神经网络α阶逆系统控制方法在机器人解耦控制中的应用
- 格式:pdf
- 大小:224.57 KB
- 文档页数:5
了解AI技术中的神经网络原理神经网络是人工智能(AI)领域中的一种重要技术,它模拟了生物神经系统的运作方式。
在现代社会中,神经网络已经广泛应用于图像识别、语音识别、自然语言处理等领域,并取得了令人瞩目的成果。
本文将为您介绍AI技术中的神经网络原理,帮助您深入了解这一技术的工作原理和应用。
一、神经元和激活函数1. 神经元神经元是构成神经网络的基本单元。
它接收输入信号,并通过加权和偏置进行线性计算,然后使用激活函数对结果进行非线性转换。
其中,加权值决定了不同输入信号对输出结果的影响程度,而偏置则调节整个模型的灵敏度。
2. 激活函数激活函数是一个数学函数,可以将神经元输出限制在一定范围内。
常用的激活函数有sigmoid函数、ReLU函数等。
sigmoid函数的取值范围在0到1之间,可用于二分类问题;ReLU函数在输入大于0时输出输入值,在输入小于等于0时输出0,适合处理较复杂的非线性问题。
二、前向传播和反向传播1. 前向传播前向传播是神经网络中的一种计算方式,用于将输入数据从输入层经过各个隐藏层最终传递到输出层。
在前向传播过程中,每个神经元根据连接权重和偏置值对接收到的输入信号进行计算,并将结果传递给下一层。
2. 反向传播反向传播是神经网络中的一种学习算法,用于调整连接权重和偏置值,使模型能够更好地适应训练数据。
反向传播基于误差信号从输出层往回传播,并利用梯度下降法不断调整参数值,以减小预测结果与实际结果之间的误差。
三、深度学习与卷积神经网络1. 深度学习深度学习是一种通过构建多层神经网络来解决复杂问题的机器学习方法。
相比于浅层神经网络,深度学习模型能够更好地捕捉输入数据中的抽象特征,从而提高模型的性能。
深度学习在计算机视觉、自然语言处理等领域取得了巨大成功。
2. 卷积神经网络(CNN)卷积神经网络是深度学习中的一种重要网络结构,主要用于图像处理和计算机视觉领域。
它通过卷积层、池化层和全连接层的组合构成,能够自动提取图像中的特征信息。
基于神经网络的机器人运动控制技术研究一、引言随着人工智能技术的不断发展,基于神经网络的机器人运动控制技术也逐渐成为研究的热点之一。
本文将围绕这一领域展开深入的研究,从神经网络的基本原理和机器人运动控制的核心技术入手,分析神经网络在机器人运动控制中的应用和优化方法,为相关领域的研究提供参考。
二、神经网络基本原理神经网络是一种模拟人类大脑神经元之间信息传递的系统,由于其具有自学习、自适应和非线性映射等特点,在机器学习和人工智能领域中得到广泛应用。
神经网络的核心组成部分为神经元,神经元之间的连接关系和权值则是神经网络模型的学习和决策依据。
三、机器人运动控制技术机器人运动控制技术是指通过对机器人动力学和控制系统的建模与仿真,控制机器人在特定环境下完成预定的运动任务。
机器人运动控制技术可分为两大类,一类是基于机器人动力学模型的控制方法,另一类则是基于机器人传感器和环境信息的控制方法。
四、神经网络在机器人运动控制中的应用神经网络为机器人运动控制提供了一种新的方法,通过对机器人运动状态和环境的实时感知和识别,神经网络能够自适应调节机器人的动作和姿态,从而更加精准地完成任务。
例如,在机器人行走控制中,神经网络可以对机器人的步态和姿态进行实时的感知和调整,提高机器人的稳定性和行走效率。
五、优化神经网络在机器人运动控制中的应用虽然神经网络在机器人运动控制中具有广泛的应用前景,但是神经网络的复杂性和不确定性也给其应用带来了一定的挑战。
因此,如何优化神经网络在机器人运动控制中的建模和学习成为当前研究的重点之一。
研究表明,通过对神经网络的拓扑结构、学习算法和参数优化等方面进行优化,可以有效提高神经网络在机器人运动控制中的准确性和时间效率。
六、结论机器人运动控制是机器人技术领域中的一个重要方向,而神经网络作为一种新型的控制方法则为其提供了广阔的应用前景。
在未来的发展中,应该进一步深入研究神经网络与机器人运动控制的关系,加强神经网络的建模和学习算法的优化,推动其在机器人运动控制中的进一步应用和发展。
基于HJI理论的移动机器人神经网络自适应控制移动机器人技术的发展给现代社会带来了许多便利和创新。
为了使移动机器人在各种环境中能够实现高效且安全的自主行为,控制算法的设计成为了一个重要的研究领域。
本文将介绍基于HJI(哈密顿-雅可比-伊凡斯)理论的移动机器人神经网络自适应控制算法,以提高移动机器人的自主性和适应性。
一、HJI理论简介HJI理论是一种在非线性系统控制中广泛应用的数学工具。
它基于动态规划和最优控制的思想,通过解决哈密顿-雅可比-伊凡斯偏微分方程,得到系统的最优控制输入。
应用HJI理论可以使得移动机器人在复杂和不确定的环境中做出最优的决策,从而实现精确而高效的控制。
二、移动机器人神经网络自适应控制的基本原理神经网络是一种模拟人脑神经元网络结构的数学模型。
通过对大量样本数据的学习和训练,神经网络可以实现对输入和输出之间的映射关系建模。
在移动机器人控制中,结合神经网络和HJI理论,可以实现自适应控制,使机器人能够根据环境的变化动态调整控制策略。
具体而言,移动机器人的控制器可以通过神经网络学习和适应环境中的变化。
神经网络的输入可以是机器人周围环境的传感器信息,如视觉、声音等,输出则为机器人的控制指令,如速度、方向等。
通过不断地更新神经网络的权重和偏置,使其能够根据环境反馈的信息调整控制策略,并在动态环境中实时响应。
三、基于HJI理论的移动机器人神经网络自适应控制方法1. 确定系统动态模型:首先需要根据移动机器人的物理特性和运动学方程建立系统的动态模型。
这个模型将用于计算HJI偏微分方程的解,并作为神经网络的训练样本。
2. 建立神经网络模型:在确定系统动态模型之后,可以构建适当的神经网络结构来建模控制器。
选择合适的网络拓扑和激活函数,并根据需要确定网络的层数和神经元个数。
3. 学习与适应:将机器人在真实环境中采集到的传感器数据作为神经网络的输入,并利用系统动态模型计算出的最优控制指令作为输出,进行神经网络的训练和学习。
Study on the Managing System of Fees Collecting by WaterMeter Based on CPU CardHUA Xiang-gang LIAN Xiao-gin WU Ye-lanABSTRACT:This paper introduces a managing system of fees coiiecting by water meter based on CPU card,shows the generai structure of this system,and expounds the functions of its main compositions and the concrete reaiization of these functions.KEY WORDS:CPU card;water meter;fees coiiecting system;information management system成用户卡密钥派生功能。
(4)总控卡。
总控卡密藏一个由发卡方相关人员产生的主控密钥,这个总控密钥通过和特定代码做加密运算产生水表SAM 模块,发行SAM 卡等的主工作密钥。
(5)检查卡。
主要在现场或生产过程中对水表的数据进行检查核对的卡片,为保证检查卡使用的方便性,检查卡对数据进行操作时不进行一卡一表的数据认证。
(6)生产数据设置卡。
主要在生产过程中对水表的参数进行设置。
(7)修改密钥卡。
用于将生产过程中使用的公开测试密钥更换为运行密钥。
(8)回收转移卡。
主要用于在现场进行换表操作时将旧表中的数据一次全部转移到新表中。
(9)校时卡。
主要用于在生产过程中或在现场运行状态下对水表中的时钟和日历进行调校。
(10)应急购水卡。
当水表内水量为零或透支状态时,用户可将应急购水卡中的购水量加入水表中以做应急使用。
由于CPU 卡具有大容量的优点,因此可在一张卡上开辟多个应用。
基于神经网络逆系统的车辆动力学模型解耦法
常亚妮;郭红戈;张春美
【期刊名称】《太原科技大学学报》
【年(卷),期】2024(45)2
【摘要】为了消除车辆各系统纵横向之间的耦合影响,对车辆动力学模型进行了神经网络逆系统解耦控制。
选用的研究对象为四轮驱动、前轮转向的无人驾驶车辆。
首先,将包含侧向运动和横摆运动两个自由度的车辆动力学模型通过Interactor算
法进行可逆性分析;其次,搭建卷积神经网络(Convolutional Neural
Networks,CNN)和长短期记忆神经网络(Long Short-Term Memory,LSTM)逆系
统结构构建逆系统,并验证该方法的可行性;将该解耦方法应用于无人驾驶车辆的轨
迹跟踪控制设计中,通过CarSim和Matlab/Simulink联合仿真试验证明,设计的CNN+LSTM神经网络逆系统解耦控制在多种工况下都具较好的跟踪特性及稳定性。
【总页数】7页(P125-131)
【作者】常亚妮;郭红戈;张春美
【作者单位】太原科技大学电子信息工程学院
【正文语种】中文
【中图分类】U461
【相关文献】
1.基于神经网络逆系统的感应电机变频系统解耦控制
2.基于BP神经网络的电磁轴承逆系统解耦控制
3.基于神经网络逆系统方法的汽车底盘解耦控制
4.基于神经网
络逆系统的稳压器水位与压力解耦控制探析5.两电机调速系统的神经网络逆无模型自适应鲁棒解耦控制
因版权原因,仅展示原文概要,查看原文内容请购买。
人工智能算法在自动控制中的应用近年来,人工智能技术的飞速发展已经打破了许多我们曾经以为是固定不变的行业。
自动控制是其中之一。
人工智能算法的引入为自动控制带来了巨大的变革和进步。
本文将讨论人工智能算法在自动控制中的应用,并探讨其带来的优缺点。
一、智能控制将人工智能算法应用于自动控制中,可以实现更精准的控制,进而在工业生产中提高生产效率。
智能控制技术可以将人工智能技术与传统的控制技术相结合,从而实现对生产过程的全面掌控。
智能控制能够利用多种传感器和数据库中的数据来精确掌控生产过程中的各种参数。
基于大数据和机器学习,智能控制技术能够动态调整参数,实现自适应控制,提高生产效率。
同时,智能控制能够对产品进行检测和监控,及时发现和解决生产过程中的问题,减少生产成本,带来更多经济效益。
二、神经网络控制神经网络是一种模拟生物神经网络的学习算法,已经成功应用于自动控制中。
神经网络控制可以根据输入参数和输出参数之间的关系,通过学习实现更加准确的控制。
与传统控制相比,神经网络控制能够实现更加精准的控制,同时能够处理不确定性、非线性和参数变化等复杂的系统。
此外,神经网络控制还可以智能预测和处理生产过程中出现的问题,从而提高生产效率和减少生产成本。
三、遗传算法遗传算法是一种基于自然进化的优化算法,能够自动优化控制参数。
遗传算法可以通过遗传、交叉、变异等操作优化控制器的参数,从而实现更加准确的控制和调节。
遗传算法能够快速找到最优解,并且可以处理非线性、多元和高维的控制问题。
同时,遗传算法还能够在机器故障或者完全未知的控制场景下实现稳定控制。
但是,值得注意的是,对于传统自动控制技术来说,相对于人工智能算法,它的稳定性更为可靠,并且传统控制方法已经经过了长时间的验证和应用。
而智能控制技术仍处于快速发展期,它的适用范围和可靠性还需要进一步探索和验证。
总之,随着人工智能算法在自动控制中的广泛应用和不断发展,将能够进一步提高生产效率,降低生产成本,提高生产质量。
神经网络在机器人控制中的应用神经网络是一种模仿人类大脑神经元网络而设计的人工神经元网络系统。
它的应用涵盖了许多领域,包括机器人控制。
随着科技的不断进步,神经网络在机器人控制中的应用也越来越广泛。
本文将介绍神经网络在机器人控制中的应用,并探讨其在未来的发展前景。
神经网络在机器人控制中的应用可以说是非常广泛的。
通过将神经网络应用到机器人控制中,可以提高机器人的智能化水平,使其能够更好地感知环境、做出反应,并完成各种任务。
在工业领域,神经网络可以用于控制机器人完成自动化生产线上的各种操作,提高生产效率和产品质量。
在军事领域,神经网络可以用于控制无人作战飞机、地面车辆等,执行各种特定任务。
在医疗领域,神经网络可以应用于机器人辅助手术系统中,提高手术精确度和安全性。
在日常生活中,神经网络还可以应用于智能家居中,控制各种家庭机器人完成家务等。
要实现神经网络在机器人控制中的应用,首先需要对神经网络进行训练。
机器人通过神经网络获得环境信息,然后做出相应的反应。
神经网络的训练是一个非常重要的过程,它直接决定了机器人控制的效果。
在训练神经网络时,需要给它提供大量丰富的训练数据,使其能够学习到各种环境下的反应规律。
还需要对神经网络进行不断地调优和改进,以提高机器人控制的稳定性和准确性。
现有的神经网络在机器人控制中的应用主要有两种类型:一种是基于传统的神经网络算法,如BP神经网络、CNN等;另一种是基于深度学习的神经网络算法,如深度神经网络、循环神经网络等。
传统的神经网络算法在机器人控制中的应用主要是针对简单的环境和任务,其优势在于算法简单、易于实现,但对于复杂的环境和任务往往表现不佳。
深度学习的神经网络算法则可以处理更为复杂的环境和任务,其优势在于可以通过大量数据进行训练,学习到更为复杂的规律,因此在机器人控制中的应用具有更大的潜力。
随着人工智能技术的不断发展,神经网络在机器人控制中的应用也在不断地取得新突破。
未来,随着神经网络技术的进一步发展,我们可以预见到以下几个方面的发展趋势。
仿生智能算法在机器人控制中的应用随着科技的不断发展,人类的生活方式也得以改变,机器人的出现不仅在生产力上有一定的推动作用,而且在服务领域的应用日益广泛。
然而,在机器人的控制中,由于外部环境的复杂性,传统的控制算法无法满足需要。
于是,仿生智能算法应运而生,可以帮助机器人更好地适应复杂的环境,实现更加精准、高效的控制。
一、什么是仿生智能算法仿生智能算法是一种模仿生物学的运作方式和策略来解决复杂问题的方法。
它根据生物学现象设计算法,包括神经网络、基于遗传的算法等多种形式。
这些算法的主要原理就是模拟生物的智能并从中学习优化出相应的算法。
在仿生智能算法中,主要包括神经网络、进化计算、人工免疫学、蚁群算法、人工生命等多种模型,其中最常见的应用是神经网络和基于遗传的算法。
神经网络是将人脑神经元的工作方式模拟到计算机中实现学习功能和分类能力的一种计算模型,在机器学习领域具有重要作用。
基于遗传的算法则是模拟自然界进化原理来优化设计。
这些算法的优势在于可以帮助机器人更好地适应复杂的环境、提高机器人的智能水平和效率。
二、仿生智能算法在机器人控制中的应用仿生智能算法的应用范围广泛,其中在机器人控制中具有重要的作用。
机器人在不同的环境下需要完成不同的任务,但是机器人本身并没有人类的感知系统,也无法灵活地适应环境,因此需要通过算法来完成任务。
仿生智能算法的应用可以帮助机器人在不同的环境下完成任务,并提高机器人的智能水平。
1. 仿生智能算法在机器人控制中的应用这种算法可以用于机器人的自主导航系统中。
机器人利用传感器收集环境信息,通过计算机编程模拟生物学种种学到的规律和策略,最小化本身的能耗,实现自主导航并最终到达指定位置。
2. 仿生智能算法在机器人学习中的应用这种算法可以用于机器人的学习过程中。
机器人可以通过神经网络、基于遗传的算法等模型进行学习。
通过学习可以不断优化机器人的行为与决策过程,提高机器人的智能水平,使其在特定领域中专业化的表现得到进一步提升。
智能控制系统中的神经网络控制算法研究智能控制系统,作为现代智能技术的重要应用领域之一,正逐渐在各个行业和领域中得到广泛应用。
智能控制系统的核心是算法,而神经网络控制算法作为其中一种重要技术手段,正在引起学术界和工业界的高度关注和广泛研究。
本文将从神经网络控制算法的基本原理、应用领域以及未来的发展方向等角度进行深入探讨。
第一部分:神经网络控制算法的基本原理神经网络控制算法是通过模拟人类神经系统的工作原理,将模糊控制、遗传算法等多种智能算法与控制系统相结合,形成一种新的控制方法。
神经网络控制算法的基本原理是神经元之间通过权值的连接来传递信号,并通过训练来调整神经元之间的连接权值,从而实现对控制系统的优化调节。
神经网络控制算法的基本结构包括输入层、隐层和输出层。
输入层接收外部的控制信号,隐层是神经网络的核心部分,通过神经元之间的连接进行信息传递和处理,输出层将隐层的结果转化为实际控制信号。
第二部分:神经网络控制算法的应用领域神经网络控制算法具有很强的适应性和优化能力,因此在许多领域都得到了广泛应用。
在工业自动化领域,神经网络控制算法可以对复杂的工业过程进行建模和控制,例如化工过程中的温度、压力和流量等参数控制。
在机器人技术领域,神经网络控制算法可以实现机器人的智能控制和路径规划,提高机器人的自主性和适应性。
在金融领域,神经网络控制算法可以用于股票价格预测和交易策略优化,提高投资者的收益率和风险控制能力。
第三部分:神经网络控制算法的未来发展方向虽然神经网络控制算法已经在多个领域得到应用,但仍然面临一些挑战和难题。
首先,神经网络控制算法的鲁棒性和可解释性需要进一步提高。
目前的神经网络模型往往是黑箱模型,难以解释其内部的决策过程,这在某些关键领域(如医疗和安全)可能会受到限制。
其次,神经网络控制算法在处理大规模数据和复杂问题时的计算复杂度较高。
如何提高算法的计算效率和准确性是一个亟待解决的问题。
此外,在人工智能和大数据的推动下,深度学习等新兴技术也对神经网络控制算法的发展提出了新的要求和机遇。
人工智能的控制算法及其应用人工智能(Artificial Intelligence,AI)已成为当今的热门话题。
AI不仅令许多科技公司和投资机构在技术和投资方面关注该领域,还产生了广泛的应用。
AI可以被视为是计算机系统中的一种控制算法,其能够模拟人类思维进而实现自主决策。
本文将探讨人工智能的控制算法和其在各个领域中的应用。
一、人工智能的控制算法介绍人工智能的控制算法主要由传统的控制理论和机器学习技术相结合。
传统的控制理论主要利用数学模型和控制器来实现对系统的精确控制,机器学习技术则是通过历史数据来训练算法,进而使其能够做出预测和决策。
控制算法的构造通常包括两个主要方面:模型和控制器。
模型是对系统的数学描述,通常由微分方程或离散方程表示。
控制器可以被视为是人工智能的核心,控制器能够根据历史数据和当前输入来进行计算并判断输出结果。
目前较为常用的控制算法有反馈控制、前馈控制和组合控制三种。
在反馈控制中,系统的当前状态与期望状态之间的误差被测量并与一组预定义的控制参数一起反馈到控制器。
控制器利用此信息并对系统进行调整,直到误差为0或趋于0。
前馈控制则是用未来状态的信息来控制系统,从而预测和纠正任何即将发生的偏差。
组合控制是反馈控制和前馈控制的结合,能够更好地控制系统。
二、人工智能在各个领域中的应用1. 医疗保健随着医疗数据的增长,人工智能在医疗保健领域的应用日益广泛。
人工智能可用于计算机辅助诊断、影像学和流行病学研究等方面。
在计算机辅助诊断方面,人工智能可以通过深度学习和神经网络识别复杂疾病。
在影像学方面,人工智能可以对MRI和CT图像进行高效分析。
此外,人工智能也可用于规划医疗保健政策和改善医疗保健质量。
2. 智能制造人工智能在制造业中的应用日益普及,对于生产效率爆棚的工厂而言,它能够提高生产线的自适应性和灵活性。
人工智能能够检测到特定设备故障,可自动识别生产线上的问题并做出调整。
此外,它还能够帮助制造企业优化生产计划和提高供应链的效率。
英文翻译系别专业班级学生姓名学号指导教师Multivariable decoupling control based on fuzzy-neural network Abstract: This paper proposes a nonlinear multivariable decoupling control strategy based on fuzzy-neural networkαth-order inverse method that combines inverse system theory with fuzzy-neural network for fermentation process. Anonlinear inverse model is developed based on the reversibility analysis of the process model. A fuzzy-neural networkαth-order inverse system is then constructed, which is cascaded with this process to transform the original nonlinear systemto a pseudo-linear system. Finally, an expert controller is used to closed-loop synthesis. The effectiveness of the presented method is illustrated by a simulation experiment.Key words: bioprocesses; fuzzy-neural network; inverse system method; decoupling control; expert controllerCLC number: TP273 Document code: A1 IntroductionBioprocess is a nonlinear multivariable coupling system for involving complex factors such as microbial cells growth, metabolism and so on Decoupling control of this nonlinear multivariable system is a research topic of both theoretical and practical importance. Among these nonlinear system theories, the inverse system method is verified to be powerful .Unfortunately, this method is based on an exact mathematical model of the plant, which is impossible to obtain in bioprocess. To adopt the inverse system method in bioprocess, it is required to identify the structure of the αth-order inverse system without exact knowledge of mathematical model of the system model Among these identification methods, fuzzy-neural network, which possesses merits of both fuzzy logic and neural network, has proved to be more powerful and has been widely used in practical engineering This paper presents a multivariable decoupling control method based on fuzzy-neural network αth-order inverse system for fermentation process. Through analyzing the reversibility of the system model, a fuzzy neur al network αth-order inverse system is built, which is placed in series with the original fermentation system to transform it to three pseudo-linear composite subsystems. Finally, an expert PID controller strategy is given for closed-loop synthesis. An experiment is preformed to verify the effectiveness of our method..基于模糊神经网络α阶逆系统的发酵过程多变量解耦控制摘要:将逆系统方法与模糊神经网络相结合,提出一种基于模糊神经网络α阶逆系统的发酵过程解耦控制方法。
解释机器人运动学方程的正解和逆解正解与逆解是机器人运动学方程的重要概念,也是机器人学研究中最重要的内容之一。
正解和逆解可以帮助我们建立机器人的空间模型,从而控制机器人的运动状态,为机器人的实际应用提供有力的支持。
本文将对机器人运动学中的正解和逆解的概念及其在机器人学中的应用进行详细剖析。
一、正解与逆解概念介绍正解和逆解是机器人运动学中常用的概念,也是机器人学研究中最重要的内容之一。
正解是指从给定的末端位姿或空间位置确定机器人的轴位置的运算,而逆解则是反之,从给定的关节位置到末端位姿的运算。
因此,机器人运动学中的正解和逆解都是从关节位置到末端位姿和反之的一种运算。
二、正解的求解方法正解的求解方法主要有三种,分别为数值法、解析法和实验法。
(1)数值法数值法是指将从给定末端位姿或空间位置求解机器人轴位置的过程采用数学计算的方法来求解。
这种方法的优点在于可以根据实际情况采用不同的公式来求解,也可以用数值算法来求解机器人的轴位置。
其缺点是计算量大,求解速度慢,无法满足实时性要求。
(2)解析法解析法是指利用数学分析方法,从一整套已知机器人轴位置求解和从末端位姿求机器人轴位置的过程,运用特定的反函数,做单就反函数,解出机器人轴位置。
这种方法计算时间短,可以满足实时性要求,但缺点是所用的反函数不一定准确,容易发生解析法错误。
(3)实验法实验法是指实际应用中,通过针对特定的机器人空间进行实验,来确定机器人轴位置的过程。
这种方法好处在于可以得到准确的机器人轴位置,不受数学计算模型的影响,缺点是计算时间长,不能满足实时性要求。
三、逆解的求解方法逆解的求解方法主要也有三种,分别为数值法、解析法和实验法。
其中,数值法包括逐次迭代法、牛顿迭代法等;解析法包括几何法、角度法等;实验法包括传感器测量法、机器人调试法等。
(1)数值法数值法是通过几何和动力学方面的矩阵求解形式,利用数值计算技术,从给定的关节位置计算机器人构成末端位姿的过程。
文章编号 2 2 2
神经网络Α阶逆系统控制方法在机器人解耦控制中的应用Ξ
戴先中孟正大沈建强阮建山
东南大学自动控制系南京
摘要 本文利用神经网络Α阶逆系统线性化解耦能力 将严重耦合的多自由度机械手解耦成多个二阶积分子系统 进一步采用线性系统设计方法对已解耦系统设计闭环控制器 成功地实现了位置快速跟踪 该控制方法不需要知道机器人系统的精确数学模型 并且结构简单 易于工程实现
关键词 机器人 神经网络 逆系统 多变量解耦
中图分类号 ×° 文献标识码
ΡΟΒΟΤΔΕΧΟΥΠΛΙΝΓΧΟΝΤΡΟΛΒΑΣΕΔΟΝΑΝΝ
ΑΤΗ−ΟΡΔΕΡΙΝςΕΡΣΕΣΨΣΤΕΜΜΕΤΗΟΔ
⁄ ÷ 2 ∞ 2 ≥ ∞ 2 2
ΑυτοματιχΧοντρολΕνγ Δεπτ οφΣουτηεαστΥνιϖ Νανϕινγ
Αβστραχτ Α 2 √ √ ¬ ∏ ⁄ƒ ∏ ≥ ≥ ∏ × √ ∏ ∏ ∏
2 √
√ ∞¬ ∏ √ ∏ • ∏ ∏ ∏
Κεψωορδσ ∏ √ ∏ √ ∏
1引言 Ιντροδυχτιον
由于多自由度机械手模型的非线性和强耦合性 机械手的轨迹快速跟踪控制一直是控制领域中富有挑战性的课题之一 基于局部线性化理论的传统°⁄和° ⁄控制器仅能使得系统在一个很小的工作空间内获得较好的跟踪性能 基于非线性全局线性化理论而提出的计算力矩法由于可以使闭环系统获得完全的解耦和线性化 从而能在整个工作空间中获得良好的跟踪特性 但是计算力矩法所需的模型参数完全准确以及不存在测量误差等条件在工程实际中较难得到满足 为此 一些学者又先后提出了自适应控制等方案
本文利用神经网络Α阶逆系统线性化解耦能力≈ 将严重耦合的多自由度机械手解耦成多个二阶积分子系统 进一步采用线性系统设计方法对已解耦系统设计闭环控制器 成功地实现了位置快速跟踪
2多变量系统的神经网络Α阶逆系统解耦控制方法 ΔεχουπλινγχοντρολμετηοδοφΜΙΜΟσψστεμβασεδονΑΝΝΑτη−ορδερινϖερσεσψστεμ
考察一个用输入输出微分方程表示的 ρ
个输入Υ ρ个输出Ψ 非线性系统Ε
Φ Ψ Α Ψ2 Υ 其中
第 卷第 期 年 月机器人ΡΟΒΟΤ∂
∏
Ξ基金项目 国家自然科学基金资助项目 收稿日期
Ψ Α ≈ψ Α ψ Α , ψ Αρ ρ
ΤΥ ≈υ υ , υρ Τ
Ψ2 ≈Ψ Ψ , Ψι , Ψρ Τ
Ψι ≈ψι ψ ι , ψ Αι ι
ι , ρ
若系统可逆 其Α Α ≈Α Α , Αρ 阶积分逆系
统可表示为
Υ Θ Ψ Α Ψ2
若将系统的Α阶积分逆系统串联在原系统之前 重新定义输入
Υ Ψ Α Υ ψ Α , Υρ
ψ Αρ ρ
组成一伪线性复合系统 其传递函数为
Γ σ Δ Α Δ Α , Δ Αρ
由上式可以看出 只要能构造出多变量系统的Α阶逆
系统 它与原系统组成的复合系统就变成多个≥ ≥ 伪线性积分系统 这样就实现了对原系统的解耦 再利用已经成熟的线性系统控制方法 可以实现对原系统的控制 但在很多情况下 即使知道系统是可逆的 若不知道原系统的精确数学模型 也不可能得到其Α阶逆系统 解耦也就无从谈起 利用神经网络对非线性系统的逼近能力≈ 构造如图 虚线框所示的动态神经网络 即用静态神经网络来逼近逆系统对应的静态非线性函数 用积分器来反映逆系统各变量之间的动态关系 构造这样的神经网络Α阶逆系统既不需要知道系统的数学模型 除相对阶数Α外 并且结构简单!具有很强的对逆系统的动态非线性
逼近能力 易于工程实现 例如对某一 输入 输出
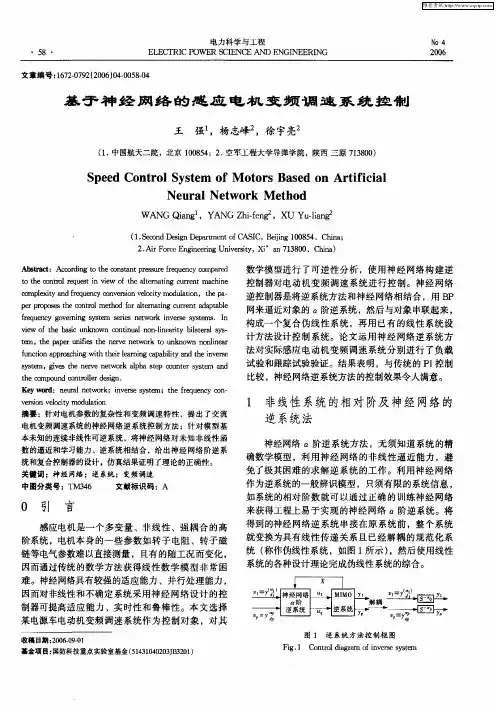
Α ≈ 非线性系统完整的控制框图如图 所示
图 多变量系统的神经网络Α阶逆系统复合控制系统
ƒ × ∏ Α 2 √
3 神经网络Α阶逆系统控制方法在机器人
解耦控制中的应用 ΑππλιχατιονοφΑΝΝ
Ατη−ορδερινϖερσεσψστενμετηοδινροβοτδεχουπλινγχοντρολ
3 1 多自由度机械手线性化解耦可行性
一个ρ自由度的机器人的动力学模型可以表示为
Δ Η Ηβ Η Η Ηα Γ Η Σ
其中Σ为 ρ≅ 维控制力矩向量 Η为 ρ≅ 维关节
角向量 Δ Η 为 ρ≅ρ 维惯性矩阵 Η Η Ηα 为哥氏及离心力矩向量 Γ Η 为 ρ≅ 维重力力矩向量 当
以控制力矩Σ为输入 关节角Η为输出时 原系统显然是一个可逆系统 在实际机械手控制系统中 当采用直流电机作为驱动电机时 力矩与电机电流成正
比 在实验中 电机控制采用速度!电流双环控制方式 如图 所示 而将逆系统的输出作为速度环的输入 因此下面仅讨论包括双环在内的原系统的动力学模型 忽略漏感 直流电机方程为
Υ Ρι ΧΕΥν
由图 双环控制系统的关系式为
νδ
Υ ΚιΠιι
ΠιΠν Κνν
注意到驱动力矩Σ正比于电机电流ι
Σ ΙΧΜ5ι
或
κΣΣ ι
式中Ι为传动比 联合 式 有
机 器 人 年 月
νδ
Ρ ΚιΠιΠιΠνΚΣΣ ΧΕΥ
ΠιΠν
Κν ν
ΧΣΣ Χνν
对ρ自由度机械手有
νδ νδρ
ΧΣ , ΧΣ
,
,ω ,ΧΣρΣ Σρ
Χν , Χν
,
,ω
,
Χνρ
ν ν νρ
将 式代入 式 并注意到ν与Η间的关系 可知以速度给定Ηδ为输入 关节角Η为输出的系统是
可逆的 因而可构造神经网络Α阶逆系统 Α ≈
, ≅ρ 与原系统复合实现线性化解耦 如图 所
示
3 2 神经网络Α阶逆系统工程实现与辨识
试验针对 2 工业机器人的腕一与腕二进行 对此两连杆机械手
神经网络Α阶逆系统由一个
层前馈神经网络和 个积分因子组成 如图 所
示 神经网络有 个输入结点!两个输出结点和一个隐层 隐层的结点数为
图 包括电流!速度双环在内的机械手结构示意图
ƒ
⁄ ∏
∏
图 多自由度机械手Α阶逆系统解耦示意图
ƒ ⁄ ∏ ⁄ƒ Α 2 √
在确定了神经网络Α阶逆系统结构之后 逆系统辨识以及神经网络训练过程如下 注 在训练辨识过程中 不需要知道被控系统的模型与参数
给机械手输入具有不同幅值 周期为 秒的
方波 νδ νδ 以 秒的周期采样给定速度 νδ
νδ 和相应的关节角位置 Η 和Η 获得 组输
入输出数据
经过滤去高频噪声后 计算输出Η !Η 的一
阶!二阶数值微分 重组以上数据得到训练数据集
Ηβ Ηα Η Ηβ Ηα Η
和 νδ νδ 用于网络训练 直到逆系统达到给定的训练精度 3 3 复合控制器设计
对已解耦的两个子系统分别附加超前滞后控制器
σ
σ
如图 所示 就完成了整个跟踪控
第 卷第 期戴先中等 神经网络Α阶逆系统控制方法在机器人解耦控制中的应用
制器的设计
图 自由度机械手神经网络复合控制系统
ƒ 2⁄ ƒ ∏ Α 2 √
4 实验结果及分析 Εξπεριμεντρεσυλτσ
机械手初始工作点 即机器人的电气零位
Η τ Π
Η τ Π
Ηα
τ Ηα τ
为了检验控制方法的跟踪性能 给被控系统以不同
的期望轨迹作为参考输入 采用同一控制器参数考察机械手关节角位置的响应曲线 从而检验控制效果 图 为实际系统对方波给定的响应 图 为对三角波给定的响应 从图中可以看到 当给定信号幅值与频率都改变时 系统基本上能对给定信号实现有效的跟踪
图 对方波的跟踪响应特性 为腕一 为腕二 实线为给定 虚线为跟踪
ƒ ≥ ∏ √ ƒ
∏ √ √
机 器 人 年 月
图 对三角波的跟踪响应特性 为腕一 为腕二 实线为给定 虚线为跟踪
ƒ × ∏ √ ƒ
∏ √ √
参考文献 Ρεφερενχεσ
÷ ⁄ ⁄ Α 2 √ ≥ ≤ ≥ ≤ ° × ƒ ∏ ≤ ∂ ≤ ∞× ∏ ≥ 3
÷ ⁄ ∏ ∏ ≤ ∏ ƒ ⁄ ∏ Α 2 √ ≥ ≤ ≤ ∏ ∏ ≥ ∞∞∞° 2≤ × 145 √ ≤ ∏ ∞∞∞× ∏ ≠ ≤ ≤ ∏ ∏ √ ∏ ≥ 14
作者简介
戴先中 2 男 年清华大学工学博士 现为东南大学自控系教授 博士生导师 研究领域 神经网
络 非线性控制 机器人控制与电力系统控制
孟正大 2 男 研究领域 机器人控制与自动化
上接第 页
参考文献 Ρεφερενχεσ
≥ √ • ÷网络编程 清华大学出版社
× ⁄
日本机器人学会 机器人技术手册 科学出版社 北京
∞ 开发 ∏¬应用 用 × 和 ⁄ 开发 ∏¬图形界面应用 电子工业出版社
∏ ∏ ∏ ∗
• • ≥ ÷编程指南 清华大学出版社
≠ ∏ ∏ ≥ × × ∏ ⁄ ∂ ∏ ≥
° ∞∞∞ ≤ ∏ ∏ ∏ ∏ ∞• ¬
贾志刚 精通 电子工业出版社
周巍松 ∏¬系统分析与高级编程技术 机械工业出版社
周远清 张再兴 智能机器人系统 清华大学出版社 北京作者简介
陈一民 2 男 教授 研究领域 计算机控制 网络与多媒体技术的研究
张涛 2 男 硕士生 研究领域 多媒体技术
薛广涛 2 男 硕士生 研究领域 多媒体技术
第 卷第 期戴先中等 神经网络Α阶逆系统控制方法在机器人解耦控制中的应用。