模块一 电力拖动动力学
- 格式:doc
- 大小:234.50 KB
- 文档页数:9


电力拖动系统的动力学基础引言电力拖动系统是一种将电能转化为机械能的系统,广泛应用于各种工业和交通领域。
研究电力拖动系统的动力学基础是理解其工作原理和性能的关键。
本文将介绍电力拖动系统的动力学基础,包括动力学方程、系统稳定性和控制方法等方面的内容。
动力学方程电力拖动系统的动力学方程描述了系统的运动规律。
一般而言,电力拖动系统可以分为两个部分:电动机和负载。
电动机负责产生力和扭矩,将电能转化为机械能;负载则承受电动机输出的力和扭矩。
动力学方程可以用以下方式表示:\\(J\\frac{{d\\omega}}{{dt}} = T_m - T_l - B\\omega\\)其中,\(J\)是系统的转动惯量,\(\omega\)是系统的角速度,\(T_m\)是电动机输出的扭矩,\(T_l\)是负载承受的扭矩,\(B\)是摩擦系数。
动力学方程描述了系统内部各个力和扭矩之间的平衡关系。
当电动机输出的扭矩大于负载承受的扭矩时,系统可以加速。
反之,当负载承受的扭矩大于电动机输出的扭矩时,系统会减速。
系统稳定性电力拖动系统的稳定性是评估系统性能的关键指标之一。
系统稳定性主要取决于电动机的控制方式和系统参数的选取。
闭环控制闭环控制是常用的电力拖动系统控制方式之一。
闭环控制通过不断检测系统的实际输出,与期望输出进行比较,然后调整电动机的输入信号,使得系统能够迅速响应和稳定工作。
闭环控制的动力学方程可以表示为:\\(T_m = K_p(\\omega_r - \\omega) + K_i\\int(\\omega_r - \\omega)dt + K_d\\frac{{d(\\omega_r - \\omega)}}{{dt}}\\)其中,\(T_m\)是电动机输出的扭矩,\(\omega_r\)是期望的角速度,\(\omega\)是实际的角速度,\(K_p\)、\(K_i\)和\(K_d\)是比例、积分和微分增益。
闭环控制能够提高系统的稳定性和响应速度,使得系统能够更好地适应外部负载变化。
第2章 电力拖动基础的动力学工业生产中最典型的电力拖动系统有电力机车、起重机、龙门刨床等。
由于实际电力拖动系统种类太多,不可能逐一进行研究,所以要找到它们共同的运动规律加以综合分析。
电力拖动系统的运动规律可以用动力学中的运动方程来描述。
为了抓住本质,本章首先分析简单的单轴电力拖动系统动力学行为,然后分析多轴系统的折算问题,典型的负载转矩性质,最后电力拖动系统的平衡稳定运转问题。
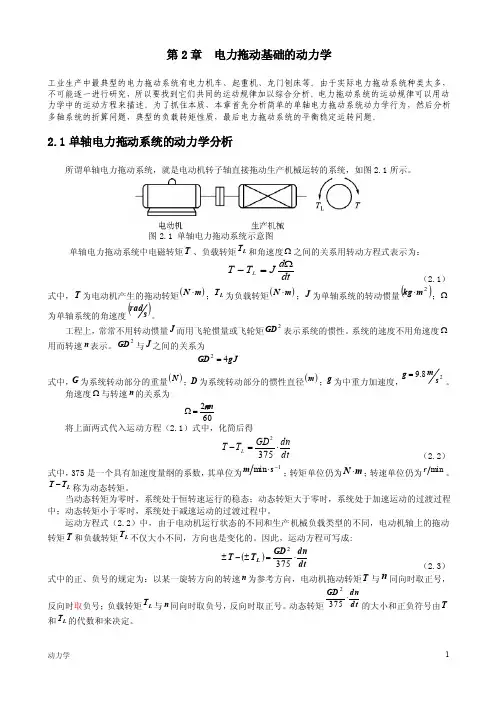
2.1单轴电力拖动系统的动力学分析所谓单轴电力拖动系统,就是电动机转子轴直接拖动生产机械运转的系统,如图2.1所示。
图2.1 单轴电力拖动系统示意图单轴电力拖动系统中电磁转矩T 、负载转矩L T 和角速度Ω之间的关系用转动方程式表示为:dt d JT T L Ω=- (2.1)式中,T 为电动机产生的拖动转矩()m N ⋅;L T 为负载转矩()m N ⋅;J 为单轴系统的转动惯量()2m kg ⋅;Ω为单轴系统的角速度()s rad。
工程上,常常不用转动惯量J 而用飞轮惯量或飞轮矩2GD 表示系统的惯性。
系统的速度不用角速度Ω用而转速n 表示。
2GD 与J 之间的关系为gJ GD 42=式中,G 为系统转动部分的重量()N ;D 为系统转动部分的惯性直径()m ;g 为中重力加速度,28.9s mg =。
角速度Ω与转速n 的关系为602nπ=Ω 将上面两式代入运动方程(2.1)式中,化简后得dt dnGD T T L ⋅=-3752 (2.2) 式中,375是一个具有加速度量纲的系数,其单位为1m in -⋅s m ;转矩单位仍为m N ⋅;转速单位仍为min r 。
L T T -称为动态转矩。
当动态转矩为零时,系统处于恒转速运行的稳态;动态转矩大于零时,系统处于加速运动的过渡过程中;动态转矩小于零时,系统处于减速运动的过渡过程中。
运动方程式(2.2)中,由于电动机运行状态的不同和生产机械负载类型的不同,电动机轴上的拖动转矩T 和负载转矩L T 不仅大小不同,方向也是变化的。
模块一 电力拖动动力学任务一 拖动系统的转矩及运动基本方程式任务描述(该任务的应用意义)“拖动”是应用各种原动机使生产机械产生运动,来完成一定的生产任务。
用电动机作为原动机来拖动生产机械的拖动方式,称为“电力拖动”。
研究分析电力拖动系统中转速、转矩、功率之间的关系对安全、可靠、合理利用电动机具有关键意义。
任务分析(该任务要解决什么问题)电力拖动系统是一个统一的动力学系统。
系统的运动方程式,由电动机产生的电磁转矩与生产机械负载转矩之间的关系决定。
要研究电力拖动系统,就必须分析电动机与负载 之间的关系。
从动力学的角度来看,它们服从动力学统一的规律。
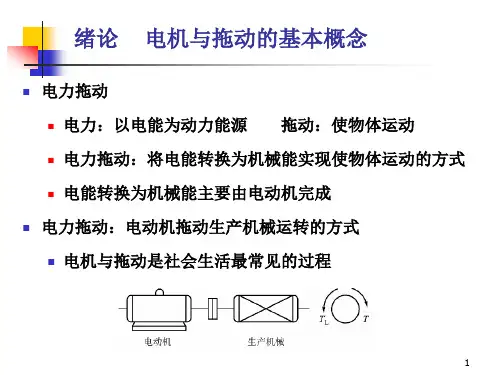
相关知识(体现知识内容)一、电力拖动装置的组成典型的电力拖动系统是由电动机、工作机构、控制设备及电源四部分组成,如图1—1所示。
电动机将电网的电能变为机械能,用以拖动生产机械。
工作机构是生产机械为执行某一任务的机械部分。
控制设备是为实现电动机的各种运行要求而使用的各种控制电机、电器等。
电源是向电动机及电气控制设备供电的部分。
通常,电动机与生产机械的工作机构并不同轴,它们之间还有传动机构,把电动机的运动,经过中间变速或变换运动方式后,再传给生产机械的工作机构。
二、电力拖动系统的转矩在电力拖动系统的工作过程中,存在三种转矩:1.拖动转矩——电动机轴上输出的转矩,在一般工程计算中,可认为等于电动机产生知识点及目标(说明该模块的知识要点)电力拖动系统是一个转动系统,其转动规律用服从动力学统一的规律,即运动方程式。
应掌握运动方程式的基本物理含义和用途。
能力点及目标(说明该模块的能力要点)要能够运用运动方程式进行拖动系统的定性分析和定量分析,能将实际的拖动系统简化为单轴系统用运动方程式进行性能分析。
的电磁转矩。
2.阻转矩——生产机械的负载转矩,在通常情况下阻碍拖动系统的转动。
3.动态转矩——电机转速发生变化时,因为电机转子和被它拖动的生产机械具有惯性 而产生的一个惯性转矩。
三、运动方程式在直线运动系统中,当外力推动物体向前运动时,外力克服物体所产生的摩擦阻力使物体产生加速度运动,其运动规律为牛顿第二定律,即ma F F L =-同理,在旋转的拖动系统中,当电动机以恒定的转速拖动工作机构稳定运行时,电动机产生的拖动转矩应克服系统的负载转矩。
如果要使工作机构变速运行,电动机产生的拖动转矩除克服负载转矩外,还应克服由于运动部分的惯性所引起的动态转矩。
按照动力学平衡的观点,即牛顿第二定律,其运动方程式为dtd J M M L Ω=- (1—1) 式中 M ——电动机产生的拖动转矩,N ·m ;M L ——负载转矩,N ·m ;dtd J Ω——惯性转矩,N ·m ; J ——转动惯量,kg ·m 2;Ω——电机轴旋转角速度,rad /s 。
转动惯量了是物理学中使用的参数,在实际的工程应用中则采用飞轮惯量GD 2来反映转动物体的惯性大小,其单位是N ·m 2。
两者的关系为g GD D g G m J 4)2(222===ρ (1—2) 式中 m 与G ——转动部分的质量与重力,单位分别为kg 与N ;ρ与D ——质量m 的转动半径与直径,m ;g ——重力加速度,m /s 2。
通常电动机的转速用每分钟的转数n 表示,而不用角速度Ω。
602n π=Ω (1—3) 将式(1—2)、式(1—3)代入式(1—1),得到运动方程式的实用形式为dtdn GD M M L 3752=- (1—4) 式中,换算常数375具有加速度的量纲。
应当注意,GD 2是代表物体旋转惯性的一个整体物理量,不能分开。
电动机电枢(或转 子)及其他转动部件的GD 2可由产品样本和有关设计资料中查到,但其单位用kg ·m 2表示。
为了化成国际单位,将查到的数据乘以9.81则换算成N ·m 2。
电动机的工作状态可由运动方程式表示出来,分别由式(1—4)可知:1)当M>M L 时,0>dtdn ,电力拖动系统处于加速状态; 2)当M<M L 时,0<dt dn ,电力拖动系统处于减速状态; 在上述两种情况下,拖动系统处于变速过程,称为动态。
3)当M=M L 时,0=dtdn ,则n =0或n =常数,拖动系统静止或以恒定的转速运行,称为稳定运行状态,也称静态。
四、运动方程式中转矩正负号的分析应用运动方程式,通常以电动机轴为研究对象。
由于电动机运行状态不同,以及生产机械负载类型不同,作用在电动机轴上的电磁转矩M 及阻转矩M L 不仅大小在变化,方向也是变化的。
因此转矩M 与M L 都有正负之分,运动方程式可写成dtdn GD M M L 3752=±-±)( (1—5) 在应用运动方程式时,必须注意转矩的正负号,规定如下:1.先规定某一旋转方向(如顺时针方向)为规定正方向,则另一旋转方向(如逆时针方向)为负方向。
2.电磁转矩M 的方向与规定的旋转正方向一致时,M 为正,如图l —2(a)所示。
相反时,M 为负,如图1—2(b)所示。
3.阻转矩M L 的方向如与规定正方向相同时为负,如图1—2(c)所示。
相反时为正,如图1—2(d)所示。
4.动态转矩dtdn GD 3752的大小及正负号,则由M 与M L 的代数和来决定。
能力体现(体现能力内容)一、利用运动方程式进行运动状态的分析拖动系统的工作状态可由运动方程式进行分析,由式(1—4)可知:1.当M>M L 时,0>dtdn ,电力拖动系统处于加速状态; 2.当M<M L 时,0<dt dn ,电力拖动系统处于减速状态; 在上述两种情况下,拖动系统处于变速过程,称为动态。
3.当M=M L 时,0=dtdn ,则n =0或n =常数,拖动系统静止或以恒定的转速运行,称为稳定运行状态,也称静态。
二、利用运动方程式进行定量计算例如,对一个斜井提升系统,在系统设备一定(GD 2一定)和负载一定(M L 一定)的情况下,根据运动方程式dtdn GD M M L 3752=- 可知:对提出的一定加速度或减速度要求,可计算出所需的电磁转矩M ,M 为机械特性曲线上的平均加速或减速转矩。
根据M 大小确定上下切换转矩M 1、M 2,并确定加速或减速的技术措施(如转子串电阻),进而计算转子电阻的大小,实现所需要的加速或减速要求。
任务二 电力拖动系统转矩的折算任务描述(该任务的应用意义)一个实际拖动系统往往都具有减速传动机构,是一个多轴系统。
对每根轴上转矩、转速、功率的分析计算会使我们将更多的精力用到非电气的机械计算上。
为简化机械计算,将整个传动机构与负载看成是一个整体负载由电动机带动,则可将重点放在电动机转轴的转矩、转速、功率的分析计算上。
任务分析(该任务要解决什么问题)在将多轴系统简化为单轴系统时,要解决不同转速下转矩大小的折算问题,即在传递功率相同时,将低速下负载转矩折算到高速的电动机轴上时,其转矩应减小;将低速负载和传动机构的惯性折算到高速电动机轴上时,其反映惯性大小的参数值也应减小。
此外,反映负载大小的有转动的转矩大小和直线运动的作用力大小;反映惯性大小的有转动的飞轮惯量和直线运动的质量。
相关知识(体现知识内容)电力拖动系统中,电动机和工作机构不一定直接相联,往往装有若干传动齿轮或其他传动机械,形成多轴系统,如图1—3(a)所示。
经过传动装置的变速后,各根传动轴上的转速都不一样,因而各轴上的转矩也不一样。
研究这个系统,需要对每根轴分别列出相应的运动方程式,然后联立求解,显然这是很麻烦的。
研究电力拖动系统,通常只需要研究电动机轴的运转规律,并不需要研究每根轴的问题。
为简化运算,可采用等值折算的方法,把工作机构实际负担的转矩折算成电动机轴需要付出的转矩。
这样就将多轴系统折算成为等效的单轴系统,如图1—3(b)所示。
为了保证折算后的分析计算符合折算前的实际拖动系统,要求折算的原则是:保持拖动系统在折算前后其传送的功率和储存的动能不变。
折算的目标是将所有参数均折算到电动机的转轴上,以电动机轴为研究对象。
需要折算的参数有:工作机构的负载转矩M L ’,系统中各轴(除电动机轴外)的转动惯量J 1、J 2……J L 。
知识点及目标将一个实际的多轴拖动系统简化为单轴系统时,必须要保证简化后的系统运动性能与简化前的系统相同,简化后的分析才有实际意义。
能力点及目标要能够正确运用折算公式去将实际拖动系统的转矩大小和惯性大小进行折算。
对于某些做直线运动的工作机构,还必须把进行直线运动的质量m 及运动所需克服的阻力F L 折算到电动机轴上去。
一、工作机构负载转矩的折算如图l —3(b)所示,用电动机轴上的负载转矩M L 来反映工作机构轴上的负载转矩M L ’。
折算前,工作机构的功率为L L L M P Ω='' (1—6)折算到电动机轴上的功率为Ω=L L M P (1—7)式中 M L ——折算到电动机轴上的等效负载转矩;Ω——电动机转子的角速度。
根据折算前后功率不变的原则,应有下列关系;L L L M M Ω=Ω'j M M M L L LL 1''=ΩΩ= (1—8) 式中LL n n j =ΩΩ= 为电动机轴与工作机构轴的转速比。
上式说明,在工作机构的低速轴上,转矩M L ’较大,而折算到高速的电动机轴上时,其等效的转矩M L 就减小了。
实际上在传动过程中,传动机构还存在着功率损耗,此损耗称为传动损耗,可用传动效率ηG 表示。
1.电动机工作在电动状态时,由电动机带动工作机构,传动损耗应由电动机承担,电动 机输出的功率比生产机械消耗的功率大,这时的功率关系为G LL L M M η1'Ω=Ω G L L j M M η1'= (1—9)2.电动机工作在制动状态时,由工作机构带动电动机,传动损耗就由工作机构承担,传送到电动机轴上的功率比工作机构轴上的功率小。
这时的功率关系是G L L L M M ηΩ=Ω'G L L jM M η1'= (1—10) 如传动机构采用多级变速,则总的转速比j 为各级转速比之积,即21j j j = (1—11)一般设备上,电动机在高转速运行,而工作机械在低转速运行,故j >>1。
在多级传动中,传动的总效率ηG 为各级传动效率η1、η2……之积,即21ηηη=G(1—12)不同种类的传动机构,每级效率不同。
对于某一具体生产机械,负载大小不同时,效率也不同,一般是空载低,满载高。
粗略计算时,可以不考虑这种变化,都可以采用满载效率值来计算。
二、工作机械直线运动作用力的折算某些生产机械具有直线运动的工作机构,如矿用绞车的钢丝绳以力F L 吊质量为m L 的重物G L ,以速度v L 上升或下降,如图1—4所示。