第十二章简单机械第一节杠杆
- 格式:pdf
- 大小:2.25 MB
- 文档页数:18




第十二章《简单机械》第一节、杠杆1、在力的作用下,能绕固定点转动的硬棒,叫做杠杆。
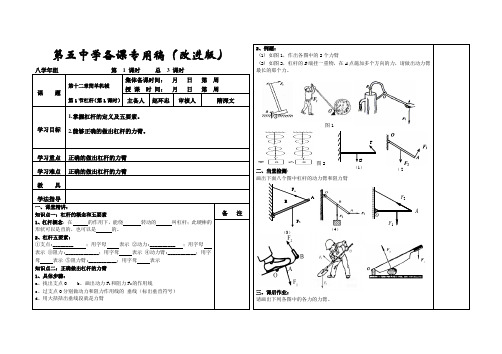
2、五要素——组成杠杆示意图 支点:杠杆可以绕其转动的点O 动力:使杠杆转动的力F 1 阻力:阻碍杠杆转动的力F 2动力臂:从支点O 到动力F 1作用线的距离l 1 阻力臂:从支点O 到阻力F 2作用线的距离l 2注:力臂即点到线的距离。
找到支点、力的作用线,再作支点到力的作用线的垂线。
34、研究杠杆的平衡条件:实验前:应调节杠杆两端的螺母,使杠杆在水平位置平衡。
这样做的目的是:可以方便的从杠杆上量出力臂。
结论:杠杆的平衡条件(或杠杆原理)是:动力×动力臂=阻力×阻力臂。
写成公式F 1l 1=F 2l 2 也可写成:F 1 / F 2=l 2 / l 15臂为一定值,要使动力最小,必须使动力臂最大,要使动力臂最大需要做到在杠杆上找一点,使这点到支点的距离最远。
说明:应根据实际来选择杠杆,当需要较大的力才能解决问题时,应选择省力杠杆,当为了使用方便,省距离时,应选费力杠杆。
第二节、滑轮1、定滑轮:中间的轴固定不动的滑轮,实质是一个等臂杠杆。
使用定滑轮不能省力但是能改变力的方向。
动滑轮:和重物一起移动的滑轮,可上下移动也可左右移动,动滑轮的实质是动力臂为阻力臂2倍的省力杠杆。
使用动滑轮能省一半的力费2倍的距离,不能改变力的方向。
2、滑轮组:定滑轮、动滑轮组合成滑轮组,使用滑轮组既能省力又能改变动力的方向。
3、滑轮组的两种绕线方法:根据“偶定奇动”的原则,结合题目的具体要求组装滑轮。
4、使用滑轮组时,滑轮组用几段绳子吊着动滑轮,拉力就是总重(物重+动滑轮重)的几分之一。
G 物:物重 G 动:动滑轮重 S :绳子自由端移动的距离 n :吊着动滑轮的绳子段数 h :物理上升的高度 理想滑轮(动滑轮重为零):F=G 物/ n S=nh 实际滑轮:F=(G 物+G 动)/ n S=nh 5、理想滑轮练习:6、实际滑轮练习:7、斜面理想斜面:斜面光滑理想斜面公式:FL=Gh 其中:F :沿斜面方向的推力;L :斜面长;G :物重;h :斜面高度 如果斜面与物体间的摩擦为f ,则:FL=fL+Gh ;这样F 做功就大于直接对物体做功Gh 。
第十二章简单机械第一节杠杆知识点一:杠杆1、定义:一根硬棒,在力的作用下绕着固定点转动。
注:杠杆可以是直的/弯的,但要一定是硬棒(不能变形)。
2、杠杆的五要素:(1)支点:绕其转动的点;(2)动力:使杠杆转动的力(一般为人施加的力);(3)动力臂:支点到动力作用线的距离;(4)阻力:阻碍杠杆转动的力;(5)阻力臂:支点到阻力作用线的距离。
注:a、支点一定在杠杆上,而力臂不一定在杠杆上。
b、动力和阻力的作用点都在杠杆上。
※寻找最大动力臂的方法:(1)当动力作用点确定时,该作用点到支点的距离即为最大动力臂;(2)当动力作用点未确定时,先在杆上找出距离支点最远的点作为动力作用点,该作用点到支点的距离即为最大动力臂。
3、力臂的画法:a、一定点(支点);b、二画线(力的作用线)c、三从点向线引垂线;支点到垂足的距离即为力臂。
知识点二:杠杆的平衡条件1、含义:在力的作用下,杠杆处于平衡状态:a、静止;b、绕支点匀速转动。
2、条件:动力×动力臂=阻力×阻力臂公式:(阿基米德杠杆原理)注:多力下杠杆的平衡情况:3、探究杠杆平衡条件实验(1)实验操作:调节杠杆两端螺母,使不挂钩码时保持水平并静止,目的:①使重心落在支点上,消除重力对平衡的影响;②方便读取力臂。
在实验过程中,不可以再调节螺母,但是杠杆倾斜不影响实验结果,只是不方便读取力臂。
(2)结论:当杠杆平衡时,动力×动力臂=阻力×阻力臂。
知识点三:杠杆的分类类型力臂关系力的关系优点缺点实例省力杠杆省力费距离开瓶器、钳子、羊角锤费力杠杆费力省距离筷子、镊子、钓鱼竿等臂杠杆既不省力也不费力,但可以改变力的方向。
天平定滑轮第二节滑轮知识点一:定滑轮1、本质:等臂杠杆2、特点:a、工作时轴不随物体移动;b、可以改变力的方向,但不省力;拉力(不计绳重和摩擦);c、不省距离;物体移动距离h绳自由端移动距离S=h。
注:使用定滑轮提升同一重物,沿不同方向的拉力都相等。