机械系统的运动简图设计
- 格式:ppt
- 大小:2.14 MB
- 文档页数:36


第1章机械系统的运动简图设计一、基本内容及要求本章学习的主要内容是:(1)平面运动副及其分类;(2)平面机构运动简图的绘制方法;(3)平面机构自由度的计算。
本章的学习要求:1. 掌握各种平面运动副的一般表示方法。
能较熟练看懂教材中的平面机构运动简图。
通过实验初步掌握将实际机构绘制成机构运动简图的技能。
2. 能够识别平面机构运动简图中的复合铰链、局部自由度和最常见的虚约束。
会运用公式计算平面机构的自由度并判断其运动是否确定。
看懂和绘制平面机构运动简图是本章的重点。
复合铰链、局部自由度和虚约束的判断是个难点。
只要求掌握教材中列举的几种实例,不宜在此花费过多时间。
二、自学指导1. 为了反映机构的真实运动,绘制机构运动简图时,代表回转副的小圆,其圆心必须与相对回转中心重合;代表移动副的滑块,其导路方向必须与相对移动方向一致。
学生应当学会分析由这类构件构成的复杂图形。
例如图1.1所示压缩机机构在铰链C处各构件间的关系如下:构件2—3、3—4间组成回转副,构件3—8、4—5间组成移动副。
2. 对复合较链,应注意:(1)复合铰链是指两个以上回转副中心重合为一,而不应仅仅根据构件汇交数来判断。
例如图1.1铰链E处虽有5、6、7、8四个构件汇交,但它构成两个移动副和一个回转副,故不存在复合铰链。
(2)图1.2所示周转轮系机构中,1、2、3是活动构件,4是机架,构件1、3和4在O点形成复合铰链。
由于齿轮、凸轮等构件习惯于用外形来表示,简图上看不出构件汇交,故这种复合铰链易被忽略。
图1.13. 局部自由度在平面机构中主要出现在有滚子的场合。
在计算自由度时,为了防止错算构件数和运动副数,建议将图1.3,a中的滚子及其安装件固联为一整体,如图1.3,b所示。
图1.2 图1.34. 虚约束比较复杂,不要求深入研究,只要求理解和熟悉以下几个实例:(1)由两构件组成多个导路平行的移动副而产生的虚约束;(2)轮系中的对称部分产生的虚约束;(3)在平行四边形机构中加入一个与某边平行且相等的构件造成轨迹重迭而产生的虚约束(其他类型的轨迹重迭往往需要复杂的数学证明,可不深究);(4)“两构件间组成多个轴线重合的回转副”,这类虚约束通常出现在轮系的侧视图中,在运动平面内绘制的机构运动简图不会出现这类虚约束。

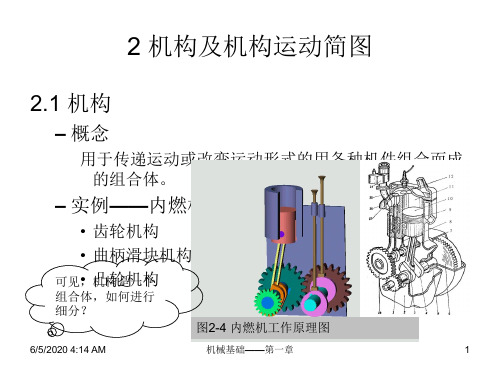
第2章平面机构运动简图及自由度计算机械是替代人类完成各项体力劳动甚至脑力劳动的执行者。
在各种新型机械的设计初期,首先需要采用机械系统运动简图来对比各种运动方案及工作原理,一边从中选出最佳的设计方案。
然后再按照运动要求确定及其各组成构件的主要尺寸,按照强度条件和工作情况确定机构个部分的详细结构尺寸。
机械系统的运动简图设计是设计机械产品十分重要的内容,正确、合理地设计机械系统简图,对于满足机械产品的功能要求,提高性能和质量,降低制造成本和使用费用等是十分重要的。
机械系统要完成比较复杂的运动,一般都需要将若干个机构根据机械系统的运动协调配合的要求组合起来,因此机械系统的运动简图也是机构系统的运动简图。
机械系统的运动简图是用规定的符号,绘出能准确表达机构各构件之间的相对运动关系及运动特征的简单图形。
一般某机构可分为平面机构和空间机构。
平面机构是指各运动构件均在同意平面或相互平行平面内运动的机构。
空间机构是指虽有的机构不完全是相互平行的平面内运动的机构。
本章将着重介绍机构的结构分析。
第一节机构的组成构件任何机器都是由若干个零件组装而成的。
构件是指组成机械的各个相对运动的单元。
构件和零件的概念是有区别的。
构件是机械中的运动单元体,零件则是机械中不可拆分的制造单元体。
构件可以是一个零件,也可以是由两个或两个以上的零件组成。
如图2-1所示的内燃机中的连杆就是由单独加工的连杆体、轴套、连杆头、轴瓦、螺杆、螺母等零件组成的,这些零件分别加工制造,但是当它们装配成连杆后则作为一个整体在发动机内部作往复运动相互之间并不产生相对运动,因此连杆可以看做一个构件。
因此,从运动角度来看,任何机器都是许多独立运动单元组合而成的,这些独立运动单元体称为构件。
从加工制造角度来看,任何机器都是由许多独立制造单元体组合而成的,这些独立制造单元体称为零件。
通常,为了完成同一使命而在结构上组合在一起并协同工作的零件称为部件,如联轴器、减速器等。
2015~ 2016学年第一学期姓名: 班级: 学号: 实验成绩:实验名称实验二机构运动简图的绘制指导老师:一、实验目的1、熟悉并掌握机构运动简图绘制的原理和方法,学会用机构运动简图表达机械系统,2、学会根据实际机械和模型绘制机构运动简图的技能。
二、实验内容1、以指定的四种机构模型为研究对象,进行机构运动简图的绘制。
2、分析所画各机构的构件数、运动副类型和数目,计算机构的自由度。
三、实验设备1、运动机构模型(实验教师指定)。
2、学生自备铅笔、直尺、圆规、橡皮、草稿纸等。
表1 常见机构运动简图两运动构件形成的运动副两构件之一为机架时形成的运动副转动副移动副二副元素构件三副元素构件多副元素构件构件凸轮机构棘轮机构凸轮及其它机构带传动链传动外齿轮内齿轮齿轮机构圆锥齿轮齿轮齿条蜗杆蜗轮四、实验步骤1、确定组成机构的构件数:缓慢转动机构,沿着运动传递的线路仔细看清各构件间的相对运动(有些相互连接构件间的相对运动非常微小),从而确定组成机构的构件数目。
2、确定运动副的类型:根据相互连接的两构件间的接触情况及相对运动特点,确定各个运动副的类型。
3、选定视图平面:一般选择与多数构件运动平面平行的平面为视图平面。
4、绘制机构示意图的草图:凭目测在草稿纸上徒手按规定的运动副代表符号,从原动件开始,按各构件的连接次序,用简单的线条代表构件,逐步画出机构示意图的草图。
用数字1、2、3……分别标准各构件,用字母A、B、C……分别标准各运动副。
5、计算机构的自由度数:同时将计算结果与实际机构的自由度相对照,观察二者是否相符。
机构自由度的计算公式:F=3n-2P L-P H(式中: n为活动构件的数目;P L为低副的数目; P H为高副的数目。
)6、测量机构运动尺寸:对转动副测量回转中心间的相对尺寸;对移动副测量导路方向线和与其有关的其他运动副间的相对尺寸。
7、选取适当的比例尺: 长度比例尺 )()(mm mm l 图纸上所画的长度构件实际长度=μ8、绘制机构运动简图:按一定的比例,用制图工具画出相应机构的运动简图。