第十三章简单机械 第一节 杠杆
- 格式:ppt
- 大小:560.50 KB
- 文档页数:13
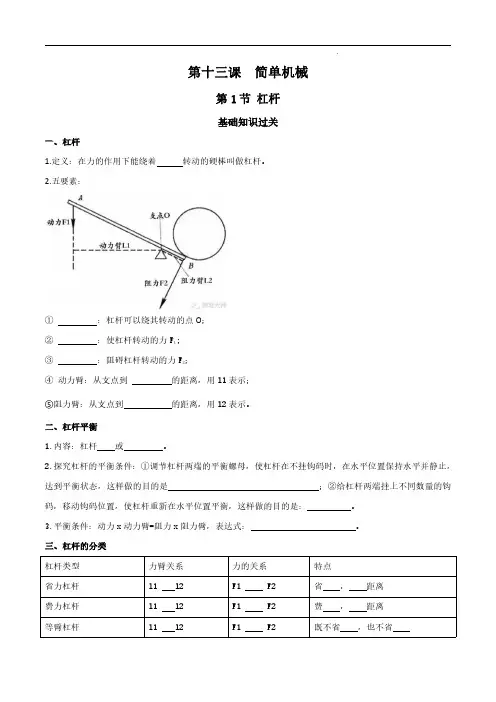
第十三课简单机械第1节杠杆基础知识过关一、杠杆1.定义:在力的作用下能绕着转动的硬棒叫做杠杆。
2.五要素:①:杠杆可以绕其转动的点O;;②:使杠杆转动的力F1;③:阻碍杠杆转动的力F2④动力臂:从支点到的距离,用l1表示;⑤阻力臂:从支点到的距离,用l2表示。
二、杠杆平衡1.内容:杠杆或。
2.探究杠杆的平衡条件:①调节杠杆两端的平衡螺母,使杠杆在不挂钩码时,在水平位置保持水平并静止,达到平衡状态,这样做的目的是;②给杠杆两端挂上不同数量的钩码,移动钩码位置,使杠杆重新在水平位置平衡,这样做的目的是:。
3.平衡条件:动力x动力臂=阻力x阻力臂,表达式:。
三、杠杆的分类杠杆类型力臂关系力的关系特点省力杠杆l1l2F1F2省,距离费力杠杆l1l2F1F2费,距离等臂杠杆l1l2F1F2既不省,也不省高频考点过关考点一:杠杆分类1.(2022•西藏)杠杆在生活中无处不在,如图所示工具在使用过程中属于费力杠杆的是()A.铁皮剪B.定滑轮C.钳子D.船桨2.(2022•济南)小强开启饮料时,瓶起子可视为一个杠杆,如图所示。
下列各图能正确表示其工作原理的是()A.B.C.D.3.(2022•淮安)如图所示,用力打开夹子过程中,标注的夹子支点、动力、阻力正确的是()A.B.C.D.4.(2022•邵阳)某天,“生物”和“物理”两位大师在一起进行体育锻炼。
“生物”大师伸出健硕的手臂对“物理”大师说:“看,我能提起很重的物体哦(如图)!”“物理”大师竖起大拇指说:“真厉害!其实,你的前臂就是物理学中的一根杠杆。
”以下对于这根杠杆在提起重物的过程中,分析合理的是()A.前臂杠杆的支点O在肘关节处B.肱二头肌给桡骨的力F1是阻力C.重物给前臂的力F2是动力D.前臂是一根省力杠杆5.(2021•河南)如图,工人师傅正在使用一根硬棒撬动石头,使用此硬棒()A.省力且省距离B.省力但费距离C.费力且费距离D.费力但省距离6.(2021•哈尔滨)如图所示,小明用撬棍向上撬石头,由于动力臂阻力臂,所以撬棍是一个(选填“省力”或“费力”)杠杆。

作者: 任春[1];李永霞[2]
作者机构: [1]黑河二中;[2]黑河市教研室
出版物刊名: 黑河教育
页码: 25-28页
主题词: 简单机械 物理教科书 九年义务教育 说课内容 初中物理 初级中学 运用知识 培养学生 滑轮 四年制
摘要: 说课内容:《杠杆》,选自九年义务教育四年制初级中学物理教科书中的第十三章《简单机械》的第一节,一课时。
一、教材分析 1.教材的地位及作用 《简单机械》这章知识跟生产和生活有密切联系,学习这章内容可以培养学生运用知识的能力。
而《杠杆》这节课在《简单机械》一章中又是核心和关键,因为滑轮是杠杆的变形,轮。

学科教师辅导讲义课题简单机械—杠杆授课日期及时段1.知道什么是杠杆,能从常见的工具中认出杠杆。
教学目的 2. 通过观察和实验了解杠杆的结构,熟悉有关杠杆的名称及生活中的应用。
3.能用杠杆的原理分析解决简单的有关杠杆平衡的问题。
1.画杠杆的动力臂和阻力臂。
重点难点 2 探究杠杆的平衡条件以及对杠杆平衡条件的理解。
3利用杠杆平衡条件分析解决有关杠杆平衡的问题。
教学内容【本章知识结构】杠杆种类和特点简单机械知识点归纳及应用:一、杠杆:滑轮组合和特点简单机械和功机械效率功功率1、定义:一根硬棒,在力的作用下如果绕着固定点转动,这根硬棒叫做杠杆。
2、杠杆五要素:(1)支点:杠杆绕其转动的点,一般用字母 O表示该点。
(2)动力:使杠杆转动的力,一般用字母 F1 表示。
(3)阻力:阻碍杠杆转动的力,一般用字母 F2 表示。
(力臂:从支点到力的作用线的距离。
)(4)动力臂:从支点到动力作用线的距离,一般用 L1 表示。
( 5)阻力臂:从支点到阻力作用线的距离,一般用字母L2 表示。
3、杠杆作图要点:找到两点一线,两点即支点和力的作用点,一线即力的的作用线,然后从支点作力的作用线的垂线,这条垂线段即力臂。
4、杠杆平衡及平衡条件:(1)杠杆平衡:当杠杆处于静止或匀速转动状态时,就称为杠杆平衡。
(2)杠杆的平衡条件:动力×动力臂=阻力×阻力臂,即F1?L1=F2?L2(这个平衡条件也就是阿基米德发现的杠杆原理)二、杠杆的分类——三种杠杆1、省力杠杆:动力臂 L1>L2 阻力臂动力<阻力特点:省力费距离例:剪铁剪刀,铡刀,起子2、费力杠杆:动力臂 L1< L2 阻力臂动力>阻力特点:费力但省距离例:筷子,镊子,钓鱼竿,理发剪刀3、等臂杠杆动力臂L1=L2阻力臂动力=阻力特点:既不省力也不费力例:天平三、杠杆的应用在我们生活中常见的简单机械中,怎样根据所学知识分析出它属于哪类杠杆呢?【方法】第一步,找出找到支点,动力作用点,和阻力作用点。

物理简单机械与杠杆原理知识点在咱们的日常生活中,物理那可是无处不在,就拿简单机械和杠杆原理来说吧,它们可帮了咱们不少忙,也带来了不少有趣的事儿。
先来说说简单机械,像滑轮、斜面这些东西,可能平时咱们都没怎么留意,但它们可真是默默发挥着大作用。
比如说滑轮吧,你想想看,要是没有滑轮,那些建筑工人要把重重的材料吊到高楼上去,得多费劲啊!还有斜面,每次咱们走在那种有坡度的路上,其实就是在利用斜面的原理。
你看,简单机械是不是就在咱们身边,只是咱们没太在意罢了。
接下来重点讲讲杠杆原理,这可太有意思啦!我记得有一次,我在家想要挪动一个特别重的大箱子。
那箱子死沉死沉的,我一开始使了吃奶的劲儿去推它、拉它,可它就像在地上生了根一样,纹丝不动。
就在我累得气喘吁吁,准备放弃的时候,我突然想到了杠杆原理。
我在家里到处找啊,终于找到了一根长长的木棍。
我把木棍的一端插进箱子底下,然后找了一块石头当作支点。
嘿,你猜怎么着?当我用力压下木棍的另一端时,那原本一动不动的大箱子,居然开始慢慢地挪动了!当时我那个兴奋劲儿啊,就别提了!我继续加力,一点一点地,箱子终于被我挪到了我想要的位置。
这过程中,我可是真切地感受到了杠杆的神奇力量。
通过这次经历,我对杠杆原理有了更深的理解。
你看,杠杆的作用大小,取决于动力臂和阻力臂的长度。
我的那根木棍,动力臂比阻力臂长了不少,所以就能用比较小的力,撬动那个重重的箱子。
而且啊,杠杆原理可不只是能用来挪箱子。
比如说咱们常见的跷跷板,不也是杠杆原理的应用嘛。
还有那种老式的秤,称东西的时候,也是依靠杠杆的平衡来得出重量的。
再想想,钳子也是利用了杠杆原理。
咱们用钳子剪东西的时候,手握住的地方是动力作用点,而夹住东西的那一头就是阻力作用点。
因为动力臂长,阻力臂短,所以咱们轻轻一用力,就能剪断那些硬邦邦的东西。
还有开瓶器,也是个典型的杠杆。
开瓶的时候,手握住的地方用力,通过长长的动力臂,把瓶盖撬起来,多轻松!在生活里,杠杆原理真的是无处不在。

简单机械杠杆
机械杠杆是一种把小力量转换为大力量的器件,可以起到放大实际力的作用。
它是包括铰接杆和把手组成的简单机械结构,杆和把手的距离相当长,形成多级键杆结构,被称为杠杆系统。
本文讨论的是简单机械杠杆,它主要由杆和把手组成,其特点是把手处于杆的一端,另一端为负荷,简单杠杆系统的运动原理不难推导,可以说是常见的四象限运动。
简单机械杠杆的运动原理是:处于杆的一端的把手处作用的力叫做作用力,另一端的负荷受到的拉力叫做受力。
把手和负荷间的距离叫做杆长度,负荷重量叫做重量。
简单杠杆的运动规律可以用下式表示:
$$F_{text{作用力}} = frac{Lcdot F_{text{受力}}}{L+l}$$ 其中,$L$和$l$ 分别为杆长度和把手处距离负荷的距离。
由上式可以看出,把负荷与把手之间的距离越短,把手处的作用力越大。
因此,机械杠杆适合用来放大小的力,可以起到很大的作用。
同时,由于杠杆系统的把手处作用力与负荷处受力之间存在物理比例关系,当把手处作用力发生变化时,负荷处受力也会改变,从而实现线性调节。
- 1 -。

简单机械:杠杆的力学原理杠杆是一种简单机械,它是由一个支点和两个力臂组成的。
杠杆的力学原理是基于力的平衡原理,即力矩的平衡。
在杠杆上,力矩的平衡可以用以下公式表示:力1 × 力臂1 = 力2 × 力臂2其中,力1和力2分别是作用在杠杆上的两个力,力臂1和力臂2分别是力1和力2与支点的距离。
杠杆的力学原理可以用来解决各种力的平衡问题,例如杠杆的平衡、杠杆的放大和杠杆的缩小等。
一、杠杆的平衡当杠杆处于平衡状态时,力1和力2的力矩相等,即力1 × 力臂1 = 力2 × 力臂2。
这意味着,如果一个力在杠杆上的力臂较大,那么另一个力在杠杆上的力臂就应该较小,以保持平衡。
例如,当一个人想要将一个重物从地面上抬起时,可以使用一个杠杆来帮助。
他可以将杠杆的一个端点放在地面上,将重物放在杠杆的另一端。
通过调整重物和支点之间的距离,他可以改变力臂的长度,从而实现平衡。
二、杠杆的放大杠杆的力学原理还可以用来放大力的作用。
当一个力作用在杠杆上时,通过调整力臂的长度,可以使输出力比输入力更大。
例如,当我们使用一个螺丝刀拧紧螺丝时,我们可以使用一个长杠杆来增加力臂的长度,从而使我们需要施加的力更小。
这是因为根据杠杆的力学原理,力1 × 力臂1 = 力2 × 力臂2,当力臂2较大时,力2就会相应地增大。
三、杠杆的缩小与放大相反,杠杆的力学原理也可以用来缩小力的作用。
当一个力作用在杠杆上时,通过调整力臂的长度,可以使输出力比输入力更小。
例如,当我们使用一个钳子夹住一个物体时,我们可以使用一个短杠杆来减小力臂的长度,从而使我们需要施加的力更大。
这是因为根据杠杆的力学原理,力1 × 力臂1 = 力2 × 力臂2,当力臂2较小时,力2就会相应地减小。
总结:杠杆是一种简单机械,它的力学原理是基于力的平衡原理。
通过调整力臂的长度,可以实现力的平衡、放大和缩小。