《鲁棒控制》-3-H无穷控制理论
- 格式:pdf
- 大小:317.87 KB
- 文档页数:28
1
鲁棒控制问题第三讲:
2
非结构不确定性的引入
讨论非结构不确定性的描述更加重要,这主要有以下两个方面的原因:
¾在控制系统设计中采用的所有控制对象模型,由于需要覆盖未建模的动态特性,均应该包括某些非结构化的不确定性,这是从给定的控制问题中自然引出来的;¾对于一种特定类型的非结构不确定性,可以找到一种既简单又具有一般性的分析方法。
C 1
C 1
11
)
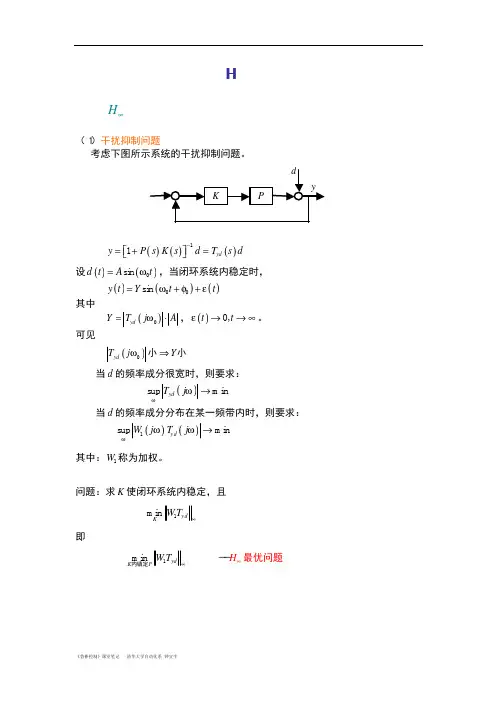
Ωωεω∞
<∈,2()
T j ωεω∞
<,
鲁棒控制理论及应用中南大学信息科学与工程学院吴敏
31
谢谢各位!Thank you!
2007年10月9日。

控制理论中的最优控制与鲁棒控制控制理论是研究如何设计系统,使其行为符合确定性或随机性要求的一门学科。
在控制理论中,最优控制和鲁棒控制是两个重要的概念。
它们分别代表着在不同情况下如何有效地控制系统,保证系统稳定性和性能。
最优控制是指在给定约束条件下,通过调节控制器的参数,使系统的性能达到最优。
最优控制问题可以用数学工具和优化方法来解决,通常包括确定最优控制器的结构和参数,以实现系统的最佳性能。
最优控制理论在航空航天、自动驾驶、机器人等领域有着广泛的应用,能够有效提高系统的鲁棒性和性能。
鲁棒控制则是指在系统存在各种不确定性和干扰时,仍能保持系统的稳定性和性能。
鲁棒控制的设计考虑系统不确定性的影响,能够有效应对各种外部扰动和环境变化,保证系统在不确定性条件下的稳定性和鲁棒性。
鲁棒控制理论在工业控制、气候控制、金融领域等有着广泛的应用,能够有效应对系统面临的各种挑战和风险。
在实际工程中,最优控制和鲁棒控制通常结合起来,以实现系统的高性能和可靠性。
最优控制能够提高系统的性能和效率,而鲁棒控制则能够保证系统在面对各种不确定性和干扰时仍能正常运行。
通过最优控制和鲁棒控制的结合,可以有效提高系统的鲁棒性和性能,实现系统在各种复杂环境中的稳定运行。
综上所述,控制理论中的最优控制与鲁棒控制是两个互补的概念,分别强调系统在确定性条件和不确定性条件下的优化控制。
它们在实际工程中有着重要的应用,能够有效提高系统的鲁棒性和性能,保证系统稳定运行。
通过不断研究和应用最优控制和鲁棒控制理论,可以为各种自动控制系统的设计和优化提供重要的理论支持和指导。

鲁棒控制论文:具有输入饱和的关联时滞大系统的研究【中文摘要】时滞关联大系统的研究是近年来控制领域的一个热点,并且日益受到人们的关注。
在一些条件下,有些问题只能用时滞关联大系统加以描述,例如:航空航天系统模型等。
输入含有饱和因子是一个普遍的非线性现象,若不考虑输入饱和因子而设计控制器,则无法保证闭环系统的稳定性。
近年来,已有文献对具有输入饱和的大系统进行研究,而对具有输入饱和的时滞关联大系统的研究却并不多见。
论文研究了具有输入饱和的时滞大系统的控制问题,采用Lyapunov方法,结合线性矩阵不等式理论,给出系统的稳定条件及H∞控制器、无源控制器和H∞保性能控制器的设计方法。
论文的主要研究内容如下:首先,研究了一类具有饱和因子的滞后关联大系统的分散控制问题,并给出了分散控制状态反馈控制器的设计方法。
其次,研究了一类具有输入饱和的关联时滞大系统的无源控制问题。
并给出了无源化状态反馈控制器的设计方法。
接着,研究了一类具有输入饱和的多时滞大系统的H∞控制问题。
给出了状态反馈控制器的存在条件和设计方法,并通过数值算例说明该方法的有效性。
最后,针对一类具有输入饱和的时滞大系统,研究了该系统的H∞保性能控制器设计问题。
通过构造Lyapunov函...【英文摘要】The study of time-delay large-scale interconnected system becomes a hotspot in the field of control, and has attracted more and more researchers. Under someconditions,some problems can only be described by time-delay large-scale interconnected system, such as aerospace system model and so on. Input saturation factor is a general non-linear phenomenon. Without considering the input saturation factor to design a controller, the stability of closed-loop system can not be ensured. In recent years, there are so...【关键词】鲁棒控制 H∞控制无源控制非线性扰动多时滞不确定线性矩阵不等式(LMI)【英文关键词】Time-delay large-scale system decentralized control H∞control Passive control Guaranteed cost control Input saturation Linear matrix inequalities (LMI)【索购全文】联系Q1:138113721 Q2:139938848【目录】具有输入饱和的关联时滞大系统的研究摘要5-6Abstract6-7第1章绪论10-20 1.1 大系统及关联大系统的产生和应用背景及理论发展10-13 1.1.1 大系统及关联大系统的产生和应用背景10-12 1.1.2 大系统及关联广义大系统的理论发展12-13 1.2 带时滞和不确定的大系统及关联大系统的理论研究13-16 1.3 具有输入饱和的时滞关联大系统的研究现状16-17 1.4 论文的主要工作和结构安排17-20第2章具有输入饱和因子的滞后关联大系统的分散控制20-30 2.1 引言20 2.2 系统描述与准备20-22 2.3 分散控制器的设计22-27 2.4 数值算例及仿真27-29 2.5 结束语29-30第3章具有输入饱和的关联时滞大系统的无源控制30-40 3.1 引言30 3.2 系统描述与准备30-31 3.3 系统无源控制31-36 3.4 数值算例及仿真36-39 3.5 结束语39-40第4章具有输入饱和的多时滞大系统的H∞控制40-54 4.1 引言40 4.2 系统描述与准备40-42 4.3 H∞控制器的设计42-50 4.4 数值算例及仿真50-53 4.5 结束语53-54第5章具有输入饱和的时滞大系统的H∞保性能控制54-62 5.1 引言54 5.2 系统描述与准备54-55 5.3 H∞保性能控制器55-60 5.4 数值算例60-61 5.5 结束语61-62结论62-64参考文献64-70攻读硕士学位期间承担的研究任务与主要成果70-71致谢71-72作者简介72出师表两汉:诸葛亮先帝创业未半而中道崩殂,今天下三分,益州疲弊,此诚危急存亡之秋也。
非线性系统的鲁棒性控制一、引言现代控制理论中,非线性系统的鲁棒性控制一直是研究的热点之一。
非线性系统因为其复杂的特性,往往不容易被精确地建模和控制,因此,鲁棒性控制成为一种有效的方法。
本文将从非线性系统的定义入手,介绍非线性系统在鲁棒性控制中的应用和相关理论。
二、非线性系统的定义非线性系统是指,其输入和输出之间的关系不是线性的,其中包括的非线性元素很多,比如幂函数、三角函数、指数函数等。
与线性系统不同,非线性系统具有以下几个特点:1. 非线性系统的系统函数是非线性的,即系统的状态方程和输出方程是非线性的;2. 非线性系统的稳定性分析和控制设计往往比较复杂,需要使用数值模拟和优化算法等方法进行处理;3. 非线性系统的动态行为具有很多非线性效应,比如不稳定性、混沌和复杂多样的周期运动等。
三、非线性系统的鲁棒性控制非线性系统的鲁棒性控制是指,对于具有不确定参数和外部干扰的非线性系统进行控制,并保证其稳定性和性能的方法。
在实际应用中,非线性系统的鲁棒性控制被广泛应用于工业自动化、机器人控制、航空航天等领域。
非线性系统的鲁棒性控制包括以下几个方面:1. 鲁棒控制器的设计:在非线性系统中,我们通常使用鲁棒控制器来设计控制方案。
其中,鲁棒控制器是指一种能够对非线性系统的不确定性进行补偿的控制器。
常用的鲁棒控制器包括H∞控制器、滑模控制器、自适应控制器等。
2. 鲁棒性分析和验证:针对非线性系统的不确定性和外部干扰,需要对鲁棒性进行分析和验证。
其中,鲁棒分析是指确定鲁棒性参数的过程,鲁棒验证是指通过实验和仿真等方法验证鲁棒性的有效性。
3. 鲁棒性优化和调试:鲁棒性控制的优化和调试是非常重要的。
在控制系统设计过程中,需要考虑系统参数、系统耐干扰性、系统稳定性以及过渡过程等方面。
四、非线性系统的鲁棒控制策略(1)H∞控制H∞控制是一种广泛应用于非线性系统的鲁棒控制策略。
该方法通过数学分析和机理推导的方法,能够将非线性系统的模型转换为标准的H∞控制器模型,并对其进行分析和设计。

鲁棒控制的发展与理论摘要:首先介绍了鲁棒控制的发展过程,之后主要介绍了H∞控制理论、μ理论的发展、研究内容和实际应用,和鲁棒控制尚待解决的问题及研究热点。
关键词:鲁棒控制理论、H∞控制理论、μ理论、分析、综合1 概述传统控制器都是基于系统的数学模型建立的,因此,控制系统的性能好坏很大程度上取决于模型的精确性,这正是传统控制的本质。
现代控制理论可以解决多输入、多输出( MIMO )控制系统地分析和控制设计问题,但其分析与综合方法也都是在取得控制对象数学模型基础上进行的,而数学模型的精确程度对控制系统性能的影响很大,往往由于某种原因,对象参数发生变化使数学模型不能准确地反映对象特性,从而无法达到期望的控制指标,为解决这个问题,控制系统的鲁棒性研究成为现代控制理论研究中一个非常活跃的领域。
简单地说,鲁棒控制( Robust Control )就是对于给定的存在不确定性的系统,分析和设计能保持系统正常工作的控制器。
鲁棒振定是保证不确定性系统的稳定性,而鲁棒性能设计是进一步确定保有某种指标下的一定的性能。
根据对性能的不同定义,可分为稳定鲁棒性和性能鲁棒性。
以闭环系统的鲁棒性作为目标设计得到的固定控制器称为鲁棒控制器。
鲁棒控制自其产生便得到了广泛的注目和蓬勃发展。
其实人们在系统设计时,常常会考虑到鲁棒性的问题。
当前这一理论的研究热点是在非线形系统中控制问题,另外还有一些关于鲁棒控制的理论如结构异值理论和区间理论等。
2 鲁棒控制理论的发展最早给出鲁棒控制问题解的是Black在1927年给出的关于真空关放大器的设计,他首次提出采用反馈设计和回路高增益的方法来处理真空管特性的大范围波动。
之后,Nquist( 奈奎斯特)频域稳定性准则和Black回路高增益概念共同构成了Bode( 伯德)的经典之著中关于鲁棒控制设计的基础。
20世纪60年代之前这段时期可称为经典灵敏度设计时期。
此间问题多集中于SISO(单变量)系统,根据稳定性、灵敏度的降低和噪声等性能准则来进行回路设计。
第二章鲁棒控制理论概述2.1鲁棒控制理论概述2.1.1 系统不确定性和鲁棒性控制科学所要解决的主要问题之一是针对被控对象,设计合适的控制器,使闭环系统稳定或达到一定的性能指标要求。
它经历了经典控制理论和现代控制理论两个发展阶段。
无论是经典控制理论还是现代控制理论,它们的一个明显的特点是建立在精确的数学模型基础之上。
但是,在实际应用中存在着许多不确定性,具体体现在:(1)参数的测量误差。
由于测量技术的限制,许多参数的测量值可能有相当大的误差。
尤其是某些涉及热力学、流体力学和空气动力学,以及化学反应过程的参数,往往很不容易测准,或者需要付出昂贵的代价才能测准;(2)环境和运行条件的变化。
这往往是不确定性产生的最重要的原因。
例如,内部元器件的老化;电气设备的电阻因温升而改变;炼钢炉因炉壁渐渐被钢水腐蚀变薄而导致导热系统的变化;飞机和导弹在高空或低空以高速或低速飞行时其空气动力学参数的变化非常剧烈,甚至由于燃料消耗造成导弹质量的变化和质心的位移,这些都会造成其参数较大的变化;(3)人为的简化。
为了便于研究和设计,人们往往有意略去系统中一些次要因素,用低阶的线性定常集中参数模型来代替实际的高阶、非线性甚至是时变和分布参数的系统,这样势必要引入系统模型的不确定性。
因此,在控制系统的设计过程中不可避免的问题是:如何设计控制器,使得当一定范围的参数不确定性及一定限度的未建模动态存在时,闭环系统仍能保持稳定并保证一定的动态性能,这样的系统被称为具有鲁棒性。
2.1.2鲁棒控制理论的发展概况鲁棒控制理论正是研究系统存在不确定性时如何设计控制器使闭环系统稳定且满足一定的动态性能。
自从1972年鲁棒控制(Robust Contr01)这一术语首次在期刊论文中出现以来,已有大量的书籍详细的阐述了鲁棒控制理论的产生、发展及研究现状。
鲁棒控制的早期研究常只限于微摄动的不确定性,都是一种无穷小分析的思想。
1972年鲁棒控制(Robust Control)这一术语首次在期刊论文中出现。