步行周期中的运动学分析1尚江
- 格式:pptx
- 大小:1.31 MB
- 文档页数:39

步态分析之步行周期步态分析是一种评估人类行走的方法,它用于测量和记录步行周期中的各个关键事件和参数。
步态分析对于研究和评估异常步态或者康复工作是非常有用的。
其中,步行周期是步态分析中最基本和重要的参数之一,它描述了一个完整行走运动的时间。
步行周期通常被定义为从一个脚的接触地面开始,到下一次该脚再次接触地面为止的时间间隔。
一个完整的步行周期由两个步态相组成,分别是左脚周期和右脚周期,二者组成了一个完整的双足行走周期。
在步行周期中,包含了多个重要事件,如接触地面、摆动相、支撑相等。
接触地面是指脚触碰地面并开始支撑身体重量的时刻。
摆动相是指脚从接触地面到再次接触地面之间的时间段,也就是脚在空中的时间。
支撑相是指脚接触地面并支撑身体重量的时间段,也就是脚在地面上的时间。
步行周期与步行速度有一定的关联。
通常情况下,步行周期会随着步行速度的增加而减少。
这是因为在较快的速度下,人们倾向于加快步行的频率,从而减少了每步的时间。
而在较慢的速度下,步行周期会相对较长,因为人们会较慢地行走,每步花费更多的时间。
步行周期的测量和分析对于评估和判断步态异常非常重要。
例如,步态周期的异常可能是步伐不稳、踩踏不准或行走速度不稳定等问题的表现。
通过测量和分析步行周期,可以更好地了解和评估这些问题的严重程度,并为康复或矫正提供依据。
在步态分析领域,有多种方法可以测量和分析步行周期。
其中最常用的方法是使用传感器技术,如压力传感器、加速度计和陀螺仪等。
这些传感器可以被放置在鞋子、腿部或其他身体部位上,通过检测动作和运动来记录和分析步行周期。
现在,也有一些智能手表或手机应用程序可以通过内置传感器来测量和分析步行周期。
总结起来,步行周期是步态分析中最基本和重要的参数之一、它描述了一个完整行走运动的时间,并包含了多个重要事件和参数。
通过测量和分析步行周期,可以更好地评估和判断步态异常,并为康复或矫正提供依据。
步行周期的测量和分析通常使用传感器技术,如压力传感器、加速度计和陀螺仪等。
走的生物力学原理
人体行走的生物力学原理是行走过程中藉助肌肉活动所耗费的能量最小化的原理。
在
正常步态的走路过程中,大腿的关节活动将产生上下前进的运动,并借此带动其他关节的
活动。
具体来说,人体行走的运动机制是把躯干的重量分成腿的动能和静力,通过空间的运
动来开始、改变和变化肌肉活动。
一般地,一次行走会发生REFERENCE次关节活动,但大
多数人行走只需4步:(1)滑行阶段:脚掌着地,通过膝关节和踝关节控制膝腿上半身;(2)后跟触地阶段:膝静止,脚踝关节伸张,踝volzfolle距离地面最快;(3)吸引阶段,上半身迅速向前,脚踝关节加力撑起;(4)前跟触地阶段:膝静止,脚踝关节屈曲,提供新的推力。
这4步形成的原理,也被称为动态平衡模型,被广泛应用于行走机器人、
静态平衡的研究和人类的生物力学学习中。
研究表明,肌肉力大致可以分为直行和转动两种,正常步态中,会出现一种相互促进
的力学模式,即由三个相互作用的立体铰件——膝腿、足跟和膝足三节棒组成的关节——产生连续的循环力学活动。
在此情况下,肌肉活动中的能量消耗最小,从而实现最低
的能量损耗。
此外,在行走的自然步态中,脚尖收缩周期较短,可以让整个身体产生更好的节奏感,同时腹肌也能产生更好的协助作用,以稳定身体。
因此,步态最符合生物力学原理的步态
是“脚尖收缩,腹部一起收紧”。
总之,人体行走的生物力学原理是尽可能地最小化肌肉活动消耗的能量,实现最大化
的行走效率,充分发挥身体各部位的协调作用,以达到最佳的自身运动效果。
【康复评定】步态分析康复评定,一文读懂步行周期指行走过程中足地至该侧足跟再次着地时所经过的时间。
每一侧下散有其各自的步行周期。
每一个步行周期分为站立相和迈步相两个阶段。
站立相又称支撑相为足底与地面接抽的期边远步相亦称摆动根指支离开地面向动的阶。
站步行周期的60%短步相约占其中的40%一条腿与地面接触并负重时称“单支撑期体重从一侧下肢向另一侧下肢传递,双足同时与地面接触时称为“双支撑期”。
(1)首次着地:步行周期和站立相的起始点指足跟或足底的其他部位第一次与地面接触的瞬间。
正常人行走时的首次着地方式为足跟着地。
不同的病理步态中,首次着地方式表现各异,如前脚掌(即跖骨头)着地、足底外侧缘着地、足跟与前脚掌同时着地。
(2)负荷反应期:指足跟着地后至足底与地面全面接触瞬间的一段时间,即一侧足跟着地后至对侧下肢足趾离地时(0~15%步行周期),为双支撑期,是重心由足跟转移至足底的过程,又称承重期,指正常行走时足跟着地至膝关节屈曲角度达到站立相期间的最大值(约发生在10%~15%步行周期)。
(3)站立中期:指从对侧下肢离地至躯干位于该侧(支撑)腿正上方时(15%~40%步行周期),为单腿支撑期,此时重心位于支撑面正上方。
(4)站立末期:为单腿支撑期,指从支撑腿足跟离地时到对侧下肢足跟着地(40%~50%步行周期)。
(5)迈步前期:指从对侧下肢足跟着地到支撑腿足趾离地之前的一段时间(50%~60%步行周期),为第二个双支撑期。
(6)迈步初期:从支撑腿离地至该腿膝关节达到最大屈曲时(60%~70%步行周期)。
此阶段主要目的是使足底离开地面(称为足廓清),以确保下肢向前摆动时,足趾不为地面所绊。
(7)迈步中期:从膝关节最大屈曲摆动到小腿与地面垂直时(70%~85%步行周期)。
保持足与地面间的距离仍是该期的主要目的。
(8)迈步末期:指与地面垂直的小腿向前摆动至该侧足跟再次着地之前(85%~100%步行周期)。
该期小腿向前摆动的速度减慢并调整足的位置,为进入下一个步行周期做准备。
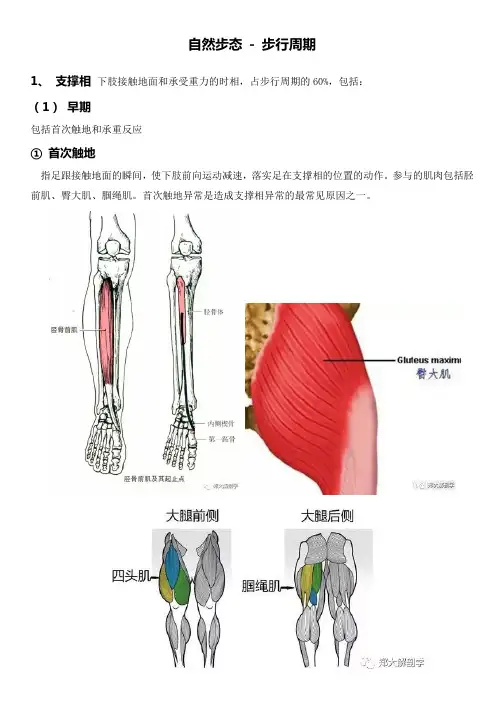
自然步态 - 步行周期1、 支撑相 下肢接触地面和承受重力的时相,占步行周期的60%,包括:(1) 早期包括首次触地和承重反应① 首次触地指足跟接触地面的瞬间,使下肢前向运动减速,落实足在支撑相的位置的动作。
参与的肌肉包括胫前肌、臀大肌、腘绳肌。
首次触地异常是造成支撑相异常的最常见原因之一。
② 承重反应指首次触地之后重心由足跟向全足转移的过程。
参与的肌肉包括股四头肌、臀中肌、腓肠肌。
(2)中期支撑足全部着地,对侧足处于摆动相,是唯一单足支撑全部重力的时相,正常步速时大约为步行周期的38%~40%。
参与的肌肉主要为腓肠肌和比目鱼肌。
下肢承重力小于体重或身体不稳定时此期缩短,以将重心迅速转移到另一足,保持身体平衡。
(3)末期指下肢主动加速蹬离(push off)的阶段,开始于足跟抬起,结束于足离地约为步行周期的10%~12%。
此阶段身体重心向对侧下肢转移,又称为摆动前期。
参与的肌肉为腓肠肌和比目鱼肌(等长收缩)、股四头肌和髂腰肌(向心性收缩)。
2、摆动相下肢在空中向前摆动的时相,占步行周期的40%,包括:(1)摆动初期:主要的动作为足廓清地面和屈髋带动屈膝,加速肢体前向摆动。
参与的肌肉为胫前肌、髂腰肌、股四头肌。
如果廓清地面障碍(如足下垂),或加速障碍(髂腰肌和股四头肌肌力不足),将影响下肢前向摆动,导致步态异常。
(2)摆动中期:从膝关节最大屈曲到小腿与地面垂直。
足廓清仍然是主要任务。
参与的肌肉主要为胫前肌,保持踝关节背屈。
(3)摆动末期:主要任务是下肢前向运动减速,准备足着地的姿势。
参与的肌肉包括腘绳肌、臀大肌、胫前肌、股四头肌。
正常人站立姿势的特点是:支撑面窄,质量中心位置高,以稳定左右对称的稳定支撑面为基础的下肢、躯干和头部进行抗重力伸展活动,保持着直线站立的姿势控制。
中风患者,下肢、躯干、和头部进行抗重力伸展活动弱化,骨盆前倾髋关节伸展不充分,瘫痪侧骨盆后撤,膝关节过伸,多伴有足下垂内翻,难以形成左右对称的支撑面。
步态周期的八个分期
步态周期是一种步行模式,它由八个分期组成。
第一个阶段是腓肠肌反射阶段。
当运动者的脚踩到地板的时候,腓肠肌就会发生反应,从而帮助运动者保持平衡和稳定。
第二个阶段是受力阶段。
在这个阶段,当受脚底部压力时,下肢肌肉会发生反应,制造向前推动所需的力量。
第三个阶段是射程定位阶段。
在这个阶段,运动者会意识到腿部的开端和结束点,控制腿的张弛,有助于到达预定终点。
第四个阶段是步幅定位阶段。
在这个阶段中,运动者会正确地调整步态步幅和控制,以保持正确的步态幅度。
第五个阶段是腿部运动阶段。
在这个阶段,运动者会通过肌肉活动来控制双腿移动,从而实现步态推进。
第六个阶段是能量积聚期。
在这个阶段,腿部肌肉会将能量积聚起来,以帮助运动者维持步态的稳定性。
第七个阶段是双腿运动阶段。
在这个阶段,两条腿交叉运动,一前一后,配合着彼此,以实现自然步态的流畅运动。
最后一个阶段是共同推动阶段。
在这个阶段,两腿的运动围绕腰部的动作完成,以最大效率地推动步态运动,有助于改善施加动力方面的精度。
每一个阶段都有其独特的功能,这些阶段之间有利于实现有效和高效的运动。
步态周期是非常重要的,能够帮助运动者学习正确的步态,更好地控制运动姿势和步态,从而提高跑步效果。

人走路的运动规律
人走路的运动规律可以用力学的原理来解释。
当我们走路时,我们的身体通过一系列的动作来推动我们向前移动。
首先,我们需要施加一个向前的推力来克服摩擦力。
当我们将脚放在地面上时,我们的肌肉会收缩,使我们的脚踏在地面上。
这个过程中,我们的身体会向前倾斜,将重心移到前脚上。
接下来,我们的脚会推开地面,产生一个向后的反作用力。
根据牛顿第三定律,这个反作用力会导致我们向前移动。
同时,我们的另一只脚会抬起,并向前摆动,准备着陆。
当我们的抬腿脚着陆时,我们的身体会再次向前倾斜,将重心转移到这只脚上。
这个过程会不断重复,形成我们的步态。
人走路的速度取决于步幅(每一步的长度)和步频(每分钟迈出的步数)。
通常,人的步幅和步频会根据行走的需求和个体的特点而有所不同。
总之,人走路的运动规律涉及身体的倾斜、双脚的交替着陆和推动以及重心的移动。
这些过程是通过肌肉的收缩和放松来实现的,遵循力
学原理和牛顿第三定律。
步态分析完整版步态分析是研究人类行走过程中身体各部位运动规律和协调性的科学方法。
它通过观察和分析人的行走姿态,评估人的运动功能,帮助医生、康复师和运动教练制定个性化的治疗方案和训练计划。
本完整版文档将详细介绍步态分析的基本概念、方法、应用以及最新研究成果。
一、基本概念1. 步态周期:行走过程中,从一侧脚跟触地到下一次该脚跟触地的整个过程,称为一个步态周期。
一个完整的步态周期可以分为两个阶段:支撑相和摆动相。
2. 支撑相:指脚与地面接触的时间段,占整个步态周期的60%左右。
在这个阶段,身体的重心从一侧脚转移到另一侧脚。
3. 摆动相:指脚离开地面向前摆动的阶段,占整个步态周期的40%左右。
在这个阶段,身体的重心向前移动。
4. 步态参数:包括步长、步频、步宽、步速等。
这些参数可以反映一个人的行走能力和运动状态。
二、步态分析方法1. 观察法:通过肉眼观察行走过程中的姿态和动作,评估步态的异常情况。
这种方法简单易行,但主观性强,误差较大。
2. 动态足迹分析:通过测量行走过程中脚与地面接触的痕迹,分析步态的稳定性和协调性。
这种方法可以提供较为客观的数据,但无法观察整个行走过程。
3. 三维运动捕捉技术:利用多个摄像头捕捉行走过程中身体各部位的运动轨迹,三维模型,进行详细分析。
这种方法可以提供最全面、最精确的数据,但成本较高,技术要求较高。
4. 动力分析:通过测量行走过程中地面反作用力和关节力矩,分析步态的动力学特征。
这种方法可以深入了解行走过程中的能量消耗和肌肉活动,但需要专业的设备和技术支持。
三、步态分析应用步态分析在临床医学、康复医学、运动训练等领域具有广泛的应用价值。
例如:1. 诊断神经系统疾病:通过步态分析,可以早期发现帕金森病、脊髓损伤等神经系统疾病,为治疗提供依据。
2. 评估康复效果:在康复训练过程中,通过步态分析,可以实时监测患者的行走能力变化,评估康复效果,调整训练方案。
3. 优化运动训练:对于运动员和健身爱好者,步态分析可以帮助发现行走过程中的不足,制定针对性的训练计划,提高运动表现。
步行周期名词解释步行周期是指在行走过程中所完成的一系列动作的循环。
它包括步行的各个阶段和步伐的变化。
步行周期通常被划分为两个主要的阶段:支撑期和摆动期。
在支撑期,脚接触地面并承担身体重量;在摆动期,脚从地面脱离并向前摆动,准备下一次支撑期。
支撑期通常又被细分为反击期、中足期和后足期。
在反击期,脚跟首先接触地面,身体开始向前倾斜,脚掌向下弯曲,脚趾发生抓地动作。
在中足期,整个足弓与地面充分接触,身体通过支撑脚迅速地移动到脚掌部位。
在后足期,身体完全传递到支撑脚,脚掌开始推进身体向前的移动。
摆动期通常细分为前摆期和后摆期。
在前摆期,支撑脚开始从地面脱离,下肢通过髋关节的屈曲将脚抬起。
在后摆期,膝关节逐渐伸直,小腿开始向前摆动,以推动身体向前。
步伐的变化是步行周期中一个重要的方面。
步伐通常由两个连续的支撑脚完成。
在步伐周期中,两个支撑脚交替起作用,其中一个脚开始支撑期,而另一个脚则处于摆动期。
步伐周期的长短可以通过踏地频率(步数)和步长来描述。
踏地频率指的是一分钟内脚接触地面的次数,而步长则是从前脚跟到后脚跟的距离。
步行周期的研究对于理解步行的运动机理以及改善步行能力和身体恢复非常重要。
通过对步行周期的分析,可以了解到身体在不同阶段的运动特征和肌肉的协同作用。
这对于康复治疗、运动训练和机器人技术的发展都具有指导意义。
总而言之,步行周期是指步行过程中所完成的一系列动作的循环,包括支撑期和摆动期两个主要阶段,以及反击期、中足期、后足期、前摆期和后摆期等具体阶段。
步行周期的研究对于了解步行机理和改善步行能力具有重要意义。
步行和上肢动力链的关系人的步行是一系列非常复杂、协调的动作。
步行周期分为两个主要阶段:支撑相和摆动相。
一个步行周期是从一侧足跟首次触地开始,经过摆动相,以同侧足跟再次触地结束。
支撑相可细分为足跟着地期、支撑相中期和推进期。
支撑相是步行周期的负重阶段。
它由足跟着地开始,以同侧足趾离地结束。
摆动相以足趾离地开始,并以足跟着地结束。
据估计支撑相约占一个步行周期的60%,摆动相约占40%。
足跟着地支撑相右脚足跟着地之前身体的位置是右侧髋关节屈曲,膝关节伸展,踝背伸,足内翻。
在胫骨后肌的帮助下,胫骨前肌保持踝/足处于背伸和内翻的位置。
在正常步态中,足跟着地时,足以约2°的内翻接触地面。
正常足部运动,距下关节会由内旋5°~6°运动至内旋3°~4°,这会使足起到“移动适配器”的作用。
外部核心的肌筋膜连接由于踝背伸和足内翻,胫骨前肌成为肌筋膜链系统的一部分。
这个肌筋膜链从胫骨前肌起点开始,然后经腓骨长肌再到其外侧的肌肉起点和腓骨头。
这个骨性标志也是股二头肌的附着点。
肌筋膜链随着股二头肌延伸至其起点——坐骨结节,在此处肌肉通过骶结节韧带附着在坐骨结节上;通常股二头肌直接附着于此韧带而不是坐骨结节。
然后,肌筋膜链移行为骶结节韧带,附着在骶骨的下方连接到对侧多裂肌和竖脊肌,一直延伸到枕骨。
这条肌筋膜链被称为后纵链。
在足跟着地接触地面之前,踝背伸就已经激活了股二头肌和腓骨长肌。
因此,这种共同收缩形成的胸腰椎筋膜“关闭”机制成为稳定下肢的一种手段。
使必要的动能得以储存,并在随后的步行周期的推进阶段得到释放。
上述的后纵链收缩紧张形成的张力,将通过股二头肌集中到骶结节韧带上。
这种连接将有助于骶髂关节的力封闭机制。
同时右侧髂骨在摆动相向后旋转,因此骶结节韧带张力增加,这将有助于关节的力量闭合。
由于股二头肌的收缩及右侧髋骨向后旋转,使右骶结节韧带变得紧张;同时,左侧髖骨向前旋转,骶骨绕左斜轴旋转。
步态周期划分及步态分析方法的演变“双足直立行走”,是人类进化史上的第一次重大转变,使得人类这一物种从其他灵长类中单独进化出来。
其他双足站立的物种(如鸟类、袋鼠等)因大多仅靠两条腿蹒跚行走或跳来跳去,因此不可称为“双足直立行走”。
可见,人类的行走方式是如此特别。
本篇文章的对象主要是人类,包括人类的步态中的一些细节以及一些分析步态的方法。
1. 步态释义“步态”(Gait)一词最早是用于描述马,因为其是四足动物有着比人类更明显的步态(行走、小跑、慢跑、疾驰等)。
现如今步态通常定义为:一种利用上下肢的循环运动进而向前移动身体的技能。
然而,在大多数步态分析的文献中,通常交替使用“步态”、“行走”和“走路”这三个词。
但其实,“步态”与后两者其实是有区别的。
“步态”描述的是“行走的方式或风格”,而不是行走过程本身。
2. 步态周期的划分每个人身体结构、年龄、性别等都有着各自的特点,因此步态也会有不同的特点,但总的来说,正常的步态周期都遵循以下的划分。
一侧腿足跟首次着地到再次着地即为一次步态周期。
一次正常的步态周期中存在7个关键时刻,即足跟触地、对侧足脚趾离地、足跟离地、对侧足跟骨触地、脚趾离地、双足相邻、胫骨垂直地面(图1)。
这7个关键时刻将一个完整的步态周期分为7个不同的时期(图1),即初始着地期(Initial contact)、支撑反应期(Loading response)、中点支撑期(Mid stance)、支撑后期(Terminal stance)、摆动前期(Pre-swing)、摆动早期(Initial swing)、摆动中期(Mid-swing)与摆动后期(T erminal swing)。
3. 步态分析释义步态分析可以定义为观察、记录、分析和解释作为步态技能一部分的运动模式的一套程序。
传统上,步态分析的目的是收集信息,以了解控制、改善表现、诊断运动障碍以及评估治疗和康复计划。
临床步态分析可以进一步定义为记录和解释步态生物力学测量的过程,以了解疾病和功能障碍的影响。