第7章--非线性系统分析--练习与解答
- 格式:doc
- 大小:4.17 MB
- 文档页数:20

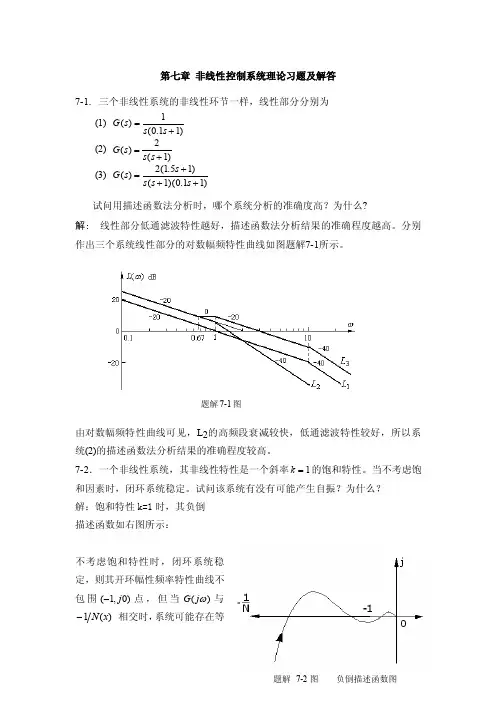
题解 7-2图 负倒描述函数图第七章 非线性控制系统理论习题及解答7-1. 三个非线性系统的非线性环节一样,线性部分分别为(1) G s s s ()(.)=+1011(2) G s s s ()()=+21(3) G s s s s s ()(.)()(.)=+++21511011试问用描述函数法分析时,哪个系统分析的准确度高?为什么?解: 线性部分低通滤波特性越好,描述函数法分析结果的准确程度越高。
分别作出三个系统线性部分的对数幅频特性曲线如图题解7-1所示。
由对数幅频特性曲线可见,L 2的高频段衰减较快,低通滤波特性较好,所以系统(2)的描述函数法分析结果的准确程度较高。
7-2.一个非线性系统,其非线性特性是一个斜率1=k 的饱和特性。
当不考虑饱和因素时,闭环系统稳定。
试问该系统有没有可能产生自振?为什么? 解:饱和特性k=1时,其负倒 描述函数如右图所示:不考虑饱和特性时,闭环系统稳定,则其开环幅性频率特性曲线不包围(1,0)j -点,但当)(ωj G 与)(1x N - 相交时,系统可能存在等题解7-1图幅振荡,如图所示,因此,该系统有可能产生自振。
7-3.将下列图7-50 所示非线性系统简化成非线性部分)(X N 和等效的线性部分)(s G 相串联的单位反馈系统,并写出线性部分的传递函数)(s G 。
解:(1)系统结构图可等效变换为题解7-3(1)的形式:其中)()(1)()(211s G s G s G s G +=(2)将系统结构图等效变换为题解7-2(2)的形式:G s G s H s ()()[()]=+111(3)将系统结构图等效变换为题解7-3(3)的形式:G s H s G s G s ()()()()=+1111题解7-3(1)图题解 7-3(2)图 题解 7-3(3)图7-4.判别图7-51所示各系统是否存在自振点。
解: (a)不是(b)是(c)是(d)ca、点是,b点不是(e)是(f)a点不是,b点是(g)a点不是,b点是(h)系统不稳定(i)系统不稳定(j)系统稳定(k)7-5.非线性系统如图7-52所示。

非线性系统理论1.1.非线性系统特点非线性系统与线性控制系统相比,具有一系列新的特点],线性系统满足叠加原理,而非线性控制系统不满足叠加原理。
图8-1带滤波器的非线性系统2•非线性系统的稳定性不仅取决于控制系统的固有结构和参数, 而且与系统的初始条件以及外加输入有关系。
例:对于一由非线性微分方程 X=-x(1 ―) 描述的非线性系统,显然有两个平衡点,即x 1=0和x 2=1。
将上式改写为=—dt x(l - x)设20吋,系统的初态为咛积分上式可得dx3•非线性系统可能存在自激振荡现象 的情况: (1) 如图跳跃谐振和多值响应8 — 3 所砂)其输出存在极其复杂图8—3跳跃谐振与多值响应(2)分频振荡和倍频振荡非线性系统在正弦信号作用下, 其稳态分量除产生同频率振荡外,和分频振荡。
如图 8—4所示波形。
还可能产生倍频振荡4•非线性系统在正弦信号作用下, 的输入信号倍频信号分频信图8—4倍频撮荡与分频振荡8.1.2 研究非线性系统的意义与方法1•研究非线性系统的意义1)实际的控制系统,存在着大量的非线性因素。
这些非线性因素的存在,使得我们用线性系统理论进行分析时所得出的结论,与实际系统的控制效果不一致。
线性系统理论无法解释非线性因素所产生的影响。
2)非线性特性的存在,并不总是对系统产生不良影响。
2•研究非线性系统的方法1)相平面法是用图解的方法分析一阶,二阶非线性系统的方法。
通过绘制控制系统相轨迹,达到分析非线性系统特性的方法。
2)描述函数法是受线性系统频率法启发,而发展出的一种分析非线性系统的方法。
它是一种谐波线性化的分析方法,是频率法在非线性系统分析中的推广。
3)计算机求解法是利用计算机运算能力和高速度对非线性微分方程的一种数值解法。
8.2典型非线性特性的数学描述及其对系统性能的影响8.2.1饱和特性在电子放大器中常见的一种非线性,如图8-5所示,饱和装置的输入特性的数学描述如下:[辰。
sig 滋(f)8.2.2死区特性死区特性也称为不灵敏区,如图8-6所示。
非线性系统的一般分析方法【课后自测】7-1 判断题7-31图中各系统是否稳定,)(1A N -与)(ωj G 两曲线交点是否为自振点。
图7-1 题7-1图解:(a )系统不稳定 曲线G(jw)与曲线()1N A -有交点a 、b 。
对于a 点,当A 增大时,()1N A -由G(jw)左侧稳定区进入右侧不稳定区,所以交点a 不是自振点。
对于b 点,当A 点增大时时,由G(jw)右侧不稳定区进入左侧稳定区,所以交点b 是稳定工作点,是自振点。
(b)系统不稳定 G(jw)曲线与()1N A -曲线有交点a 、b ,对于a 点,当A 增大时,()1N A -由G(jw)左侧稳定区进入右侧不稳定区,所以交点a 不是自振点。
对于b 点,当A 点增大时时,()1N A -由G(jw) 右侧不稳定区进入左侧稳定区,所以交点b 是自振点。
(c )()1N A -曲线被G(jw)曲线所包围,系统不稳定。
(d )系统不稳定 曲线G(jw)与曲线()1N A -曲线有一个交点,在交点处,当A 增大时,()1N A -由G(jw)右侧不稳定区进入左侧稳定区,所以交点是自振点。
(e )系统稳定(f )系统不稳定 G(jw)曲线与()-1N A 曲线有交点a 、b ,对于a 点,当A 增大时,()1N A -由G(jw)右不侧稳定区进入左侧稳定区,所以交点a 是自振点。
对于b 点,当A 点增大时时,()1N A -由G(jw) 右侧稳定区进入左侧不稳定区,所以交点b 不是自振点。
7-2 试求图7-32所示非线性特性的描述函数,画出-1/N 曲线,并指出X=0,X=1和X=∞时的-1/N 值。
图7-2 题7-2图解:由图可得非线性元件特性为1221()k xx a y k x k k ax a⎧≤⎪=⎨-->⎪⎩令sin x X t ω=,当x a ≥时,arcsin aa t Xω==1221sin 0()sin ()k X t t ay t k X t k k at aωωωω<<⎧=⎨-->⎩因()y t 是t 的奇函数,故10A =1212214()sin ()sin 2002()(arcsin )B y t td t y t td ta k X k k Xππωωωωπππ===+-⎰⎰ 所以11212()(arctan )2(arcsin )()AN X B ak k k XX a π==+-≥当X a <时,1sin y k X t ω=,02t πω<≤此时10A = 210221021011()sin 1sin 11cos 22B y t td t k X td t tk Xd t k xπππωωπωωπωωπ==-==⎰⎰⎰则1()N X k = ()X a <7-3 某单位反馈系统,其前向通道有一描述函数A eA N j/)(4π-=的非线性元件,线性部分的传递函数为)15.0(/15)(+=s s s G ,试用描述函数法确定系统是否存在自振?若有,参数是多少?解:非线性部分负倒数描述函数为:π-=-41()j Ae N A作()-1N A 和()G j ω曲线如图1所示。
第七章 非线性控制系统分析习题与解答7-1 设一阶非线性系统的微分方程为3x x x+-= 试确定系统有几个平衡状态,分析平衡状态的稳定性,并画出系统的相轨迹。
解 令 x=0 得 -+=-=-+=x x x x x x x 321110()()()系统平衡状态x e =-+011,,其中:0=e x :稳定的平衡状态;1,1+-=e x :不稳定平衡状态。
计算列表,画出相轨迹如图解7-1所示。
可见:当x ()01<时,系统最终收敛到稳定的平衡状态;当x ()01>时,系统发散;1)0(-<x 时,x t ()→-∞; 1)0(>x 时,x t ()→∞。
注:系统为一阶,故其相轨迹只有一条,不可能在整个 ~xx 平面上任意分布。
7-2 试确定下列方程的奇点及其类型,并用等倾斜线法绘制相平面图。
(1) x xx ++=0 (2) ⎩⎨⎧+=+=2122112x x xx x x解 (1) 系统方程为x -2 -1 -13 0 131 2x-6 0 0.385 0 -0.385 0 6 x 11 2 01 0211图解7-1 系统相轨迹⎩⎨⎧<=-+I I >=++I )0(0:)0(0:x x x x x x x x令0x x ==,得平衡点:0e x =。
系统特征方程及特征根:21,221,21:10,()2:10, 1.618,0.618()s s s s s s I II ⎧++==-±⎪⎨⎪+-==-+⎩稳定的焦点鞍点(, ) , , x f x x x x dxdxxx x dx dx x x x x x==--=--==--=-+=ααβ111⎪⎪⎩⎪⎪⎨⎧<-=>--=)0(11:II )0(11:I x x βαβα计算列表用等倾斜线法绘制系统相平面图如图解7-2(a )所示。
图解7-2(a )系统相平面图(2) xx x 112=+ ① 2122x x x+= ② 由式①: x xx 211=- ③ 式③代入②: ( )( )x xx x x 111112-=+- 即 x x x 11120--= ④ 令 x x110== 得平衡点: x e =0 由式④得特征方程及特征根为 ⎩⎨⎧-==--414.0414.20122,12λs s (鞍点) 画相轨迹,由④式x xdxdx x x x 1111112===+α xx 112=-α 计算列表用等倾斜线法绘制系统相平面图如图解7-2(b )所示。
7-3 已知系统运动方程为sin x x +=0,试确定奇点及其类型,并用等倾斜线法绘制相平面图。
解 求平衡点,令 x x==0 得 sin x =0平衡点 x k k e ==±±π(,,,012 )。
将原方程在平衡点附近展开为台劳级数,取线性项。
设 F x x x () sin =+=0∂∂∂∂F x x Fx x xx ee∆∆+=0∆∆ cos x x x e +⋅=0⎩⎨⎧±±±===∆-∆±±===∆+∆),5,3,1(0),4,2,0(0k k x x x k k x x x e e ππ特征方程及特征根: k 为偶数时 s j 21210+==±λ, (中心点) k 为奇数时 s 212101-==±λ, (鞍点)用等倾斜线法作相平面sin sin sin xdxdx x xx xx +=⋅+==α01作出系统相平面图如图解7-3所示。
7-4 若非线性系统的微分方程为(1) ( .) x x x x x +-++=30502 (2) x xxx ++=0 试求系统的奇点,并概略绘制奇点附近的相轨迹图。
解(1) 由原方程得(, )( .) . x f x xx x x x x x x x ==----=-+--305305222 令 x x110== 得 x x x x +=+=210() 解出奇点 x e =-01,在奇点处线性化处理。
在x e =0处:(, )(, ) ()( .) . x f x x xx f x xxxx x xx x x x xx xx x x x =⋅+⋅=--⋅+-+⋅=-+========∂∂∂∂0000001260505即. x x x -+=050 特征方程及特征根s j 1220505420250984,....=±-=± (不稳定的焦点) 在x e =-1处x x xxx x xxx xx 5.0)5.06()21(0101+=⋅+-+⋅--==-==-= 即. x x x --=050 特征根 ⎩⎨⎧-=+±=718.0218.1245.05.022,1s (鞍点) 概略画出奇点附近的相轨迹如图解7-4(1)所示:(2) 由原方程(, ) x f x xxx x ==-- 令x x ==0 得奇点 x e =0,在奇点处线性化( ) xfxx fxxx x x x x xx xx x x x =⋅+⋅=--⋅-⋅========∂∂∂∂00001得 x x =- 即x x +=0 特征根 s j 12,=±。
奇点x e =0(中心点)处的相轨迹如图解7-4(2)所示。
7-5 非线性系统的结构图如图7-36所示。
系统开始是静止的,输入信号)(14)(t t r ⨯=,试写出开关线方程,确定奇点的位置和类型,画出该系统的相平面图,并分析系统的运动特点。
解 由结构图,线性部分传递函数为C s M s s()()=12 得 ()()c t m t = ①由非线性环节有⎪⎩⎪⎨⎧III -<+II>-I ≤=22)(22)(20)(e t e e t e e t m ②由综合点得c t r t e t e t ()()()()=-=-4 ③ 将③、②代入①得⎪⎩⎪⎨⎧-<-->-≤=III2)(2II 2)(2I 20)(e t e e t e e t e开关线方程为 e t ()=±202:)(0)(:=-+I I ==I e ec e t e常数令 e e ==0 得奇点 e 02II =特征方程及特征根 s s j 21210+==±,, (中心点)III :e e ++=20 令 e e ==0 得奇点 e 02III=-特征方程及特征根 s s j 21210+==±,, (中心点)绘出系统相轨迹如图解7-5所示,可看出系统运动呈现周期振荡状态。
7-6 图7-37所示为一带有库仑摩擦的二阶系统,试用相平面法讨论库仑摩擦对系统单位阶跃响应的影响。
解 由系统结构图有⎩⎨⎧<->+±+⋅=0:0:215.015)()(ccs s s E s C s s C s E s (.)()()05125+±=⎩⎨⎧<=->=+II055.0I 0535.0ce c cc e c c ①因为 c r e e =-=-1 ②②代入①式有 ⎩⎨⎧>=+-<=++II00102I 00106ee e eee e e特征方程与特征根⎪⎩⎪⎨⎧±==+-±-==++)(310102:II )(30106:I 2,122,12不稳定的焦点稳定的焦点j s s s j s s s依题意 0)0(,0)0(==c c 可得0)0()0(1)0(1)0(===-=c ec e以)0,1(为起点概略作出系统相轨迹。
可见系统阶跃响应过程是振荡收敛的。
7-7 已知具有理想继电器的非线性系统如图7-38所示。
图7-38 具有理想继电器的非线性系统试用相平面法分析:(1)T d =0时系统的运动;(2)T d =05.时系统的运动,并说明比例微分控制对改善系统性能的作用; (3)T d =2时系统的运动特点。
解 依结构图,线性部分微分方程为c u = ① 非线性部分方程为 ⎩⎨⎧II <+-I >+=0101eT e eT e u d d ②开关线方程: eT e d=-1 由综合口: c r e e =-=-1 ③ ③、②代入①并整理得⎩⎨⎧II<++I>+-=0101d d eT e eT e e在 I 区: e edede ==-1 解出: ()e e e 220=-> (抛物线) 同理在 II 区可得:()ee e 220=< (抛物线)开关线方程分别为T d =0时, e =0;T d =05.时, ee =-2; T d =2 时, .ee =-05. 概略作出相平面图如图解7-7所示。
图习题集P178 T8-10由相平面图可见:加入比例微分控制可以改善系统的稳定性;当微分作用增强时,系统振荡性减小,响应加快。
7-8 具有饱和非线性特性的控制系统如图7-39所示,试用相平面法分析系统的阶跃响应。
解 非线性特性的数学表达式为III-<II >I <⎪⎩⎪⎨⎧-=ae a e a e M Me y || 线性部分的微分方程式为Ky c cT =+ 考虑到e c r =-,上式又可以写成rr T Ky e e T +=++ 输入信号为阶跃函数,在0>t 时有,0==rr ,因此有 0=++Ky e eT 根据已知的非线性特性,系统可分为三个线性区域。
Ⅰ区:系统的微分方程为)(0a e Ke e e T <=++按前面确定奇点的方法,可知系统在该区有一个奇点(0,0),奇点的类型为稳定焦点。
图解7-8(a )为Ⅰ区的相轨迹,它们是一簇趋向于原点的螺旋线。
Ⅱ区:系统的微分方程为)(0a e KM e eT >=++设一般情况下,初始条件为00)0(,)0(e ee e ==。
则上式的解为 KMt Te KM e T KM ee t e T t -+-++=-)()()(000 对上式求一次导数,得KM e KM e t eT t -+=-)()(0 故当初始条件KM e -=0'时,相轨迹方程为KM e -='。
当KM e -≠0'时,相轨迹方程为KM eKM eKMT T e ee e +++-+=000ln )(图7-39 非线性系统结构图由此可作出该区的相轨迹,如图解7-8(b )所示,相轨迹渐进于直线KM e-= 。
Ⅲ区:此时系统的微分方程为)(0a e KM e eT -<=-+将Ⅱ区相轨迹方程中的KM 改变符号,即得Ⅲ区的相轨迹方程⎪⎩⎪⎨⎧≠++--+===)(ln )()(00000KM eKM e KM e KMT T e e e e KM e KM e该区的相轨迹如图解7-8(b )所示。