显示PCV的吸气时间巳消逝, 但压力曲线始终未出现平台(排除压力上升时间太长因素), 说明呼吸回路有漏气或吸气流速不足(需同时检查流速曲线查明原因). 有的呼吸机因原设计的最大吸气峰流以VCV为基础的指令通气所选择的三种波型(正弦波基本淘汰). 而呼气波形形状基本类同. 本图显示了吸气相的三种波形.在定压型通气(PCV)中目前主要采用递减波左侧为VCV的强制通气,吸气流速的波形可选择为方波,递减波中图为自主呼吸的正弦波, 吸、呼气峰流速比机械通气的正弦波均小得多, 且吸气流速波形态不完全似正弦型.右侧图为压力支持流速波,吸气流速突然下降至0是递减波在吸气过程中吸气流速递减至呼气灵敏度的阈值图中A为指令通气吸气流速波, B为在指令吸气过程中有一次自主呼吸, 在吸气流速波出现切迹, C为人机不同步而使潮气量减少,在吸气流速前有微小呼气流速且在指令吸气近结束时出现自主呼吸,而使呼气流速减少.左侧在设置的吸气过程内吸气流速未降至0, 说明吸气时间不足, 图内虚线的呼气流速开始说明吸气流速巳降至0吸气时间足够,在降至0后持续一短时间在VCV中是吸气后摒气时间.右侧图是PCV(均采用递减波)的吸气时间: 图中(A)是吸气末流速巳降至0说明吸气时间合适且稍长, (注意PCV无吸气后摒气时间). (B)的吸气末流速未降至0,说明吸气时间不足或是自主呼吸的呼气灵敏度巳达标(下述), 只有相应增加吸气时间才能不增加吸气压力情况下使潮气量增加.当呼吸回路中存在泄漏,(如气管插管气束泄漏,NIV面罩漏气,回路连接有泄漏)而流量触发值又小于泄漏速度,在吸气流速曲线的基线(即0升/分)和图形之间的距离(即图中虚形部分)为实际泄漏速度, 此时应立即排除漏气,并在处置完漏气之前适当加大流量触发值以补偿泄漏量(升/分)自主呼吸时当吸气流速降至原峰流速25%或实际吸气流速降至5升/分时, 呼气阀门打开呼吸机切换为呼气. 此流速的临界值即呼气灵敏度. 以往此临界值由厂方固定, 操作者不能调节(图10左侧), 现在有的呼吸机呼气灵敏度可供用户调节(图10右侧). 右侧图A因回路存在泄漏或预设的Esens过低,以致呼吸机持续送气,导致吸气时间过长. B适当地将Esens调高及时切换为呼气,但过高的Esens使切换呼气过早, 无法满足吸气的需要. 故在PSV中Esens需和压力上升时间根据波形结合一起来调节吸气流速选用方波,呼气流速波形在下一个吸气相开始之前呼气末流速未回复到0位,说明有Auto-PEEP(PEEPi)存在. 注意图中的A,B和C其呼气末流速高低不一, B呼气末流速最高,依次为A,C. 在实测Auto-PEEP压力也高低不一.Auto-PEEP是由于平卧位(45岁以上), 呼气时间设置不适当, 采用反比通气或因肺部疾病或肥胖者所引起, 是小气道在呼气过程中过早地陷闭, 以致吸入的潮气量未完全呼出, 使气体阻滞在肺泡内产生正压所致.图中支气管扩张剂治疗前后在呼气流速波上的变化, A代表呼出气的峰流速, B代表从峰流速回复到0位的时间.图右侧治疗后呼气峰流速A增加, 有效呼出时间B缩短, 说明用药后支气管情况改善.横铀为压力有正压(机械通气)、负压(自主呼吸)之分, 纵轴是容积(潮气量Vt),单位为升/次. A代表吸气过程从0(或PEEP)起始上升至预设的吸气峰压(PCV)或预设的潮气量(VCV)后即切换为呼气. B代表呼气过程, 呼气结束理论上应回复至起始点0(或PEEP),但实际上偏离0点, 若使用PEEP如5cmH2O则以正压5cmH2O为起始和回复点(即纵轴右移至5cmH2O).此环说明压力与容积的关系.①=PEEP, ②=气道峰压, ③=平台压, ④=潮气量1、VCV时, P-V环呈逆时钟方向描绘,在吸气中肺被恒定的流速(方波)耒充气,呼吸系统的压力逐步增加至预设潮气量(即气道峰压), 至吸气末肺内压力达到与呼吸系统压力一样水平即平台压.然后开始呼气回复至基线压力(0或PEEP)2、吸气开始压力迅速增至气道峰压水平并在吸气相保持恒定, 呼气起始压力快速下降至起始点, 环的形态似方盒状.P-V环受吸,呼气流速, Vt,频率和患者肌松状态, 系统弹性与粘性阻力变化的影响, 可从吸气肢和呼气肢耒观察.P-V环斜率代表系统动态顺应性.(A至B的虚线即斜率)VCV时静态测定第一、二拐点, 以便设置最佳PEEP和设定避免气压伤或高容积伤, 方法a)使用肌松剂, b)频率 6-8次/分, 吸/比=1:2,c)潮气量为0.8升/次. 发现A点(即笫一拐点LIP)呈似平坦状, 是压力增加但潮气量增加甚少或基本未增加, 此为内源性PEEP(PEEPi),在A点处压力再加上2-4cmH2O为最佳PEEP值. 然后观察B点(即笫二拐点UIP), 在此点压力再增加但潮气量增加甚少, 即为肺过度扩张点, 故各通气参数应选择低于B点(UIP)时的理想气道压力,潮气量等参数.肺气肿患者因弹性纤维的丧失, 故肺是高顺从性的, 且阻力增加,P-V环有点类似PCV时的P-V环, 即使在VCV时肺气肿患者也会出现这种形式的环, 因此一般PEEP以不大于6-8cmH2O为宜.气管痉挛在不同场所其严重程度也不一, 在急诊室丶ICU丶手术室均可遇及这类问题, 甚至在插管或拔管过程中也能发生, 治疗前后通过P-V或F-V环前后对比可立即评估疗效. 图57中①为治疗前气管痉挛, ②为治疗后P-V环偏向纵轴左侧为VCV的吸气流速选方形波, 流速在吸气开始快速增至设置值并保持恒定, 在吸气末降至0, 呼气开始时流速最大, 随后逐步降至基线0点处. 右侧为吸气流速为递减形,与方形波差别在于吸气开始快速升至设置值, 在吸气结速时流速降至为0, 呼气流速无差别.左侧为VCV的吸气流速选方形波, 流速在吸气开始快速增至设置值并保持恒定, 在吸气末降至0, 呼气开始时流速最大, 随后逐步降至基线0点处. 右侧为吸气流速为递减形,与方形波差别在于吸气开始快速升至设置值, 在吸气结速时流速降至为0, 呼气流速无差别.。

呼吸机基本波形详解呼吸机基本波形详解流速测定流速通常在呼吸机环路(从进气口到呼气阀之间的管道)中测知,流量感应器根据设计类型不同而有些许差异,但大部分都可以测量一个较大的范围(-300—+150LPM),但会由于假呼吸运动、水气、呼吸道分泌物等而影响其准确性。
流速波有两个组成部分:吸气波和呼气波,它描述了流速大小、持续时间和机控呼吸下的流速释放方式(正压通气),或者病人自主呼吸下的流速大小,持续时间和流速需求。
我们先介绍机控呼吸的吸气波,然后是自主呼吸的,等掌握了基本原理,再来讨论呼气波形。
吸气流速波——机控呼吸图1是一个假设呼吸机给于恒定流速的一次机控呼吸的吸气流速波(方波),虚线部分是呼气波,我们会在后面介绍图1 吸气流速波——机控呼吸①呼吸机送气开始开始吸气取决于以下两点:1)到达了预设的呼吸周期时间,即“时间循环”2)病人吸气努力达到了触发辅助通气的阈值,通常是一个吸气负压或吸气流速增量,即“病人循环”。
前者常出现在控制呼吸模式,后者常出现于辅助呼吸模式②吸气峰流速在容控性呼吸机上,预设流速是很有必要的,流速设置也可以设置潮气量和吸气时间来间接得到。
假设设置了一个恒定流速的容控性呼吸机(如图一),峰流速就是设置值。
当流速不恒定,即流速波形是曲线波,流速在吸气时不同时间点上表现为不同的值。
此时中间流速或称平均流速通过下式计算:流速(LPM)=[潮气量(L)/时间(S)]X60③吸气末停止送气这个转换可能达到了预期的容量送气、流速、压力或吸气时间④吸气流速的持续时间常与吸气时间相应,容控呼吸机上,吸气时间常取决于预设的潮气量、峰流速和流速释放方式(波型:如递减波),有的也可以直接设置。
因此,吸气时间可以长于峰流速持续时间,尤其当应用吸气暂停时。
⑤整个呼吸周期时间(TCT)取决于预设的呼吸次数 TCT=60/Rate 图1的流速波型是方波,从吸气开始即达到峰值,直到吸气末都是一个恒定值,在实际应用当中,像图1那样“真正的”方波是不可能达到的,因为流速输送系统都有一个固定的延迟时间,在这段时间内,流速从0达到预设的峰流速。
、呼吸机波形--(1)呼吸机波形是指在呼吸机治疗时,显示在呼吸机的显示屏上的呼吸波形图像。
呼吸机波形的形态和变化能够反映病人的呼吸情况,对临床医生进行肺机械通气治疗监测至关重要。
以下是呼吸机波形的相关内容。
一、呼气末正压波形呼气末正压(PEEP)是指在呼气结束时,气道压力保持正值,为肺泡提供持续的正压,有效维持肺泡的开放性,并防止肺塌陷。
呼气末正压波形是指呼吸机在PEEP状态下所显示的波形图像。
呼气末正压波形为一个平滑的水平基线,波形的跳动越小,说明呼吸机的雾化效果越好,PEEP的设置越合适。
二、呼吸机压力波形呼吸机压力波形是指呼吸机将气体注入病人气道内时的压力波形,包括吸气压力波形和呼气压力波形。
呼吸机压力波形的高度和宽度也反映了肺的通气情况。
低的呼吸机压力表示肺容量不足,高的值表示肺活量过大。
优秀的肺机械通气治疗需要医生对呼吸机压力波形的变化有敏锐的感知和正确的处理。
三、呼吸机流量波形呼吸机流量波形是指呼吸机向病人提供气体时的气体流速图像,流速的变化应该与时间成正比例关系。
流量波形的陡峭表示气体流速大,缓慢表示气体流速小。
如果气体流速变化太小,可能会导致患者呼吸时间不足,通气量不足。
四、呼吸机容积波形呼吸机容积波形是指呼吸机向病人提供气体时的每次吸入气体的容积。
患者通气次数高,但吸气时间短,可以增加容积。
呼吸机容积波形的峰值应该在一定范围内,否则会对病人造成一定的损害。
五、呼吸机频率波形呼吸机频率波形是指呼吸机向病人提供气体时,病人每分钟通气的次数。
呼吸机频率波形的变化和呼吸机容积波形同步显示,这种显示方式能够更好地反映患者的通气情况。
以上是呼吸机波形的相关内容,呼吸机波形是临床医生进行肺机械通气治疗监测时的重要依据,同时对于肺机械通气治疗过程的安全和有效起到了重要作用。
呼吸机基本波形详解流速测定流速通常在呼吸机环路(从进气口到呼气阀之间的管道)中测知,流量感应器根据设计类型不同而有些许差异,但大部分都可以测量一个较大的范围(-300—+150LPM),但会由于假呼吸运动、水气、呼吸道分泌物等而影响其准确性。
流速波有两个组成部分:吸气波和呼气波,它描述了流速大小、持续时间和机控呼吸下的流速释放方式(正压通气),或者病人自主呼吸下的流速大小,持续时间和流速需求。
我们先介绍机控呼吸的吸气波,然后是自主呼吸的,等掌握了基本原理,再来讨论呼气波形。
吸气流速波——机控呼吸图1是一个假设呼吸机给于恒定流速的一次机控呼吸的吸气流速波(方波),虚线部分是呼气波,我们会在后面介绍图1 吸气流速波——机控呼吸①呼吸机送气开始开始吸气取决于以下两点:1)到达了预设的呼吸周期时间,即“时间循环”2)病人吸气努力达到了触发辅助通气的阈值,通常是一个吸气负压或吸气流速增量,即“病人循环”。
前者常出现在控制呼吸模式,后者常出现于辅助呼吸模式②吸气峰流速在容控性呼吸机上,预设流速是很有必要的,流速设置也可以设置潮气量和吸气时间来间接得到。
假设设置了一个恒定流速的容控性呼吸机(如图一),峰流速就是设置值。
当流速不恒定,即流速波形是曲线波,流速在吸气时不同时间点上表现为不同的值。
此时中间流速或称平均流速通过下式计算:流速(LPM)=[潮气量(L)/时间(S)]X60 ③吸气末停止送气这个转换可能达到了预期的容量送气、流速、压力或吸气时间④吸气流速的持续时间常与吸气时间相应,容控呼吸机上,吸气时间常取决于预设的潮气量、峰流速和流速释放方式(波型:如递减波),有的也可以直接设置。
因此,吸气时间可以长于峰流速持续时间,尤其当应用吸气暂停时。
⑤整个呼吸周期时间(TCT)取决于预设的呼吸次数 TCT=60/Rate图1的流速波型是方波,从吸气开始即达到峰值,直到吸气末都是一个恒定值,在实际应用当中,像图1那样“真正的”方波是不可能达到的,因为流速输送系统都有一个固定的延迟时间,在这段时间内,流速从0达到预设的峰流速。
同样,在吸气末流速从峰值降至0也需要一段时间。
延迟时间效应会在吸气开始和吸气末使波形出现轻微的倾斜。
(图2)图2 恒流速波形——延迟时间效应在早期低驱动压高内部顺应性的呼吸机,气流输送受到环路回缩力的影响很大,新一代呼吸机设计了低内部顺应性和高驱动压力,使环路回缩力对送气的影响减少了。
在一个较高的吸气峰压下,峰流速逐步减小,会导致吸气时间的延长。
如图3,实线是受环路回缩力影响后的波形,虚线是“真正的”方波,两者包围的面积相同,即潮气量相同。
图3 恒流速波形——受环路回缩力的影响近来,越来越多的新一代容控型呼吸机具备了一些其他可选择的波型,包括递增波、递减波和正弦波(图4),在预设同一个峰流速下,不同的波形会导致吸气时间改变,而曲线包围的面积即潮气量是不变的。
图4 流速波形——可选择波型吸气流速波——自主呼吸自主呼吸流速波形(图5)的特点通常取决于病人呼吸需求的特点。
就是说,波形大小、持续时间与病人的呼吸需求相对应。
此时由于没有预设值,系统响应时间对波形的影响非常小,通常波形类似于正弦波。
(没有使用压力支持等辅助手段)图5吸气流速波——自主呼吸①吸气开始②吸气流速大小③吸气结束④吸气流速持续时间(吸气时间)呼气流速波呼气,不论是机控或是自主呼吸,都是一个被动的过程。
呼气流速波的大小、持续时间、形状取决于顺应性,顺应性包括病人顺应性和呼吸机环路顺应性。
呼吸机环路顺应性受到环路长度、材质、型号(内径)的影响,并且,气流通过呼气阀时的阻力(容量测算系统)也是重要因素。
病人肺顺应性改变或呼气时动用呼吸肌,都会对波形产生影响。
图6是一个机控吸气动作(虚线)后的呼气流速波形。
在呼吸机测算中呼气流速在0基线以下。
图6 呼气流速波①呼气开始②呼气峰流速呼气峰流速在机控呼吸和自主呼吸时是不尽相同的,因为通常机控呼吸潮气量比自主呼吸的大,所以在正压通气下,机控呼吸的呼气峰流速比自主呼吸的要高。
③呼气结束在这个点上于下一个机控吸气相连接,这对于评定吸呼比(I:E)有重要意义,而且此时有产生气道陷闭的可能。
④呼气流速的持续时间与有效呼气时间不同⑤有效呼气时间即整个呼吸周期时间减去实际的吸气时间⑥TCT 整个呼吸周期时间病人呼气阻力对呼气流速波的细小影响会得到修正,而呼气流速波的明显变化常体现了病人顺应性的改变、气道阻力明显变化或是病人烦躁动作。
例如呼气阻力增大(分泌物堆积甚至气道阻塞)会降低呼气峰流速并延长呼气时间(图7)图7 呼气流速波——气道阻力增大了解呼气时间是否延长十分重要。
①阻力增大后,呼气时间超过正常,峰流速下降②呼气不完全,可能引起气道陷闭。
这在后面将进一步讨论而在图8可以发现,如果病人在呼气时动用呼吸肌,会增加呼气峰流速,缩短呼气时间。
观察呼气流速波可帮助确认病人的呼吸需求图8 呼气流速波——被动及主动呼气压力测定呼吸机上,测定压力的部位通常在环路病人端Y形管处,也有在环路吸气支和呼气支内部测知。
尽管从环路内部测得的压力与实际气道压不尽相同,但往往以此作为参照,了解气道压的情况。
压力感应器通常可以测知最高150cmH2O的压力,但会因环路内积水、分泌物堵塞等影响准确性。
自主呼吸和机控呼吸的压力波形是不同的,但他们的组成结构是一样的。
压力波形对评估呼吸周期结构(呼气相向吸气相转换点)、时间系数及病人与呼吸机的相互作用都有帮助。
压力波形观察压力波形,很容易判断病人到底是自主呼吸还是机控呼吸。
图9是一个典型的自主呼吸压力波形。
(未用压力支持等辅助)压力波形——自主呼吸①吸气时压力下降压力下降的幅度取决于病人吸气的峰流速大小,感应器触发灵敏度、以及气流传送系统的反应时间。
(ASSIST、SIMV中自主触发的呼吸或使用压力支持)②呼气时压力升高升高的幅度与呼气时的气流阻力有关,包括病人阻力和环路阻力。
压力大小随着呼气峰流速的变化而相应变化。
呼气时动用呼吸肌,呼气峰流速会增大,因此当病人烦躁或用力呼气时,压力会急剧增高。
此外,持续高流量送气也会导致呼气压力增高。
(图55)图10是一个典型的机控呼吸的压力波形(正压通气)图10 压力波形——机控呼吸①最大膨胀压或称吸气峰压。
它取决于病人及环路的顺应性、阻力,并和潮气量、吸气流速相关②吸气时间③正压持续时间“膨胀压”指达到一个固定潮气量时的压力。
膨胀压分两个部分——流速抵抗压和肺扩张压。
见图11,他表示了机控呼吸中的一次吸气暂停。
(吸气流速结束后,肺保持膨胀的动作)图11 肺膨胀压——吸气暂停①气道峰压受到流速和容量变化影响后,近口端气道的最大压力。
②气道平台压肺泡膨胀时(没有气流进出的情况下)的压力。
肺泡是最低一级的呼吸道单位,最大肺泡压是一个平台压,而不是峰压。
在一个固定的潮气量下,压力波形会随着流速大小、输送方式(方波、正弦波等)、气道阻力、肺顺应性的不同而相应改变。
图12显示在同一潮气量下,气道阻力增大;流速增大;肺顺应性下降时峰压和平台压的不同改变。
图12 压力波形——受阻力、流速、顺应性影响(固定潮气量)测定的“呼气压”其实是呼气是呼吸机环路内的压力,图9、图10分别描述了自主呼吸和机控呼吸的压力波形。
压力从0开始上升直至恢复到0基线,但如果应用了呼气末正压,压力曲线开始和结束都会在预设的PEEP值上。
(图13)也就是说,PEEP抬高了基线。
图13 呼气压基线抬高抬高呼气压基线可以通过调整PEEP或呼气阀实现,也可以由缩短呼气时间,使呼气不完全来达到,但是这样会引起内源性PEEP的产生,并会使呼气末压力逐渐增高。
图14是一个实例。
以后对相关内容会做进一步介绍。
要注意的是,大多数呼气压是在呼吸机环路内测定的,因而小气道动态塌陷引起的呼气末肺泡正压(内源性PEEP),在这种测量方法下是不能探知的。
图14 呼气压力抬高通过调整呼气阀来改变呼气末压力,通常是在呼气支末端加以一定的阻力,即通过限制呼出气流速来实现。
这种方法所得到的压力与呼气流速有关,与阻力阀的横截面积有关。
气流大阻力大,气流小阻力小。
并且会延长呼气时间,增加患者呼气功。
相比较以持续气流实现基线压抬高的方法,后者更为合理,且效果更好。
在ARDS和急性肺水肿的病人治疗中,这种差异尤为明显。
除了膨胀压和呼气压,平均气道压是另一个重要的测量数据。
平均气道压描述了气道平时的平均压力和正压通气对肺泡稳固性及心脏充盈的影响。
平均压受峰压和PEEP的影响,并与I:E有关。
在两种呼吸状况同时存在的情况下也可以测得。
平均压不能清楚地在压力波形上反映出来(图15)。
它通常由连续间隔很短时间测知的一系列压力所得,即将这些间隔测得的压力的总和,除以相应的数量。
P MEAN=(P1+P2+P3+…+P N)/N图15 平均压根据呼吸机设计不同,平均压的计算方法也不尽相同,有些呼吸机在连续测定一段压力数值之后,求其积分。
(即N为无穷大)是否是自主触发的辅助通气,可以从压力波形中看出。
非自主触发的机控呼吸的吸气开始是由时间循环触发的,压力从基线开始上升。
而自主触发的辅助通气,先有压力的下降,到达了预设的触发灵敏度随之呼吸机送气,压力升高。
图16是一次由病人触发的辅助通气。
注意压力持续下降至预设的触发灵敏度以下一段时间后,辅助通气才开始,压力上升,这一段时间即为响应时间。
图16 自主触发的辅助通气若触发灵敏度设置过大或病人呼吸极浅,只能看到压力下降而不能触发辅助通气,如图17。
相反的,灵敏度设置过小则易受外界因素影响。
(如环路内积水)图17 机控呼吸中——病人努力不够图17中,①和②都是病人的一次浅呼吸,但未达到预设的触发灵敏度,所以没有进行辅助通气,这种情况下,病人的吸气努力会a)从储气罐或持续气流中供气;b)按一定流速供给,以保持基线压平稳(漏气补偿);c)不供气③达到了一个机控呼吸的时间循环,呼吸机不管病人动作,予以一次强制通气,此时易出现对抗动作。
当呼吸过程中出现上述未能触发辅助通气的呼吸时,时间的测算也会受到影响。
此时测得的只有吸气时间和正压持续时间是准确的,而呼气时间、I:E等都会出现不符的情况。
图18 时间测算①机控呼吸的吸气时间②正压持续时间③机器测得的总呼吸循环的时间(TCT)④机器测得的呼气时间⑤病人实际的呼气时间①:④机器测得的I:E①:⑤病人实际的I:E在PCV和PSV模式中,压力是预设的,是一个独立可变量,而流速和潮气量是根据压力的预设值和病人状况而变化的非独立可变量。
相对的,在容控呼吸中,流速和潮气量是独立可变量,可以预设,而压力是非独立可变量。
图19压力测定——PCV、PSV图19中,PCV和PSV的压力波形相似,PSV吸气由病人触发,PCV 既可以有病人触发也可以由时间循环触发。