蜗轮蜗杆计算公式(简洁版)
- 格式:xls
- 大小:70.50 KB
- 文档页数:48
蜗轮的计算公式:1传动比=蜗轮齿数×蜗杆头数2中心距=(蜗轮节圆直径+蜗轮节圆直径)△2三。
蜗轮中径=(齿数+2)×模数4蜗轮齿数×蜗轮模数5蜗杆螺距直径=蜗杆外径-2×模数6蜗杆引线=π×元件×头数7螺旋角(前角)TGB=(模数×头数)×蜗杆节径基本参数:蜗轮蜗杆模数m、压力角、蜗杆直径系数Q、导程角、蜗杆头数、蜗杆齿数、齿高系数(1)、间隙系数(0.2)。
其中,模数m和压力角是蜗轮轴表面的模数和压力角,即蜗轮端面的模数和压力角,两者均为标准值。
蜗杆直径系数q是蜗杆分度圆直径与其模数M的比值。
蜗轮蜗杆正确啮合的条件:在中间平面,蜗杆和蜗轮的模数和压力角分别相等,即蜗轮端面的模数等于蜗杆轴线的模数,即标准值。
蜗轮端面的压力角应等于蜗杆的轴向压力角和标准值,即==M。
当蜗轮的交角一定时,必须保证蜗轮和蜗杆的螺旋方向一致。
蜗轮结构通常用于在两个交错轴之间传递运动和动力。
蜗轮相当于中间平面上的齿轮和齿条,蜗杆和螺钉的形状相似。
分类这些系列大致包括:1。
Wh系列蜗轮减速器:wht/whx/whs/whc2;CW系列蜗轮减速器:CWU/CWS/cwo3;WP系列蜗轮减速器:WPA/WPS/WPW/WPE/wpz/wpd4;TP系列包络蜗轮减速器:TPU/TPS/TPA/tpg5;PW型平面双包环面环面蜗杆减速器;另外,根据蜗杆的形状,蜗杆传动可分为圆柱蜗杆传动、环形蜗杆传动和斜蜗杆传动。
[1]组织特征1该机构比交错斜齿轮机构具有更大的传动比。
2两轮啮合齿面间存在线接触,其承载能力远高于交错斜齿轮机构。
三。
蜗杆传动相当于螺旋传动,即多齿啮合传动,传动平稳,噪音低。
4当蜗杆的导程角小于啮合齿间的等效摩擦角时,该机构具有自锁性能,可以实现反向自锁,即只有蜗杆可以驱动蜗轮,而不能驱动蜗轮。
起重机械采用自锁蜗杆机构,其反向自锁性能能起到安全防护作用。
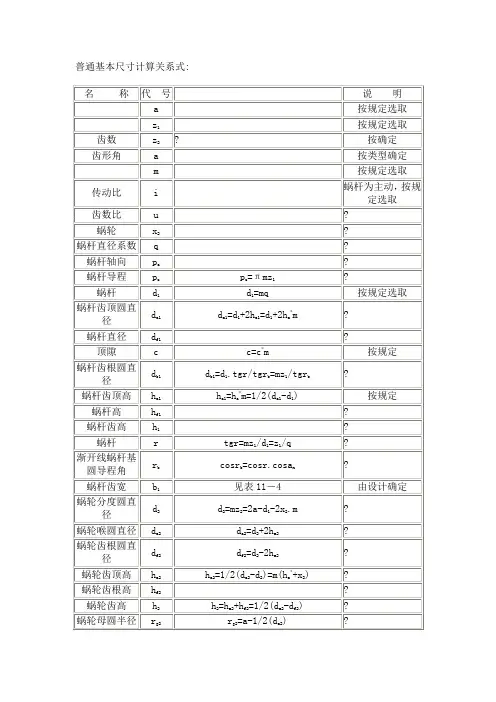
蜗杆基本尺寸计算公式
蜗杆基本尺寸计算公式是根据蜗杆的设计参数和使用要求,计算出蜗杆的基本尺寸的公式。
其中,蜗杆基本尺寸包括蜗杆的螺旋线圈半径、节距、齿深、齿宽等。
蜗杆基本尺寸的计算公式如下:蜗杆螺旋线圈半径r= (中心距) / (1 + 压力角正切值)
蜗杆节距p= π×m
蜗杆齿深h= m
蜗杆齿宽b= (π×d) / (2 ×z)
其中,m为模数,d为蜗杆的分度圆直径,z为蜗杆的齿数。
以上公式中的单位均为国际单位制中的米(m)。
根据上述公式,可以计算出满足要求的蜗杆基本尺寸,并进行蜗杆的制造和使用。
- 1 -。
蜗轮蜗杆尺寸计算公式蜗轮蜗杆传动是一种常见的传动方式,广泛应用于机械设备中。
蜗轮蜗杆传动具有传动比大、紧凑结构、传动平稳等优点,因此被广泛应用于工程机械、船舶、起重机械等领域。
蜗轮蜗杆传动的尺寸计算是设计和制造过程中的重要环节,正确计算尺寸可以保证传动系统的正常运行和传动效率。
下面将介绍一些常用的蜗轮蜗杆传动尺寸计算公式。
蜗轮蜗杆传动的传动比可以通过公式计算得到。
传动比等于蜗轮的齿数除以蜗杆的螺旋线数,即传动比=蜗轮齿数/蜗杆螺旋线数。
传动比的大小决定了传动装置的转速和扭矩的变化情况。
蜗轮和蜗杆的齿数计算公式如下:蜗轮齿数=传动比*蜗杆螺旋线数蜗杆齿数=传动比*蜗轮螺旋线数蜗轮和蜗杆的模数是设计中需要确定的重要参数,模数决定了齿轮的几何形状和尺寸。
蜗轮和蜗杆的模数计算公式如下:蜗轮模数=蜗轮齿数/蜗轮分度圆直径蜗杆模数=蜗杆齿数/蜗杆分度圆直径蜗轮和蜗杆的螺旋角是设计中需要考虑的重要因素,螺旋角决定了蜗轮和蜗杆传动的效率和运动平稳性。
蜗轮和蜗杆的螺旋角计算公式如下:蜗轮螺旋角=tan(蜗轮摩擦角)蜗杆螺旋角=arctan(tan(蜗轮摩擦角)/传动比)蜗轮和蜗杆的分度圆直径是设计中需要确定的重要参数,分度圆直径决定了蜗轮和蜗杆齿轮的尺寸。
蜗轮和蜗杆的分度圆直径计算公式如下:蜗轮分度圆直径=蜗轮模数*蜗轮齿数蜗杆分度圆直径=蜗杆模数*蜗杆齿数蜗轮和蜗杆的齿顶圆直径、齿根圆直径、齿宽等尺寸也需要进行计算。
这些尺寸的计算公式可以根据具体的设计要求和传动装置的工作条件来确定。
蜗轮蜗杆传动的尺寸计算是设计和制造过程中的关键环节。
通过合理的尺寸计算,可以确保传动装置的正常运行和传动效率。
在实际应用中,还需要考虑材料的选择、加工工艺的确定等因素,以确保传动装置的质量和可靠性。
蜗轮蜗杆参数计算公式
蜗轮蜗杆是机械传动的一种经典机构,它的参数计算是传动设计中的重要工作。
本文针对蜗轮蜗杆机构,给出其参数计算公式,供大家参考使用。
关键词:蜗轮;蜗杆;参数计算
1.引言
蜗轮蜗杆机构是一种经典的传动机构,它由蜗杆和蜗轮组成,是机械传动中最常用的机构之一。
它具有传动精度高,传动比容易调节,适应宽范围,工作可靠,使用寿命长等优点,因此得到了广泛的应用。
2.蜗轮蜗杆参数计算
(1)计算内径:
内径rn=Mz/π
其中Mz为蜗杆节距。
(2)计算外径:
外径r0=Mz/π+2H
其中H为蜗杆的系数高度。
(3)计算周长:
周长s=2π[(Mz+2H)/π]
(4)计算节距:
节距Mz=zp[π(r0-rn)]
其中zp为蜗轮的齿数。
- 1 -。
蜗轮蜗杆的计算公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]蜗轮、蜗杆的计算公式:1,传动比=蜗轮齿数÷蜗杆头数2,中心距=(蜗轮节径+蜗杆节径)÷2 3,蜗轮吼径=(齿数+2)×模数 4,蜗轮节径=模数×齿数5,蜗杆节径=蜗杆外径-2×模数 6,蜗杆导程=π×模数×头数7,螺旋角(导程角)tg β=(模数×头数)÷蜗杆节径 一.基本参数:(1)模数m 和压力角α:在中间平面中,为保证蜗杆蜗轮传动的正确啮合,蜗杆的轴向模数m a1和压力角αa1应分别相等于蜗轮的法面模数m t2和压力角αt2,即 m a1=m t2=m αa1=αt2蜗杆轴向压力角与法向压力角的关系为: tgαa =tgαn /cosγ 式中:γ-导程角。
(2)蜗杆的分度圆直径d 1和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q ,即: q=d1/m常用的标准模数m 和蜗杆分度圆直径d1及直径系数q ,见匹配表。
(3)蜗杆头数z 1和蜗轮齿数z 2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐 z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显着减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
蜗轮、蜗杆的计算公式: 1,传动比=蜗轮齿数÷蜗杆头数 2,中心距=(蜗轮节径+蜗杆节径)÷2 3,蜗轮吼径=(齿数+2)×模数 4,蜗轮节径=模数×齿数 5,蜗杆节径=蜗杆外径-2×模数 6,蜗杆导程=π×模数×头数7,螺旋角(导程角)tg β=(模数×头数)÷蜗杆节径 一.基本参数:(1)模数m 和压力角α:在中间平面中,为保证蜗杆蜗轮传动的正确啮合,蜗杆的轴向模数m a1和压力角αa1应分别相等于蜗轮的法面模数m t2和压力角αt2,即 m a1=m t2=m αa1=αt2蜗杆轴向压力角与法向压力角的关系为: tgαa =tgαn /cosγ 式中:γ-导程角。
(2)蜗杆的分度圆直径d 1和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q,即:q=d1/m常用的标准模数m和蜗杆分度圆直径d1及直径系数q,见匹配表。
(3)蜗杆头数z1和蜗轮齿数z2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐 z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显着减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
另一方面z2也不能过多,当z2>80时(对于动力传动),蜗轮直径将增大过多,在结构上相应就须增大蜗杆两支承点间的跨距,影响蜗杆轴的刚度和啮合精度;对一定直径的蜗轮,如z2取得过多,模数m 就减小甚多,将影响轮齿的弯曲强度;故对于动力传动,常用的范围为z2≈28-70。
蜗轮、蜗杆的计算公式:1,传动比二蜗轮齿数一蜗杆头数2,中心距二(蜗轮节径+蜗杆节径)=23,蜗轮吼径二(齿数+2) X模数4,蜗轮节径二模数X齿数5,蜗杆节径二蜗杆外径-2X模数6,蜗杆导程二开X模数X头数7,螺旋角(导程角)tgB二(模数X头数)十蜗杆节径一.基本参数:(1)模数m和压力角« :在中间平面中,为保证蜗杆蜗轮传动的正确啮合,蜗杆的轴向模数皿和压力角a “应分别相等于蜗轮的法面模数叱和压力角a t:,即nu:二nupm Q ai— ° t:蜗杆轴向压力角与法向压力角的关系为:tg a 尸tg a n/cos 丫式中:丫-导程角。
(2)蜗杆的分度圆直径di和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀來加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径",而把及分度圆直径和模数的比称为蜗杆直径系数q,即:q=dl/m常用的标准模数m和蜗杆分度圆直径dl及直径系数q,见匹配表。
(3)蜗杆头数N和蜗轮齿数比蜗杆头数可根据要求的传动比和效率来选择,一般取zl = l-10,推荐zl=1, 2, 4, 6o选择的原则是:当要求传动比较大,或要求传递大的转矩时,则zl取小值;要求传动自锁时取zl = l:要求具有高的传动效率,或高速传动时,则zl取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min^l7,但z2<26时,啮合区显着减小, 影响平稳性,而在z2N30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28o另一方面z2也不能过多,当z2>80时(对于动力传动),蜗轮直径将增大过多,在结构上相应就须增大蜗杆两支承点间的跨距,影响蜗杆轴的刚度和啮合精度;对一定直径的蜗轮,如z2取得过多,模数m 就减小我多,将影响轮齿的弯曲强度;故对于动力传动,常用的范围为z2~28-70。
蜗轮蜗杆的计算(总4页) -CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除蜗轮、蜗杆的计算公式:1,传动比=蜗轮齿数÷蜗杆头数2,中心距=(蜗轮节径+蜗杆节径)÷2 3,蜗轮吼径=(齿数+2)×模数 4,蜗轮节径=模数×齿数5,蜗杆节径=蜗杆外径-2×模数 6,蜗杆导程=π×模数×头数7,螺旋角(导程角)tg β=(模数×头数)÷蜗杆节径 一.基本参数:(1)模数m 和压力角α:在中间平面中,为保证蜗杆蜗轮传动的正确啮合,蜗杆的轴向模数m a1和压力角αa1应分别相等于蜗轮的法面模数m t2和压力角αt2,即 m a1=m t2=m αa1=αt2蜗杆轴向压力角与法向压力角的关系为: tgαa =tgαn /cosγ 式中:γ-导程角。
(2)蜗杆的分度圆直径d 1和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q ,即: q=d1/m常用的标准模数m 和蜗杆分度圆直径d1及直径系数q ,见匹配表。
(3)蜗杆头数z 1和蜗轮齿数z 2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐 z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显着减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
蜗轮蜗杆参数计算公式
1、蜗轮蜗杆组合传动具有较高的传动比,可以较容易地达到比较小的大小及较高的速比,并且一般的传动比更高的机构与所需的齿形和齿形尺寸都较小,而且可以具有更高的效率。
2、由于蜗轮之间的位置及角度的变化可以改变传动比,因而非常适合用于变比传动机构,同时由于蜗轮蜗杆机构的结构较简单,其装配和维护也比较容易。
3、蜗轮蜗杆组合传动在拧紧螺钉时可以产生一定的高度,因而不需要设计及购买较多的辅助部件即可完成较高的传动比及较高的
精确度。
二、蜗轮蜗杆参数计算公式:
蜗轮蜗杆传动比N=m1/m2
其中m1代表蜗轮齿数,m2代表蜗杆齿数。
设计蜗轮蜗杆时,要考虑传动比和两轮基圆d1和d2之间的关系: d1/d2 = ( m2+2 )/m1
其中,d1代表蜗轮基圆的直径,d2代表蜗杆基圆的直径。
计算蜗轮蜗杆齿数:
m1 = ( m2+2 ) / (d1/d2)
m2 = (d1/d2) * (m1-2)
其中,m1代表蜗轮齿数,m2代表蜗杆齿数,d1代表蜗轮基圆的直径,d2代表蜗杆基圆的直径。
- 1 -。
蜗轮、蜗杆的计算公式:1,传动比=蜗轮齿数÷蜗杆头数2,中心距=(蜗轮节径+蜗杆节径)÷23,蜗轮吼径=(齿数+2)×模数4,蜗轮节径=模数×齿数5,蜗杆节径=蜗杆外径-2×模数6,蜗杆导程=π×模数×头数7,螺旋角(导程角)tgβ=(模数×头数)÷蜗杆节径一.基本参数:(1)模数m和压力角α:在中间平面中,为保证蜗杆蜗轮传动的正确啮合,蜗杆的轴向模数m a1和压力角αa1应分别相等于蜗轮的法面模数m t2和压力角αt2,即m a1=m t2=mαa1=αt2蜗杆轴向压力角与法向压力角的关系为:tgαa=tgαn/cosγ式中:γ-导程角。
(2)蜗杆的分度圆直径d1和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q,即:q=d1/m常用的标准模数m和蜗杆分度圆直径d1及直径系数q,见匹配表。
(3)蜗杆头数z1和蜗轮齿数z2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显著减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
另一方面z2也不能过多,当z2>80时(对于动力传动),蜗轮直径将增大过多,在结构上相应就须增大蜗杆两支承点间的跨距,影响蜗杆轴的刚度和啮合精度;对一定直径的蜗轮,如z2取得过多,模数m就减小甚多,将影响轮齿的弯曲强度;故对于动力传动,常用的范围为z2≈28-70。
蜗杆参数计算公式,很多⼈都在找蜗轮和蜗杆通常⽤于垂直交叉的两轴之间的传动。
蜗轮和蜗杆的齿向是螺旋形的,蜗轮的轮齿顶⾯常制成环⾯。
在蜗轮蜗杆传动中,蜗杆是主动件,蜗轮是从动件。
蜗杆轴向剖⾯类是梯形螺纹的轴向剖⾯,有单头和多头之分。
若为单头,则蜗杆转⼀圈蜗轮只转⼀个齿,因此可以得到较⾼速⽐。
今天介绍⼀下蜗杆参数计算公式。
加⼯导程=6.3×3.1416=19.79mm 模数*派蜗轮、蜗杆的计算公式:1、传动⽐=蜗轮齿数÷蜗杆头数2、中⼼距=(蜗轮节径+蜗杆节径)÷23、蜗轮吼径=(齿数+2)×模数4、蜗轮节径=模数×齿数5、蜗杆节径=蜗杆外径-2×模数6、蜗杆导程=π×模数×头数7、螺旋⾓(导程⾓)tgB=(模数×头数)÷蜗杆节径蜗杆导程=π×模数×头数模数=分度圆直径/齿数头数是说螺杆上螺旋线的条数;模数是指螺杆上螺旋线的⼤⼩,也就是模数越⼤螺杆上的螺旋线就越“柱装”(东北话,就是⽐较⼤,⽐较结实)直径系数是指螺杆的粗细。
模数:齿轮的分度圆是设计、计算齿轮各部分尺⼨的基准,⽽齿轮分度圆的周长=πd=z p,于是得分度圆的直径d=z p/π由于在上式中π为⼀⽆理数,不便于作为基准的分度圆的定位。
为了便于计算,制造和检验,现将⽐值p/π⼈为地规定为⼀些简单的数值,并把这个⽐值叫做模数(module),以m表⽰。
模数m是决定齿轮尺⼨的⼀个基本参数。
齿数相同的齿轮模数⼤,则其尺⼨也⼤。
为了便于制造,检验和互换使⽤,齿轮的模数值已经标准化了。
建筑模数建筑模数指建筑设计中选定的标准尺⼨单位。
它是建筑设计、建筑施⼯、建筑材料与制品、建筑设备、建筑组合件等各部门进⾏尺度协调的基础。
就象随便来个尺⼨,建筑构件就⽆法标准化了,难统⼀。
基本模数的数值规定为100mm,以M表⽰,即1M= 100mm。
导出模数分为扩⼤模数和分模数,扩⼤模数的基数为3M,6M,12M,15M,30M,60M共6个;分模数的基数为1/10M,1/5M,1/2M共3个。
蜗轮、蜗杆的计算公式:1,传动比=蜗轮齿数÷蜗杆头数2,中心距=(蜗轮节径+蜗杆节径)÷ 2 3,蜗轮吼径=(齿数+2)×模数4,蜗轮节径=模数×齿数5,蜗杆节径=蜗杆外径-2×模数6,蜗杆导程=π×模数×头数为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q,即:q=d1/m常用的标准模数m和蜗杆分度圆直径d1及直径系数q,见匹配表。
(3)蜗杆头数z1和蜗轮齿数z2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显着减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
另一方面z2也不能过多,当z2>80时(对于动力传动),蜗轮直径将增大过多,在结构上相应就须增大蜗杆两支承点间的跨距,影响蜗杆轴的刚度和啮合精度;对一定直径的蜗轮,如z2取得过多,模数m就减小甚多,将影响轮齿的弯曲强度;故对于动i=n1/n2=z2/z1 =u式中:n1 -蜗杆转速;n2-蜗轮转速。
减速运动的动力蜗杆传动,通常取5≤u≤70,优先采用15≤u≤50;增速传动5≤u≤15。
普通圆柱蜗杆基本尺寸和参数及其与蜗轮参数的匹配表。
2 蜗杆传动变位的特点蜗杆传动变位变位蜗杆传动根据使用场合的不同,可在下述两种变位方式中选取一种。
1)变位前后,蜗轮的齿数不变(z2 '=z2),蜗杆传动的中心距改变(a '≠a),如图9-8a、c所示,其中心距的计算式如下:a '=a+x2m=(d1+d2+2x2m)/22)变位前后,蜗杆传动的中心距不变(a '=a),蜗轮齿数发生变化(z2'≠z2),如图9-8d、e所示,z2' 计算如下:因a'=a则z2' =z2-2x2蜗杆传动变位:3 普通圆柱蜗杆传动的几何尺寸计算普通圆柱蜗杆传动基本几何尺寸计算关系式:。
蜗杆参数计算公式,绝对用得上。
加工导程=6.3×3.1416=19.79mm 模数*派
蜗轮、蜗杆的计算公式:
1,传动比=蜗轮齿数÷蜗杆头数
2,中心距=(蜗轮节径+蜗杆节径)÷2
3,蜗轮吼径=(齿数+2)×模数
4,蜗轮节径=模数×齿数
5,蜗杆节径=蜗杆外径-2×模数
6,蜗杆导程=π×模数×头数
7,螺旋角(导程角)tgB=(模数×头数)÷蜗杆节径
蜗杆导程=π×模数×头数
模数=分度圆直径/齿数
头数是说螺杆上螺旋线的条数;
模数是指螺杆上螺旋线的大小,也就是模数越大螺杆上的螺旋线就越“柱装”(东北话,就是比较大,比较结实)
直径系数是指螺杆的粗细。
模数:齿轮的分度圆是设计、计算齿轮各部分尺寸的基准,而齿轮分度圆的周长=πd=z p,于是得分度圆的直径
d=z p/π
由于在上式中π为一无理数,不便于作为基准的分度圆的定位.为了便于计算,制造和检验,现将比值p/π人为地规定为一些简单的数值,并把这个比值叫做模数(module),以m表示,即令
其单位为mm.
于是得:
模数m是决定齿轮尺寸的一个基本参数.齿数相同的齿轮模数大,则其尺寸也大.为了便于制造,检验和互换使用,齿轮的模数值已经标准化了.
-End-
来源:网络,机械社区整理。