外文翻译 ---建立一个自动车辆车牌识别系统
- 格式:doc
- 大小:49.50 KB
- 文档页数:10
外文文献翻译(含:英文原文及中文译文)文献出处:Gao Q, Wang X, Xie G. License Plate Recognition Based On Prior Knowledge[C]// IEEE International Conference on Automation and Logistics. IEEE, 2007:2964-2968.英文原文License Plate Recognition Based On Prior KnowledgeQian Gao, Xinnian Wang and Gongfu XieAbstract - In this paper, a new algorithm based on improved BP (back propagation) neural network for Chinese vehicle license plate recognition (LPR) is described. The proposed approach provides a solution for the vehicle license plates (VLP) which were degraded severely. What it remarkably differs from the traditional methods is the application of prior knowledge of license plate to the procedure of location, segmentation and recognition. Color collocation is used to locate the license plate in the image. Dimensions of each character are constant, which is used to segment the character of VLPs. The Layout of the Chinese VLP is an important feature, which is used to construct a classifier for recognizing. The experimental results show that the improved algorithm is effective under the condition that the license plates were degraded severely.Index Terms - License plate recognition, prior knowledge, vehiclelicense plates, neural network.I. INTRODUCTIONV ehicle License-Plate (VLP) recognition is a very interesting but difficult problem. It is important in a number of applications such as weight-and-speed-limit, red traffic infringement, road surveys and park security [1]. VLP recognition system consists of the plate location, the characters segmentation, and the characters recognition. These tasks become more sophisticated when dealing with plate images taken in various inclined angles or under various lighting, weather condition and cleanliness of the plate. Because this problem is usually used in real-time systems, it requires not only accuracy but also fast processing. Most existing VLP recognition methods [2], [3], [4], [5] reduce the complexity and increase the recognition rate by using some specific features of local VLPs and establishing some constrains on the position, distance from the camera to vehicles, and the inclined angles. In addition, neural network was used to increase the recognition rate [6], [7] but the traditional recognition methods seldom consider the prior knowledge of the local VLPs. In this paper, we proposed a new improved learning method of BP algorithm based on specific features of Chinese VLPs. The proposed algorithm overcomes the low speed convergence of BP neural network [8] and remarkable increases the recognition rate especially under the condition that the license plate images were degrade severely.II. SPECIFIC FEA TURES OF CHINESE VLPSA. DimensionsAccording to the guideline for vehicle inspection [9], all license plates must be rectangular and have the dimensions and have all 7 characters written in a single line. Under practical environments, the distance from the camera to vehicles and the inclined angles are constant, so all characters of the license plate have a fixed width, and the distance between the medium axes of two adjoining characters is fixed and the ratio between width and height is nearly constant. Those features can be used to locate the plate and segment the individual character. B. Color collocation of the plateThere are four kinds of color collocation for the Chinese vehicle license plate .These color collocations are shown in table I.TABLE IMoreover, military vehicle and police wagon plates contain a red character which belongs to a specific character set. This feature can be used to improve the recognition rate.C. Layout of the Chinese VLPSThe criterion of the vehicle license plate defines the characters layout of Chinese license plate. All standard license plates contain Chinese characters, numbers and letters which are shown in Fig.1. The first one is a Chinese character which is an abbreviation of Chineseprovinces. The second one is a letter ranging from A to Z except the letter I. The third and fourth ones are letters or numbers. The fifth to seventh ones are numbers ranging from 0 to 9 only. However the first or the seventh ones may be red characters in special plates (as shown in Fig.1). After segmentation process the individual character is extracted. Taking advantage of the layout and color collocation prior knowledge, the individual character will enter one of the classes: abbreviations of Chinese provinces set, letters set, letters or numbers set, number set, special characters set.(a)Typical layout(b) Special characterFig.1 The layout of the Chinese license plateIII. THE PROPOSED ALGORITHMThis algorithm consists of four modules: VLP location, character segmentation, character classification and character recognition. The main steps of the flowchart of LPR system are shown in Fig. 2.Firstly the license plate is located in an input image and characters are segmented. Then every individual character image enters the classifier to decide which class it belongs to, and finally the BP network decides which character the character image represents.A. Preprocessing the license plate1) VLP LocationThis process sufficiently utilizes the color feature such as color collocation, color centers and distribution in the plate region, which are described in section II. These color features can be used to eliminate the disturbance o f the fake plate ’ s regions. The flowchart of the plate location is shown in Fig. 3.Fig.3 The flowchart of the plate location algorithmThe regions which structure and texture similar to the vehicle plate are extracted. The process is described as followed:Here, the Gaussian variance is set to be less than W/3 (W is the character stroke width), so 1P gets its maximum value M at the center of the stroke. After convolution, binarization is performed according to a threshold which equals T * M (T<0.5). Median filter is used to preserve the edge gradient and eliminate isolated noise of the binary image. An N * N rectangle median filter is set, and N represents the odd integer mostly close to W.Morphology closing operation can be used to extract the candidate region. The confidence degree of candidate region for being a license plate is verified according to the aspect ratio and areas. Here, the aspect ratio is set between 1.5 and 4 for the reason of inclination. The prior knowledge of color collocation is used to locate plate region exactly. The locating process of the license plate is shown in Fig. 4.2) Character segmentationThis part presents an algorithm for character segmentation based on prior knowledge, using character width, fixed number of characters, the ratio of height to width of a character, and so on. The flowchart of the character segmentation is shown in Fig. 5.Firstly, preprocess the license the plate image, such as uneven illumination correction, contrast enhancement, incline correction and edge enhancement operations; secondly, eliminating space mark which appears between the second character and the third character; thirdly, merging the segmented fragments of the characters. In China, all standard license plates contain only 7 characters (see Fig. 1). If the number of segmented characters is larger than seven, the merging process must be performed. Table II shows the merging process. Finally, extracting the individual character’ image based on the number and the width of the character. Fig. 6 shows the segmentation results. (a) The incline and broken plate image, (b) the incline and distort plate image, (c)the serious fade plate image, (d) the smut license plate image.where Nf is the number of character segments, MaxF is the number of the license plate, and i is the index of each character segment.The medium point of each segmented character is determined by:(3)where 1i Sis the initial coordinates for the character segment, and 2i S is thefinal coordinate for the character segment. The d istance between two consecutive medium points is calculated by:(4)Fig.6 The segmentation resultsB. Using specific prior knowledge for recognitionThe layout of the Chinese VLP is an important feature (as described in the section II), which can be used to construct a classifier for recognizing. The recognizing procedure adopted conjugate gradient descent fast learning method, which is an improved learning method of BP neural network[10]. Conjugate gradient descent, which employs a series of line searches in weight or parameter space. One picks the first descent direction and moves along that direction until the minimum in error is reached. The second descent direction is then computed: this direction the “ conjugate direction” is the one along which the gr adient does not change its direction will not “ spoil ” the contribution from the previous descent iterations. This algorithm adopted topology 625-35-N as shown in Fig. 7. The size of input value is 625 (25*25 ) and initial weights are with random values, desired output values have the same feature with the input values.As Fig. 7 shows, there is a three-layer network which contains working signal feed forward operation and reverse propagation of error processes. The target parameter is t and the length of network outputvectors is n. Sigmoid is the nonlinear transfer function, weights are initialized with random values, and changed in a direction that will reduce the errors.The algorithm was trained with 1000 images of different background and illumination most of which were degrade severely. After preprocessing process, the individual characters are stored. All characters used for training and testing have the same size (25*25 ).The integrated process for license plate recognition consists of the following steps:1) Feature extractingThe feature vectors from separated character images have direct effects on the recognition rate. Many methods can be used to extract feature of the image samples, e.g. statistics of data at vertical direction, edge and shape, framework and all pixels values. Based on extensive experiments, all pixels values method is used to construct feature vectors. Each character was reshaped into a column of 625 rows’ feature vector. These feature vectors are divided into two categories which can be used for training process and testing process.2) Training modelThe layout of the Chinese VLP is an important feature, which can be used to construct a classifier for training, so five categories are divided. The training process of numbers is shown in Fig. 8.As Fig. 8 shows, firstly the classifier decides the class of the inputfeature vector, and then the feature vector enters the neural network correspondingly. After the training process the optimum parameters of the net are stored for recognition. The training and testing process is summarized in Fig. 9.(a) Training process(b)Testing processFig.9 The recognition process3) Recognizing modelAfter training process there are five nets which were completely trained and the optimum parameters were stored. The untrained feature vectors are used to test the net, the performance of the recognition system is shown in Table III. The license plate recognition system is characterized by the recognition rate which is defined by equation (5).Recognition rate =(number of correctly read characters)/ (number of found characters) (5)IV. COMPARISON OF THE RECOGNITION RA TE WITH OTHER METHODSIn order to evaluate the proposed algorithm, two groups of experiments were conducted. One group is to compare the proposed method with the BP based recognition method [11]. The result is shown in table IV. The other group is to compare the proposed method with themethod based on SVM [12].The result is shown in table V. The same training and test data set are used. The comparison results show that the proposed method performs better than the BP neural network and SVM counterpart.V. CONCLUSIONIn this paper, we adopt a new improved learning method of BP algorithm based on specific features of Chinese VLPs. Color collocation and dimension are used in the preprocessing procedure, which makes location and segmentation more accurate. The Layout of the Chinese VLP is an important feature, which is used to construct a classifier for recognizing and makes the system performs well on scratch and inclined plate images. Experimental results show that the proposed method reduces the error rate and consumes less time. However, it still has a few errors when dealing with specially bad quality plates and characters similar to others. This often takes place among these characters (especially letter and number): 3—8 4—A 8—B D—0.In order to improve the incorrect recognizing problem we try to add template-based model [13] at the end of the neural network.中文译文基于先验知识的车牌识别Qian Gao, Xinnian Wang and Gongfu Xie摘要- 本文介绍了一种基于改进的BP(反向传播)神经网络的中国车牌识别(LPR)算法。
智能交通系统中英文对照外文翻译文献(文档含英文原文和中文翻译)原文:Traffic Assignment Forecast Model Research in ITS IntroductionThe intelligent transportation system (ITS) develops rapidly along with the city sustainable development, the digital city construction and the development of transportation. One of the main functions of the ITS is to improve transportation environment and alleviate the transportation jam, the most effective method to gain the aim is to forecast the traffic volume of the local network and the important nodes exactly with GIS function of path analysis and correlation mathematic methods, and this will lead a better planning of the traffic network. Traffic assignment forecast is an important phase of traffic volume forecast. It will assign the forecasted traffic to every way in the traffic sector. If the traffic volume of certain road is too big, which would bring on traffic jam, planners must consider the adoption of new roads or improving existing roads to alleviate the traffic congestion situation. This study attempts to present an improved traffic assignment forecast model, MPCC, based on analyzing the advantages and disadvantages of classic traffic assignment forecast models, and test the validity of the improved model in practice.1 Analysis of classic models1.1 Shortcut traffic assignmentShortcut traffic assignment is a static traffic assignment method. In this method, the traffic load impact in the vehicles’ travel is not considered, and the traffic impedance (travel time) is a constant. The traffic volume of every origination-destination couple will be assigned to the shortcut between the origination and destination, while the traffic volume of other roads in this sector is null. This assignment method has the advantage of simple calculation; however, uneven distribution of the traffic volume is its obvious shortcoming. Using this assignment method, the assignment traffic volume will be concentrated on the shortcut, which isobviously not realistic. However, shortcut traffic assignment is the basis of all theother traffic assignment methods.1.2 Multi-ways probability assignmentIn reality, travelers always want to choose the shortcut to the destination, whichis called the shortcut factor; however, as the complexity of the traffic network, thepath chosen may not necessarily be the shortcut, which is called the random factor.Although every traveler hopes to follow the shortcut, there are some whose choice isnot the shortcut in fact. The shorter the path is, the greater the probability of beingchosen is; the longer the path is, the smaller the probability of being chosen is.Therefore, the multi-ways probability assignment model is guided by the LOGIT model:∑---=n j ii i F F p 1)exp()exp(θθ (1)Where i p is the probability of the path section i; i F is the travel time of thepath section i; θ is the transport decision parameter, which is calculated by the followprinciple: firstly, calculate the i p with different θ (from 0 to 1), then find the θwhich makes i p the most proximate to the actual i p .The shortcut factor and the random factor is considered in multi-ways probabilityassignment, therefore, the assignment result is more reasonable, but the relationshipbetween traffic impedance and traffic load and road capacity is not considered in thismethod, which leads to the assignment result is imprecise in more crowded trafficnetwork. We attempt to improve the accuracy through integrating the several elements above in one model-MPCC.2 Multi-ways probability and capacity constraint model2.1 Rational path aggregateIn order to make the improved model more reasonable in the application, theconcept of rational path aggregate has been proposed. The rational path aggregate,which is the foundation of MPCC model, constrains the calculation scope. Rationalpath aggregate refers to the aggregate of paths between starts and ends of the trafficsector, defined by inner nodes ascertained by the following rules: the distancebetween the next inner node and the start can not be shorter than the distance betweenthe current one and the start; at the same time, the distance between the next innernode and the end can not be longer than the distance between the current one and theend. The multi-ways probability assignment model will be only used in the rationalpath aggregate to assign the forecast traffic volume, and this will greatly enhance theapplicability of this model.2.2 Model assumption1) Traffic impedance is not a constant. It is decided by the vehicle characteristicand the current traffic situation.2) The traffic impedance which travelers estimate is random and imprecise.3) Every traveler chooses the path from respective rational path aggregate.Based on the assumptions above, we can use the MPCC model to assign thetraffic volume in the sector of origination-destination couples.2.3 Calculation of path traffic impedanceActually, travelers have different understanding to path traffic impedance, butgenerally, the travel cost, which is mainly made up of forecast travel time, travellength and forecast travel outlay, is considered the traffic impedance. Eq. (2) displaysthis relationship. a a a a F L T C γβα++= (2)Where a C is the traffic impedance of the path section a; a T is the forecast traveltime of the path section a; a L is the travel length of the path section a; a F is theforecast travel outlay of the path section a; α, β, γ are the weight value of that threeelements which impact the traffic impedance. For a certain path section, there aredifferent α, β and γ value for different vehicles. We can get the weighted average of α,β and γ of each path section from the statistic percent of each type of vehicle in thepath section.2.4 Chosen probability in MPCCActually, travelers always want to follow the best path (broad sense shortcut), butbecause of the impact of random factor, travelers just can choose the path which is ofthe smallest traffic impedance they estimate by themselves. It is the key point ofMPCC. According to the random utility theory of economics, if traffic impedance is considered as the negativeutility, the chosen probability rs p of origination-destinationpoints couple (r, s) should follow LOGIT model:∑---=n j jrs rs bC bC p 1)exp()exp( (3) where rs p is the chosen probability of the pathsection (r, s);rs C is the traffic impedance of the path sect-ion (r, s); j C is the trafficimpedance of each path section in the forecast traffic sector; b reflects the travelers’cognition to the traffic impedance of paths in the traffic sector, which has reverseratio to its deviation. If b → ∞ , the deviation of understanding extent of trafficimpedance approaches to 0. In this case, all the travelers will follow the path whichis of the smallest traffic impedance, which equals to the assignment results withShortcut Traffic Assignment. Contrarily, if b → 0, travelers ’ understanding error approaches infinity. In this case, the paths travelers choose are scattered. There is anobjection that b is of dimension in Eq.(3). Because the deviation of b should beknown before, it is difficult to determine the value of b. Therefore, Eq.(3) is improvedas follows:∑---=n j OD j OD rsrs C bC C bC p 1)exp()exp(,∑-=n j j OD C n C 11(4) Where OD C is the average of the traffic impedance of all the as-signed paths; bwhich is of no dimension, just has relationship to the rational path aggregate, ratherthan the traffic impedance. According to actual observation, the range of b which is anexperience value is generally between 3.00 to 4.00. For the more crowded cityinternal roads, b is normally between 3.00 and 3.50.2.5 Flow of MPCCMPCC model combines the idea of multi-ways probability assignment anditerative capacity constraint traffic assignment.Firstly, we can get the geometric information of the road network and OD trafficvolume from related data. Then we determine the rational path aggregate with themethod which is explained in Section 2.1.Secondly, we can calculate the traffic impedance of each path section with Eq.(2),Fig.1 Flowchart of MPCC which is expatiated in Section 2.3.Thirdly, on the foundation of the traffic impedance of each path section, we cancalculate the respective forecast traffic volume of every path section with improvedLOGIT model (Eq.(4)) in Section 2.4, which is the key point of MPCC.Fourthly, through the calculation processabove, we can get the chosen probability andforecast traffic volume of each path section, but itis not the end. We must recalculate the trafficimpedance again in the new traffic volumesituation. As is shown in Fig.1, because of theconsideration of the relationship between trafficimpedance and traffic load, the traffic impedanceand forecast assignment traffic volume of everypath will be continually amended. Using therelationship model between average speed andtraffic volume, we can calculate the travel timeand the traffic impedance of certain path sect-ionunder different traffic volume situation. For theroads with different technical levels, therelationship models between average speeds totraffic volume are as follows: 1) Highway: 1082.049.179AN V = (5) 2) Level 1 Roads: 11433.084.155AN V = (6) 3) Level 2 Roads: 66.091.057.112AN V = (7) 4) Level 3 Roads: 3.132.01.99AN V = (8) 5) Level 4 Roads: 0988.05.70A N V =(9) Where V is the average speed of the path section; A N is the traffic volume of thepath section.At the end, we can repeat assigning traffic volume of path sections with themethod in previous step, which is the idea of iterative capacity constraint assignment,until the traffic volume of every path section is stable.译文智能交通交通量分配预测模型介绍随着城市的可持续化发展、数字化城市的建设以及交通运输业的发展,智能交通系统(ITS)的发展越来越快。
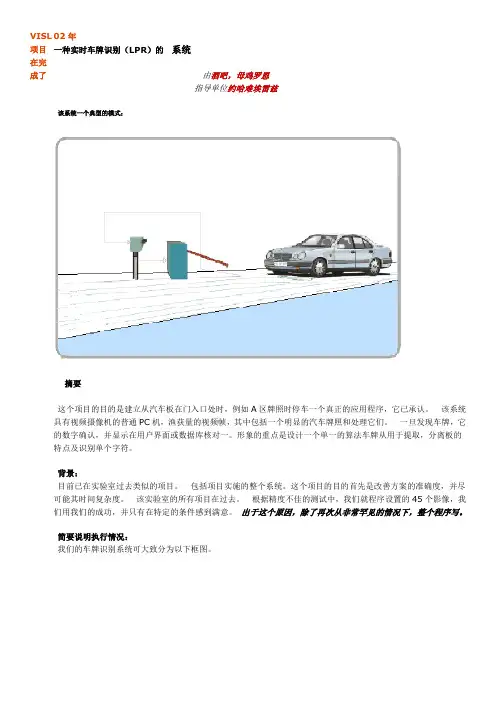
VISL 项目在完成了02年一种实时车牌识别(LPR)的系统由酒吧,母鸡罗恩指导单位约哈难埃雷兹该系统一个典型的模式:摘要这个项目的目的是建立从汽车板在门入口处时,例如A区牌照时停车一个真正的应用程序,它已承认。
该系统具有视频摄像机的普通PC机,渔获量的视频帧,其中包括一个明显的汽车牌照和处理它们。
一旦发现车牌,它的数字确认,并显示在用户界面或数据库核对一。
形象的重点是设计一个单一的算法车牌从用于提取,分离板的特点及识别单个字符。
背景:目前已在实验室过去类似的项目。
包括项目实施的整个系统。
这个项目的目的首先是改善方案的准确度,并尽可能其时间复杂度。
该实验室的所有项目在过去。
根据精度不佳的测试中,我们就程序设置的45个影像,我们用我们的成功,并只有在特定的条件感到满意。
出于这个原因,除了再次从非常罕见的情况下,整个程序写。
简要说明执行情况:我们的车牌识别系统可大致分为以下框图。
框图全球系统。
另外这个进程可以被看作是减少或地方的牌照抑制有害信息从携带信息的信号,这里是一个视频序列包含大量无关信息的特点,形式抽象符号的研究。
光学字符识别(OCR)已采用神经网络技术,采用神经元在输出层的前馈网络的3层,200个神经元在20输入层,中间神经元在10层,。
我们保留了神经网络数据集图像用在项目的先例,其中包括238位第我们的算法的详细步骤说明如下图:框图程序的子系统。
这里介绍捕获帧的一个给定的产出上面所述的主要步骤:示例捕获帧黄色区域捕获的帧过滤捕获帧地区扩张黄色车牌区域确定氡角度的变换板的使用改进的LP地区调整唱片轮廓-列和图调整唱片轮廓-线条和图唱片作物灰度唱片唱片二值化,均衡使用自适应阈值二进制唱片归唱片确定使用的LP水平轮廓图像总和先决行归唱片轮廓调节字符分割使用的山峰到山谷方法扩张型数位影像调整数字图像水平轮廓-线和图调整的数字图像轮廓调整大小的数字图像OCR的数字识别的神经网络方法工具该方案实施开发了基于Matlab。
车牌照识别系统设计与实现Design and Implementation of Car License Plate Recognition System毕业论文(设计)原创性声明本人所呈交的毕业论文(设计)是我在导师的指导下进行的研究工作及取得的研究成果。
据我所知,除文中已经注明引用的内容外,本论文(设计)不包含其他个人已经发表或撰写过的研究成果。
对本论文(设计)的研究做出重要贡献的个人和集体,均已在文中作了明确说明并表示谢意。
作者签名:日期:毕业论文(设计)授权使用说明本论文(设计)作者完全了解**学院有关保留、使用毕业论文(设计)的规定,学校有权保留论文(设计)并向相关部门送交论文(设计)的电子版和纸质版。
有权将论文(设计)用于非赢利目的的少量复制并允许论文(设计)进入学校图书馆被查阅。
学校可以公布论文(设计)的全部或部分内容。
保密的论文(设计)在解密后适用本规定。
作者签名:指导教师签名:日期:日期:注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
3.附件包括:任务书、开题报告、外文译文、译文原文(复印件)。
4.文字、图表要求:1)文字通顺,语言流畅,书写字迹工整,打印字体及大小符合要求,无错别字,不准请他人代写2)工程设计类题目的图纸,要求部分用尺规绘制,部分用计算机绘制,所有图纸应符合国家技术标准规范。
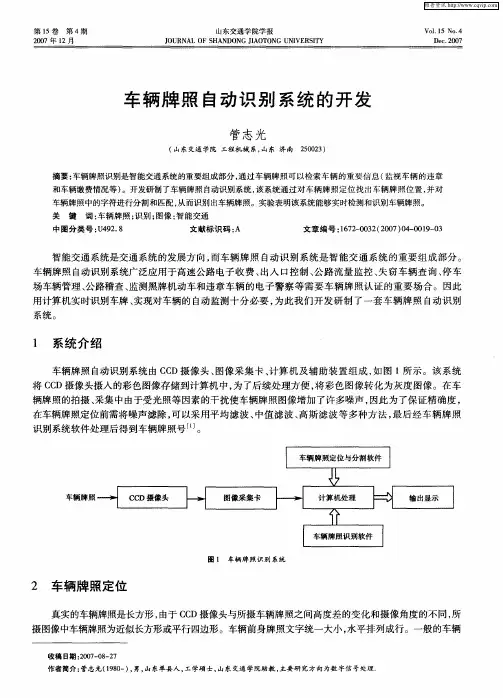
图表整洁,布局合理,文字注释必须使用工程字书写,不准用徒手画3)毕业论文须用A4单面打印,论文50页以上的双面打印4)图表应绘制于无格子的页面上5)软件工程类课题应有程序清单,并提供电子文档5.装订顺序1)设计(论文)2)附件:按照任务书、开题报告、外文译文、译文原文(复印件)次序装订3)其它摘要汽车牌照自动识别系统是智能交通系统的重要组成部分,是高科技的公路交通监控管理系统的主要功能模块之一,汽车牌照识别技术的研究有重要的现实应用意义。
汽车牌照自动识别系统中英文对照外文翻译文献(文档含英文原文和中文翻译)Automatic vehicle license plate recognition systemImage processing is not a one step process.We are able to distinguish between several steps which must be performed one after the other until we can extract the data of interest from the observed scene.In this way a hierarchical processing scheme is built up as sketched in Fig.The figure gives an overview of the different phases of image processing.Image processing begins with the capture of an image with a suitable,not necessarily optical,acquisition system.In a technical or scientific application,we may choose to select an appropriate imaging system.Furthermore,we can set up the illumination system,choose the best wavelength range,and select other options to capture the object feature of interest in the best way in an image.Once the image is sensed,it must be brought into a form that can be treated with digital computers.This process is called digitization.With the problems of traffic are more and more serious. Thus Intelligent Transport System (ITS) comes out. The subject of the automatic recognition of license plate is one of the most significant subjects that are improved from the connection of computer vision and pattern recognition. The image imputed to the computer is disposed and analyzed in order to localization the position and recognition the characters on the license plate express these characters in text string form The license plate recognition system (LPSR) has important application in ITS. In LPSR, the first step is for locating the license plate in the captured image which is very important for character recognition. The recognition correction rate of license plate is governed by accurate degree of license plate location. In this paper, several of methods in image manipulation are compared and analyzed, then come out the resolutions for localization of the car plate. The experiences show that the good result has been got with thesemethods. The methods based on edge map and frequency analysis is used in the process of the localization of the license plate, that is to say, extracting the characteristics of the license plate in the car images after being checked up for the edge, and then analyzing and processing until the probably area of license plate is extracted.The automated license plate location is a part of the image processing ,it’s also an important part in the intelligent traffic system.It is the key step in the Vehicle License Plate Recognition(LPR).A method for the recognition of images of different backgrounds and different illuminations is proposed in the paper.the upper and lower borders are determined through the gray variation regulation of the character distribution.The left and right borders are determined through the black-white variation of the pixels in every row.The first steps of digital processing may include a number of different operations and are known as image processing.If the sensor has nonlinear characteristics, these need to be corrected.Likewise,brightness and contrast of the image may require improvement.Commonly,too,coordinate transformations are needed to restore geometrical distortions introduced during image formation.Radiometric and geometric corrections are elementary pixel processing operations.It may be necessary to correct known disturbances in the image,for instance caused by a defocused optics,motion blur,errors in the sensor,or errors in the transmission of image signals.We also deal with reconstruction techniques which are required with many indirect imaging techniques such as tomography that deliver no direct image.A whole chain of processing steps is necessary to analyze and identify objects.First,adequate filtering procedures must be applied in order to distinguish the objects of interest from other objects and the background.Essentially,from an image(or several images),one or more feature images are extracted.The basic tools for this task are averaging and edgedetection and the analysis of simple neighborhoods and complex patterns known as texture in image processing.An important feature of an object is also its motion.Techniques to detect and determine motion are necessary.Then the object has to be separated from the background.This means that regions of constant features and discontinuities must be identified.This process leads to a label image.Now that we know the exact geometrical shape of the object,we can extract further information such as the mean gray value,the area,perimeter,and other parameters for the form of the object[3].These parameters can be used to classify objects.This is an important step in many applications of image processing,as the following examples show:In a satellite image showing an agricultural area,we would like to distinguish fields with different fruits and obtain parameters to estimate their ripeness or to detect damage by parasites.There are many medical applications where the essential problem is to detect pathologi-al changes.A classic example is the analysis of aberrations in chromosomes.Character recognition in printed and handwritten text is another example which has been studied since image processing began and still poses significant difficulties.You hopefully do more,namely try to understand the meaning of what you are reading.This is also the final step of image processing,where one aims to understand the observed scene.We perform this task more or less unconsciously whenever we use our visual system.We recognize people,we can easily distinguish between the image of a scientific lab and that of a living room,and we watch the traffic to cross a street safely.We all do this without knowing how the visual system works.For some times now,image processing and computer-graphics have been treated as two different areas.Knowledge in both areas has increased considerably and more complex problems can now be treated.Computer graphics is striving to achieve photorealistic computer-generated images of three-dimensional scenes,while image processing is trying to reconstruct one from an image actually taken with a camera.In thissense,image processing performs the inverse procedure to that of computer graphics.We start with knowledge of the shape and features of an object—at the bottom of Fig. and work upwards until we get a two-dimensional image.To handle image processing or computer graphics,we basically have to work from the same knowledge.We need to know the interaction between illumination and objects,how a three-dimensional scene is projected onto an image plane,etc.There are still quite a few differences between an image processing and a graphics workstation.But we can envisage that,when the similarities and interrelations between computergraphics and image processing are better understood and the proper hardware is developed,we will see some kind of general-purpose workstation in the future which can handle computer graphics as well as image processing tasks[5].The advent of multimedia,i. e. ,the integration of text,images,sound,and movies,will further accelerate the unification of computer graphics and image processing.In January 1980 Scientific American published a remarkable image called Plume2,the second of eight volcanic eruptions detected on the Jovian moon by the spacecraft Voyager 1 on 5 March 1979.The picture was a landmark image in interplanetary exploration—the first time an erupting volcano had been seen in space.It was also a triumph for image processing.Satellite imagery and images from interplanetary explorers have until fairly recently been the major users of image processing techniques,where a computer image is numerically manipulated to produce some desired effect-such as making a particular aspect or feature in the image more visible.Image processing has its roots in photo reconnaissance in the Second World War where processing operations were optical and interpretation operations were performed by humans who undertook such tasks as quantifying the effect of bombing raids.With the advent of satellite imagery in the late 1960s,much computer-based work began and the color composite satellite images,sometimesstartlingly beautiful, have become part of our visual culture and the perception of our planet.Like computer graphics,it was until recently confined to research laboratories which could afford the expensive image processing computers that could cope with the substantial processing overheads required to process large numbers of high-resolution images.With the advent of cheap powerful computers and image collection devices like digital cameras and scanners,we have seen a migration of image processing techniques into the public domain.Classical image processing techniques are routinely employed by graphic designers to manipulate photographic and generated imagery,either to correct defects,change color and so on or creatively to transform the entire look of an image by subjecting it to some operation such as edge enhancement.A recent mainstream application of image processing is the compression of images—either for transmission across the Internet or the compression of moving video images in video telephony and video conferencing.Video telephony is one of the current crossover areas that employ both computer graphics and classical image processing techniques to try to achieve very high compression rates.All this is part of an inexorable trend towards the digital representation of images.Indeed that most powerful image form of the twentieth century—the TV image—is also about to be taken into the digital domain.Image processing is characterized by a large number of algorithms that are specific solutions to specific problems.Some are mathematical or context-independent operations that are applied to each and every pixel.For example,we can use Fourier transforms to perform image filtering operations.Others are“algorithmic”—we may use a complicated recursive strategy to find those pixels that constitute the edges in an image.Image processing operations often form part of a computer vision system.The input image may be filtered to highlight or reveal edges prior to ashape detection usually known as low-level operations.In computer graphics filtering operations are used extensively to avoid abasing or sampling artifacts.翻译:汽车牌照自动识别系统图像处理不是一步就能完成的过程。
中文2470字智能停车辅助系统的系统配置智能停车场管理系统采用先进技术和高度自动化的机电设备,将机械、电子计算机和自控设备以及智能IC卡技术有机地结合起来,通过电脑管理可实现车辆出入管理、自动存储数据等功能,实现脱机运行并提供—种高效管理服务的系统。
新型的智能停车场将生活理念和建筑艺术、信息技术、计算机电子技术等现代高科技完美结合,提供的是一种操作简单、使用方便、功能先进的人性化系统。
它依靠高科技,以人为本,采用图形人机界面操作方式提供一种更加安全、舒适、方便、快捷和开放的智能化、信息化生活空间 促进了人文环境的健康发展。
本文介绍了目前开发的投资促进机构配置(智能停车辅助系统)。
IPAS允许司机指定目标位置的三个免费方法:基于单眼视觉的停车位置标记识别,基于超声波传感器的停车位识别,和拖放GUI(图形用户界面)。
IPAS生成最优路径马赫指定的目标位置。
在停车场的运作,并估计自我车辆姿势使用ESP(电子稳定程序)的传感器,如车轮需要银行脚踏开关和传感器,转向角传感器。
IPAS自动控制制动和转向通过发送所需的促动ESP和轨迹通过可以EPS(电动助力转向)。
IPAS通知当前驱动器通过对停车操作后视图的图像轨迹估计,这是通过实验验证了系统的车辆。
关键词智能停车辅助系统 驾驶员辅助系统介绍系统主要由六部分组成:自我车辆姿态估计、路径生成器、路径跟踪器、主动制动系统、主动转向系统和HMI(人机界面)。
IPAS既可进行半自动的停车辅助系统,其中的转向操作自动化。
而且自动泊车辅助系统,其中转向和制动操作自动化。
指定目标位置定位的自动/半自动停车操作的目标位置。
我们开发了三个互补的方法:基于单目视觉的停车插槽标记识别,基于超声传感器的平行泊车插槽识别,和拖放的GUI图形用户界面。
自我车辆姿态估计实现通过利用各种传感器,包括轮速传感器的车辆姿态估计的阿克曼模型,转向角度传感器,制动踏板开关和车轮角度传感器。
这些传感器连接到ESP或ESC和EPS和报告他们的测量通过能。
汽车车牌识别系统---车牌定位子系统的设计与实现摘要汽车车牌识别系统是近几年发展起来的计算机视觉和模式识别技术在智能交通领域应用的重要研究课题之一。
在车牌自动识别系统中,首先要将车牌从所获取的图像中分割出来实现车牌定位,这是进行车牌字符识别的重要步骤,定位的准确与否直接影响车牌识别率。
本次毕业设计首先对车牌识别系统的现状和已有的技术进行了深入的研究,在此基础上设计并开发了一个基于MATLAB的车牌定位系统,通过编写MATLAB文件,对各种车辆图像处理方法进行分析、比较,最终确定了车牌预处理、车牌粗定位和精定位的方法。
本次设计采取的是基于微分的边缘检测,先从经过边缘提取后的车辆图像中提取车牌特征,进行分析处理,从而初步定出车牌的区域,再利用车牌的先验知识和分布特征对车牌区域二值化图像进行处理,从而得到车牌的精确区域,并且取得了较好的定位结果。
关键词:图像采集,图像预处理,边缘检测,二值化,车牌定位ENGLISH SUBJECTABSTRACTThe subject of the automatic recognition of license plate is one of the most significant subjects that are improved from the connection of computer vision and pattern recognition. In LPSR, the first step is for locating the license plate in the captured image which is very important for character recognition. The recognition correction rate of license plate is governed by accurate degree of license plate location.Firstly, the paper gives a deep research on the status and technique of the plate license recognition system. On the basis of research, a solution of plate license recognition system is proposed through the software MATLAB,by the M-files several of methods in image manipulation are compared and analyzed. The methods based on edge map and das differential analysis is used in the process of the localization of the license plate,extracting the characteristics of the license plate in the car images after being checked up for the edge, and then analyzing and processing until the probably area of license plate is extracted,then come out the resolutions for localization of the car plate.KEY WORDS:imageacquisition,image preprocessing,edge detection,binarization,licence,license plate location目录前言 (1)第1章绪论 (2)§1.1 课题研究的背景 (2)§1.2 车牌的特征 (2)§1.3 国内外车辆牌照识别技术现状 (3)§1.4车牌识别技术的应用情况 (4)§1.5 车牌识别技术的发展趋势 (5)§1.6车牌定位的意义 (6)第2章MATLAB简介 (7)§2.1 MATLAB发展历史 (7)§2.2 MATLAB的语言特点 (7)第3章图像预处理 (10)§3.1 灰度变换 (10)§3.2 图像增强 (11)§3. 3 图像边缘提取及二值化 (13)§3. 4 形态学滤波 (18)第4章车牌定位 (21)§4.1 车牌定位的主要方法 (21)§4.1.1基于直线检测的方法 (22)§4.1.2 基于阈值化的方法 (22)§4.1.3 基于灰度边缘检测方法 (22)§4.1.4 基于彩色图像的车牌定位方法 (25)§4.2 车牌提取 (26)结论 (30)参考文献 (31)致谢 (33)前言随着交通问题的日益严重,智能交通系统应运而生。
建立一个自动车辆车牌识别系统车辆由于数量庞大的抽象,现代化的城市要建立有效的交通自动系统管理和调度.最有用的系统之一是车辆车牌识别系统,它能自动捕获车辆图像和阅读这些板块的号码在本文中,我们提出一个自动心室晚电位识别系统,ISeeCarRecognizer,阅读越南样颗粒在交通费的注册号码.我们的系统包括三个主要模块:心室晚电位检测,板数分割和车牌号码识别。
在心室晚电位检测模块,我们提出一个有效的边界线为基础Hough变换相结合的方法和轮廓算法.该方法优化速度和准确性处理图像取自不同职位。
然后,我们使用水平和垂直投影的车牌号码分开心室晚电位分段模块.最后,每个车牌号码将被OCR的识别模块实现了由隐马尔可夫模型。
该系统在两个形象评价实证套并证明其有效性是适用于实际交通收费系统。
该系统也可适用于轻微改变一些其他类型的病毒样颗粒。
一.导言车牌识别的问题是一个非常有趣,且困难的一个问题.这在许多交通管理系统中是非常有用的。
心室晚电位识别需要一些复杂的任务,如车牌的检测,分割和识别。
这些任务变得更加复杂时,处理各种倾斜角度拍摄的图像或含有噪音的图像。
由于此问题通常是在实时系统中使用,它不仅需要准确性,而且要效率.大多数心室晚电位识别应用通过建立减少一些复杂的约束的位置和距离相机车辆,倾斜角度。
通过这种方式,车牌识别系统的识别率已得到明显改善.在此外,我们可以更准确地获得通过一些具体的当地样颗粒的功能,如字符数,行数在一板,或板的背景颜色或的宽度比为一板高。
二.相关工作心室晚电位的自动识别问题在20世纪90年代开始就有研究。
第一种方法是基于特征的边界线。
首次输入图像处理,以丰富的边界线的一些信息如梯度算法过滤器,导致在一边缘图像.这张照片是二值化处理,然后用某些算法,如Hough 变换,检测线。
最终,2平行线视为板候选人[4] [5]。
另一种方法是基于形态学[2]。
这种方法侧重于一些板块图像性质如亮度,对称,角度等。
The Method Research of Vehicle Image Preprocessing and LicensePlate LocationAbstract—Aiming at the characteristics of vehicle images, this paper presents a method about vehicle image preprocessing and license plate location. The image preprocessing mainly includes graying the image, detecting the edge on image, median filtering and taking binaryzationon image. The license plate location consists of locating upper and lower boundary, locating left and right boundary for the image after preprocessing and finally the license plate region located. All the above is the foundation for the subsequent license plate recognition. A large number of experiments have proved that this method has the good image preprocessing effect, high accuracy rate, location speed and the good practical value.Keywords-Preprocessing; Median filtering; Binaryzation; Edge detection; License plate locationI. I NTRODUCTIONVehicle license plate recognition system based on vehicle license for the specific target is dedicated computer vision system[1]. It is one of the important research topics about computer vision and pattern recognition technology in the field of intelligent transportation applications. Vehicle license identification is the general composed by the following process: image acquisition, image preprocessing, license plate location, character segmentation, character recognition[2]. The correct rate of the last process has a direct impact on the next process. Since the original image from the acquisition card includes the vehicle license plate, the car itself, and automotive background image, it is necessary to remove these non-licensed images in order to extract the correct regional license and for the foundation of the license plate character recognition . In the actual system, due to natural changes in day and night illumination, vehicle own movement, the camera angle of observation, collecting images of the equipment itself and other factors influence, the image obtained is not always very satisfactory, there is a wide range of noise. Therefore, it is necessary to make the license plate image pre-processing for improving image quality, layingfoundation for the subsequent license plate recognition.II. I MAGE PREPROCESSINGImage preprocessing is an essential process in license plate recognition system, and the quality of preprocessing directly affects the location. The image preprocessing in this article includes image grey, edge detection, median filter andbinaryzation. The following gives the detail statement on the preprocessing process.A. Image greyingAll vehicle images acquired through camera and image card are color image, and image format is not same. The commonly used image forms are JPEG and BMP. If treatment with acquired image directly, not only the image format is complex, moreover the computation data quantity is extremely huge, such license plate location cannot satisfy the request for fast and real-time. Therefore, the color image need to be formatted processing, transforming the JPEG image or the BMP image to DIB (Device Independent Bitmap) which favors the computer to process. Then, using R, G and B tricolor weighted average method process the DIB image, processing function is shown as equation (1):F(x, y) =0.299*R(x, y) +0.587*G(x, y) + 0.114*B(x, y) (1)R(x, y), G(x, y) and B(x, y) are R, G and B tricolor component of the input color image [3]. The color image transforms to grey image by equation (1) processing, the result is shown in Fig. 1.(a) Original image(b) Grey imageFigure 1. A contrast between original image and grey imageB. Edge detectionEdge is the most basic feature of the image, so the edge indicates step change of the grey level on its surrounding pixels. Chinese vehicles license plate region has big color contrast between license plate bottom and license plate character. The license plate is composed of 7 characters with rich edge information in turn which are the Chinese character, the letter and the Arabic numeral, and the character in license plate region and background have obvious edge in the entire picture, also have many edge. This is one of the basic characteristics that license plate region distinguishes from other region in the vehicles picture, and it is also the fundamental basis of this algorithm. Commonly used edge detection operators have Prewitt operator, Sobel operator, Canny operator, LOG operator, Roberts operator and other operator. Prewitt operator and Sobel operator are first-order differential operator, the former is the average filter, the latter is the weighted average filter ,while the image edge detected by the two methods may be better than two pixels. The Canny method uses first derivative as the foundation to judge edge points. It is one of the best traditional first-order differential operators in the detection of step edge. The shortcoming is smoothing out some details [4]. LOG operator uses Gaussian function to smooth image first, then uses Laplace transform to process image, and this method processing image edge is insufficiently clear and the speed needs to be improved. The localization using Roberts operator is quite precise, but more sensitive to noise. The experiment indicated that using the Prewitt edge detection operator can better stand out the edge characteristic of license plate, and speed is faster. Fig. 2 is several imagesafter process by different edge detection operator.(a) Prewitt operator(b) Sobel operator(c) Canny operator(d) LOG operator(e) Robert operatorFigure 2.Image contrast after process by several edge detection operator C. Median filteringMedian filtering method is a non-linear smoothing technique. It sets the grey level of each pixel to the middle value of all pixels’ grey level in a neighborhood window [5]. Median filtering method is a non-linear technique that based on a sequencing statistic theory. It can inhibit the noise effectively. The basic principle of median filtering is to replace the value of point in digital image or numerical sequences with the middle value of this point’s one neighborhood, so it can let the around pixel value close to this point’s value. Thus the isolated noise is eliminated. This method utilizes the two-dimensional sliding template of a certain structure, arranges the pixel in template according to the size of pixel value, then a rise (or drop) two-dimensional data array was produced. The output of two-dimensional median filtering result provided by equation (2):G(x, y) =med {F(x-k, y-l)} (2)F(x, y), G(x, y) is respectively for original image and the image after dealing with. W is a two-dimensional template. The result is shown in Fig. 3.Figure 3. Median filter imageD. Image binaryzationImage binaryzation processing is that setting gray value of pixels on image to 0 or 255, that is, the entire image presents tangible black and white effect [6]. We obtain the binaryzation image through selecting 256 brightness level of grey image by suitable threshold. Binaryzation image can still reflect the whole and partial characteristic of image. In digital image processing, binaryzation image holds the extremely important status. First, binaryzation reduces the amount of image data. Secondly, to highlight the outline of the interest goal, this is favor to further processing. Fig. 4 is the image after binaryzation processing.Figure 4. Image after binaryzation processingIII. LICENSE PLATE LOCATIONThe task of license plate location is to remove most unwanted background information from the whole image and find the license plate region with a small amount of redundant background. Because the license plate region contrasts to the background, the histogram of license plate image shows a bimodal shape after image preprocessing. The wave trough between two wave peaks corresponding to the gray level is selected as a threshold. Supposing the image is divided by F(x, y) and the gray level range is [Z1, Zk]. Fig. 5 shows there are two obvious wave peaks in gray levelZi and Zj, and in Zt there is a wave trough. By choosing Zt reasonably, B1 belt can contain grey level correlation to the background as far as possible, while the B2 band includes grey level correlation to the license plate as far as possible [7].Figure 5. Double peak of histogramA. Locating upper and lower boundaryOne characteristic of license plate image is the crowded characters in the internal, so the grey jump is extremely fierce. We find the possible location of license plate region by using row grey jump rule of grey image. We preserve this position and call it as the fake license plate region. Specific algorithm including following steps:Step1:Calculating the level histogram of image, and smoothing the level histogram with [1,1,1,1,1] / 5 operator.Step2:Searching the bottom edge distance of license plate from the image base, if 5 line which is predefined as 5 has satisfied the request continuously which the value is bigger than or equal to 10 pixels in histogram, and the value of current line differs above 4 pixels with the value of front the Nth line, then we believe that the bottom edge distance of license plate has founded. Current line minus 5, and locates the scan line to the summit of current peak. If the current line does not satisfy the condition, then continues to search upwardly until the top margin of image.Step3:Locating the current line to the bottom of up wave crest, if the peak bottom value is greater than the maximum value, then locating to the summit of current peak, and the summit for maximum value line; searching upwardly from the current line’s next line, if the value of search line is greater than the recorded maximum value, then setting the current line as maximum value and carrying on searching upwardly from it. Otherwise, if the current value is smaller than two-thirds of maximum value, or the current value is less than 5 pixels, or the license plate’s height is greater than 80 pixels,then we think the top margin of license plate has been founded.Step4:Check whether the license plate’s height complies with the requirement or not. If the license plate’s height is smaller than 40 pixels to continue search upwardly, otherwise the license plate region has been found, and precision positioning is from up and down location of license plate.After above 4 steps searching, the upper and lower boundary of license plate has been found. Location result is shown as in Fig. 6.Fig. 6. Locating upper and lower boundaryB. Locating left and right boundaryWe can find the left and right boundary by the rule of character change in license plate. Specific algorithm including following steps:Step1:To the vertical histogram, scanning from left to right, the points less than 4 pixels in the histogram are removed firstly.Step2:The current line is written for the nLeft, as the beginning of the peak.Step3:Adding the rows that greater than or equal to 4 pixels in the cumulative histogram up, and recording it as the width of peak: Pixel1Wide.Step4:Adding the rows that smaller than or equal to 4 pixels in the cumulative histogram up, and recording it as the width of trough: Pixel0Wide. If the width of current peak is less than 4 and the average peak height is less than one-sixth of height, and the supreme value is less than a quarter of height, then merging this peak into the trough of upper peak, and to Step 1.Step5:WaveCrestCount adds 1. WaveCrestCount is the number of peak.Step6:Repeating Step 1 until the current row number is greater than the image width. Step7:Statistic all peaks, when seven consecutive width of wave trough is smaller than the height of license plate, the wave peak of left side is regarded as the left edge distance of license plate.Step8:Counting backward continually, until meeting a width of wave trough is greater than the height of license plate. The start point of wave trough is regarded as the rightedge distance of the license plate.The result of locating left and right boundary is shown as in Fig. 7.Fig. 7. Locating left and right boundaryIV. CONCLUSIONSThis paper mainly researches the preprocessing of license plate image and license plate location. The preprocessing not only removes the noise in the image but also processes edge detection to the license plate image. After preprocessing, according to the characteristic of license plate image and the regularity of grey change,the boundary of license plate is located. The use of the methods are proposed in this article, in a variety of weather conditions and under the conditions of different backgrounds 200 license plate images are collected and implemented the automatic positioning of the plate. The method can be more rapid and effective to identify the license plate from the complex background noise. Its feature detection has good anti-interference effect, can meet the real-time system's demands and has good application prospects.车辆图像预处理和车牌定位的方法研究摘要—针对车辆图像的特征,本文提出了一种车辆图像预处理和车牌定位的方法。
实时车辆的车牌识别系统摘要本文中阐述的是一个简炼的用于车牌识别系统的算法。
基于模式匹配,该算法可以应用于对车牌实时检测数据采集,测绘或一些特定应用目的。
拟议的系统原型已经使用C++和实验结果已证明认可阿尔伯塔车牌。
1.介绍车辆的车牌识别系统已经成为在视频监控领域中一个特殊的热门领域超过10年左右。
随着先进的用于交通管理应用的视频车辆检测系统的的到来,车牌识别系统被发现可以适合用在相当多的领域内,并非只是控制访问点或收费停车场。
现在它可以被集成到视频车辆检测系统,该系统通常安装在需要的地方用于十字路口控制,交通监控等,以确定该车辆是否违反交通法规或找到被盗车辆。
一些用于识别车牌的技术到目前为止有如BAM(双向联想回忆)神经网络字符识别[1],模式匹配[2]等技术。
应用于系统的技术是基于模式匹配,该系统快速,准确足以在相应的请求时间内完成,更重要的是在于阿尔伯塔车牌识别在字母和数字方位确认上的优先发展。
由于车牌号码的字体和方位因国家/州/省份的不同而不同,该算法需要作相应的修改保持其结构完整,如果我们想请求系统识别这些地方的车牌。
本文其余部分的组织如下:第2节探讨了在识别过程中涉及的系统的结构和步骤,第3节解释了算法对于车牌号码的实时检测,第4节为实验结果,第5节总结了全文包括致谢和参考文献。
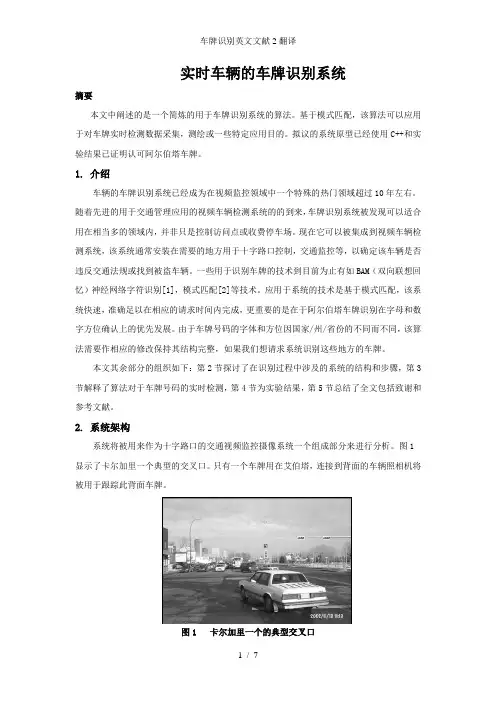
2.系统架构系统将被用来作为十字路口的交通视频监控摄像系统一个组成部分来进行分析。
图1显示了卡尔加里一个典型的交叉口。
只有一个车牌用在艾伯塔,连接到背面的车辆照相机将被用于跟踪此背面车牌。
图1 卡尔加里一个的典型交叉口系统架构包含三个相异部分:室外部分,室内部分和通信链路。
室外部分是安装摄像头在拍摄图像的不同需要的路口。
室内部分是中央控制站,从所有这些安装摄像头中,接收,存储和分析所拍摄图像。
通信链路就是高速电缆或光纤连接到所有这些相机中央控制站。
几乎所有的算法的开发程度迄今按以下类似的步骤进行。
一般的7个处理步骤已被确定为所有号牌识别算法[3] 共有。
外文资料:Based on nRF24E1 and TMC2023 automobilecollision avoidance system development andrealizationCar engineering department of institute of technology of MunichBy LORENZ FERDIDADProgress of society with the development of times, more and more cars have entered ordinary people's family. Though the highway terms is being updated, yet avoid the crowded current situation of getting on the car of unavoidable highway, in addition, the speed is improved gradually, the malignant traffic accident is happening all the time, have brought the enormous life and property loss to people and the society. Car anticollision system whether one can send out seeing and hearing survey device of warning signal in advance to driver. It install, at car, can survey, attempt pedestrian, vehicle or barrier around close the automobile body usually; Can send out and collide the dangerous signal soon to driver and passenger ahead of time, impel driver bypass driver take emergency measure punish special dangerous situation even, avoid losses. At present, though various countries study, prevent system of colliding from (usually call the initiative security system in the world), but how could solve the timid and alert problem better, perplexing relevant workers all the time. The researcher in the world studies through a large number of experiments, has already reached common understanding, if want to solve problem described above effectively, the anticollision system must have the following functions:1)Must be capable of examining the angle, the azimuthal information ofthe goal is essential for removing emptily and alertly(2)Apt to produce anti-interference performance strong complicated transmission signal, cooperate with real-time high-efficient signal deal with with goal measuring algorithms, in order to remove emptily and alertly.Only the above two points combine together and guarantee the systematic dependability that the car defends colliding closely.1 TMC2023 chip and the nRF24E1 chip characteristic introduced TMC2032 is one kind of new entire digital correlation instrument electric circuit, its correlation word length and the related threshold are programmable. This chip is the monolithic 64 CMOS entire numeral correlation instrument large scale integrated circuit which American TRW Corporation recent years promoted, its interior had three independent clocks 8 displacements positions registers (stochastic data register A, local code register B and shield code register M); Moreover also has 7 registers to use for to load pre-placed limit. 0 ~ 64 between wilfully long stochastic data and the local code after the correlation operation, by the three samit the cushion 7 BCD code output, and limit compare with the initialization in the comparator, if the correlative value is bigger than or is equal to limit, then the flag bit by lowly changes high. Because has used the advanced high speed CMOS production craft, the parallel correlation speed reaches as high as above 30MHz. But widely applies to synchronization, the matched filtering, harms in the code examination, the recording and the bar code recognition, especially suits to the radar signal recognition. NRF24E1 is one kind of operating frequency may achieve 2.4GHz the wireless radio frequency receiving and dispatching chip, the channel operation time is smaller than 200 mu s, the data rate is 1Mbps outside, does not need to meet the SAW filter, is global general low cost radio frequency system level chip which the present world promotes for the first time.The interior inlays has with 8,051 compatible microprocessors and 10 9 inputs A/D switches, may between under the 1.9V ~ 3.6V voltage the steady work; The interior also inlays have impress the adjuster and the VDD voltage monitoring device. Wireless receiving and dispatching partially has with the nRF2401 similar function, this function starts by the internal parallel mouth and internal SPI, each due-out signal says regarding the processor all may take severs carries on the programming, or gives the microprocessor through the GPIO port biography. Chip nRF24E1 may realize the wireless communication in world public frequency band scope 2.4 ~ 2.5GHz. Receives and dispatches the partial packages to include the frequency divider, the amplifier, the regulator and two receiving and dispatching units. The output energy, the frequency band and other radio frequency parameter passable radio frequency registers conveniently have programmed the adjustment. Under the transmission pattern, the current consumption only has 10.5mA; Under the receive pattern, the current consumption only has 18mA, therefore the power loss is quite low.2 systems structures entire wrap information gathering system is composed by five sets of radio frequencies launches and the receiving device, each set of launches and the receive partial basic electric circuits all are same, these five sets of transmitter-receiver set also is connected with the DSP central processor, the central processor is responsible for the data which calculates them to pass on, makes the decision-making according to the actual situation. Each set of launches and receiving device structure like chart 1 shows. First by as the core radio frequency transmission circuit produces the high frequency electromagnetic wave take nRF24E1, then the modulation signal which sends by correlation operation chip TMC2032 to it carries on the modulation,thus produces with other radio frequency receiving and dispatching unit different radio-frequency signals, prepares for full for the receive. In order to enable the electromagnetic wave signal to have the enough far propagation distance, but also needs to modulate after the signal to carry on the enlargement, completes this function the electric circuit is the merit puts the electric circuit. Finally passes on airborne to a such signal. When sends out the electromagnetic wave meets when the obstacle returns, first must after correlation operation chip TMC2032 to it carry on the recognition, if the same group launches partially sends receives, and further bequeaths this signal the radio frequency receive part; Otherwise refuses to receive. Then the receive partially produces according to the electromagnetic wave in the airborne dissemination The phase moved calculates the time which its dissemination consumes, again calculates the obstacle and this group of receiving and dispatching partial distances. Finally gives this distance information the central processor. Central processing monolithic confidential at the same time the distance information which passes on to five groups of radio frequencies receiving and dispatching unit makes the computation, obtains obstacle and vehicle spatial position which measured. Reaches this point, the obstacle information gathering work basically completes, is left over is bequeaths again this comprehensive information the higher paraffin central processor, lets it make the final decision-making。
智能停车场中英文对照外文翻译文献(文档含英文原文和中文翻译)智能停车场最近几年来汽车的动态平衡与静态管理已成为许多专家学者重点研究的新课题。
智能停车场系统为了保证车辆安全和交通方便,迫切需要采用自动化程度高、方便快捷的停车场自动管理系统,提高停车场管理水平。
现阶段的目标就是要提供满足人们工作、生活、娱乐环境更科学、规范、有效快捷、安全、方便的智能停车场自动管理系统。
停车场管理系统正在向大型化、复杂化、集成化和高科技化方向发展,智能停车场系统已经被纳入智能建筑的一个重要子系统,并且正与智能建筑的其它子系统进一步高度集成。
智能停车场管理系统采用先进技术和高度自动化的机电设备,将机械、电子计算机和自控设备以及智能IC卡技术有机地结合起来,通过电脑管理可实现车辆出入管理、自动存储数据等功能,实现脱机运行并提供—种高效管理服务的系统。
新型的智能停车场将生活理念和建筑艺术、信息技术、计算机电子技术等现代高科技完美结合,提供的是一种操作简单、使用方便、功能先进的人性化系统。
它依靠高科技,以人为本,采用图形人机界面操作方式,提供一种更加安全、舒适、方便、快捷和开放的智能化、信息化生活空间,促进了人文环境的健康发展。
1 目前国内外停车场主要有以下几种类型1.1 机械式停车场机械式停车场是国内停车场主要的一种,机械式停车场是指停车场完全由机械停车设备如曳引驱动机、导向轮、载车板、横移装置、控制柜、召唤操作盘、升降回转装置、搬运器等构成。
分为升降横移类、垂直循环类、水平循环类、多层循环类、平面移动类、垂直升降类、简单升降类等类型。
因其停车方式多样独特,具有很强的应用性。
它的主要优点有占地面积小,选型多样、可具体结合场地特点设计,也可与其他方式相结合来实施,自动化程度高,操作使用方便,管理和维护也较为容易,具有定量存车的特点。
1.2 平面停车场系统智能停车场系统平面停车场系统因其主要采取感应式IC卡读卡方式,所以也叫感应式停车场系统。
能看、能听、有知觉、具嗅觉、会说话的智能汽车?还能自动驾驶?这听起来或许像是在做梦,但计算机革命正致力于把这一切变为现实。
智能汽车米基奥•卡库即便是过去70年间基本上没有多少变化的汽车工业,也将感受到计算机革命的影响。
汽车工业是20世纪最赚钱、最有影响力的产业之一。
目前世界上有5亿辆车,或者说每10人就有1辆车。
汽车工业的销售额达一万亿美元左右,从而成为世界上最大的制造业。
汽车及其行驶的道路,将在21世纪发生重大变革。
未来“智能汽车”的关键在于传感器。
“我们会见到能看、能听、有知觉、具嗅觉、会说话并能采取行动的车辆与道路,”正在设计未来智能汽车和智能道路的通用汽车公司ITS项目的技术主任比尔•斯普雷扎预言道。
美国每年有大约4万人死于交通事故。
在汽车事故中死亡或严重受伤的人数太多,我们已经不屑在报纸上提及。
这些死亡的人中至少有半数是酒后开车者造成的,另有许多死亡事故是驾驶员不小心所导致。
智能汽车能消除绝大多数这类汽车事故。
它能通过会感测空气中的酒精雾气的电子传感器检测开车者是否喝醉酒,并拒绝启动引擎。
这种车还能在遇窃后通报警方,告知车辆的确切地点。
能监控行车过程以及周围行车状况的智能汽车已经建造出来。
藏在保险杠里的微型雷达能对周围的汽车作扫描。
如果你发生重大行车失误(如变道时有车辆在你“盲点”内),计算机立即会发出警报。
在麻省理工学院媒介实验室,业已制造出能测知你行车时有多少睡意的样车,这对长途卡车司机意义尤其重要。
一连数小时注视着中夹分道线这样一个单调、几乎能催眠的过程是被严重低估的威胁生命的重大隐患。
为消除这一隐患,藏在仪表板里的一架微型相机可对准开车者的脸部及眼睛。
如果司机的眼帘合上一定时间,行车变得不稳,仪表板里的计算机就会向司机发出警报。
智能车牌识别系统智能车牌识别系统是采用车牌识别技术做为基础,应用与停车场、高速路口、收费通道等场所的车辆管理系统。
车牌识别技术(Vehicle License Plate Recognition,VLPR) 是指能够检测到受监控路面的车辆并自动提取车辆车牌信息(含汉字字符、英文字母、阿拉伯数字及号牌颜色)进行处理的技术。
车牌识别是现代智能交通系统中的重要组成部分之一,应用十分广泛。
它以数字图像处理、模式识别、计算机视觉等技术为基础,对摄像机所拍摄的车辆图像或者视频序列进行分析,得到每一辆汽车唯一的车牌号码,从而完成识别过程。
通过一些后续处理手段可以实现停车场收费管理,交通流量控制指标测量,车辆定位,汽车防盗,高速公路超速自动化监管、闯红灯电子警察、公路收费站等等功能。
对于维护交通安全和城市治安,防止交通堵塞,实现交通自动化管理有着现实的意义。
随着社会经济的发展、汽车数量急剧增加,对交通控制、安全管理、收费管理的要求也日益提高,运用电子信息技术实现安全、高效的智能交通成为交通管理的主要发展方向。
汽车车牌号码是车辆的唯一“身份”标识,智能车牌识别系统可以在汽车不作任何改动的情况下实现汽车“身份”的自动登记及验证,这项技术已经应用于公路收费、停车管理、交通诱导、交通执法、公路稽查、车辆调度、车辆检测等各种场合。
智能车牌识别系统的几种应用方式:1、监测报警对于纳入“黑名单”的车辆,例如:被通缉或挂失的车辆、欠交费车辆、未年检车辆、肇事逃逸及违章车辆等,只需将其车牌号码输入到应用系统中,智能车牌识别设备安装于指定的路口、卡口或由执法人员随时携带按需要放置,系统将识读所有通过车辆的车牌号码并与系统中的“黑名单”比对,一旦发现指定车辆立刻发出报警信息。
系统可以全天不间断工作、不会疲劳、错误率极低;可以适应高速行驶的车辆;可以在车辆行使过程中完成任务不影响正常交通;整个监视过程中司机也不会觉察、保密性高。
应用这种系统将极大地提高执法效率。
智能停车场系统中英文对照外文翻译文献(文档含英文原文和中文翻译)原文:Intelligent parking systemAbstractThe basic concepts of the parking reservation system and parking revenue management system are discussed in this paper. The proposed intelligent’’ parking space inventory control system that is based on a combination of fuzzy logic and integer programming techniques makes ‘‘on line’’ decisions whether to accept or reject a new driver's request for parking. In the first step of the proposed model, the best parking strategies are developed for many different patterns of vehicle arrivals. These parking strategies are developed using integer programming approach. In the second step, learn-ing from the best strategies, specific rules are defined. The uniqueness of the proposed approach is that the rules arederived from the set of chosen examples assuming that the future traffic arrival patterns are known. The results were found to be close to the best solution assuming that the future arrival pattern is known.Keywords: Traffic; Uncertainty modeling; Control; Parking; Fuzzy logic 1.IntroductionEvery day a significant percentage of drivers in single-occupancy vehicles search for a parking space. Additionally, less experienced drivers or out-of-towners further contribute to the increase of traffic congestion. Search for a vacant parking space is a typical example of a search process. Every parking search strategy is composed of a set of vague rules. It is usually difficult to describe these rules explicitly. The type of the planned activity, time of a day, day of the week, current congestion on particular routes, knowledge of city streets, and potentially available parking places have significant influence on a chosen parking search strategy. During the last four decades numerous parking search models have been developed (Vander Goot, 1982; Axhausen and Polak, 1991; Polak and Axhausen, 1990; Young et al., 1991a,b; saltzman, 1997; Shoup, 1997; Steiner, 1998; Thompson and Richardson, 1998; Arnott and Rowse, 1999; Tam and Lam, 2000; Wong et al., 2000; Waterson et al., 2001). In many decision-making situations in transportation (modal split, choice of air carrier, choice of airport, etc.) the competitive alternatives and their characteristics are reasonably well known in advance to the decision maker (passenger, driver). On the other hand, the drivers usually discover diffierent parking alternatives one by one in a temporal sequence. Clearly, this temporal sequence has a very strong influence on the driver's final decision about the parking placeDuring the past two decades, traffic authorities in many cities (Helsinki, Cologne, Mainz, Stuttgart, Wiesbaden, Aalborg, Hague) havestarted to inform and guide drivers to parking facilities with real-time var-iable message signs [directional arrows, names of the parking facilities, status (full, not full, number of available parking spaces, etc.)]. Information about the number of available parking spaces could be displayed on the major roads, streets and intersections, or it could be distributed through the Internet.It is logical to ask the question about the benefits of the parking guidance systems. Current practice shows that parking guidance systems usually do not change the occupancy rate or average parking duration. Drivers easily become familiar with the parking guidance systems, and majority of them use, thrust and appreciate the help of the systems. Guidance systems significantly increase the probability of finding vacant parking space, mitigate frustration of the drivers–visitors unfamiliar with the city center, decrease the queues in front of parking garages, decrease the total amount of vehicle-miles traveled (particularly in the city centers), decrease the average trip time, energy consumption, and air pollution. Parking guidance system is a part of comprehensive parking policy and traffic management system, whose other elements are street parking control (including sanctions for the illegally parked vehicles), parking fare structure, and parking revenue management system.Parking guidance systems help drivers to find vacant parking spaces when they are already on the network, and approaching their final destination. Throughout this research the concepts of the parking reservation system and parking revenue management system are proposed. Such systems would help drivers to find a vacant parking space even before beginning their trip. The proposed ‘‘intelligent’’parking space inventory control system that is based on the combination of simulation, optimization techniques, and fuzzy logic makes ‘‘real-time’’ decisions as to whether to reject or accept a new request for parking. The proposedmethodology could be applied for parking lots and parking garages in cities and at the big international airports.The paper is organized as follows:1. Parking-pricing problems are presented in Section 2. Analogies between parking problems and some other industries are presented in Section 3. The parking revenue management system is introduced in Section 4, and the Intelligent parking space inventory control system is introduced in Section 5. The algorithm to create intelligent parking spaces inventory control system is presented in Section 6. Results obtained with the ‘‘intelligent’’ parking system are given in Section 7, and Sec-tion 8 presents the concluding remarks and further research orientations.2.parking pricingIn majority of cities throughout the world drivers pay for using different parking facilities. In some instances, traffic congestion can be significantly reduced as a result of parking price. The parking revenue is usually used to cover parking facility costs (access gates, ticket printers, parking meters, parking signs, attendants), or to improve some other traffic and transportation activities. Different parking pricing strategies should be a part of the comprehensive solution approach to the complex traffic congestion problems. There is no doubt that parking pricing represents one of the important demand management strategies. For example, traffic authorities, local governments and private sector could introduce higher parking tariffs for solo drivers or for long-term parkers in congested city areas. They could provide special parking discounts to vanpoolers. Obviously parking pricing should be carefully studied in the context of the considered city area (down-town, residential, commercial, retail use areas).In some cities (Madison, Wisconsin) there are already time dependent parking fees that force commuters to switch to diffierent alternativesof public transportation . Trying to promote public transit San Francisco traffic authorities increased parking tariffs at public and commercial garages. The Chicago authorities raised parking rates few times. As a consequence, the total number of cars parked significantly decreased, as well as parking duration time. The greatest decrease was in the number of all day parkers. Authorities in Seattle significantly reduced parking tariffs for carpool at two Seattle parking facilities in downtown . Active role in parking pricing strategies could also have employers paying for employees' parking. Employers who remove parking subsidies for the employees could significantly decrease the total number of solo drivers. The main role of any parking pricing strategy should be reducing the total number of vehicle trips during certain time periods, shifting commuters to alternative transportation modes, and to different parking locations. At the same time, when trying to implement any parking strategy, it is very important to provide enough parking space for shoppers, to provide preferential parking for residents in considered city area, to provide preferential parking for different parking locations, to consider low income families, and to protect streets in the neighborhood from illegal parking.The basic economic concepts of supply and demand should be more utilized when solving complex traffic congestion and parking problems (Vickrey, 1969, 1994; Verhoef et al., 1995). So-called value pricing is also known as congestion pricing, or variable tolling. The basic idea behind the concept of congestion pricing is to force drivers to travel and use transportation facilities more during off-peak hours and less during peak hours. The idea of congestion pricing is primarily connected with the road (drivers pay for using private, faster roads, drivers with lower vehicle occupancy pay for using High Occupancy Vehicle lanes, drivers pay more to enter city's downtown on weekdays) or airportoperators (more expensive landing fees during peak hours). In the context of parking problems, this means: (a) that different parking tariffs should exist for different users; (b) that the parking fees should increase and/or decrease few times during a day.3.Parking problems and revenue management systems: Analogies with some other industriesAirline industry, hotels, car rental, rail, cruise, healthcare, broadcast industry, energy industry, golf,equipment rental, restaurant, and other industries are utilizing revenue management concepts when selling their products (Cross, 1997). Revenue management could be described as a group of different scientific techniques of managing the company revenue when trying to deliver the right product to the right client at the right price at the right time. The roots of the revenue management are in the airline industry. The basic characteristics of the industries to which different revenue management concepts were successfully applied are: (a) variable demand over time; (b) variable asset utilization; (c) perishable assets; (d) limited resources; (e) market segmentation; (f) adding new capacity is expensive, difficult or impossible; (g) direct cost per client is negligible part of the total cost of making service available; (h) selling products in advance. The main characteristics of the parking space inventory control problems are the following:· Parking demand is variable over time.· Like hotel rooms, or restaurant chairs, parking spaces also have daily opportunity to be ‘‘sold’’ (used by clients).·Any parking lot or garage has limited number of parking spaces that can be used by drivers· Market segmentation means that different customers are willing to pay different prices for the same asset (hotel room, airline seat, seat ina rented car). Businessman wanting to park a car near a meeting point 15 minutes before the meeting would be ready to pay much higher parking fee than a pensioner planning to walk with his wife through the downtown, who made parking reservation four day in advance.· Building new garages and parking lots could be very expensive and sometimes very difficult.· Parking places can be easily reserved in advance.Introducing and developing parking reservation system (created in an Internet and cell phone environ-ment) would present further improvement in modern parking technologies. Drivers would be advised and guided before beginning of the trip, as well as during the trip. Parking reservation system should be coupled with the parking revenue management system. In this way, parking operators and traffic authorities would be able to implement different parking strategies. Once the driver is allowed to park, it is possible to implement internal garage guidance system that guides the driver to an empty parking place.4.Introducing parking revenue management systemLet us assume that we have parking reservation system. Drivers make their requests for parking at random moments of time (by phone from home, by cell phone while driving, through the Internet, etc.).A certain number of drivers would maybe cancel their reservations before beginning of the parking.These cancellations would also be made at random moments of time. Like in some other industries, a certain number of drivers would not appear in parking garage for which they have a con-firmed reservation and purchased ticket. Would these drivers be penalized for their behavior? Depending on ration between parking demand and parking supply, the answer could be ‘‘Yes’’ or ‘‘No’’.Reservation system should be flexible enough allowing some drivers to appear right before wished beginning of parking, looking for an emptyspace in a garage, even though they do not have a confirmed reservation. Would it be good to have few different parking tariffs? The answer is obviously ‘‘Yes’’. Drivers paying lower parking tariffs could be disabled and senior citizens, people who reserve parking space few days in advance, or HOV drivers. Drivers paying higher tariffs could be solo drivers, long term parking drivers, or drivers showing up and asking for parking without making reservation in advance. Obviously, there is a lot of possible parking pricing strategies.The stochastic nature of reservation generation and cancellation, the stochastic nature of driver show-up during reserved time slot, variety of parking tariffs, and the need to respond to drivers' requests in real time, indicate that the management of parking garage revenues represents a complex problem.In the past 30 years a relatively large number of papers have been devoted to different aspects of the air-line seat inventory control problem (Littlewood, 1972; Belobaba, 1987; Brumelle and McGill, 1993; Teodorovic et al., 2002). The model proposed in this paper is highly inspired by the developed airline yield management stochastic and/or deterministic models.Let us assume that we have few different parking tariffs. The simplest reservation system (similar to some airline reservation systems in the past) could be ‘‘distinct tariff class parking space inventories’’ (Fig. 1(a)),indicating separate parking spaces in the garage for each tariff class. In this case, once the parking space is assigned to a tariff class, it may be booked only in that tariff class or else remains unsold. There are certain advantages, as well as certain disadvantages in the case of distinct parking space inventories. In this case users paying lower tariffs would be relatively well ‘‘protected’’. In other words, this system would pay a lot of attention to the disabled person, senior citizens,people who reserve parking space few days in advance, and HOV drivers. Obvious disadvantage of the distinct parking space inventories is the fact that very often some parking spaces assigned to lower tariff users would be empty even the higher tariff users demand is very high. In other words, it would be possible to reject some drivers even all parking spaces in garage are not occupied.In case of a ‘‘nested reservation system ’’, the high tariff request will not be rejected as long as any parking spaces are available in lower tariff classes. For example, if we have four tariff classes, then there is no booking limit for class 1, but there are booking limits (BLi, i = 2, 3, . . ., m) for each of the remaining three classes (Fig. 1(b)). As we can see from Fig. 1(b), all parking spaces are always available to class1. There are always a certain number of parking spaces protected for class 1, certain number of parking spaces protected for classes 1 and 2, and certain number of parking spaces protected for classes 1, 2 and 3. If we make a request-by-request revision of booking limits, there is no longer a difference between distinct and nested reservation system.In this research (like in the paper of Teodorovic ´ et al., 2002) an attempt was made to make reservation decisions on theBL1BL2BLmCBL1=CBL2BLm (a)(b)Fig.1‘‘request-by-request’’ basis. In the scenario that we consider, we assume that there are more than two types of tariffs. The basic characteristic of the parking space inventory control model that we propose is ‘‘real-time’’ decision making about each driver request. The developed model is called an ‘‘intelligent’’ parking space inventory control system.译文:智能停车场系统摘要:本文讨论停车预订系统和停车收入管理系统的基本概念.拟议的智能停车空间的库存控制系统,基于模糊逻辑和整数规划技术相结合,使“上线”决定是否接受或拒绝新的驱动程序的停车要求。
附件1:外文资料翻译译文建立一个自动车辆车牌识别系统车辆由于数量庞大的抽象,现代化的城市要建立有效的交通自动系统管理和调度。
最有用的系统之一是车辆车牌(心室晚电位)辨识系统,它能自动捕获车辆图像和阅读这些板块的号码在本文中,我们提出一个自动心室晚电位识别系统,ISeeCarRecognizer,阅读越南样颗粒在交通费的注册号码。
我们的系统包括三个主要模块:心室晚电位检测,板数分割和车牌号码识别。
在心室晚电位检测模块,我们提出一个有效的边界线为基础Hough变换相结合的方法和轮廓算法。
该方法优化速度和准确性处理图像取自不同职位。
然后,我们使用水平和垂直投影的车牌号码分开心室晚电位分段模块.最后,每个车牌号码将被OCR的识别模块实现了由隐马尔可夫模型。
该系统在两个形象评价实证套并证明其有效性是适用于实际交通收费系统。
该系统也可适用于轻微改变一些其他类型的病毒样颗粒。
一.导言心室晚电位识别的问题是一个非常有趣,但困难的一个问题.这在许多交通管理系统中是非常有用的.心室晚电位识别需要一些复杂的任务,如心室晚电位检测,分割和承认。
这些任务变得更加复杂时,处理各种倾斜角度拍摄的图像或板噪音板的图像。
由于此问题通常是在实时系统中使用,它不仅需要准确性,而且要效率。
大多数心室晚电位识别应用通过建立减少一些复杂的约束的位置和距离相机车辆,倾斜角度。
通过这种方式,心室晚电位识别率识别系统已得到明显改善.在此外,我们可以更准确地获得通过一些具体的当地样颗粒的功能,如字符数,行数在一板,或板的背景颜色或的宽度比为一板高.二.相关工作心室晚电位的自动识别问题在20世纪90年代开始就有研究。
第一种方法是基于特征的边界线。
首次输入图像处理,以丰富的边界线的一些信息如梯度算法过滤器,导致在一边缘图像。
这张照片是二值化处理,然后用某些算法,如Hough变换,检测线。
最终,2平行线视为板候选人[4] [5]。
另一种方法是基于形态学[2]。
这种方法侧重于一些板块图像性质如亮度,对称,角度等.由于这些特性,这种方法可以检测出图像中的某些相似的性质和找到车牌区域的位置。
第三种方法是基于纹理[3]。
在这种方法中,一个心室晚电位被认为是一个对象和不同的纹理帧。
大小不同的纹理窗框用于检测板的候选人。
每个人获得通过一个分类,以确认它是否是一个盘子或没有。
这常用的方法是寻找图像中的文字任务。
此外,已经出现了一些其他有关这个问题的方法上注重检测心室晚电位在视频数据。
三.拟议的系统我们的系统,ISeeCarRecognizer,由四个模块:前处理,心室晚电位检测,字符分割,和光学字符识别(OCR),在其中最后三个模块处理三个主要问题一个心室晚电位识别域。
是VLP检测模块接收到的图像有被处理的预处理模块 -第一个输入该系统的模块。
这个模块的结果图像发送到分段模块。
分割段模块板的图像,成为独立的characterimages。
这些字符的图像,然后认可光学字符识别模块和最终结果是ASCII字符和板块中的数字。
1.预处理从相机拍摄的图像进行处理的预处理模块。
本模块的目的是丰富的边缘特征。
由于我们的检测方法在边界上的基地功能,它可以改善成功率的心室晚电位检测模块。
该算法在此模块顺序使用的老龄化,规范化和直方图均衡。
在得到一个灰阶图片中,我们使用过滤器来提取索贝尔边缘图像,然后以一个二进制阈值的一个图像。
我们用于局部自适应阈值算法二值化的一步。
特别是,我们发展一种基于动态规划,优化其速度,使其适用于实时应用[1]。
图像的结果被用作心室晚电位检测模块的输入。
2.心室晚电位检测算法在边界为基础的方法,最重要的步骤是检测边界线。
最有效的算法之一是Hough变换申请提取的二进制映像线从对象的图像。
然后我们找两平行线,其包含的区域被认为platecandidates。
然而,这种方法的缺点是,霍夫变换的执行时间需要太多多的运算时,被应用到一个二进制图像与大量的像素。
特别是,较大的图像慢的算法。
该算法的速度可能会通过细化图像改进,然后再应用霍夫变换。
然而,细化算法也慢。
这种限制使这种方法不适合实时交通管理系统。
该算法在本系统中我们采用的是组合Hough变换的算法和轮廓产生更高的精度和更快的速度,它可以适用于实时系统。
1)结合Hough变换和轮廓算法心室晚电位检测我们的做法是:从提取的边缘图片中,我们使用封闭的轮廓检测算法边界的对象。
这些轮廓线改造到霍夫协调,找到两个平行线互动(2 -平行线之一成立回另两平行线并建立一个平行四边形表对象)是作为板候选人考虑。
由于有相当少(黑)在等高线的像素,转化这些需要协调霍夫点少得多计算。
因此,该算法的速度提高没有明显的精度损失。
然而,有些板块可能会覆盖眼镜或装饰灯。
这些对象还可能有形状两个相互作用二平行线,因此是错误地检测为板候选人。
要拒绝这样不正确的候选人,我们评估一个模块的实施无论候选人是板或没有。
2)板考生核查从两个候选人的水平线,我们可以如何准确地计算出它从水平倾斜坐标。
然后,我们应用旋转转换调整它为平角。
经过处理,这些标准二进制板候选区域被传递给一个号码启发式检测和评估算法。
我们的评价板候选人在两个算法基地主要步骤,分别采取。
这两个步骤是:(1)评价之间的高度和宽度的比例候选人,(2)使用水平横切来计算数切入候选人的对象。
我们只选择了检查和候选人有宽度与高度之比满足预先定义约束:minWHRatio<宽/高<maxWHRatio既然有两种主要类型的越南板:1 -行和2行,我们有两个充足两种类型的限制。
3.5<宽/高<4.5一排板候选人0.8<宽/高<1.4二排板候选人。
这些候选人是满足了上述两个一约束选择,并传递到下一个评估。
利用水平评价横切。
在这个阶段,我们使用两个水平削减和再算上该由这些横切削减对象的数量。
一候选人将被视为一个盘子,如果数量的减少选择对象为每个板块在一定范围内适当通过实验类型。
这个数字必须在数量大致范围在一类病毒颗粒的字符,我们有两个合适的约束两个越南板类型:预处理OCR的分割拍摄的图像心室晚电位检测从相机许可证帕泰字符:4≤1≤8ñ排板候选人7≤2≤n时排板候选人16与N是禁对象的数量。
候选人是满足了上述两个约束选定为最终结果。
在我们的制度,我们实施的1 /3两hoziontal削减和2 / 3的板候选人的高度。
平均的数目切对象将被计算。
这种评估有助于确定正确的板候选人。
(3).分割要正确认识字,我们要一车牌图像二值图像的设置只包含一车牌字符。
这些形象将被传递到对于OCR的识别模块。
这个任务常见的算法是运用预测。
然而,在一些情况下,无法正常工作。
我们现在将描述我们在分割方法添加一些增强此方法。
我们用一个水平投影检测和部分行排在二板。
因为二进制图像进行了调整板他们的倾斜角度为零,分割结果的行几乎是完美的。
与最低值的位置水平投影是启动或在最后一排板。
不同形式的行分割,字符分割更为困难,因为许多原因,如卡字符,螺丝,和泥覆盖板。
这些噪音事情的原因使用的字符分割算法垂直投影,有一些错误。
在一些最严重的图像质量差板的情况下,一个字符可以分割成两部分。
我们应用的若干制约因素比到一个字符的宽度高度。
我们寻求的最低值在垂直投影,只有这给削减最低位置件满足所有预定义的限制被认为是字符分割点。
通过此增强,我们在这项任务中取得了较好的效果。
经过这一步,我们有一个人物候选人名单。
并不是所有的考生实际上是人物形象。
到那时,我们可以重新评估候选人是否板是一盘或不检查的字符数候选人。
在越南,一盘只包含7或8字符。
最后一盘的候选人,连同与他们的字符列表传递到OCR模块负责确认。
(4).用于光学字符识别隐马尔可夫模型在这个系统中,我们使用的字符的HMM模型承认。
我们的特点,在此模型中使用的在窗口中的比例前景像素。
我们使用的9× 9大小的窗口,这个扫描在图像窗口中,从左至右,从上到下这些窗口可以由两个互相重叠三分之二的大小。
通过这种方式,我们有一个特征向量其中包括196值。
在识别模块,我们需要一个字符分类成一个形象的36个班(26个英文字母:甲,乙,丙...和10个数字字符:0,1,2 ...)。
要培养我们的模型,我们使用的训练,是从图像中提取套病毒样颗粒。
对每类样本数约为60.These提取样品图像实时心室晚电位一点点的噪音,所以在良好的训练,该模型可以正是认识到板的同类型的噪音。
在最后一步,我们使用越南的一些具体规则病毒样颗粒以提高准确性。
我们了解到,第三次在车牌字符必须是字母,四是有时信,但通常是一个数字,其他位置当然是数字。
四.实证评价我们的系统进行了评价与越南两个套车辆的车牌。
图像由索尼DC350数码相机,具有800x600像素大小,在不同地点和时间。
我们使用Microsoft Visual C++ 6.0,运行惠普工作站X2000奔腾IV,1.4千兆赫,512 MB的的RAM,Windows XP操作系统。
五.结论和未来工作该系统运行良好的越南各类心室晚电位的图像,甚至抓伤,缩放板的图像。
在此外,它可以处理多个板块中的案件相同的图像,或不同类型的车辆,如摩托车板,汽车板或车板。
然而,它仍然有几个错误在处理劣质板材。
我们正在数的算法在预处理模块。
其目的是探测地区的第一盘地区可能,从而减少计算成本的心室晚电位检测算法。
在此外,我们打算结合的纹理为基础的数方法,和机器学习的方法来评价platecadidates。
我们相信,这些将提高信息的准确性和该算法的速度进一步。
索引词:车载车牌识别,实时系统,Hough变换,轮廓算法。
附件2:外文原文(复印件)Building an Automatic Vehicle License-PlateRecognition SystemAbstract—Due to a huge number of vehicles, modern cities need to establish effectively automatic systems for traffic management and scheduling.One of the most useful systems is the Vehicle License-Plate (VLP) Recognition System which captures images of vehicles and read these plates’ registration numbers automatically.In this paper, we present an automatic VLP Recognition System, ISeeCarRecognizer, to read Vietnamese VLPs’ registration numbers at traffic tolls.Our system consists of three main modules: VLP detection, plate number segmentation, and plate number recognition.In VLP detection module, we propose an efficient boundary line-based method combining the Hough transform and Contour algorithm.This method optimizes speed and accuracy in processing images taken from various positions. Then, we use horizontal and vertical projection to separate plate numbers in VLP segmentation module.Finally, each plate number will be recognized by OCR module implemented by Hidden Markov Model.The system was evaluated in two empirical image sets and has proved its effectiveness (see section IV) which isapplicable in real traffic toll systems. The system can also be applied to some other types of VLPs with minor changes.I. INTRODUCTIONThe problem of VLP recognition is a very interesting butdifficult one.It is very useful for many trafficmanagement systems.VLP recognition requires some complex tasks, such as VLP detection, segmentation and recognition.These tasks become more sophisticated when dealing with plate images taken in various inclined angles orplate images with noise.Because this problem is usually used in real-time systems, it requires not only accuracy but also fast processing.Most VLP recognition applications reduce the complexity by establishing some constrains on the position and distance from the camera to vehicles, and the inclined angles.By that way, the recognition rate of VLP recognition systems has been improved significantly.In addition, we can gain more accuracy by using some specific features of local VLPs, such as the number of characters, thenumber of rows in a plate, or colors of plate background, or the ratio of width to height of a plate .II. RELATED WORKThe problem of automatic VLP recognition has beenstudied since 1990s.The first approach was based on characteristics of boundary lines.The input image was first processed to enrich boundary lines’ information by some algorithms such as the gradient filter, and resulted in an edging image.This image was binarized and then processed by certain algorithms, such as Hough transform, to detect lines.Eventually, couples of 2-parallel lines were considered as a plate-candidate [4][5].Another approach was morphology-based [2].This approach focuses on some properties of plate images such as their brightness,symmetry, angles,etc.Due to these properties, this methodcan detect the similar properties in a certain image and locate the position of license plate regions.The third approach was texture-based [3].In this approach, a VLP was considered as an object with different textures and frames.The texture window frames of different sizes wereused to detect plate-candidates.Each candidate was passed to a classifier to confirm whether it is a plate or not.This approach was commonly used in finding text in images tasks.In addition, there have been a number of other methods relating to this problem focusing on detecting VLP in video data.III. THE PROPOSED SYSTEMOur system, ISeeCarRecognizer, consists of fourmodules: Pre-processing, VLP detection, charactersegmentation, and optical character recognition (OCR), in which the last three modules deal with three main problems of a VLP recognition domain.The VLP detection module receives images which have been processed by the preprocessing module – the first input module of this system.The resulted images of this module are sent to the segmentation module.The segmentationmodule segments plate-images into separate characterimages.These character-images are then recognized by the OCR module and the final results are ASCII characters andnumbers in plates.A. PreprocessingImages taken from camera were processed by the preprocessing module.The purpose of this module was to enrich the edge features.Because our detection method bases on the boundary features, it will improve the successful rate of the VLP detection module.The algorithms sequentially used in this module are graying, normalizing and histogram equalization.After having obtained a greyscale image, we use Sobel filters to extract the edging image, and then thresholds the image to a binary one.We used the local adaptive thresholding algorithm for the binarization step.Especially, we develop an algorithm basedon dynamic programming to optimize its speed and make it suitable to real-time applications [1].The resulted images are used as inputs for the VLP detection module.B. VLP Detection AlgorithmIn boundary-based approach, the most important step is to detect boundary lines.One of most efficient algorithms is Hough transform applying to the binary image to extract lines from object-images.Then we look for two parallel lines, whose the contained region is considered platecandidates.However, the drawback of this approach is that the execution time of the Hough transform requires too much computation when being applied to a binary image with great number ofpixels.Especially, the larger image theslower the algorithm is. The speed of the algorithm may beimproved by thinning image before applying the Houghtransform.Nevertheless, the thinning algorithm isalso slow. This limitation makes the approach unsuitable for real timetraffic management systems.The algorithm we used in this system is the combination of the Hough Transform and Contour algorithm which produces higher accuracy and faster speed so that it can be applied to real time systems.1) Combine Hough Transform and Contour Algorithm for Detecting VLPOur approach is as follows: from the extracted edging image, we use the contour algorithm to detect closed boundaries of objects.considered as a plate-candidate.Since there are quite few(black) pixels in the contour lines, the transformation ofthese points to Hough coordinate required much lesscomputation. Hence, the speed of the algorithm is improved significantly without the loss of accuracy .However, some plates may be covered by glasses ordecorated with headlights.These objects may also have the shape of two interacted 2-parallel lines, and therefore, arealso falsely detected as plate-candidates. To reject suchincorrect candidates, we implement a module for evaluating whether a candidate is a plate or not.2) Plate-Candidates VerificationFrom the two horizontal lines of a candidate, we can calculate exactly how inclined it was from horizontal coordinate. Then we apply a rotate transformation to adjust it to straight angle. After processed, these straight binaryplate-candidate regions were passed to a number ofheuristics and algorithms for evaluating.Our evaluating plate-candidates algorithm bases on twomain steps, which are taken respectively. The two steps are:(a) evaluate the ratios between the heights and the widths of the candidates, (b) use horizontal crosscuts to count the number of cut-objects in the candidates.In this stage, we check and only select out candidates that have the ratios of width to height satisfying pre-defined constraint: minWHRatio < W/H < maxWHRatioSince there are two main types of Vietnamese plates: 1-row and 2-row , we have two adequate constraints for two types.3.5 < W/H < 4.5 with 1-row plate-candidates0.8 < W/H < 1.4 with 2-rowplate-candidatesThose candidates which satisfied one of the two aboveconstraints are selected and passed to the nextevaluation.Evaluate by using horizontal crosscutsIn this stage, we use two horizontal cuts and then count the number of objects that are cut by these crosscuts.A candidate will be considered as a plate if the number of cut objects is in the given range chosen suitably for each plate type by experiments .This number must be in the approximate range of the number of characters in a VLP, we have two appropriate constraints for two types of Vietnamese plates:Preprocessing OCR Segmentation. Images taken VLP Detection from camera License-patecharacters:4 ≤ N ≤ 8 with1-row plate-candidates7 ≤ N ≤ 16 with 2-row plate-candidatesWith N is the number of cut-objects.The candidates that satisfied one of the two above constraints are selected as the final result.In our system, we implemented two hoziontal cuts at 1/3and 2/3 of plate-candidate’s height. The average of number of cut objects will be calculated. This evaluation helps to identify the correct plate-candidates.C. SegmentationTo correctly recognize characters, we have to segment a binary plate image to set of images which only contain one license character. These character images will be passed to the OCR module for recognizing. The common algorithm for this task is applying projections. However, in some cases, it does not work correctly. We will now describe our approach in segmentation by adding some enhancements to this method.We use a horizontal projection to detect and segment rows in 2 row plates. Because binary plate images were adjustedtheir inclined angles to zero, the result of row segmentation is nearly perfect. The positions with minimum values of horizontal projection are the start or the end of a row in plate.Different form row segmentation, character segmentation is more difficult due to many reasons such as stuck characters, screws, and mud covered in plates. These noise things cause the character segmentation algorithm using vertical projection to have some mistakes. In some worst cases of bad quality plate images, a character can be segmented into two pieces.We apply several constraints ofratio of the height to the width of a character.We search for the minimum values in the vertical projection and only the minimum positions which give cut pieces satisfied all predefined constraints are considered as the points for character segmentation. By this enhancement,we have achieved better results in this task. After this step,we have a list of character candidates. Not all of the candidates are actually images of characters.By that time, we can re-evaluate whether a plate candidate is a plate or not by checking the number of characters of candidates. In Vietnam, a plate contains only 7 or 8 characters . The final plate candidates, together with their list of characters are passed to the OCR module for recognizing.D. Hidden Markov Model for OCRIn this system, we use the HMM model for characterrecognition. The features which we used in this model are the ratio of foreground pixels in a window.We use a window with the size of 9×9, and scan this window in the image from left to right and top to bottom These windows can overlap each other by two thirds of their size. By this way, we have a feature vector which includes 196 values.In the recognition module, we need to classify a character image into one of 36 classes (26 alphabet letters: A, B, C…and 10 numeric characters: 0, 1, 2…).To train our model, we use training sets which were extracted from images ofVLPs.The number of samples for every class is about60.These samples were extracted from real VLP images with a little noise, so after well trained, the model can recognize exactly plates with the similar types of noise.In the last step, we use some specific rules of Vietnamese VLPs to improve accuracy.We learned that the third character in plate must be a letter, the fourth is sometimes a letter but usually a number, and the other positions are surely numbers.IV. EMPIRICAL EV ALUATIONOur system was evaluated with two sets of Vietnamese vehicles’ plates. Images we re taken by a Sony DC350 digital camera, with size of 800x600 pixels, in different places and times. We use Microsoft Visual C++ 6.0, run on HP Workstation X2000 Pentium IV, 1.4 GHz, 512 MB RAM, Windows XP OS.V. CONCLUSIONS AND FUTURE WORKThe system performs well on various types of Vietnamese VLP images, even on scratched, scaled plate images. In addition, it can deal with the cases of multiple plates in the same image, or different types of vehicles such as motorbikeplates, car plates or truck plates. However, it still has a few errors when dealing with bad quality plates.We are working on a number of algorithms in the preprocessing module. The purpose is to detect regions that are likely plate regions first and thus to reduce the computation cost of the VLP detection algorithm. In addition, we intend to combine a number of texture-based approachs, and machine learning methods to evaluate platecadidates. We believe these will improve the accuracy and the speed of the algorithm furthermore.Index Terms—Vehicle License-Plate Recognition, Real-timeSystem, Hough Transform, Contour Algorithm.。