GPS数据内业处理
- 格式:ppt
- 大小:1.03 MB
- 文档页数:31

14 全球定位系统(GPS)定位原理简介一、填空题:1、GPS接收机基本观测值有伪距观测值、载波相位观测值。
2、GPS接收机按用途分,可分为导航型接收机、测地型接收机、授时型接收机和姿态测量型接收机。
其中测地型接收机,按载波频率又可分为单频接收机、双频接收机。
3、GPS接收机主要由GPS接收机天线、GPS接收机主机和电源三部分组成。
4、GPS定位是利用空间测距交会定点原理。
5、全球定位系统(GPS)主要由空间卫星部分、地面监控部分和用户设备三部分组成。
6、GPS卫星星座由 24颗卫星组成。
其中21颗工作卫星, 3 颗备用卫星。
工作卫星分布在 6 个近圆形的轨道面内,每个轨道上有 4 颗卫星。
GPS工作卫星距离地面的平均高度是20200km。
7、地面监控部分按功能可分为监测站、主控站和注入站三种。
8、GPS接收机接收的卫星信号有: 伪距观测值和载波相位观测值及卫星广播星历。
9、根据测距原理,GPS卫星定位方法有伪距定位法、载波相位测量定位和 G PS 差分定位。
对于待定点位,根据接收机运动状态可分为静态定位和动态定位。
根据获取定位结果的时间可分为实时定位和非实时定位。
10、在两个测站上分别安置接收机,同步观测相同的卫星,以确定两点间相对位置的定位方法称为相对定位。
11、载波相位相对定位普遍采用将相位观测值进行线性组合的方法。
具体方法有三种,即单差法、双差法和三差法。
12、GPS差分定位系统由基准站、流动站和无线电通信链三部分组成。
13、GPS测量实施过程与常规测量一样包括方案设计、外业测量和内业数据处理三部分。
二、名词解释:1、伪距单点定位----利用GPS接收机在某一时刻测定的四颗以上GPS卫星伪距及从卫星导航电文中获得的卫星位置,采用距离交会法求定天线所在的三维坐标.2、载波相位相对定位----用两台GPS接收机,分别安置在测线两端(该测线称为基线),固定不动,同步接收GPS卫星信号。
利用相同卫星的相位观测值进行解算,求定基线端点在WGS一84坐标系中的相对位置或基线向量。

《gps原理与应用》实习报告实习名称 gps测量实习地点平顶山市新城区日期 2010年6月7日—6月10日班级 0824082组别第三组姓名任路平指导教师王晓静潘传娇目录一、前言----------------------------------------------------------------3二、测区概况----------------------------------------------------------3三、实习内容----------------------------------------------------------51.实习项目--------------------------------------------------------------52. 仪器设备及人员---------------------------------------------------53.已有成果资料及分析-----------------------------------------------64.外业观测方法及步骤-----------------------------------------------65.精度要求及各种限差的规定-------------------------------------156.外业观测记录数据表(静态)----------------------------------167.内业计算成果及精度评定----------------------------------------188.存在问题及分析对比----------------------------------------------22四、心得体会---------------------------------------------------------23一、前言1、实习目的⑴落实gps测量;⑵完成一个控制网的外业观测及内业计算;⑶严格按照《全球定位系统(gps)测量规范》要求,精心设计、合理安排;⑷通过完成gps实际任务的锻炼,提高学生独立从事测绘工作的计划组织与管理能力,培养学生良好的专业品质和职业道德,达到综合素质培养的教学目的。
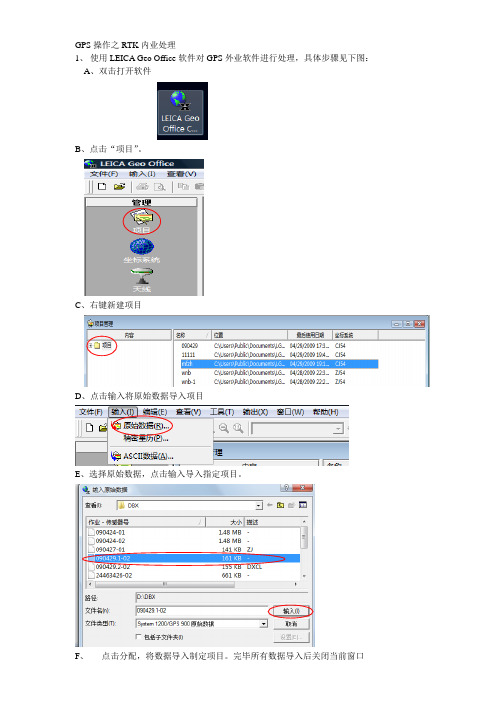
GPS操作之RTK内业处理1、使用LEICA Geo Office软件对GPS外业软件进行处理,具体步骤见下图:A、双击打开软件B、点击“项目”。
C、右键新建项目D、点击输入将原始数据导入项目E、选择原始数据,点击输入导入指定项目。
F、点击分配,将数据导入制定项目。
完毕所有数据导入后关闭当前窗口G、点击“local”和“格网坐标”将GPS数据转换为坐标。
H、在空白处点击右键将当前数据另存为“work”,点保存确认。
2、使用Excle软件对数据格式进行编辑,具体步骤见下图:A、打开刚才存储的“work.csv”文件并将数据转化为Cass格式的文件。
B、将上图E列的数据粘帖至work.TXT文件后保存,将文件名改为work .dat3、使用Cass软件进行绘图处理,具体步骤见下图:A、打开软件并点击绘图处理,将高程和点号展入cass(a) 为方便绘图可先展点号(b)选择绘图比例,Enter为确认(c)选择数据文件,重复完成直至数据全部导入(d)默认单位为米,Enter为确认(d)数据导入后的画面(e)用多段先将陡坎区连好(e)选择坡坎(f)选择未加固陡坎(g)绘制完成并拟合后出现上图B、生成等高线(a) 建立DTM (b) 方法两种均可以(c) 显示结果(a) 绘制等高线(b) 根据需要选择“等高距”(b) 等高线图C、工程量计算方法一:根据三角网(a)选择“根据图上三角网”进行土方计算(b) 输入标高(c)全选图面所有三角网(d)挖、填方量方法二:根据图面高程(a)选择“根据图上三角网”进行土方计算(b)边界线可用“多段线”绘制(c)输入相关管数据,确定(d)挖、填方量(e)指定表格左下角位置方法三:根据坐标文件。


2023年gps实习心得体会2023年gps实习心得体会1这次GPS实习包括两大部分--GPS静态测量和动态测量,测绘gps实习总结。
其中静态测量包括现有资料的收集(包括武大地图、已知点数据资料等)、实地勘踏选点并进行标记、调度方案的确定、正式外业数据采集、最后也就是最重要的内业处理。
动态测量包括利用GPS RTK技术进行RTK地形测量用于绘制等高线图以及利用RTK进行放样操作。
这次实习,实习成果如本报告第一到第三部分所展示,从整体来说,通过静态测量建立了武汉大学一校区到三校区的的国家C级GPS控制网,而通过动态RTK地形测量获得了武汉大学三校区友谊广场的等高线图。
其中在静态测量的内业处理中,通过基线解算、独立环闭合差检验、三维无约束平差、二维约束平差等过程可以很容易的得到重复基线长度较差、无约束和约束平差后各点的大地坐标和空间直角坐标。
实习体会与收获在这次实习中,我深刻体会了现代的测绘在空间卫星技术下的发展和GPS在各方面的领域的广泛运用。
也深刻的理解了现代社会对内业处理工作者的高知识水平的要求。
在内业处理过程中,经过自动化的基线解算和平差,通过删减卫星调整基线来提高精度让我懂得了如何去"精益求精"。
在现代社会科技发展过程中,空间卫星技术和其他的测绘技术将更加长远发展,那么就对我们现在还未走入社会的测绘人要求更多而且要求更高,数学计算和协调能力是测绘的显性要求,而编程能力和英语能力将是测绘的隐性要求而且将会越来越突出,值得一提的是,在静态测量实习过程中由于其中一台GPS接收机因为电源耗尽无法正常开机而使我们第二天的数据采集不能按照计划的调度方案执行。
因而需要临时调整调度方案,这对我们而言是个非常好的锻炼机会。
一开始各组长和队长都有点慌,因为这样会导致我们原先的计划全被打乱,而且要重新安排调度计划。
一方面我们需要按照国家C级网的要求进行观测(每个点得观测至少2个时段,每个时段至少观测60分钟),但另一方面由于接收机数量上会减少一台,加上电池的工作时间有限,以及老师要求我们每个时段得观测一个半小时左右。
论航测遥感内业数据处理技术航测遥感内业数据处理技术是指利用航空摄影、遥感器等技术获取地球表面信息后,通过对数据进行处理、分析和解译,得出用于地图制图、资源调查、环境监测等方面的信息产品和服务的技术。
随着航测遥感技术的不断发展和进步,内业数据处理技术也日新月异,为地理信息系统、地质勘探、农业建设等领域的应用提供了强大支持。
本文将从数据获取、数据处理、数据解译等方面详细介绍航测遥感内业数据处理技术的技术原理和应用实践。
一、数据获取航测遥感内业数据处理的第一步是数据获取,它主要包括航空摄影数据、遥感卫星数据、地面观测数据等。
数据获取的方式主要有以下几种:1. 航空摄影数据:航空摄影是一种通过航空器载荷的相机对地面进行摄影测量,获取地面情况的技术。
航空摄影数据是航测遥感内业数据处理的重要数据来源,其分辨率高、覆盖广,适用于地图制图、地形测量等领域。
2. 遥感卫星数据:遥感卫星是一种通过在轨卫星对地面进行观测,获取地表信息的技术。
遥感卫星数据具有覆盖范围大、周期短等优势,适用于全球范围内的资源调查、环境监测等领域。
3. 地面观测数据:地面观测是利用地面观测站、GPS等设备进行实地观测,获取地面信息的技术。
地面观测数据可以补充航空摄影、遥感卫星数据的不足,提高数据的准确性和可靠性。
二、数据处理数据处理是航测遥感内业数据处理的核心环节,它主要包括数据预处理、数据配准、数据配准、数据融合等步骤。
1. 数据预处理:数据预处理是指对获取的原始数据进行去噪、去除异常点、提取特征等操作,以提高数据的质量和准确性。
数据预处理可以采用数字信号处理、图像处理等技术,对数据进行滤波、增强、修复等操作,使数据更加符合后续处理的要求。
2. 数据配准:数据配准是指将不同时间、不同传感器获取的数据进行统一坐标系下的对齐,使不同数据间的空间位置一致。
数据配准可以通过地理定位系统、辅助信息匹配等方式进行,以保证后续数据处理的一致性和可比性。
GPS RTK数据处理与分析索佳武汉技术服务中心赵新维在GPS RTK作业过程中,经常会遇到各种各样的问题,其中最主要的还是求转换参数以及转换参数精度的问题。
有时也会遇到本文所描述的由于已知点采用的坐标系不一致,从而使RTK 作业不能达到预期的效果。
本文将根据在某地区进行RTK作业时的实测数据对这次的测量结果进行分析和处理。
一测试略图13流动点其中13号点为已知二等三角点,其余点都是已知导线点(城建坐标系)已知点坐标:表1 单位(米)点号X Y HA 90240.191 22101.055 34.023 87954.145 23568.368 20.9755 87724.435 23873.436 21.2387 87794.397 24209.068 20.9188 87769.055 24335.232 20.89510 87537.345 24475.347 20.90613 87715.226 24786.080 21.542RTK作业时,以A点作为基准站,3号点作为参考站求得转换参数后开始作业,测得各点坐标为:表2 单位(米) 点号X Y H 与已知坐标差值⊿X ⊿Y ⊿H5 87724.733 23871.988 ----- 0.298 -1.448 -----7 87793.105 24208.741 20.871 -1.292 -0.327 -0.0478 87767.451 24334.533 20.887 -1.604 -0.699 -0.00810 87535.477 24474.506 21.955 -1.868 -0.841 -1.04913 87721.716 24785.567 22.580 6.490 -0.513 1.038从上表的数据可以看到随着离开基准站的距离越远坐标差值逐渐增大,而最远的13号点的坐标与已知的坐标相差最大。
对测量结果受到的影响经过分析认为存在如下几种可能:1 是否采用的坐标不一致从而产生了这样的结果;2 利用A点和3号点所求的转换参数未考虑到整个测区的范围;3 是否由于在市区进行RTK作业数据链在传输过程中受到干扰等;为了查找是什么原因导致了这样的结果,首先对手簿中记录的数据进行了检查,并把3、5、7、8、10、13这些点的固定解结果下载到计算机。