《球坐标系与柱坐标系》教学案1
- 格式:doc
- 大小:68.50 KB
- 文档页数:3
三重积分中的柱坐标与球坐标在数学中,三重积分是一种用来计算三维空间内物体特定属性(例如体积、质量、质心等)的重要工具。
传统的笛卡尔坐标系在解决一些问题时并不总是方便,于是人们引入了柱坐标和球坐标系,这两种坐标系在三重积分中有着特殊的应用。
本文将介绍三重积分中的柱坐标与球坐标,以及它们的计算方法和在实际问题中的应用。
一、柱坐标中的三重积分柱坐标是一种常见的极坐标系,它由径向$r$、极角$\theta$和高度$z$三个变量构成。
在三重积分中,柱坐标系的转换公式为:$$x = r\cos\theta$$$$y = r\sin\theta$$$$z = z$$$$dV = r\,dr\,d\theta\,dz$$其中$dV$表示体积元素,$r$的范围为$r_1 \leq r \leq r_2$,$\theta$的范围为$\theta_1 \leq \theta \leq \theta_2$,$z$的范围为$z_1 \leq z \leq z_2$。
对于函数$f(x, y, z)$在柱坐标系下的三重积分,则有:$$\iiint\limits_{\Omega} f(x, y, z) dV = \int\limits_{z_1}^{z_2}\int\limits_{\theta_1}^{\theta_2} \int\limits_{r_1}^{r_2} f(r\cos\theta,r\sin\theta, z) r\,dr\,d\theta\,dz$$柱坐标系的三重积分常用于具有柱对称性的问题,例如计算柱体的体积、质心等属性。
它将空间问题简化为平面问题,使得计算更加便捷高效。
二、球坐标中的三重积分球坐标是另一种常见的极坐标系,它由径向$r$、极角$\theta$和方位角$\phi$三个变量构成。
在三重积分中,球坐标系的转换公式为:$$x = r\sin\phi\cos\theta$$$$y = r\sin\phi\sin\theta$$$$z = r\cos\phi$$$$dV = r^2\sin\phi\,dr\,d\theta\,d\phi$$其中$dV$表示体积元素,$r$的范围为$r_1 \leq r \leq r_2$,$\theta$的范围为$\theta_1 \leq \theta \leq \theta_2$,$\phi$的范围为$\phi_1 \leq \phi \leq \phi_2$。
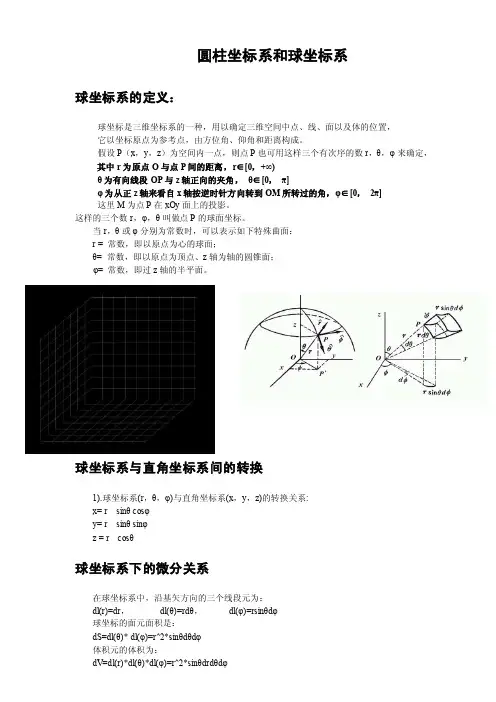
圆柱坐标系和球坐标系球坐标系的定义:球坐标是三维坐标系的一种,用以确定三维空间中点、线、面以及体的位置,它以坐标原点为参考点,由方位角、仰角和距离构成。
假设P(x,y,z)为空间内一点,则点P也可用这样三个有次序的数r,θ,φ来确定,其中r为原点O与点P间的距离,r∈[0,+∞)θ为有向线段OP与z轴正向的夹角,θ∈[0,π]φ为从正z轴来看自x轴按逆时针方向转到OM所转过的角,φ∈[0,2π]这里M为点P在xOy面上的投影。
这样的三个数r,φ,θ叫做点P的球面坐标。
当r,θ或φ分别为常数时,可以表示如下特殊曲面:r = 常数,即以原点为心的球面;θ= 常数,即以原点为顶点、z轴为轴的圆锥面;φ= 常数,即过z轴的半平面。
球坐标系与直角坐标系间的转换1).球坐标系(r,θ,φ)与直角坐标系(x,y,z)的转换关系:x= r sinθ cosφy= r sinθsinφz = r cosθ球坐标系下的微分关系在球坐标系中,沿基矢方向的三个线段元为:dl(r)=dr,dl(θ)=rdθ,dl(φ)=rsinθdφ球坐标的面元面积是:dS=dl(θ)* dl(φ)=r^2*sinθdθdφ体积元的体积为:dV=dl(r)*dl(θ)*dl(φ)=r^2*sinθdrdθdφ圆柱坐标系的定义:它是二维极坐标系往z-轴的延伸。
添加的第三个坐标专门用来表示P点离xy-平面的高低。
按照国际标准化组织建立的约定(ISO 31-11) ,径向距离、方位角、高度,分别标记为。
如图右,P 点的圆柱坐标是。
是P 点与z-轴的垂直距离。
是线OP 在xy-面的投影线与正x-轴之间的夹角。
与直角坐标的等值。
圆柱坐标系与直角坐标系间的转换1).圆柱坐标系(r,φ,z)与直角坐标系(x,y,z)的转换关系:x=r co sφy=r sinφz=z圆柱坐标系下的微分关系在球坐标系中,沿基矢方向的三个线段元为:dl(r)=dr,dl(φ)=rdφ,dl(z)= dz球坐标的面元面积是:dS=dl(θ)* dl(z)=r dφ dz体积元的体积为:dV=dl(r)*dl(φ)*dl(z)=r dr dφ dz。
1.5 柱坐标系和球坐标系1.5.1 柱坐标系 1.5.2 球坐标系1.了解柱坐标系、球坐标系的意义,能用柱坐标系、球坐标系刻画简单问题中的点的位置.(重点)2.知道柱坐标、球坐标与空间直角坐标的互化关系与公式.(难点)[基础·初探]1.柱坐标系 (1)柱坐标设空间中一点M 的直角坐标为(x ,y ,z ),M 点在xOy 坐标面上的投影点为M 0,M 0点在xOy 平面上的极坐标为(ρ,θ),如图1-5-1所示,则三个有序数ρ,θ,z 构成的数组(ρ,θ,z )称为空间中点M 的柱坐标.在柱坐标中,限定ρ≥0,0≤θ<2π,z 为任意实数.图1-5-1(2)空间直角坐标与柱坐标的变换公式空间点M (x ,y ,z )与柱坐标(ρ,θ,z )之间的变换公式为⎩⎨⎧x =ρcos θy =ρsin θz =z.2.球坐标系 (1)球坐标设空间中一点M 的直角坐标为(x ,y ,z ),点M 在xOy 坐标面上的投影点为M 0,连接OM 和OM 0.图1-5-2如图1-5-2所示,设z 轴的正向与向量OM →的夹角为φ,x 轴的正向与OM 0→的夹角为θ,M 点到原点O 的距离为r ,则由三个数r ,θ,φ构成的有序数组(r ,θ,φ)称为空间中点M 的球坐标.若设投影点M 0在xOy 平面上的极坐标为(ρ,θ),则极坐标θ就是上述的第二个球坐标θ.在球坐标中限定r ≥0,0≤θ<2π,0≤φ≤π.(2)空间直角坐标与球坐标的变换公式空间点M (x ,y ,z )与球坐标(r ,θ,φ)之间的变换公式为⎩⎨⎧x =r sin φcos θy =r sin φsin θz =r cos φ.[思考·探究]1.要刻画空间一点的位置,就距离和角的个数来说有什么限制? 【提示】 空间点的坐标都是三个数值,其中至少有一个是距离.2.在柱坐标系中,方程ρ=1表示空间中的什么曲面?在球坐标系中,方程r =1分别表示空间中的什么曲面?【提示】 柱坐标系中,ρ=1表示以z 轴为中心,以1为半径的圆柱面;球坐标系中,方程r =1表示球心在原点的单位球面.[自主·测评]1.在空间直角坐标系中,点P 的柱坐标为(2,π4,3),P 在xOy 平面上的射影为Q ,则Q 点的坐标为( )A.(2,0,3)B.(2,π4,0) C.(2,π4,3)D.(2,π4,0)【解析】 由点的空间柱坐标的意义可知,选B. 【答案】 B2.已知点A 的柱坐标为(1,0,1),则点A 的直角坐标为( ) A.(1,1,0) B.(1,0,1) C.(0,1,1)D.(1,1,1)【解析】 x =ρ·cos θ=1cos θ=1,y =ρsin θ=0,z =1. 【答案】 B3.设点M 的直角坐标为(-1,-3,3),则它的柱坐标是( ) A.(2,π3,3)B.(2,2π3,3)C.(2,4π3,3) D.(2,5π3,3)【解析】∵ρ=(-1)2+(-3)2=2,tan θ=-3-1=3,∴θ=π3或4 3π.又∵M的直角坐标中x=-1,y=-3,∴排除θ=π3,∴θ=4 3π.∴M的柱坐标为(2,4π3,3).【答案】 C4.设点M的直角坐标为(-1,-1,0),则它的球坐标为()【导学号:62790006】A.(2,π4,0) B.(2,5π4,π2)C.(2,5π4,0) D.(2,0,π4)【解析】由坐标变换公式,得r=x2+y2+z2=2,cos φ=zr=0,∴φ=π2.∵tan θ=yx=1,∴θ=5 4π.【答案】 B[质疑·手记]预习完成后,请将你的疑问记录,并与“小伙伴们”探讨交流:疑问1:解惑:疑问2:解惑: 疑问3: 解惑: 类型一 点的柱坐标与直角坐标互化设点M 的直角坐标为(1,1,1),求它的柱坐标系中的坐标.【精彩点拨】 已知直角坐标系中的直角坐标化为柱坐标,利用公式⎩⎪⎨⎪⎧x =ρcos θ,y =ρsin θ,z =z .求出ρ,θ即可.【尝试解答】 设M 的柱坐标为(ρ,θ,z ), 则有⎩⎪⎨⎪⎧1=ρcos θ,1=ρsin θ,z =1,解之得,ρ=2,θ=π4.因此,点M 的柱坐标为(2,π4,1).由直角坐标系中的直角坐标求柱坐标,可以先设出点M 的柱坐标为(ρ,θ,z )代入变换公式⎩⎨⎧x =ρcos θ,y =ρsin θ,z =z .求ρ;也可以利用ρ2=x 2+y 2,求ρ.利用tan θ=yx ,求θ,在求θ的时候特别注意角θ所在的象限,从而确定θ的取值.[再练一题]1.根据下列点的柱坐标,分别求直角坐标: (1)(2,5π6,3);(2)(2,π4,5). 【解】 设点的直角坐标为(x ,y ,z ). (1)∵(ρ,θ,z )=(2,5π6,3),∴⎩⎪⎨⎪⎧x =ρcos θ=2cos 5π6=-3,y =ρsin θ=2sin 5π6=1,z =3,因此所求点的直角坐标为(-3,1,3). (2)∵(ρ,θ,z )=(2,π4,5),∴⎩⎪⎨⎪⎧x =ρcos θ=2cos π4=1,y =ρsin θ=2sin π4=1,z =5.故所求点的直角坐标为(1,1,5). 类型二 将点的球坐标化为直角坐标已知点M 的球坐标为(2,34π,34π),求它的直角坐标. 【精彩点拨】球坐标――――――――――――――――→x =r sin φcos θ,y =r sin φsin θ,z =r cos φ直角坐标【尝试解答】 设点的直角坐标为(x ,y ,z ). ∵(r ,θ,φ)=(2,34π,34π),∴x =2sin 34πcos 34π=2×22×(-22)=-1,y =2sin 34πsin 34π=2×22×22=1, z =2cos 34π=2×(-22)=- 2. 因此点M 的直角坐标为(-1,1,-2).1.根据球坐标系的意义以及与空间直角坐标系的联系,首先要明确点的球坐标(r ,θ,φ)中角φ,θ的边与数轴Oz ,Ox 的关系,注意各自的限定范围,即0≤θ<2π,0≤φ≤π.2.化点的球坐标(r ,θ,φ)为直角坐标(x ,y ,z ),需要运用公式⎩⎨⎧x =r sin φcos θ,y =r sin φsin θ,z =r cos φ.转化为三角函数的求值与运算.[再练一题]2.若“例2”中点M 的球坐标改为M (3,5π3,5π6),试求点M 的直角坐标. 【解】 设M 的直角坐标为(x ,y ,z ). ∵(r ,θ,φ)=(3,5π3,5π6), x =r sin φcos θ=3sin 5π6cos 5π3=34, y =r sin φsin θ=3sin 5π6sin 5π3=-334, z =r cos φ=3cos5π6=-332. ∴点M 的直角坐标为(34,-334,-332). 类型三 空间点的直角坐标化为球坐标已知长方体ABCD -A 1B 1C 1D 1中,底面正方形ABCD 的边长为1,棱AA 1的长为2,如图1-5-3所示,建立空间直角坐标系Axyz ,Ax 为极轴,求点C 1的直角坐标和球坐标.图1-5-3【精彩点拨】 先确定C 1的直角坐标,再根据空间直角坐标系与球坐标系的联系,计算球坐标.【尝试解答】 点C 1的直角坐标为(1,1,2).设C 1的球坐标为(r ,θ,φ),其中r ≥0,0≤θ<2π,0≤φ≤π, 由x =r sin φcos θ,y =r sin φsin θ,z =r ·cos φ, ∴r =x 2+y 2+z 2=12+(2)2+12=2.由z =r cos φ,∴cos φ=22,φ=π4. 又tan θ=y x =1,∴θ=π4, 从而点C 1的球坐标为(2,π4,π4).1.由直角坐标化为球坐标时,我们可以选设点M 的球坐标为(r ,θ,φ),再利用变换公式⎩⎨⎧x =r sin φcos θ,y =r sin φsin θ,z =r cos φ.求出r ,θ,φ.2.利用r 2=x 2+y 2+z 2,tan θ=y x ,cos φ=zr .特别注意由直角坐标求球坐标时,应首先看明白点所在的象限,准确取值,才能无误.[再练一题]3.若本例中条件不变,求点C 的柱坐标和球坐标. 【解】 易知C 的直角坐标为(1,1,0).设点C 的柱坐标为(ρ,θ,0),球坐标为(r ,φ,θ),其中0≤φ≤π,0≤θ<2π. (1)由于ρ=x 2+y 2=12+12= 2.又tan θ=yx =1, ∴θ=π4.因此点C 的柱坐标为(2,π4,0). (2)由r =x 2+y 2+z 2=12+12+0= 2.∴cos φ=z r =0,∴φ=π2. 故点C 的球坐标为(2,π2,π4).[真题链接赏析](教材P21练习T2)设点M的柱坐标为(2,π6,7),求它的直角坐标.在柱坐标系中,点M的柱坐标为(2,23π,5),则|OM|=________.【命题意图】本题主要考查柱坐标系的意义,以及点的位置刻画.【解析】设点M的直角坐标为(x,y,z).由(ρ,θ,z)=(2,23π,5)知x=ρcos θ=2cos 23π=-1,y=2sin23π= 3.因此|OM|=x2+y2+z2=(-1)2+(3)2+(5)2=3.【答案】 3我还有这些不足:(1)(2)我的课下提升方案:(1)(2)。
第八课时 球坐标系与柱坐标系一、教学目的:知识目标:了解在柱坐标系、球坐标系中刻画空间中点的位置的方法 能力目标:了解柱坐标、球坐标与直角坐标之间的变换公式。
德育目标:通过观察、探索、发现的创造性过程,培养创新意识。
二、重难点:教学重点:体会与空间直角坐标系中刻画空间点的位置的方法的区别和联系。
教学难点:利用它们进行简单的数学应用。
三、教学方法:启发、诱导发现教学. 四、教学过程: (一)、复习引入:情境:我们用三个数据来确定卫星的位置,即卫星到地球中心的距离、经度、纬度。
问题:如何在空间里确定点的位置?有哪些方法? 学生回顾在空间直角坐标系中刻画点的位置的方法 极坐标的意义以及极坐标与直角坐标的互化原理 (二)、讲解新课: 1、球坐标系设P 是空间任意一点,在oxy 平面的射影为Q ,连接OP ,记| OP |=r ,OP 与OZ 轴正向所夹的角为θ,P 在oxy 平面的射影为Q ,Ox 轴按逆时针方向旋转到OQ 时所转过的最小正角为ϕ,点P 的位置可以用有序数组),,(ϕθr 表示,我们把建立上述对应关系的坐标系叫球坐标系(或空间极坐标系)有序数组),,(ϕθr 叫做点P 的球坐标,其中r ≥0,0≤θ≤π,0≤ϕ<2π。
空间点P 的直角坐标),,(z y x 与球坐标),,(ϕθr 之间的变换关系为:⎪⎪⎩⎪⎪⎨⎧====++θϕθϕθcos sin sin cos sin 2222r z r y r x r z y x2、柱坐标系设P 是空间任意一点,在oxy 平面的射影为Q ,用(ρ,θ)(ρ≥0,0≤θ<2π)表示点在平面oxy 上的极坐标,点P 的位置可用有序数组(ρ,θ,Z)表示把建立上述对应关系的坐标系叫做柱坐标系有序数组(ρ,θ,Z)叫点P 的柱坐标,其中ρ≥0, 0≤θ<2π, z ∈R 空间点P 的直角坐标(x, y, z)与柱坐标(ρ,θ,Z)之间的变换关系为:⎪⎩⎪⎨⎧===z z y x θρθρsin cos3、数学应用例1建立适当的球坐标系,表示棱长为1的正方体的顶点. 变式训练:建立适当的柱坐标系, 表示棱长为1的正方体的顶点. 例2.将点M 的球坐标)65,3,8(ππ化为直角坐标.变式训练1.将点M 的直角坐标)2,1,1(--化为球坐标.2.将点M 的柱坐标)8,3,4(π化为直角坐标.3.在直角坐标系中点),,(a a a a (>0)的球坐标是什么?例3.球坐标满足方程r=3的点所构成的图形是什么?并将此方程化为直角坐标方程. 变式训练极坐标满足方程ρ=2的点所构成的图形是什么? 例4.已知点M 的柱坐标为),3,4,2(π点N 的球坐标为),2,4,2(ππ求线段MN 的长度.思考:在球坐标系中,集合⎪⎩⎪⎨⎧⎭⎬⎫≤≤≤≤≤≤=πϕπθϕθ20,20,62),,(r r M 表示的图形的体积为多少?(三)、巩固练习:课本P22页练习3(四)、小结:本节课学习了以下内容:1.球坐标系的作用与规则; 2.柱坐标系的作用与规则。
四 柱坐标系与球坐标系简介1.柱坐标系在平面极坐标系的基础上,通过极点O ,再增加一条与极坐标系所在平面垂直的z 轴,这样就建立了柱坐标系(如图).设M (x ,y ,z )为空间一点,并设点M 在xOy 平面上的投影点P 的极坐标为(r ,θ),则这样的三个数r ,θ,z 构成的有序数组(r ,θ,z )就叫作点M 的______,这里规定r ,θ,z 的变化范围为0≤r <+∞,0≤θ<2π,-∞<z <+∞.特别地,r =常数,表示的是以z 轴为轴的______; θ=常数,表示的是过z 轴的______; z =常数,表示的是与xOy 平面平行的____.显然,点M 的直角坐标与柱坐标的关系为⎩⎪⎨⎪⎧x = ,y = ,z =z .【做一做1-1】点A 的柱坐标是⎝⎛⎭⎫2,π6,7,则它的直角坐标是__________. 【做一做1-2】点B 的直角坐标为(1,3,4),则它的柱坐标是__________. 2.球坐标系设M (x ,y ,z )为空间一点,点M 可用这样三个有次序的数r ,φ,θ来确定,其中r 为原点O 到点M 间的距离,φ为有向线段OM →与z 轴正方向所夹的角,θ为从z 轴正半轴看,x 轴正半轴按逆时针方向旋转到有向线段OP →的角,这里P 为点M 在xOy 平面上的投影(如图).这样的三个数r ,φ,θ构成的有序数组(r ,φ,θ)叫作点M 的______,这里r ,φ,θ的变化范围为0≤r <+∞,0≤φ≤π,0≤θ<2π,特别地,r =常数,表示的是____________;φ=常数,表示的是以原点为顶点,z 轴为轴的圆锥面;θ=常数,表示的是过z 轴的半平面.点M 的直角坐标与球坐标的关系为⎩⎪⎨⎪⎧x =|OP |cos θ= ,y =|OP |sin θ= ,z = .【做一做2-1】设点M 的球坐标为⎝⎛⎭⎫2,34π,34π,则它的直角坐标是__________. 【做一做2-2】将点M (1,-1,6)化成球坐标为__________.1.在研究空间图形的几何特征时,应该怎样建立坐标系?剖析:我们已经学习了数轴、平面直角坐标系、平面极坐标系、空间直角坐标系、柱坐标系、球坐标系等.坐标系是联系形与数的桥梁,利用坐标系可以实现几何问题与代数问题的相互转化.不同的坐标系有不同的特点,在实际应用时,我们就可以根据问题的特点选择适当的坐标系,借助坐标系方便、简捷地研究问题.当图形中有互相垂直且相交于一点的三条直线时,可以利用这三条直线直接建系. 有些图形虽然没有互相垂直且相交于一点的三条直线,但是图形中有一定的对称关系(如:正三棱锥、正四棱锥、正六棱锥等),我们可以利用图形的对称性建立空间坐标系来解题.有些图形没有互相垂直且相交于一点的三条直线,但是有两个互相垂直的平面,我们可以利用面面垂直的性质定理,作出互相垂直且相交于一点的三条直线,建立空间坐标系.2.空间直角坐标系、柱坐标系都是刻画点的位置的方法,它们有什么联系和区别? 剖析:在直角坐标系中,我们需要三个长度x ,y ,z ;而在柱坐标系中,我们需要长度,还需要角度,它是从长度、方向来描述一个点的位置,需要r ,θ,z .空间直角坐标:设点M 为空间一已知点.我们过点M 作三个平面分别垂直于x 轴、y 轴、z 轴,它们与x 轴、y 轴、z 轴的交点依次为P ,Q ,R ,这三点在x 轴、y 轴、z 轴的坐标依次为x ,y ,z .于是空间的一点M 就唯一地确定了一个有序数组(x ,y ,z ).这个组数(x ,y ,z )就叫做点M 的坐标,并依次称x 、y 和z 为点M 的横坐标、纵坐标和竖坐标.(如图所示)坐标为(x ,y ,z )的点M 通常记为M (x ,y ,z ).这样,通过空间直角坐标系,我们就建立了空间的点M 和有序数组(x ,y ,z )之间的一一对应关系.如果点M 在yOz 平面上,则x =0;同样,zOx 平面上的点,y =0;xOy 平面上的点,z =0.如果点M 在x 轴上,则y =z =0;如果点M 在y 轴上,则x =z =0;如果点M 在z 轴上,则x =y =0.如果M 是原点,则x =y =z =0等.这两种三维坐标互相不同,互相有联系,互相能够转化,都是刻画空间一点的位置,只是描述的角度不同.题型一 柱坐标与直角坐标的互化【例1】将点M 的直角坐标化为柱坐标,将点P 的柱坐标化为直角坐标.(1)M (-1,3,2);(2)P ⎝⎛⎭⎫2,π4,1. 题型二 球坐标与直角坐标的互化【例2】将点M 的直角坐标化为球坐标,点P 的球坐标化为直角坐标.(1)M (1,3,2);(2)P ⎝⎛⎭⎫2,π6,π3.题型三 柱坐标、球坐标的实际应用【例3】一个圆形体育馆,自正东方向起,按逆时针方向等分为十六个扇形区域,顺次记为一区,二区,…,十六区,我们设圆形体育场第一排与体育馆中心的距离为200 m ,每相邻两排的间距为1 m ,每层看台的高度为0.7 m ,现在需要确定第九区第四排正中的位置A ,请建立适当的坐标系,把点A 的坐标求出来.题型四 易错题型【例4】将直角坐标系中的点M (-3,3,3)转化成柱坐标.随堂练习1设点M 的直角坐标为(1,9),则它的柱坐标是( ). A.π2,,93⎛⎫ ⎪⎝⎭ B.2π2,,93⎛⎫ ⎪⎝⎭ C.4π2,,93⎛⎫ ⎪⎝⎭D.5π2,,93⎛⎫ ⎪⎝⎭ 2在球坐标系中,M ππ4,,46⎛⎫ ⎪⎝⎭与N π24,,π43⎛⎫⎪⎝⎭两点间的距离是__________.3设点A 的柱坐标为π4,则它的球坐标为__________. 4用两个平行平面去截球,在两个截面圆上有两个点,它们分别为A π8,,4A θ⎛⎫ ⎪⎝⎭、B 3π8,,4B θ⎛⎫ ⎪⎝⎭,求出这两个截面间的距离.参考答案1.柱坐标 圆柱面 半平面 平面 r cos θ r sin θ【做一做1-1】(3,1,7) x =r cos θ=2·cos π6=3,y =r sin θ=2sin π6=1,z =7,∴点A 的直角坐标为(3,1,7).【做一做1-2】⎝⎛⎭⎫2,π3,4 x =1=r cos θ,y =3=r sin θ, ∴tan θ= 3.∵0≤θ<2π,x >0,∴θ=π3,r =2,z =4,∴点B 的柱坐标为⎝⎛⎭⎫2,π3,4. 2.球坐标 以原点为球心的球面 r sin φcos θ r sin φsin θ r cos φ【做一做2-1】(-1,1,-2) 由公式得⎩⎪⎨⎪⎧x =2sin 34πcos 34π=-1,y =2sin 34πsin 34π=1,z =2cos 34π=-2,∴点M 的直角坐标为(-1,1,-2).【做一做2-2】⎝⎛⎭⎫22,π6,3π4 设点M 的球坐标为(γ,φ,θ), 则r =12+-12+62=22,tan φ=x 2+y 2z =12+126=33,由0≤φ≤π,知φ=π6,又tan θ=y x =-11=-1,0≤θ<2π,x >0,∴θ=3π4.∴M (1,-1,6)的球坐标为⎝⎛⎭⎫22,π6,3π4. 【例1】解:(1)设M 点的柱坐标为(r ,θ,z ), 则有⎩⎪⎨⎪⎧x =r cos θ,y =r sin θ,z =z⇒⎩⎪⎨⎪⎧-1=r cos θ,3=r sin θ,z =2,⇒tan θ=- 3.又∵0≤θ<2π,x <0,∴θ=2π3,r =2.∴M 点的柱坐标为⎝⎛⎭⎫2,2π3,2. (2)设P 点的直角坐标为(x ,y ,z ),则有⎩⎪⎨⎪⎧x =r cos θ=2cos π4=2,y =r sin θ=2sin π4=2,z =z =1,∴点P 的直角坐标为(2,2,1).【例2】解:(1)设M 点的球坐标为(r ,φ,θ),则有⎩⎪⎨⎪⎧x =r sin φcos θ,y =r sin φsin θ,z =r cos φ⇒⎩⎪⎨⎪⎧1=r sin φcos θ,3=r sin φsin θ,2=r cos φ,∴tan θ= 3.∵0≤θ<2π,x >0,∴θ=π3,r =x 2+y 2+z 2=12+32+22=2 2.∴2=22cos φ.∴cos φ=22. ∵0≤φ≤π,∴φ=π4.∴M 点的球坐标为⎝⎛⎭⎫22,π4,π3. (2)设P 点的直角坐标为(x ,y ,z ),则有⎩⎪⎨⎪⎧x =r sin φcos θ=2sin π6cos π3=12,y =r sin φsin θ=2sin π6sin π3=32,z =r cos φ=2cos π6= 3.∴P 点的直角坐标为⎝⎛⎭⎫12,32,3.【例3】解:以圆形体育馆中心O 为极点,选取以O 为端点且过正东入口的射线Ox 为极轴,在地面上建立极坐标系,则点A 与体育场中轴线Oz 的距离为203 m ,极轴Ox 按逆时针方向旋转2π16×172=17π16,就是OA 在地平面上的射影,A 距地面的高度为2.8 m ,因此点A 的柱坐标为⎝⎛⎭⎫203,17π16,2.8. 【例4】正解:设点M 的柱坐标为(r ,θ,z ),则由⎩⎪⎨⎪⎧x =r cos θ,y =r sin θ,z =z ,得⎩⎪⎨⎪⎧tan θ=y x =-33,z =3.∵0≤θ<2π且x <0,∴θ=56π,r =2 3.∴M 点的柱坐标为⎝⎛⎭⎫23,56π,3. 随堂练习1.D ∵r =12+-32=2,θ=5π3,z =9,∴点M 的柱坐标为⎝⎛⎭⎫2,5π3,9. 2.4 设点M ⎝⎛⎭⎫4,π4,π6的直角坐标为(x ,y ,z ),则⎩⎪⎨⎪⎧x =r sin φcos θ=4sin π4cos π6=4×22×32=6,y =r sin φsin θ=4sin π4sin π6=4×22×12=2,z =r cos φ=4cos π4=2 2.∴M 点的直角坐标为(6,2,22),同理,N 点的直角坐标为(-2,6,22). ∴|MN |=(6+2)2+(2-6)2+(22-22)2=4.3.⎝⎛⎭⎫22,π6,π4 设A 的直角坐标为(x ,y ,z ),则x =r cos θ=2cos π4=1, y =r sin θ=2cos π4=1,z =6,∴点A 的直角坐标为(1,1,6).设点A 的球坐标为(r ,φ,θ).则有⎩⎪⎨⎪⎧x =r sin φcos θ,y =r sin φsin θ,z =r cos φ⇒⎩⎪⎨⎪⎧1=r sin φcos θ,1=r sin φsin θ,6=r cos φ.∴tan θ=1.又∵0≤θ<2π,x >0,∴θ=π4,r =x 2+y 2+z 2=12+12+(6)2=2 2.∴cos φ=622=32.又∵0≤φ≤π,∴φ=π6.∴点A 的球坐标为⎝⎛⎭⎫22,π6,π4. 4.解:如图,由题意可知,O 1O 2即为两个截面间的距离.∵|OA |=|OB |=8,∠AOO 1=π4,∠BOO 1=3π4,∴在△AOO 1中,|OO 1|=|OA |cos π4=4 2.在△BOO 2中,|OO 2|=|OB |cos π4=4 2.则|O 1O 2|=|OO 1|+|OO 2|=42+42=82,即两个截面间的距离为8 2.。
4.1.3球坐标系与柱坐标系1.球坐标系、柱坐标系的理解.2.球坐标、柱坐标与直角坐标的互化.[基础·初探]1.球坐标系与球坐标(1)在空间任取一点O作为极点,从O点引两条互相垂直的射线Ox和Oz作为极轴,再规定一个长度单位和射线Ox绕Oz轴旋转所成的角的正方向,这样就建立了一个球坐标系.图4-1-5(2)设P是空间一点,用r表示OP的长度,θ表示以Oz为始边,OP为终边的角,φ表示半平面xOz到半平面POz的角,则有序数组(r,θ,φ)就叫做点P 的球坐标,其中r≥0,0≤θ≤π,0≤φ<2π.2.直角坐标与球坐标间的关系图4-1-6若空间直角坐标系的原点O,Ox轴及Oz轴,分别与球坐标系的极点、Ox 轴及Oz轴重合,就可以得到空间中同一点P的直角坐标(x,y,z)与球坐标(r,θ,φ)之间的关系,如图4-1-6所示.x 2+y 2+z 2=r 2, x =r sin_θcos_φ, y =r sin_θsin_φ, z =r cos_θ. 3.柱坐标系建立了空间直角坐标系O -xyz 后,设P 为空间中任意一点,它在xOy 平面上的射影为Q ,用极坐标(ρ,θ)(ρ≥0,0≤θ<2π)表示点Q 在平面xOy 上的极坐标,这时点P 的位置可以用有序数组(ρ,θ,z )(z ∈R )表示,把建立上述对应关系的坐标系叫柱坐标系,有序数组(ρ,θ,z )叫做点P 的柱坐标,记作P (ρ,θ,z ),其中ρ≥0,0≤θ<2π,z ∈R .图4-1-74.直角坐标与柱坐标之间的关系⎩⎨⎧x =ρcos θ,y =ρsin θ,z =z .[思考·探究]1.空间直角坐标系和柱坐标系、球坐标系有何联系和区别?【提示】 柱坐标系和球坐标系都是以空间直角坐标系为背景,柱坐标系中一点在平面xOy 内的坐标是极坐标,竖坐标和空间直角坐标系的竖坐标相同;球坐标系中,则以一点到原点的距离和两个角(高低角、极角)刻画点的位置.空间直角坐标系和柱坐标系、球坐标系都是空间坐标系,空间点的坐标都是由三个数值的有序数组组成.2.在空间的柱坐标系中,方程ρ=ρ0(ρ0为不等于0的常数),θ=θ0,z =z 0分别表示什么图形?【提示】 在极坐标中,方程ρ=ρ0(ρ0为不等于0的常数)表示圆心在极点,半径为ρ0的圆,方程θ=θ0(θ0为常数)表示与极轴成θ0角的射线.而在空间的柱坐标系中,方程ρ=ρ0表示中心轴为z 轴,底半径为ρ0的圆柱面,它是上述圆周沿z 轴方向平行移动而成的.方程θ=θ0表示与zOx 坐标面成θ0角的半平面.方程z =z 0表示平行于xOy 坐标面的平面,如图所示.常把上述的圆柱面、半平面和平面称为柱坐标系的三族坐标面.[质疑·手记]预习完成后,请将你的疑问记录,并与“小伙伴们”探讨交流: 疑问1:_____________________________________________________ 解惑:_____________________________________________________ 疑问2:_____________________________________________________ 解惑:_____________________________________________________(1)已知点M 的球坐标为⎝ ⎛⎭⎪⎫2,3π4,3π4,则点M 的直角坐标为________.(2)设点M 的柱坐标为⎝ ⎛⎭⎪⎫2,π6,7,则点M 的直角坐标为________.【自主解答】 (1)设M (x ,y ,z ), 则x =2sin 3π4·cos 3π4=-1,y =2×sin 3π4×sin 3π4=1, z =2×cos 3π4=- 2.即M 点坐标为(-1,1,-2). (2)设M (x ,y ,z ), 则x =2×cos π6=3, y =2×sin π6=1,z =7. 即M 点坐标为(3,1,7).【答案】 (1)(-1,1,-2) (2)(3,1,7) [再练一题]1.(1)已知点P 的柱坐标为⎝ ⎛⎭⎪⎫4,π3,8,则它的直角坐标为________.(2)已知点P 的球坐标为⎝ ⎛⎭⎪⎫4,3π4,π4,则它的直角坐标为________.【解析】 (1)由变换公式得: x =4cos π3=2, y =4sin π3=23,z =8.∴点P 的直角坐标为(2,23,8). (2)由变换公式得:x =r sin θcos φ=4sin 3π4cos π4=2, y =r sin θsin φ=4sin 3π4sin π4=2, z =r cos θ=4cos 3π4=-2 2. ∴它的直角坐标为(2,2,-22).【答案】 (1)(2,23,8) (2)(2,2,-22)已知正方体ABCD -A 1B 1C 1D 1的棱长为1,如图4-1-8建立空间直角坐标系A —xyz ,Ax 为极轴,求点C 1的直角坐标、柱坐标以及球坐标.图4-1-8【思路探究】 解答本题根据空间直角坐标系、柱坐标系以及球坐标系的意义和联系计算即可.【自主解答】 点C 1的直角坐标为(1,1,1), 设点C 1的柱坐标为(ρ,θ,z ),球坐标为(r ,φ,θ), 其中ρ≥0,r ≥0,0≤φ≤π,0≤θ<2π, 由公式⎩⎪⎨⎪⎧ x =ρcos θ,y =ρsin θ,z =z及⎩⎪⎨⎪⎧x =r sin φcos θ,y =r sin φsin θ,z =r cos φ得⎩⎨⎧ρ=x 2+y 2,tan θ=yx (x ≠0)及⎩⎨⎧r =x 2+y 2+z 2,cos φ=zr ,得⎩⎪⎨⎪⎧ρ=2,tan θ=1及⎩⎨⎧r =3,cos φ=33,结合图形得θ=π4,由cos φ=33得tan φ= 2.∴点C 1的直角坐标为(1,1,1),柱坐标为(2,π4,1),球坐标为(3,φ,π4), 其中tan φ=2,0≤φ≤π.化点M 的直角坐标(x ,y ,z )为柱坐标(ρ,θ,z )或球坐标(r ,θ,φ),需要对公式⎩⎨⎧x =ρcos θ,y =ρsin θ,z =z以及⎩⎨⎧x =r sin θcos φ,y =r sin θsin φ,z =r cos θ进行逆向变换,得到⎩⎪⎨⎪⎧ρ=x 2+y 2,tan θ=yx(x ≠0),z =z以及⎩⎪⎨⎪⎧r =x 2+y 2+z 2,tan φ=y x (x ≠0),cos θ=zr .提醒 在由三角函数值求角时,要先结合图形确定角的范围再求值.[再练一题]2.(1)设点M 的直角坐标为(1,1,1),求它在柱坐标系中的坐标. (2)设点M 的直角坐标为(1,1,2),求它的球坐标.【导学号:98990006】【解】(1)设M 的柱坐标为(ρ,θ,z ),则有⎩⎪⎨⎪⎧1=ρcos θ,1=ρsin θ,z =1,解之得ρ=2,θ=π4.因此,点M 的柱坐标为⎝ ⎛⎭⎪⎫2,π4,1.(2)由坐标变换公式,可得 r =x 2+y 2+z 2=12+12+(2)2=2.由r cos θ=z =2, 得cos θ=2r =22,θ=π4.又tan φ=y x =1,φ=π4(M 在第一象限), 从而知M 点的球坐标为⎝ ⎛⎭⎪⎫2,π4,π4. [真题链接赏析](教材第17页习题4.1第16题)建立适当的球坐标系或柱坐标系表示棱长为3的正四面体的四个顶点.结晶体的基本单位称为晶胞,如图4-1-9(1)是食盐晶胞的示意图(可看成是八个棱长为12的小正方体堆积成的正方体).图形中的点代表钠原子,如图4-1-9(2),建立空间直角坐标系O -xyz 后,试写出下层钠原子所在位置的球坐标、柱坐标.(1) (2)图4-1-9【命题意图】 本题以食盐晶胞为载体,主要考查柱坐标系及球坐标系在确定空间点的位置中的应用.【解】 下层的原子全部在xOy 平面上,它们所在位置的竖坐标全是0,所以这五个钠原子所在位置的球坐标分别为(0,0,0),⎝ ⎛⎭⎪⎫1,π2,0,⎝ ⎛⎭⎪⎫2,π2,π4,⎝ ⎛⎭⎪⎫1,π2,π2,⎝ ⎛⎭⎪⎫22,π2,π4; 它们的柱坐标分别为(0,0,0),(1,0,0),⎝ ⎛⎭⎪⎫2,π4,0,⎝ ⎛⎭⎪⎫1,π2,0,⎝ ⎛⎭⎪⎫22,π4,0.1.已知点A 的柱坐标为(1,0,1),则点A 的直角坐标为________. 【解析】 由点A 的柱坐标为(1,0,1)知,ρ=1,θ=0,z =1,故x =ρcos θ=1,y =ρsin θ=0,z =1,所以直角坐标为(1,0,1).【答案】 (1,0,1)2.设点M 的直角坐标为(-1,-1,2),则它的球坐标为________. 【解析】 由坐标变换公式,r =x 2+y 2+z 2=2.cos θ=z r =22,θ=π4.∵tan φ=yx =1, ∴φ=54π.故M 的球坐标为⎝ ⎛⎭⎪⎫2,π4,5π4.【答案】 ⎝ ⎛⎭⎪⎫2,π4,5π43.已知点P 的柱坐标为⎝ ⎛⎭⎪⎫2,π4,5,点B 的球坐标为⎝ ⎛⎭⎪⎫6,π3,π6,这两个点在空间直角坐标系中点的坐标分别为________.【导学号:98990007】【解析】 设P (x ,y ,z ),则x =2cos π4=1, y =2sin π4=1,z =5,∴P (1,1,5).设B (x ,y ,z ),则x =6sin π3cos π6=6×32×32=364,y =6sin π3sin π6=6×32×12=324,z =6·cos π3=6×12=62. 故B (364,324,62).【答案】 P (1,1,5),B (364,324,62)4.把A (4,π6,2)、B (3,π4,-2)两点的柱坐标化为直角坐标,则两点间的距离为________.【解析】 点A 化为直角坐标为A (23,2,2),点B 化为直角坐标为B ⎝ ⎛⎭⎪⎫322,322,-2. AB 2=⎝ ⎛⎭⎪⎫23-3222+⎝ ⎛⎭⎪⎫2-3222+(2+2)2=12+92-66+4+92-62+16=41-6(6+2).所以AB =41-6(6+2). 【答案】41-6(6+2)我还有这些不足:(1)_____________________________________________________ (2)_____________________________________________________ 我的课下提升方案:(1)_____________________________________________________ (2)_____________________________________________________。
1.9《球坐标系与柱坐标系》教学案
教学目的:
知识目标:了解在柱坐标系、球坐标系中刻画空间中点的位置的方法
能力目标:了解柱坐标、球坐标与直角坐标之间的变换公式.
教学重点:
体会与空间直角坐标系中刻画空间点的位置的方法的区别和联系
教学难点:
利用它们进行简单的数学应用
授课类型:
新授课
教学模式:
启发、诱导发现教学.
教 具:
多媒体、实物投影仪
教学过程:
一、复习引入:
情境:我们用三个数据来确定卫星的位置,即卫星到地球中心的距离、经度、纬度. 问题:如何在空间里确定点的位置?有哪些方法?
学生回顾
在空间直角坐标系中刻画点的位置的方法
极坐标的意义以及极坐标与直角坐标的互化原理
二、讲解新课:
1、球坐标系
设P 是空间任意一点,在oxy 平面的射影为Q ,连接OP ,记| OP |=r ,OP 与OZ 轴正向所夹的角为θ,Ox 轴按逆时针方向旋转到OQ 时所转过的最小正角为ϕ,点P 的位置可以用有序数组),,(ϕθr 表示,我们把建立上述对应关系的坐标系叫球坐标系(或空间极坐标系). 有序数组),,(ϕθr 叫做点P 的球坐标,其中r ≥0,0≤θ≤π,0≤ϕ<2π. 空间点P 的直角坐标),,(z y x 与球坐标),,(ϕθr 之间的变换关系为:
⎪⎪⎩
⎪⎪⎨⎧====++θϕ
θϕθcos sin sin cos sin r z r y r x r z y x 2
222 2、柱坐标系
设P 是空间任意一点,在oxy 平面的射影为Q ,用(ρ,θ)表示点在平面oxy 上的极坐标,点P 的位置可用有序数组(ρ,θ,Z )表示把建立上述对应关系的坐标系叫做柱坐标系.
有序数组(ρ,θ,Z )叫点P 的柱坐标,其中ρ≥0, 0≤θ<2π, z ∈R .
空间点P 的直角坐标(x , y , z )与柱坐标(ρ,θ,Z )之间的变换关系为: 3、数学应用
例1建立适当的球坐标系,表示棱长为1的正方体的顶点.
变式训练
建立适当的柱坐标系, 表示棱长为1的正方体的顶点.
例2.将点M 的球坐标)65,3,
8(ππ化为直角坐标.
变式训练
1.将点M 的直角坐标)2,1,1(--化为球坐标.
2.将点M 的柱坐标)8,3,4(π
化为直角坐标.
3.在直角坐标系中点),,(a a a a (>0)的球坐标是什么?
例3.球坐标满足方程r =3的点所构成的图形是什么?并将此方程化为直角坐标方程.
变式训练
标满足方程ρ=2的点所构成的图形是什么?
⎪⎩⎪⎨⎧===z
z y x θ
ρθρsin cos
例4.已知点M 的柱坐标为),,,
(342π点N 的球坐标为),,,(242π
π求线段MN 的长度.
思考: 在球坐标系中,集合⎪⎩
⎪⎨⎧⎭⎬⎫≤≤≤≤≤≤=πϕπθϕθ202062,,),,(r r M 表示的图形的体积为多少?
三、小结:
本节课学习了以下内容:
1.柱坐标系、球坐标系中刻画空间中点的位置的方法;
2.柱坐标、球坐标与直角坐标之间的变换公式.
四、课后作业:。