成形应变率的计算大全
- 格式:doc
- 大小:74.50 KB
- 文档页数:2

应变的计算方法本章介绍了几种网格应变的计算方法,通过分析网格变形的特点及规律,将网格的变形分解为分别沿两个主应变的方向一次变形而得,从而通过欧拉法推导了有限应变解析的方网格应变计算方法,并把三维空间网格的每个网格作为线性孔斯曲面介绍了三维空间网格的应变计算方法。
此外还介绍了工程应变、等效应变和厚度的计算。
4.2 基于欧拉法和有限应变理论解析的方网格计算方法根据有限应变的理论,不同的应力加载可以获得相同的应变结果。
对于近似于平面应力状态的板材成形来说,每个单元体的应变主方向(除去因为位移造成的转动)在成形过程中保持不变。
这样就可以将应变分成不同的加载阶段,利用真实应变的可叠加性,就可以推导出方网格变形的应变计算方法。
连续体的有限变形有两种表述方法。
一种方法的相对位移计算是以变形前后物体内一点作为参考点,即以变形前的坐标作为自变量,这种方法称为拉格朗日法。
另一种方法的相对位移计算是以变形后物体内一点作为参考点,以及已变形后的坐标作为自变量,这种方法称为欧拉法[48]。
这里给出基于欧拉法和有限应变理论解析的方网格计算原理。
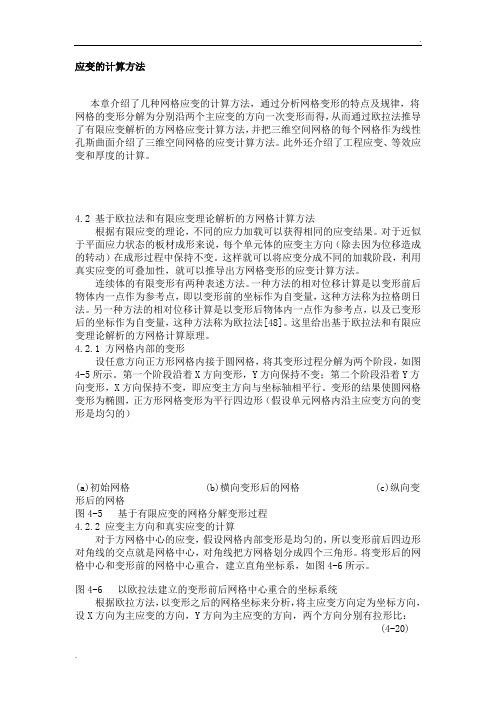
4.2.1 方网格内部的变形设任意方向正方形网格内接于圆网格,将其变形过程分解为两个阶段,如图4-5所示。
第一个阶段沿着X方向变形,Y方向保持不变;第二个阶段沿着Y方向变形,X方向保持不变,即应变主方向与坐标轴相平行。
变形的结果使圆网格变形为椭圆,正方形网格变形为平行四边形(假设单元网格内沿主应变方向的变形是均匀的)(a)初始网格 (b)横向变形后的网格 (c)纵向变形后的网格图4-5 基于有限应变的网格分解变形过程4.2.2 应变主方向和真实应变的计算对于方网格中心的应变,假设网格内部变形是均匀的,所以变形前后四边形对角线的交点就是网格中心,对角线把方网格划分成四个三角形。
将变形后的网格中心和变形前的网格中心重合,建立直角坐标系,如图4-6所示。
图4-6 以欧拉法建立的变形前后网格中心重合的坐标系统根据欧拉方法,以变形之后的网格坐标来分析,将主应变方向定为坐标方向,设X方向为主应变的方向,Y方向为主应变的方向,两个方向分别有拉形比:(4-20) 则两个方向的真实应变等于两次分别变形的叠加:(4-21)设变形前方网格边长为,为所取初始三角形的直角边长,则有:取其中初始三角形,其变形后为,根据变形后的网格点坐标、、,得到变形后三角形边长为:(4-22)沿两个主应变方向的拉形比为:(4-23)已知:(4-24)得:(4-25)由此得到根据三角形计算出来的主应变的方向,进而可以求出主应变:(4-26)根据四边形网格划分的三角形分别求出来的主应变的方向和大小,就得到了方网格中心O点的真实应变值。

应变速率张量(strain rate tensor)
由一点的九个应变速率分量所组成的矩阵,亦称应变速度张量.即
以工程应变表示的张量为
由于 故应变速率张量是一个二阶对称张量,它具有对称张量的一切性质。
应变张量⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡=zz zy zx yz yy yx xz xy xx E εεεεεεεεε中,若用速度代替位移,可由应变张量得到应变率张量,也称变形速度的张量
{}ij ε
=E 为: ⎪⎪⎭
⎫
⎝⎛∂∂+∂∂=i j j i ij x v x v 21ε 它也是一个二阶对称张量,是速度梯度张量i j v x ⎧⎫∂⎪⎪⎨⎬∂⎪⎪⎩⎭
的对称部分。
变形速度张量分量各分量的几何意义可由 ⎪⎪⎭
⎫ ⎝⎛∂∂+∂∂=i j
j i ij x v x v 21ε 的意义相应地得到。
即: 1
111x v ∂∂=ε 表示平行1x 轴的线元在单位时间内的相对收缩率。
1
221122x v x v ∂∂+∂∂=ε 表示1x 轴和2x 轴间的直角,在单位时间内的角度变化(也称此为剪切速度)。
定义矩阵中所有元素的平方和开根号为矩阵的模。

5.8.5应变计计算方法建议1) 测值的整理在计算前应对每支应变计的测值绘制过程线,对于明显的偶然误差、过失误差应予剔除或修正。
2)基准时刻和基准值的选取(1)应变计基准时刻选取的原则是,混凝土浇筑后其强度逐渐增大,到混凝土能够带动应变计变形的时刻为基准时刻,此刻的测值为基准值。
对于钢弦式仪器这个时刻大概为混凝土浇筑后48小时左右。
(2)基准时刻一般在最高温升以后,过程线比较光滑的一段内;(3)两支工作应变计和无应力计的基准值,应取同一基准时刻的测值。
如个别仪器测值在混凝土浇筑初期跳动比较大,不满足上面的条件,应作必要的修匀。
3)应变计算(1)计算综合应变在测得应变计的测值R 和混凝土温度T 后,可用下式计算其综合应变:m ε=K (R -0R )+(S α-C α)(T -0T ) (1) 式中:m ε ―混凝土总应变;R 、0R ―分别为仪器读数和基准读数(频率摸数);T 、0T ―分别为仪器温度和基准温度;K ―仪器系数;S α、C α―分别为仪器和混凝土的热膨胀系数。
由此算得的综合应变m ε中除了包含负载、温度应变外,还包含自生体积应变,应予扣除:0ε=m ε-g εg ε为混凝土自生体积应变,按(1)式计算,只是计算式中的参数和测值都是无应力计的值。
(2)计算单轴应变)(110020y x x x εεμμμεε+-++= )(110020y x y y εεμμμεε+-++=式中:μ―混凝土泊松系数。
4)应力计算混凝土是弹性徐变体,应变计测得的应变不仅与受荷大小有关,而且与应力作用的时间历程有关,所以应计算其徐变应力。
计算方法有两种:变形法和松弛法。
(1)变形法在持续不变的单位荷载作用下,混凝土的单位总变形),(τεt m 为:),(τεt m = ),()(1ττt C E +式中: τ — 加荷龄期;t — 持荷时间;),(τt C — 徐变度,是加荷龄期和持荷时间的函数;)(τE — 瞬时弹模。
应变的计算方法本章介绍了几种网格应变的计算方法,通过分析网格变形的特点及规律,将网格的变形分解为分别沿两个主应变的方向一次变形而得,从而通过欧拉法推导了有限应变解析的方网格应变计算方法,并把三维空间网格的每个网格作为线性孔斯曲面介绍了三维空间网格的应变计算方法。
此外还介绍了工程应变、等效应变和厚度的计算。
4.2 基于欧拉法和有限应变理论解析的方网格计算方法根据有限应变的理论,不同的应力加载可以获得相同的应变结果。
对于近似于平面应力状态的板材成形来说,每个单元体的应变主方向(除去因为位移造成的转动)在成形过程中保持不变。
这样就可以将应变分成不同的加载阶段,利用真实应变的可叠加性,就可以推导出方网格变形的应变计算方法。
连续体的有限变形有两种表述方法。
一种方法的相对位移计算是以变形前后物体内一点作为参考点,即以变形前的坐标作为自变量,这种方法称为拉格朗日法。
另一种方法的相对位移计算是以变形后物体内一点作为参考点,以及已变形后的坐标作为自变量,这种方法称为欧拉法[48]。
这里给出基于欧拉法和有限应变理论解析的方网格计算原理。
4.2.1 方网格内部的变形设任意方向正方形网格内接于圆网格,将其变形过程分解为两个阶段,如图4-5所示。
第一个阶段沿着X方向变形,Y方向保持不变;第二个阶段沿着Y方向变形,X方向保持不变,即应变主方向与坐标轴相平行。
变形的结果使圆网格变形为椭圆,正方形网格变形为平行四边形(假设单元网格内沿主应变方向的变形是均匀的)(a)初始网格 (b)横向变形后的网格 (c)纵向变形后的网格图4-5 基于有限应变的网格分解变形过程4.2.2 应变主方向和真实应变的计算对于方网格中心的应变,假设网格内部变形是均匀的,所以变形前后四边形对角线的交点就是网格中心,对角线把方网格划分成四个三角形。
将变形后的网格中心和变形前的网格中心重合,建立直角坐标系,如图4-6所示。
图4-6 以欧拉法建立的变形前后网格中心重合的坐标系统根据欧拉方法,以变形之后的网格坐标来分析,将主应变方向定为坐标方向,设X方向为主应变的方向,Y方向为主应变的方向,两个方向分别有拉形比:(4-20)则两个方向的真实应变等于两次分别变形的叠加:(4-21)设变形前方网格边长为,为所取初始三角形的直角边长,则有:取其中初始三角形,其变形后为,根据变形后的网格点坐标、、,得到变形后三角形边长为:(4-22)沿两个主应变方向的拉形比为:(4-23)已知:(4-24)得:(4-25)由此得到根据三角形计算出来的主应变的方向,进而可以求出主应变:(4-26)根据四边形网格划分的三角形分别求出来的主应变的方向和大小,就得到了方网格中心O点的真实应变值。

应变的计算方法本章介绍了几种网格应变的计算方法,通过分析网格变形的特点及规律,将网格的变形分解为分别沿两个主应变的方向一次变形而得,从而通过欧拉法推导了有限应变解析的方网格应变计算方法,并把三维空间网格的每个网格作为线性孔斯曲面介绍了三维空间网格的应变计算方法。
此外还介绍了工程应变、等效应变和厚度的计算。
4.2 基于欧拉法和有限应变理论解析的方网格计算方法根据有限应变的理论,不同的应力加载可以获得相同的应变结果。
对于近似于平面应力状态的板材成形来说,每个单元体的应变主方向(除去因为位移造成的转动)在成形过程中保持不变。
这样就可以将应变分成不同的加载阶段,利用真实应变的可叠加性,就可以推导出方网格变形的应变计算方法。
连续体的有限变形有两种表述方法。
一种方法的相对位移计算是以变形前后物体内一点作为参考点,即以变形前的坐标作为自变量,这种方法称为拉格朗日法。
另一种方法的相对位移计算是以变形后物体内一点作为参考点,以及已变形后的坐标作为自变量,这种方法称为欧拉法[48]。
这里给出基于欧拉法和有限应变理论解析的方网格计算原理。
4.2.1 方网格内部的变形设任意方向正方形网格内接于圆网格,将其变形过程分解为两个阶段,如图4-5所示。
第一个阶段沿着X方向变形,Y方向保持不变;第二个阶段沿着Y方向变形,X方向保持不变,即应变主方向与坐标轴相平行。
变形的结果使圆网格变形为椭圆,正方形网格变形为平行四边形(假设单元网格内沿主应变方向的变形是均匀的)(a)初始网格 (b)横向变形后的网格 (c)纵向变形后的网格图4-5 基于有限应变的网格分解变形过程4.2.2 应变主方向和真实应变的计算对于方网格中心的应变,假设网格内部变形是均匀的,所以变形前后四边形对角线的交点就是网格中心,对角线把方网格划分成四个三角形。
将变形后的网格中心和变形前的网格中心重合,建立直角坐标系,如图4-6所示。
图4-6 以欧拉法建立的变形前后网格中心重合的坐标系统根据欧拉方法,以变形之后的网格坐标来分析,将主应变方向定为坐标方向,设X方向为主应变的方向,Y方向为主应变的方向,两个方向分别有拉形比:(4-20) 则两个方向的真实应变等于两次分别变形的叠加:(4-21)设变形前方网格边长为,为所取初始三角形的直角边长,则有:取其中初始三角形,其变形后为,根据变形后的网格点坐标、、,得到变形后三角形边长为:(4-22)沿两个主应变方向的拉形比为:(4-23)已知:(4-24)得:(4-25)由此得到根据三角形计算出来的主应变的方向,进而可以求出主应变:(4-26)根据四边形网格划分的三角形分别求出来的主应变的方向和大小,就得到了方网格中心O点的真实应变值。

应变的计算方法本章介绍了几种网格应变的计算方法,通过分析网格变形的特点及规律,将网格的变形分解为分别沿两个主应变的方向一次变形而得,从而通过欧拉法推导了有限应变解析的方网格应变计算方法,并把三维空间网格的每个网格作为线性孔斯曲面介绍了三维空间网格的应变计算方法。
此外还介绍了工程应变、等效应变和厚度的计算。
4.2 基于欧拉法和有限应变理论解析的方网格计算方法根据有限应变的理论,不同的应力加载可以获得相同的应变结果。
对于近似于平面应力状态的板材成形来说,每个单元体的应变主方向(除去因为位移造成的转动)在成形过程中保持不变。
这样就可以将应变分成不同的加载阶段,利用真实应变的可叠加性,就可以推导出方网格变形的应变计算方法。
连续体的有限变形有两种表述方法。
一种方法的相对位移计算是以变形前后物体内一点作为参考点,即以变形前的坐标作为自变量,这种方法称为拉格朗日法。
另一种方法的相对位移计算是以变形后物体内一点作为参考点,以及已变形后的坐标作为自变量,这种方法称为欧拉法[48]。
这里给出基于欧拉法和有限应变理论解析的方网格计算原理。
4.2.1 方网格内部的变形设任意方向正方形网格内接于圆网格,将其变形过程分解为两个阶段,如图4-5所示。
第一个阶段沿着X方向变形,Y方向保持不变;第二个阶段沿着Y方向变形,X方向保持不变,即应变主方向与坐标轴相平行。
变形的结果使圆网格变形为椭圆,正方形网格变形为平行四边形(假设单元网格内沿主应变方向的变形是均匀的)(a)初始网格 (b)横向变形后的网格 (c)纵向变形后的网格图4-5 基于有限应变的网格分解变形过程4.2.2 应变主方向和真实应变的计算对于方网格中心的应变,假设网格内部变形是均匀的,所以变形前后四边形对角线的交点就是网格中心,对角线把方网格划分成四个三角形。
将变形后的网格中心和变形前的网格中心重合,建立直角坐标系,如图4-6所示。
图4-6 以欧拉法建立的变形前后网格中心重合的坐标系统根据欧拉方法,以变形之后的网格坐标来分析,将主应变方向定为坐标方向,设X方向为主应变的方向,Y方向为主应变的方向,两个方向分别有拉形比:(4-20)则两个方向的真实应变等于两次分别变形的叠加:(4-21)设变形前方网格边长为,为所取初始三角形的直角边长,则有:取其中初始三角形,其变形后为,根据变形后的网格点坐标、、,得到变形后三角形边长为:(4-22)沿两个主应变方向的拉形比为:(4-23)已知:(4-24)得:(4-25)由此得到根据三角形计算出来的主应变的方向,进而可以求出主应变:(4-26)根据四边形网格划分的三角形分别求出来的主应变的方向和大小,就得到了方网格中心O点的真实应变值。
应变与频率计算公式
ε=k×△F
△F=F-F0
式中:ε—表面应变计的测量值,单位为10-6;
k—表面应变计的测量灵敏度,单位为10-6/F;
△F—表面应变计实时测量值相对于基准值的变化量,单位为F;
F0—表面应变计的基准值,单位为F。
b)当表面应变计不受外力作用时(仪器两端标距不变),而温度增加△T时,表面应变计
有输出量△F,这个输出量是由温度变化而造成的,因此在计算时应给以扣除。
实验可知△F与△T具有如下线性关系:ε=k×△F+b×△T=0
k△F=-b×△T
△T=T-T0
式中:b—表面应变计的温度修正系数,单位为10-6/℃;
△T—温度实时测量值相对于基准值的变化量,单位为℃;
T—温度的实时测量值,单位为℃;
T0—温度的基准值,单位为℃。
c)布设在混凝土结构物或其它结构物表面的表面应变计,受到的是变形和温度的双重作
用,此时的温度修正系数为表面应变计的温度修正系数与结构物的线膨胀系数之差,因此表面应变计一般计算公式为:。
一、管子弯曲应变率(取较大值):
应变率(%)=R
D 50 应变率(%)=(1
21T T T -)×100 二、以板成形的圆筒、锥体或管子:
应变率(%)=Rf
T 50 三、以板成形的凸形封头、折边等双向变形的元件: 应变率(%)=Rf
T 75 四、管子扩口、缩口或延伸、鐓粗,取下列绝对值的最大值:
1)环向应变
应变率(%)=(D
De D -)×100 2)轴向应变 应变率(%)=(
L Le L -)×100 3)径向应变
应变率(%)=(1
21T T T -)×100
式中:
D -管子外径(mm )
R -管子轴线弯曲半径(mm )
T -板材名义厚度(mm )
T1-管子壁初始平均厚度(mm )
T2-成形后管子壁最小厚度(mm )
De -成形圆筒或管子的外径(mm )
R f -成形后板厚度中心位置最小曲率半径(mm )
L -管子变形区初始长度(mm )
Le -成形后管子变形区的长度(mm )。