用静态拉伸法测金属丝的杨氏弹性模量
- 格式:docx
- 大小:43.15 KB
- 文档页数:4
拉伸法测量金属丝的杨氏模量实验报告《拉伸法测量金属丝的杨氏模量实验报告》
嘿,朋友们!今天我要来给你们讲讲我做的拉伸法测量金属丝杨氏模量的实验,那可真是一次超级有趣的体验啊!
实验开始前,我就像要去探险一样兴奋!我准备好了各种器材,那根金属丝就静静地躺在那里,好像在等着我去揭开它的秘密。
我心里想着:“这根小小的金属丝里到底藏着怎样的奥秘呢?”
然后我和小伙伴们一起动手啦!我们小心翼翼地把金属丝安装到实验装置上,就像在给一个小宝贝安家一样。
我还打趣地说:“嘿,可得轻点儿对它呀!”大家都笑了。
当我们开始施加拉力的时候,那种感觉就像是在和金属丝拔河一样。
它一开始还有点不情愿呢,不过慢慢地就开始伸长啦!看着它一点点变化,我心里那个激动啊,哎呀,真的很难形容!就好像看着一颗种子慢慢发芽长大。
在测量数据的过程中,我们可真是一丝不苟啊!每一个数值都像是宝贝一样,生怕记错了。
我和小伙伴还互相提醒:“嘿,你可看准了啊,别出差错!”这感觉就像是在完成一项超级重要的任务。
经过一番努力,终于得出了结果!哇,那种满足感简直爆棚!就好像我们征服了一座小山一样。
这次实验让我深刻地体会到了科学的魅力,它就像一个神秘的宝藏,等着我们去挖掘。
总之,这次实验真的是太棒了!你们也快去试试吧,绝对会让你们大开眼界的!。
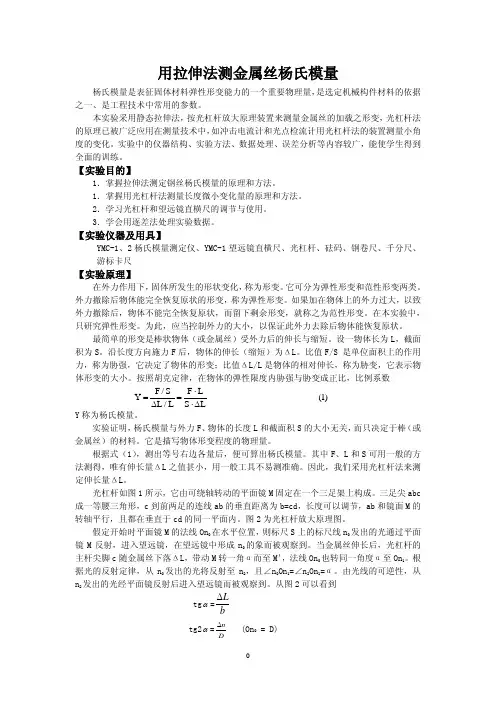
用拉伸法测金属丝杨氏模量杨氏模量是表征固体材料弹性形变能力的一个重要物理量,是选定机械构件材料的依据之一、是工程技术中常用的参数。
本实验采用静态拉伸法,按光杠杆放大原理装置来测量金属丝的加载之形变,光杠杆法的原理已被广泛应用在测量技术中,如冲击电流计和光点检流计用光杠杆法的装置测量小角度的变化。
实验中的仪器结构、实验方法、数据处理、误差分析等内容较广,能使学生得到全面的训练。
【实验目的】1.掌握拉伸法测定钢丝杨氏模量的原理和方法。
1.掌握用光杠杆法测量长度微小变化量的原理和方法。
2.学习光杠杆和望远镜直横尺的调节与使用。
3.学会用逐差法处理实验数据。
【实验仪器及用具】YMC-1、2杨氏模量测定仪、YMC-1望远镜直横尺、光杠杆、砝码、钢卷尺、千分尺、游标卡尺【实验原理】在外力作用下,固体所发生的形状变化,称为形变。
它可分为弹性形变和范性形变两类。
外力撤除后物体能完全恢复原状的形变,称为弹性形变。
如果加在物体上的外力过大,以致外力撤除后,物体不能完全恢复原状,而留下剩余形变,就称之为范性形变。
在本实验中,只研究弹性形变。
为此,应当控制外力的大小,以保证此外力去除后物体能恢复原状。
最简单的形变是棒状物体(或金属丝)受外力后的伸长与缩短。
设一物体长为L ,截面积为S 。
沿长度方向施力F 后,物体的伸长(缩短)为ΔL 。
比值F/S 是单位面积上的作用力,称为胁强,它决定了物体的形变;比值ΔL/L 是物体的相对伸长,称为胁变,它表示物体形变的大小。
按照胡克定律,在物体的弹性限度内胁强与胁变成正比,比例系数Y 称为杨氏模量。
实验证明,杨氏模量与外力F 、物体的长度L 和截面积S 的大小无关,而只决定于棒(或金属丝)的材料。
它是描写物体形变程度的物理量。
根据式(1),测出等号右边各量后,便可算出杨氏模量。
其中F 、L 和S 可用一般的方法测得,唯有伸长量ΔL 之值甚小,用一般工具不易测准确。
因此,我们采用光杠杆法来测定伸长量ΔL 。
拉伸法测金属丝杨氏模量实验报告用拉伸法测金属丝的杨氏模量参考报告用拉伸法测金属丝的杨氏模量参考报告一、实验目的1.学会用拉伸法测量杨氏模量;2.掌握光杠杆法测量微小伸长量的原理;3.学会用逐差法处理实验数据;4.学会不确定度的计算方法,结果的正确表达;5.学会实验报告的正确书写。
二、实验仪器YWC-1杨氏弹性模量测量仪(包括望远镜、测量架、光杠杆、标尺、砝码)、钢卷尺(0-200cm ,0.1cm)、游标卡尺(0-150mm,0.02mm)、螺旋测微器(0-25mm,0.01mm) 三、验原理在外力作用下,固体所发生的形状变化称为形变。
它可分为弹性形变和塑性形变两种。
本实验中,只研究金属丝弹性形变,为此,应当控制外力的大小,以保证外力去掉后,物体能恢复原状。
最简单的形变是金属丝受到外力后的伸长和缩短。
金属丝长L,截面积为S,沿长度方向施力F后,物体的伸长?L,则在金属丝的弹性限度内,有:FY?SLL我们把Y称为杨氏弹性模量。
如上图:Ltgx?x(A1A0) LA1?A02D2DFF12d8FLDY 2Lxdx(A1A0)(A1?A0)LL四、实验内容一仪器调整1、杨氏弹性模量测定仪底座调节水平;2、平面镜镜面放置与测定仪平面垂直;3、将望远镜放置在平面镜正前方1.500-2.000m左右位置上;4、粗调望远镜:将镜面中心、标尺零点、望远镜调节等高,望远镜的缺口、准星对准平面镜中心,并能在望远镜外看到尺子的像;5、调节物镜焦距能看到尺子清晰的像,调节目镜焦距能清晰的看到叉丝;6、调节叉丝在标尺0刻度?2cm以内,并使得视差不超过半格。
二测量1、下无挂物时标尺的读数A0;2、依次挂上1kg的砝码,七次,计下A1,A2,A3,A4,A5,A6,A7;3、依次取下1kg的砝码,七次,计下A1,A2,A3,A4,A5,A6,A7;4、用米尺测量出金属丝的长度L(两卡口之间的金属丝)、镜面到尺子的距离D;5、用游标卡尺测量出光杠杆x、用螺旋测微器测量出金属丝直径d。
用拉伸法测金属丝的杨氏模量实验报告用拉伸法测金属丝的杨氏模量实验报告引言:杨氏模量是材料力学性质的重要指标之一,它描述了材料在拉伸过程中的刚度和变形能力。
本实验通过拉伸金属丝的方法来测量杨氏模量,旨在了解金属丝的力学性质,并探讨拉伸过程中的变形行为。
实验装置和步骤:实验装置主要包括拉伸机、金属丝样品、刻度尺、电子天平和计算机。
具体的实验步骤如下:1. 将金属丝样品固定在拉伸机的夹具上,并调整夹具使其与拉伸机的拉伸轴心对齐。
2. 通过调整拉伸机的拉伸速度和加载范围,使实验能够在合适的条件下进行。
3. 使用刻度尺测量金属丝的初始长度,并记录下来。
4. 启动拉伸机,开始对金属丝进行拉伸。
5. 在拉伸过程中,使用电子天平测量金属丝的质量,并记录下来。
6. 当金属丝断裂时,停止拉伸机的运行,并记录下金属丝的最终长度。
实验数据处理:根据实验步骤所得到的数据,可以计算出金属丝的应力和应变。
应力定义为单位面积上的力,可以通过施加在金属丝上的拉力除以金属丝的横截面积得到。
应变定义为单位长度上的变形量,可以通过金属丝的伸长量除以初始长度得到。
根据胡克定律,应力与应变之间的关系可以用以下公式表示:应力 = 弹性模量× 应变其中,弹性模量即为杨氏模量。
通过绘制应力-应变曲线,可以得到金属丝的杨氏模量。
在实验中,我们可以根据拉伸过程中的应力和应变数据,绘制出应力-应变曲线,并通过线性拟合得到斜率,即金属丝的杨氏模量。
实验结果和讨论:根据实验数据处理得到的应力-应变曲线,我们可以得到金属丝的杨氏模量。
实验结果显示,金属丝的杨氏模量为XXX GPa(Giga Pascal)。
这个结果与文献中的数值相符合,证明了实验方法的可靠性。
在拉伸过程中,金属丝会发生塑性变形,即超过了材料的弹性限度。
这是因为金属丝在受到拉力的作用下,晶体结构发生了位错滑移,导致金属丝的形状发生变化。
当拉力超过金属丝的极限强度时,金属丝会发生断裂。
金属丝杨氏弹性模量的测定及其实验数据【实验目的】1.学习静态拉伸法测金属丝的杨氏模量。
2.掌握用光杠杆法测量微小长度变化的原理和方法。
3.利用有效的多次测量,及相应处理方法来减小误差。
【实验仪器】杨氏模量测量仪,光杠杆,望远镜尺组,米尺,游标卡尺【实验原理】根据胡克定律,金属丝的杨氏弹性模量, L是一个微小长度变化量,当金属丝直径为0.5毫米时, L约为10-5米。
实验中采用光杠杆镜尺法测量。
利用光杠杆镜尺法由几何原理可得,光杠杆的放大倍数为β=2D/b,一般D=1.5—2.0米,b=7.0厘米,所以放大倍数约为40倍。
通过在增加(减)砝码的同时测出标尺读数Xi和其他的长度量L、D、d、b,就能求得金属丝的杨氏弹性模量Y. 【实验内容】1.调整支架,使金属丝处于铅直位置2.调光杠杆和望远镜,使能在望远镜中看清标尺像,并无视差。
3.通过增减砝码,测出相应的标尺读数Xi′和Xi″(共加五个砝码),由Xi= Xi′/ Xi″,用逐差法求出?Xi。
重复一次。
4.测出L、D、d、b,重复六次,求出杨氏模量,【注意事项】1.仪器一经调好,测量开始,切勿碰撞移动仪器,否则要重新调节,老师检查数据前也不要破坏调节好的状态,否则一旦有错误,将难以查找原因或补作数据。
2.望远镜、光杠杆属精密器具,应细心使用操作。
避免打碎镜片,勿用手或他物触碰镜片。
3.调节旋钮前应先了解其用途,并预见到可能产生的后果或危险,不要盲目乱调,以免损坏仪器,调节旋钮时也不要过分用力,防止滑丝。
4.用螺旋测微计测量钢丝直径时,要端平测微计,避免钢丝弯曲,【数据处理】1.增减重量时钢丝伸缩量的记录数【思考题】1.在本实验中,为什么可以用不同精确度的量具测量多种长度量?为什么有些需要多次测量,有些单次测量就可以?2. 如何用十几个砝码即快又精确地测量出金属丝的平均伸长量,应该用什么方法来计算?3.光杠杆法可测微小长度变化,其主要是采用了光放大原理,放大率为β=2D/b 。
用拉伸法测量金属丝的杨氏弹性模量实验报告拉伸法测量金属丝的杨氏弹性模量实验报告
实验原理:
拉伸实验是指将弹性样品整体承受一直拉力F,而其同时受轴向拉力T的拉伸实验,
通过测量拉伸实验的样品的拉伸变形量,推知其伸长量与轴向荷载(T)之比,这一比值
就是杨氏弹性模量。
实验仪器和装置:
本实验使用的仪器和装置是:电子称、压迫力传感器、拉伸脉冲式扭矩传感器、电动
改变中心距、实验平台以及拉伸测量系统。
实验环境:
实验环境稳定,温度、湿度均在20℃时,室温保持在25℃以下,湿度保持在50%以下;光照明亮,可使测量精度更高。
实验方法:
1.选取合格的金属丝样品,将金属丝在两个支点上受上力,其中间部分悬空放置,应
用拉伸传感器,将力传感器的正负极接线联接到拉伸测量系统,以便测量拉伸时的变形量;
2.调节力传感器的拉伸力,测量金属丝在拉伸情况时的杨氏弹性模量;
3.如果所测量金属丝中受力跨度较短,可以适当增加测量力的大小,控制其变形量,
以测得最终结果;
4.在做精度处理时,应按试验标准及要求的容差,采取逐渐迭代的原则做精确的测量,充分检验该样品的杨氏弹性模量;
5.最后,将实验最终结果和测得的参数对比,进行分析,得出金属丝的杨氏弹性模量
大小,从而完成此次实验。
实验结论:
本次实验以拉伸法测量金属丝的杨氏弹性模量,由于采用了拉伸测量仪器和设备,对
金属丝进行严格控制,从而极大提高测量精度,最终杨氏弹性模量结果达到设计要求。
实验 1 拉伸法测量杨氏模量杨氏弹性模量 (以下简称杨氏模量 )是表征固体材料性质的重要的力学参量,它反映材料弹性形变的难易程度,在机械设计及材料性能研究中有着广泛的应用。
其测量方法有静态拉伸法、悬臂梁法、简支梁法、共振法、脉冲波传输法,后两种方法测量精度较高;本实验采用静态拉伸法测量金属丝的杨氏模量,因涉及多个长度量的测量,需要研究不同测量对象如何选择不同的测量仪器。
【实验目的】1. 学习用静态拉伸法测量金属丝的杨氏模量。
2. 掌握钢卷尺、螺旋测微计和读数显微镜的使用。
3. 学习用逐差法和作图法处理数据。
4. 掌握不确定度的评定方法。
【仪器用具】杨氏模量测量仪(包括砝码、待测金属丝)、螺旋测微计、钢卷尺、读数显微镜【实验原理】1. 杨氏模量的定义本实验讨论最简单的形变——拉伸形变,即棒状物体(或金属丝 )仅受轴向外力作用后F 与应变L的伸长或缩短。
按照胡克定律:在弹性限度内,弹性体的应力成正比。
SL设有一根原长为l ,横截面积为 S 的金属丝(或金属棒),在外力 F 的作用下伸长了L ,则根据胡克定律有F E( L)( 1-1)SL式中的比例系数 E 称为杨氏模量,单位为 Pa (或 N · m –2)。
实验证明,杨氏模量E 与外力 F 、金属丝的长度L 、横截面积 S 的大小无关,它只与制成金属丝的材料有关。
若金属丝的直径为d ,则 S1 d 2,代入( 1-1)式中可得 44FLE( 1-2)d 2 L( 1-2)式表明,在长度、直径和所加外力相同的情况下, 杨氏模量大的金属丝伸长量较小,杨氏模量小的金属丝伸长量较大。
因此,杨氏模量反映了材料抵抗外力引起的拉伸(或压缩)形变的能力。
实验中,测量出F、 L、 d、 L 值就可以计算出金属丝的杨氏模量 E 。
2.静态拉伸法的测量方法测量金属丝的杨氏模量的方法就是将金属丝悬挂于支架上,上端固定,下端加砝码对金属丝 F ,测出金属丝的伸长量L ,即可求出 E 。
拉伸法测金属丝的杨氏模量实验报告引言:杨氏模量是描述某物质材料在受到拉伸或压缩时,弹性变形程度大小的一个物理量。
在实际应用中,杨氏模量常用于描述金属、合金、非晶态材料等材料的弹性特性。
在本次实验报告中,我们将通过拉伸法测量金属丝的杨氏模量。
实验目的:1. 了解拉伸法测定金属丝杨氏模量的基本原理。
2. 掌握拉伸法测定金属丝杨氏模量的实验方法。
3. 掌握实验数据的处理方法,确定金属丝的杨氏模量。
实验原理:当杆(或丝)在轴向受到拉伸力 F 后,其长度增加ΔL,应变为 E。
定义贯穿力 F、应变 E 和初始长度 L 的比值为一项物理量,称为杨氏模量 Y。
根据杨氏定律可得:$$ Y = \frac {F/A} {\Delta L/L} $$其中 A 为截面面积。
实验步骤:1. 用细钢丝制备试件,长度大于两倍的所需要的长度。
2. 将一个试件端固定,另一端悬挂一重物,使得钢丝呈直线状,测试钢丝的长度L0。
3. 用万能测量仪测试钢丝悬挂重物后的长度 L1。
4. 根据悬挂的重量计算钢丝的拉力 F。
5. 重复以上步骤,重复至少三次,记录不同重量下的拉力及钢丝的长度变化。
6. 计算每个拉力及钢丝长度变化的平均值,并绘制拉力-长度变化曲线。
7. 根据拉力-长度变化曲线计算钢丝杨氏模量 Y。
实验数据及处理:重量(kg)|拉力F(N)|长度变化ΔL(mm)|-|-|-|0.001|0.0098|0.15|0.002|0.0196|0.30|0.003|0.0294|0.45|0.004|0.0392|0.60|0.005|0.0490|0.74|计算钢丝的杨氏模量:平均截面积A = πd^2/4 = π(0.18mm)^2/4 = 2.54×10^(-5)m^2计算平均应变 E 平均长度变化ΔL/L =(0.15mm+0.30mm+0.45mm+0.60mm+0.74mm)/(200mm) = 0.0025E = ΔL/L = 0.0025/5 = 0.0005计算杨氏模量 Y Y = F/A/E =(0.0098N+0.0196N+0.0294N+0.0392N+0.0490N)/(5×2.54×10^(-5)m^2×0.0005) =1.96×10^11 Pa实验结果:经过实验测试,我们得到了金属丝的杨氏模量为 1.96×10^11 Pa。
拉伸长法测定金属丝的杨氏弹性模量[实验目的]1、弹性限度内,验证虎克定律,学习用静态拉伸法测定金属丝的杨氏弹性模量。
2、掌握光杠杆法测定长度微小变化的原理,并掌握其使用,学会望远镜尺组的使用。
3、学会用逐差法处理数据。
[实验仪器与器材]1、弹性模量测定仪(包括主体支架、光杠杆、望远镜尺组)2、待测金属丝3、螺旋测微器、钢卷尺、直尺4、砝码组5、水准仪 [实验原理]测定某金属的杨氏弹性模量,一般采用弹性限度内的拉伸试验。
取一粗细均匀的金属丝,长为L ,截面积为42d S π=,d 为截面直径,将其上端固定,下端悬挂质量为m 的砝码,测金属丝内产生单位面积的强力,即应力S F =δ,单位长度的伸长应变LL∆=ε,虎克定理指出,在弹性限度内,应力与应变成正比,即LLy S F ∆= (5-1-1) y 称为金属材料杨氏弹性模量,它完全由材料的性质所决定。
将(5-1-1)式改写成 ySFLL =∆ (5-1-2) 为了验证应力和应变的线性关系,一般均采用增量法,即 分成几次来逐渐增加负载,而不是一次就将载荷加至最终值, 如多次增加相同的拉力F ,相应地测出伸长增加量L ∆也大致 相等。
这样就验证了虎克 定律的正确性。
将(5-1-1)式改写成为 Ld FLL S FL y ∆=∆=24π (5-1-3) 根据(5-1-3)式测出等式右边各量,杨氏弹性模量便可求得。
F (砝码重量)、金属丝原长L 和截面积为S 都可用一般方法测 定。
唯有伸长量L ∆,由于甚微,为了测量准确起见,需用特别的方法测定它,本实验采用光杠杆法测定之。
1、 杨氏模量仪如图5-1所示,三角底座上装有两根立柱和调整螺丝。
欲使立柱铅直,可调节调整螺丝,并由立柱下端的水平仪来判断。
待测金属丝的上端紧固于主体支架的上夹具A 上,其下端穿过中部平台C 中的下夹具B ,施紧下夹具,金属丝即被夹住。
下夹具下悬挂砝码,当金属丝伸长或缩短时,下夹具也随之上下移动。
HARBIN ENGINEERING UNIVERSITY物理实验报告实验题目:拉伸法测金属丝的杨氏模量姓名:张志林物理实验教学中心实验报告一、实验题目:拉伸法测金属丝的杨氏模量二、实验目的: 1. 掌握静态拉伸法测量金属丝的杨氏模量2. 学会光杠杆法测量微小长度变化量的技巧3. 巩固逐差法处理实验数据4. 接受有效数字计算和不确定度计算的训练三、实验仪器:数显液压加力杨氏模量测定仪,新型光杠杆,螺旋测微计和钢卷尺四、实验原理(原理图、公式推导和文字说明):E =F L /∆LS(1)E ─ 杨氏模量,固体材料抵抗形变能力的重要物理量,固有属性,取决于材料,F/S ─ 应力,∆L/L ─ 应变,F、S、L易测,∆L不易测,采用光杠杆法设金属丝的直径为d,有E=4FL/πd2ΔL (2)当金属丝受力后,产生微小伸长,光杠杆后足尖便随托板一起作微小移动,并使光杠杆绕前足尖转动一微小角度,从而带动光杠杆反射镜转动相应的微小角,这样标尺的像在光杠杆反射镜和调节反射镜之间反射,便把这一微小角位移放大成较大线位移。
这就是光杠杆产生光放大的基本原理。
下面我们来导出本实验的测量原理公式。
光杠杆放大原理示意图标尺和观察者在两侧,开始时光杠杆反射镜与标尺在同一平面,在望远镜中读到的标尺读数为n0,当光杠杆反射镜的后足尖下降ΔL,将会产生一个微小偏转角θ,此时在望远镜中读到的标尺读为n1, n1-n0即为放大后的钢丝伸长量N,常称作视伸长。
由图可知ΔL=b tanθ≈bθN= n1-n0=D tan4θ≈4Dθ所以它的放大倍数为A0=NΔL=n1-n0/ΔL=4Db可得E=16FLD/πd2bN (3)式中D为调节反射平面镜到标尺的距离,b称为光杠杆常数,即为光杠杆后足尖到两前足尖连线的垂直距离。
五、实验数据处理(整理表格、计算过程、结论):700.0222=∆+∆+=∆仪仪d S d (mm) )mm (7.0222=∆+∆+=∆仪仪N S N )N/m (1096.11022.152.80812.014.3101.1135.4600.516162118232---⨯=⨯⨯⨯⨯⨯⨯⨯⨯==bN d FLD E π%1.24222222=⎪⎭⎫⎝⎛∆+⎪⎭⎫ ⎝⎛∆+⎪⎭⎫ ⎝⎛∆+⎪⎭⎫ ⎝⎛∆+⎪⎭⎫ ⎝⎛∆+⎪⎭⎫ ⎝⎛∆=∆b b N N D D L L F F d d E E )N/m (1004.0211-⨯=∆⨯=∆EEE E)N/m (10)04.096.1(211-⨯±=E六、总结及可能性应用(误差分析、收获、体会及本实验的应用):1.增加D 可进一步提高放大倍数;2.水平没调对结果会有影响;3.也可利用作图法进行处理;4.钢丝是否要定期更换。
拉伸法测金属丝的杨氏弹性模量学院:………专业:………届别:………班级:……….学生姓名:………学号:……….拉伸法测金属丝的杨氏弹性模量【内容摘要】本文的主要内容是以放大法测量金属丝的杨氏模量,先介绍了杨氏模量;然后介绍了实验的目的、原理及内容;其次是实验数据处理;最后是实验结果的讨论和不确定度简单介绍。
为了更精确了处理数据,我们采用了逐差法对实验数据进行了处理。
【关键词】杨氏弹性模量;静态拉伸法;金属丝;光杠杆【引言】杨氏弹性模量是描述材料抵抗弹性形变能力的物理量, 它是工程技术中机械构件选材时的重要参数。
本实验用静态拉伸法测定一种金属丝的杨氏弹性模量.静态拉伸法通过测量对试样直接加力下的形变来测量试样的杨氏弹性模量,原理直观、设备简单,测量方法、仪器调整、数据处理等方面都具有代表性,是力学基础实验之一. 光杠杆是一种利用光学放大方法测量微小位移的装置. 其方法在近代精密仪器中常有应用. 例如在原子力显微镜(AFM)的系统中,就是利用光杠杆的原理使用微小悬(cantilever) 来感测针尖与样品之间的交互作用,这作用力会使悬臂摆动,再利用激光将光照射在悬臂的末端,当摆动形成时,会使反射光的位置改变而造成偏移量,此时激光检测器会记录此偏移量,并把此时的信号传给反馈系统,以利于系统做适当的调整,最后再将样品的表面特性以影像的方式呈现出来.在实验中,通过砝码的增减来改变对试样施加的拉力. 在增加和减去砝码的过程中,砝码数相同时对应的标尺读数往往是不一致的,在尽量消除和减小各方面的影响后,仍存在有规律的偏差.从原理上说,只要所加负载是一样的,测得的伸长值应当是一致的. 为什么出现这种偏差?对实验结果有什么影响? 本文对多种可能的影响因素进行了分析。
在实验方法上,通过本实验可以看到,以对称测量法消除系统误差的思路在其它类似的测量中极具普遍意义。
在实验装置上的光杠杆镜放大法,由于它的性能稳定、精度高,而且是线性放大,所以在设计各类测试仪器中得到广泛的应用。
用拉伸法测金属丝的杨氏弹性模量实验报告示范实验报告示范 1实验名称:用拉伸法测金属丝的杨氏弹性模量一(实验目的学习用拉伸法测定钢丝的杨氏模量;掌握光杠杆法测量微小变化量的原理;学习用逐差法处理数据。
二(实验原理F/SlS长为,截面积为的金属丝,在外力的作用下伸长了,称为杨氏模量(如图1)。
设钢,lY,F,l/l4lF2d丝直径为,即截面积,则。
S,,d/4Y,2,,ld伸长量比较小不易测准,因此,利用光杠杆放大原理,设计装置去测伸长量(如图2)。
,l,lFlL8bb?Y,由几何光学的原理可知,,。
,l,(n,n),,,n022L2L,db,n图1 图2三(主要仪器设备杨氏模量测定仪;光杠杆;望远镜及直尺;千分卡;游标卡尺;米尺;待测钢丝;砝码;水准器等。
四(实验步骤1. 调整杨氏模量测定仪2(测量钢丝直径3(调整光杠杆光学系统4(测量钢丝负荷后的伸长量(1) 砝码盘上预加2个砝码。
记录此时望远镜十字叉丝水平线对准标尺的刻度值。
n0'''(2) 依次增加1个砝码,记录相应的望远镜读数。
n,n,?,n127''''''''(3) 再加1个砝码,但不必读数,待稳定后,逐个取下砝码,记录相应的望远镜读数。
n,n,?,n,n7610''''''(4) 计算同一负荷下两次标尺读数(和)的平均值。
nnn,(n,n)/2iiiii ,n(5) 用隔项逐差法计算。
5. 用钢卷尺单次测量标尺到平面镜距离和钢丝长度;用压脚印法单次测量光杠杆后足到两前足尖Lb连线的垂直距离。
6(进行数据分析和不确定度评定,报道杨氏模量值。
实验报告示范 2五(数据记录及处理1d(多次测量钢丝直径d表1 用千分卡测量钢丝直径(仪器误差取0.004) mm测量部位上中下平均测量方向纵向横向纵向横向纵向横向d(mm)0.718 0.714 0.705 0.704 0.705 0.711 0.710,242.64 .16 .25 .36 .25 .01 (d,d)(,10mm)0.278 id钢丝直径的:1122A类不确定度 u(d),(d,d),(d,d)/(n,1),,Aiin(n,1)n,4,0.278,10/(6,1),0.0024 mm,0.004B类不确定度mm u(d),,,0.0023B3322u(d),u(d),u(d),总不确定度0.0034 mm CABu(d)0.0034C相对不确定度 0.48% u(d),,,r0.710dd,(0.710,0.004)mm,测量结果 ,u(d),0.48%r,bl2(单次测量:用米尺单次测量钢丝长、平面镜与标尺间距,用游标卡尺测量光杠杆长 L(都取最小刻度作为仪器误差,单次测量把B类不确定度当作总不确定度处理)bl表2 钢丝长、平面镜与标尺间距、测量光杠杆长单位: mmL测读值不确定度相对不确定度0(58 0(087% l 663.0 u(l)r0(58 0(064% u(L) 907.5 Lr0(012 0(016% b u(b)75.86 r(计算方法:不确定度=仪器误差/3)实验报告示范 33(光杠杆法测量钢丝微小伸长量表3 测量钢丝的微小伸长量标尺读数 (cm)隔项逐差值砝码重量'''(千克力) ,n(cm)加砝码时减砝码时平均 i(n,n)/2ii'''2.00 n1.80 1.88 1.84 nn000- nn0.75 40'''3.00 n 2.01 2.09 2.05nn111'''4.00 n 2.20 2.27 2.23 nn222- nn0.74 51'''5.00 n2.38 2.44 2.41nn333'''6.00 n 2.56 2.61 2.59 nn444- nn0.74 62'''7.00 n 2.78 2.79 2.79 nn555'''8.00 n2.96 2.98 2.97 nn666- nn0.73 73'''3.13 3.15 3.14 9.00 nnn777所以,在F=4.00千克力作用下,标尺的平均变化量Δn=0.74 cm Δn的总不确定度Δn相对不确定度 u(,n),u(,n),0.0012cmu(,n),0.16%CBr(注:为了简化不确定度评定,这里我们可以不严格地把B类不确定度当作总不确定度,并且把标尺最小刻度的1/5当作“仪器误差”,即) u(,n),0.02/3,0.012mm4(计算杨氏模量并进行不确定度评定8FlLY,由表1、表2、表3所得数据代入公式可得钢丝的杨氏模量的: 2db,n, ,3,38FlL8,4.00,9.8,663.0,10,907.5,10112Y,,2.123,10近真值=(N/m) 2,32,3,2,db,n3.14,[0.710,10],75.86,10,0.74,1022222相对不确定度 u(Y),[u(l)],[u(L)],[2u(d)],[u(b)],[u(,n)]rrrrrr22222,0.98%,0.00087,0.00064,(2,0.0048),0.00016,0.0016112,0.21,10总不确定度 (N/m) u(Y),u(Y),YCr112,Y,(2.12,0.21),10N/m测量结果 ,uY(),0.98%r,。
用静态拉伸法测金属丝的杨氏弹性模量
材料受力后发生形变。
在弹性限度内,材料的胁强与胁变(即相对形变)之比为一常数,叫弹性模量。
条形物体(如钢丝)沿纵向的弹性模量叫杨氏模量。
杨氏弹性模量是描述固体材料抵抗形变能力的重要物理咼.是选左机械构件的依摒之一,是工程技术中常用的参数。
测呈材料的杨氏弹性模量有拉伸法、梁的弯曲法、振动法、内耗法等等,本实验采用静态拉伸法测上杨氏弹性模量。
要求掌握利用光杠杆测左微小形变(角度)的方法。
在实验方法上,通过本实验可以看到,以对称测量法消除系统误差的思路在其它类似的测量中极具普遍意义。
在实验装置上的光杠杆镜放大法,由于它的性能稳怎、精度高,而且是线性放大,所以在设计各类测试仪器中得到广泛的应用。
在数据处理上,本实验采用一种常用的逐差法,这种方法在实验中经常被使用。
一.实验目的
1.学会测量杨氏弹性模虽的一种方法;
2.掌握用光杠杆法测量微小伸长量的原理:
3.学会用逐差法处理实验数据。
二.实验仪器
杨氏模量仪、光杠杆、望远镜尺组、米尺、千分尺。
三.实验原理
1 任何固体在外力作用下都要发生形变,当外力撤除后物体能够完全恢复原状的形变称为弹性形变。
如果加在物体上的外力过大,以致外力撤除后,物体不能完全恢复原状而留下剩余形变,称为塑性形变(或范性形变)。
本实验只研究弹性形变。
因此所加外力不宜过大。
最简单的形变是棒状物体受外力后的伸长或缩短。
设钢丝截而积为S.长为厶。
今沿长度方向施以外力F使棒伸长△厶。
则比值F/S是单位截而上的作用力,称为应力(胁强);比值厶是物体的相对伸长量,称为应变(胁变).它表示物体形变的大小。
根据胡克左律,在物体的弹性限度内,应力与应变成正比,即
匚=丫•兰
s L(1)
式中比例系数Y的大小,只取决于材料本身的性质,与外力F、物体原长厶及截而积S的大小无关•叫做材料的杨氏弹性模量。
在材料工程中,它是一个重要的物理呈。
上式可写为丫=旦
s△厶(2)
根据(2)式,测出等号右边各量后,便可算岀杨氏模量。
其中氏厶和S可用一般方法测得,微小伸长量4L用一般的咼具不易准确测量。
本实验采用光杠杆镜尺组进行长度微小变化的测量,这是一种非接触式的长度放大测量的方法。
同时,金属线截而积可用
S =丄7rd2
测其直径〃来获得, 4 。
则(2)式可写为
—4FL
TTC F'L(3)
下而介绍用光杠杆法测量微小伸长SAL的方法。
光杠杆装豊包括两部分,一是光杠杆镜架,其结构如图1所示,光杠杆是一个带有可旋转的平而镜的支架,平而镜的镜而与三个足尖决左的平面垂直,其后足即杠杆的支脚与被测物接触,当杠杆支脚随被测物上升或下降微小距离△厶时,镜面法线转过一个&角,而入射到望远镜的光线转过2&角,如图2所示.当&很小时,
0 q tiin 0 =—
K(4)
式中K为支脚尖到刀口的垂直距离(也叫光杠杆的臂长)。
根据光的反射左律,反射角和入射角相等,故当镜而转动&角时・反射光线转动2&角,由图可知
2^«tan2<9 = —« —
D K(5)
式中D为镜面到标尺的距离,N为从望远镜中观察到的标尺移动的距离(设长度变化前望远镜中的叉线横线读出标尺上相应的刻度值为必,当长度变化△厶时,光杠杆镜而向右倾斜了0角,"足绕加轴也转过0角,这时读数为小,两次读数差为N =
由(4)式和(5)式得微小伸长量为
AL = —
2D(6)
式中2D/K为光杠杆的放大倍数,把(6)式代入(3)得
―塔FLD
兀 F KN(?)
上式即为本实验测左金属线杨氏模量的理论公式。
四.实验内容及数据处理
1.调整杨氏模量仪
(1)调节杨氏模量仪下部三脚底座上的水平调整螺钉使立柱铅直(平台水平)。
(2)将光杠杆放在平台上,两前足置于横槽内,后足放在活动夹子上,但不可与金属丝相碰。
调整平台上下位置,使光杠杆三足尖位于同一水平面上。
(3)加360g舷码在磁码托上,把金属线拉直。
检査夹子是否能在平台的孔中上下自由地滑动,金属丝是否被上下夹子夹紧。
此时上、下夹子之间的钢丝长度即为其原长厶。
2.光杠杆及望远镜尺组的调节
(1)将望远镜尺组放在离光杠杆镜而约l・5m处,安放时尽量使望远镜和光杠杆的髙度相当,望远镜光轴水平,标尺和望远镜光轴垂直。
(2)调肖望远镜时先从望远镜的外侧沿镜筒的方向观察,看镜筒的延长线是否通过光杠杆的镜而,以及镜而内是否有标尺的像,若无,则可移动望远镜三脚架并略微转动望远镜,保持镜筒的轴线对准光杠杆的镜而,直到沿镜简上方能看到光杠杆镜内有标尺的像为止。
(3)调节望远镜的目镜,使镜筒内十字叉丝淸晰。
再调肖望远镜的调焦手轮,使标尺在望远镜中成像淸晰无视差。
(4)仔细调肯光杠杆小镜的倾角以及标尺的髙度,使尺像的零线(在标尺的中间)尽可能落在望远镜十字叉丝的横丝上,记下尺像的读数巾。
3.测量
(1)分析公式4中各物理量的测左条件以及对实验结果的误差影响,确左对这些物理量进行单次测量还是多次测量,使用何种测量器具。
(2)轻轻地依次将360g舷码加到舷码托上(共5次),记录每一次从望远镜中测得的标尺像的读数心再将所加的5个360g5i码轻轻地依次取下,并记录每减少360g舷码时的小。
注意加减庇码时勿使磁码托摆动,并将珏码缺口交叉放置,以免倒落。
测量过程中
应随时注意检查与判断所测数拯的合理性,即在增加或减少祛码过程中,当金属丝荷重相等时读数应基本相同,若相差很大,必须先找原因,再重做实验。
(3)用米尺测量光杠杆镜而至标尺的距离D和上下夹子之间金属丝的长度L.
(4)将光杠杆三足放在平纸上压出足印,测出后足到两前足连线的距离
(5)用螺旋测微讣在钢线的不同方向和部位多次测量直径/共测6次,取〃的平均值.
填入表中。
(6)用逐差法处理数据小,求代
将测量中采集的数据分成前后两组,用逐差法处理数据,可得每增减1080g舷码时,望远
镜中标尺像读数的变化量的平均值N
_ 1 2
N =江5» -叫)
》/-(>
(7)将上述数据代入(4)式讣算出杨氏弹性模量,并讣算其不确怎度。
五.实验数据表格及处理
2.测钢丝的直径d数据表千分尺零点读数:________ mm
3.各单次测咼
当地重力加速度g二
光杠杆到镜面标尺的距离D±u o=_______________________________
上下夹子之间金属丝的长度L土%= ________________________
光杠杆后足到两前足连线的距离K±"K = ________________
4.讣算金属的杨氏弹性模量Y和不确定度(有关计算应列出讣算公式,代入实验数据,
再写出计算结果)
六、实验思考题
(1)在本实验中,你是如何考虑尽量减小系统误差的?
(2)本实验中使用了哪些长度测量仪器?选择它们的依据是什么?它们的仪器误差各
为多少?
(3)本实验应用的“光杠杆镜”放大法与力学中杠杆原理有哪些异同点?
(4)加挂初始磁码的作用是什么?
(5)为什么钢丝长度只测量一次,且只需选用精度较低的测量仪器?而钢丝直径必须用精度较高的仪器多次测量?
(6)请根拯实验测得的数据计算所用光杠杆的放大倍数。
如何提髙光杠杆的放大倍数?
(7)在本实验中如何消除视差?
附录。