设系统的状态空间描述为 x f (x, u, t) y g(x, u, t)
向量函数
f1(x,u,t)
g1(x,u,t)
f
(
x,
u,
t
)
f
2
(
x,
u,
t
),g
(
x,
u,
t)
g
2
(
x,
u,
t
)
f
n
(
x,
u,
t
)
gq
(
x,
u,
t
)
若f(x,u,t),g(x,u,t)的全部或至少一个组 成元素为x、u的非线性函数,该系统 称为非线性系统 。
J,F
La
2/7,6/50
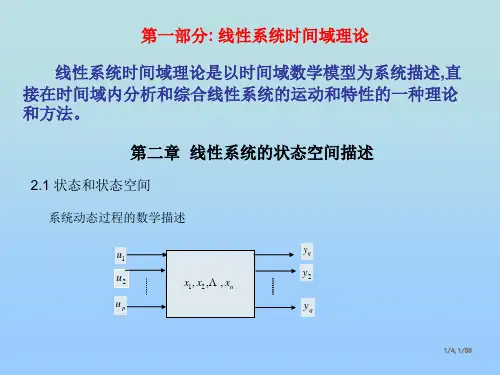
连续时间线性系统的状态空间描述 动态系统的结构
u1 u2
up
x1 x2
动力学部件
xn
输出部件
y1 y2
yq
连续时间线性系统的状态空间描述
线性时不变系统
X Y
AX Bu CX Du
线性时变系统
X A(t)X B(t)u Y C(t)X D(t)u
3/7,7/50
y2
up
yq
1/4,1/50
(1).系统的外部描述
u1
yq
外部描述常被称作为输出—输入描述
u2
x1, x2 ,, xn
y2
up
yq
例如.对SISO线性定常系统:时间域的外部描述:
y(n) an1 y(n1) a1 y(1) a0 y bn1u(n1) b1u (1) b0u
复频率域描述即传递函数描述
线性系统理论研究对象是 (线性的)模型系统,不 是物理系统。