基于混合灵敏度的H∞鲁棒控制器的设计仿真
- 格式:docx
- 大小:16.63 KB
- 文档页数:4
不确定线性系统的输出反馈鲁棒H∞控制仿真【摘要】针对一类具有积分二次型约束结构不确定性的系统的设计问题,提出了一种新的鲁棒H∞控制方案。
从具有指定干扰抑制能力的不确定性系统的绝对稳定控制着手,通过加入额外的不确定性,构成一个新的不确定系统,然后对这个新系统设计绝对稳定的H∞控制器。
【关键词】鲁棒;控制;绝对稳定A Control Simulation For Uncertain linear system of robust h-infinity output feedbackZHANG Da-lei LI Yuan-yuan LIU Qian(1.Qinhuangdao Insititute of Technology Hebei Qinhuangdao 066100;2.Ziehl-Abegg Mechanical and Electrical Equipment Limited Company Zhongguo Shanghai 201605)【Abstract】For a class of quadratic constraint integral structural uncertain system design, this paper proposes a new robust h-infinity control scheme. Mainly from has designated interference suppression ability the uncertainty of the absolute stability control system to, by adding extra uncertainty, constitutes a new uncertain systems, and then on this new system design which isunconditionally stable h-infinity controller.【Key words】Robust h-infinity;Control;Isunconditionally stable工程上所建立的系统数学模型和控制系统中,在不同程度上都存在着某种不确定的因素,诸如模型参数、输入、测量误差等是未知的或不能精确地确定的等。
基于混合灵敏度的磁悬浮系统鲁棒控制器设计薛鹏;韩家乐;张楠【摘要】以单自由度悬浮球为控制对象,针对实际系统存在参数摄动和不确定干扰的问题,提出了基于混合灵敏度的鲁棒控制策略.首先,在平衡位置采用局部线性化方法建立悬浮系统动态模型.然后,计算误差、控制量和输出三通道的传递函数,并根据性能要求设计各通道灵敏度的加权函数.将控制器设计问题转换为标准H∞控制形式,利用MATLAB的鲁棒控制工具箱计算得到控制参数.仿真结果表明,所得控制方案能保证悬浮球对目标位置的稳定准确跟踪,对系统主要电气、机械参数的摄动及外部不确定干扰有一定抵抗力,具有较强的鲁棒性.【期刊名称】《河南工程学院学报(自然科学版)》【年(卷),期】2018(030)003【总页数】5页(P23-27)【关键词】磁悬浮;混合灵敏度;参数摄动;鲁棒控制【作者】薛鹏;韩家乐;张楠【作者单位】河南工程学院电气信息工程学院,河南郑州451191;河南工程学院电气信息工程学院,河南郑州451191;河南工程学院电气信息工程学院,河南郑州451191【正文语种】中文【中图分类】TP273由于没有直接的机械接触,磁悬浮技术具有无摩擦、污染小的显著优势,在交通、工业等领域的应用前景非常广阔[1-2].研究被控对象在目标位置的稳定准确悬浮有明显的工程意义.控制器一般是以被控对象的数学模型为前提设计得到的,并且在系统性能要求不高的情况下,PID控制通常是首选方案[3-5].然而,实际系统往往存在参数变化、未建模动态特性、不可预测的干扰等不确定因素,有些实际系统还存在无法进行数学建模的部分[6].因此,希望所得控制器在系统存在不确定因素影响的情况下仍可保持较好的控制效果.鲁棒控制就是为了解决在系统存在模型不确定或外界干扰时设计控制器使得系统保持预期性能要求问题的一种控制算法.本研究首先在简化假设的基础上,建立了磁悬浮系统在目标平衡位置的线性模型,进而采用混合灵敏度方法,优选灵敏度加权函数,完成反馈控制器的设计.对所得系统的性能分析以模型不确定性问题为重点,在系统位置刚度系数和电流刚度系数摄动情况下,仿真讨论了所得控制系统的跟踪效果.在被控对象(悬浮球)上施加10%的随机位置干扰,测试了所得控制系统抵抗外部干扰的能力.数据表明,所得控制系统能实现小球在目标位置的稳定悬浮,并在控制系统参数摄动和外界干扰时具有较强的鲁棒性.1 磁悬浮系统模型磁悬浮装置的电磁环节很难进行精确计算,所以系统分析需要在一定简化假设的基础上进行.建模过程中,假设铁芯没有磁滞现象,是磁饱和的,铁芯的磁通率无限大,并假设线圈中的电磁感应系数在平衡点附近为常数.在上述假设条件下,以悬浮球为对象进行刚体受力分析.系统基本原理如图1所示.图1中,m为钢球的质量,x表示电磁铁与刚体之间的距离,i为电磁铁绕组中的电流,F(x,i)表示线圈通电时刚体所受的电磁力,fd(t)表示系统所受的干扰力.图1 磁悬浮系统原理分析Fig.1 Principles of magnetic levitation system根据牛顿第二定律,可得刚体球的运动方程为(1)这里,电磁力F(x,i)与气隙x的平方成反比,有(2)式中:为空气导磁率;S为电磁铁的极面积;N为电磁线圈匝数.当电磁吸引力和被悬浮对象的重力相等时,系统处于平衡状态.记平衡点为(x0,i0),此时有边值条件F(x0,i0)=mg.(3)将电磁吸引力F在平衡点处进行泰勒展开,忽略高阶无穷小量,得F(x,i)=F(x0,i0)+kx(x-x0)+ki(i-i0),(4)式中:电气参数是位移刚度;机械参数是电流刚度.将式(4)代入式(1),整理可得(5)分别用L、R表示电磁铁的电磁感应系数和阻抗,可得电磁线圈的电路方程为(6)式中:u0和u(t)分别表示平衡电压和电压的调节增量.由于在平衡点处有边值条件Ri0=u0,进而(7)联立式(5)和式(7),可得悬浮系统的线性化模型为(8)忽略干扰力fd(t),取气隙间距x和被悬浮对象的运动速度为系统状态变量,即线圈电流i为系统输入,气隙间距x为系统输出,可得悬浮系统的状态空间模型为(9)2 混合灵敏度混合灵敏度H∞控制方法是指通过合理选择加权函数使闭环系统满足所需各项性能指标要求的鲁棒H∞控制方法[7].这种控制易于转化为标准H∞控制的形式,可借助MATLAB软件的标准控制工具箱完成计算.磁悬浮系统混合灵敏度H∞控制系统如图2所示.图2 磁悬浮系统的混合灵敏度控制Fig.2 Mixed sensitivity control structure for magnetic levitation system图2中,r为给定输入,e为位置跟踪误差,u为控制量,z=[z1 z2 z3]T为评价信号,y为系统输出,d、n分别为干扰输入和测量噪声,W1、W2和W3分别为灵敏度加权函数、线性加权函数和补灵敏度加权函数.记G为被控对象的开环传递函数,K为鲁棒控制器,控制系统从r到e、r到u,和r到y的传递函数分别为(10)式中:S和T分别为系统的灵敏度函数和补灵敏度函数,满足S+T=I.所以,系统r到z的闭环传递函数阵为(11)混合灵敏度H∞控制的主要任务就是寻找一个真有理控制器K(s),使系统闭环稳定且满足(12)通过逐渐缩小γ使之逼近γ0,可实现控制次优解向最优解的逼近.混合灵敏度H∞控制的设计过程主要是对S、R和T的加权函数W1、W2和W3的选择,这是H∞设计的关键.下面给出3个加权函数的设计思路:(1)W1(s)是灵敏度函数S的加权函数,S是系统参考输入到跟踪误差的传递函数,也是系统干扰输入到系统输出的传递函数,它反映了系统对输出端扰动的抑制性能.由于扰动通常发生在低频区域,为了抑制扰动,希望灵敏度函数S的增益最小.因此,低频段的加权函数值应尽量加大,所以所选的W1(s)是具有低通特性的实有理函数,即W1(s)反映了扰动的频谱特性.(2)W2(s)是R的加权函数,R是系统输入到控制量的传递函数,引入W2(s)可以限制控制量的大小,防止系统在实际工作过程中产生严重的饱和现象及控制量过大而造成对执行器的伤害.为了不增加控制器的阶次,W2(s)可取为一个实数.(3)W3(s)是补灵敏度函数T的加权函数,表示乘性摄动的范数界,系统因模型不确定性而产生的扰动对系统的影响主要集中在高频段.为了使系统对模型不确定性具有鲁棒性,W3(s)应具有高通性质,其上升斜率可取大一些,以保证闭环系统对高频干扰的抑制.需要说明的是,混合灵敏度H∞控制器的设计难点是对加权函数的选择,不同的被控对象、不同的设计指标需要不同的加权函数,加权函数之间并没有特定的规律可循,其选择主要依赖设计者的实践经验.3 磁悬浮系统鲁棒控制器仿真及分析3.1 控制器设计磁悬浮系统鲁棒控制器设计的主要工作如下:通过合理地选择加权函数W1、W2和W3,设计鲁棒控制器K=K(s),从而调节功率放大器的输入电压,进而调节电流以实现钢球的悬浮控制.其中,加权函数的选择是系统控制器设计的关键.选取具有低通性质的灵敏度加权函数W1(s),形式为(13)为了不增加控制器的阶次,一般线性加权函数W2(s)可取为常数,即W2(s)=c,c>0.(14)选取具有高通性质的补灵敏度加权函数W3(s),形式为(15)表1 悬浮系统主要参数Tab.1 Parameter list of the magnetic levitation system参数符号值悬浮钢球质量/gm46 电磁铁线圈电感/mHL 109电磁铁线圈电阻/ΩR 9.6电磁铁线圈匝数N 2 024铁芯截面积/m2S 227×10-6以磁悬浮系统状态空间模型(9)为控制对象,基于表1列出的系统参数,经过实验对比和分析,选取系统的加权函数分别为(16)加权函数W1(s)和W3(s)的对数幅频曲线如图3所示.可见,W1(s)具有低通特性而W3(s)具有高通特性,满足选择条件.以上述选择为主要参数,基于MATLAB的鲁棒控制工具箱进行控制器设计,得控制器传递函数为(17)图3 加权函数的对数幅频曲线Fig.3 Logarithmic amplitude frequency curveof weighted functions3.2 系统性能仿真分析图4 目标位置跟踪仿真曲线Fig.4 Simulation curve of target position tracking将式(17)所得控制器用于表1所示的悬浮装置,对所得单自由度悬浮球位置控制系统的性能进行仿真试验.这里主要验证3个方面:对给定目标位置的跟踪性能,内部参数摄动对跟踪性能的影响和外部干扰对位置跟踪性能的影响.(1)目标位置跟踪性能仿真图4给出的是悬浮球对目标位置跟踪的仿真效果.其中,目标位置为平衡位置向上10 mm,小球的位置动态变化情况用实线表示.从图4中可见,系统实现了悬浮球对目标位置的无差跟踪,超调量为12%,调节时间为0.08 s.数据表明,悬浮球对目标位置的动态跟踪既快又稳,所得悬浮控制系统具有较好的目标位置跟踪性能. (2)内部参数摄动影响分析在实现目标位置跟踪控制的前提下,进一步讨论当出现内部参数摄动或者存在外部干扰造成悬浮球抖动的情况下,所得方案能否保证悬浮球对目标位置的有效跟踪. 首先,考虑内部参数摄动对所得控制系统的影响,讨论位移刚度kx和电流刚度ki 出现摄动的情形.仿真图(图5和图6)中的实线都表示原系统的目标位置跟踪结果,虚线表示对应参数变化后的位置动态跟踪情况.图5对应的仿真设定中,将位移刚度变为原来的5倍.从仿真结果可以看出,位置跟踪的超调量基本没有变化,也不存在稳态误差,但是调节时间增加到了0.12 s,有明显增加.也就是说,位移刚度的增加影响了系统调节时间,减缓了目标跟踪速图6对应的仿真过程中,假定电流刚度增加到了原来的3倍.从仿真结果可以看出,所得悬浮系统的稳态误差仍然为0,调节时间明显减少,约为0.015 s,但超调量增加到了72%.可见,电气部分的电流波动有可能导致悬浮球偏离可控区域而造成失控.对比发现,电气环节不确定因素造成影响的危险程度远大于机械干扰.(3)外部干扰影响分析再对位置输出受到外力干扰的情况进行随机分析.在输出位置信号上施加10%目标位置的随机干扰,仿真试验中,目标位置为平衡点向上10 mm,故施加随机干扰的幅值设定为1 mm.随机干扰下的目标位置跟踪仿真曲线见图7.图5 目标位置跟踪仿真曲线(5·kx)Fig.5 Simulation curve of target position tracking(5·kx)图6 目标位置跟踪仿真曲线(3·ki)Fig.6 Simulation curve of target position tracking(3·ki)图7 随机干扰下的目标位置跟踪仿真曲线Fig.7 Simulation curve of target position tracking with random disturbance图7给出的仿真结果显示,悬浮球在目标位置做不规则上下抖动,抖动幅度较小且可控.这表明,所得系统对外部直接干扰的影响具有一定的抵抗能力,即具有较好的鲁棒性.4 结语磁悬浮系统的控制器通常基于其数学模型设计,建模过程中的假定前提忽略了系统的未建模部分.针对系统电磁、机械参数的摄动和外部干扰等不确定因素的影响,采用混合灵敏度方法,通过加权函数的选择,为单自由度悬浮球的位置控制问题设计了鲁棒控制器.仿真结果显示,所得方案能够控制悬浮球在目标位置实现稳定悬浮.进一步的测试数据显示,在位置刚度或电流刚度发生摄动或者存在外部直接位置干扰的情况下,所得控制方案仍能保持较好的控制性能,具有较强的鲁棒性.【相关文献】[1] 张维煜,朱熀秋,袁野.磁悬浮轴承应用发展及关键技术综述[J].电工技术学报,2015,30(12):12-20.[2] 江东,孔德善,刘绪坤,等.磁悬浮系统仿真及混沌特性研究[J].系统仿真学报,2017,29(3):572-580.[3] 薛鹏,韩家乐,李保龙.基于LQ优化的磁悬浮输出反馈控制器设计[J].河南工程学院学报(自然科学版),2017,29(3):39-43.[4] 王玲玲,吴华丽.基于模糊PID的磁悬浮球控制系统研究[J].计算机测量与控制,2017,25(5):109-111.[5] 任鹏飞,薛鹏.基于修正BP的磁悬浮系统PID控制参数优化[J].河南工程学院学报(自然科学版),2016,28(3): 42-46.[6] 朱坚民,沈正强,李孝茹,等.基于神经网络反馈补偿控制的磁悬浮球位置控制[J].仪器仪表学报,2014,35(5):976-986.[7] 张磊,苏为洲.伺服系统的反馈控制设计研究综述[J].控制理论与应用,2014,31(5):545-559.。
基于LMI的H_∞鲁棒PID控制器设计
李会军;陈明军
【期刊名称】《控制工程》
【年(卷),期】2007(14)3
【摘要】针对一类线性系统,研究了基于H∞的鲁棒PID控制器的设计方法,使得闭环系统的所有极点均位于一个给定的LMI区域中。
采用线性矩阵不等式的处理方法,证明了该问题等价于一组线性矩阵不等式的可解性问题。
利用该线性矩阵不等式的可行解给出了PID控制器的构造方法,并通过现有的软件Matlab中的工具箱LMI来进行求解。
该方法很好地解决了PID控制下的极点指标和H∞鲁棒控制的相容性问题。
实际的工程算例验证了该方法的有效性和可行性。
【总页数】4页(P294-296)
【关键词】H∞鲁棒控制;PID控制器;线性矩阵不等式
【作者】李会军;陈明军
【作者单位】东南大学仪器科学与工程系;南京理工大学自动化系
【正文语种】中文
【中图分类】TP27
【相关文献】
1.基于LMI的工业控制仿真器的H∞鲁棒PID控制器设计 [J], 王佳伟;杨亚非;钱玉恒;赵新宇
2.基于LMI的鲁棒PID控制器设计及工业应用 [J], 赵众;高培;李海霞
3.典型二阶积分对象的鲁棒H_∞ PID控制器的解析设计 [J], 刘涛;顾诞英;张卫东
4.基于LMI方法的机器人LPV鲁棒H_∞控制器设计 [J], 虞忠伟;陈辉堂;王月娟
5.基于静态H_∞-回路成形方法的蒸汽发生器水位鲁棒PID设计 [J], 周世梁;刘玉燕;段锋
因版权原因,仅展示原文概要,查看原文内容请购买。
驱动电机负载模型H∞控制器设计一、引言电动机是指能将直流电能转换成机械能的旋转电机。
电动机按使用电源不同分为直流电动机、交流电动机;按照定子和转子的相对速度可分为同步电机、是异步电机。
作为最常用的驱动执行器,它在车辆中应用广泛,如门窗的起降,自动雨刮器,电动汽车驱动,冷却风扇,发动机起动机等等。
目前电机的控制,尤其是直流电机的控制方法,主要以PID控制和LQR控制为主。
随着汽车性能要求的不断提高,人们越来越关注于系统的稳定性,对于电机的控制也提出了新的要求。
尤其是作为电动汽车的驱动电机,在车辆行驶过程中,特别是高速行驶中,一个微小的摄动可能会对车辆运动产生很大的影响。
在驱动电机工作过程中,由于环境温度变化等工作状况的变动;外部路面干扰;车辆负载突增;老化机械参数变化;建模误差等缘故,会造成模型不精确,也就是模型的不确定性是广泛存在,不可避免的。
因此,需要一种固定的控制器,可以保证模型与实际系统出现偏差时,仍能保持所需的控制品质。
而鲁棒性就是系统的强壮性。
这便引出了使用鲁棒控制来解决电机负载扰动这一问题的讨论。
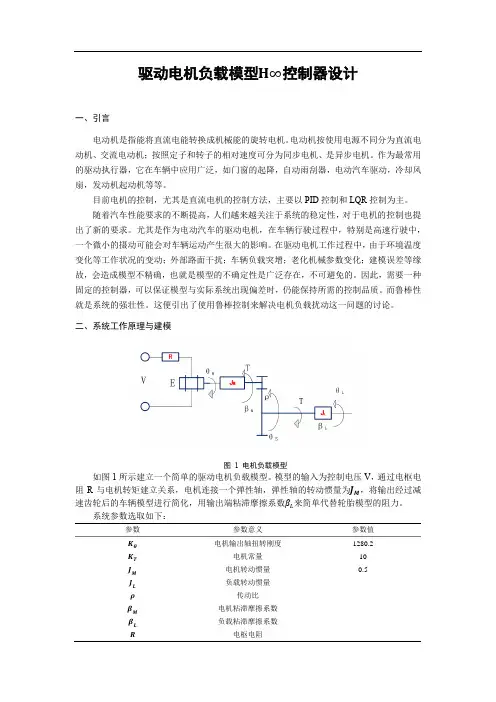
二、系统工作原理与建模图 1 电机负载模型如图1所示建立一个简单的驱动电机负载模型。
模型的输入为控制电压V,通过电枢电阻R与电机转矩建立关系,电机连接一个弹性轴,弹性轴的转动惯量为J M,将输出经过减速齿轮后的车辆模型进行简化,用输出端粘滞摩擦系数βL来简单代替轮胎模型的阻力。
系统参数选取如下:参数参数意义参数值Kθ电机输出轴扭转刚度1280.2K T电机常量10J电机转动惯量0.5MJ负载转动惯量Lρ传动比β电机粘滞摩擦系数Mβ负载粘滞摩擦系数LR电枢电阻建立系统的微分方程。
首先,电机扭矩与电流直接相关:M =K T ×I其中K T 是电机固有参数。
接下来建立驱动电机负载模型的扭矩关系式:J L ×ωL +K θ(θL −θM ρ)+βL ×ωL =0 (1) J M ×ωM =K T ×I −βM ×ωM +K θρ(θL −θM ρ) (2) 设置电机负载系统输入为电压值V ,输出为负载转速ωL ,建立驱动电机负载模型的状态空间方程。
基于LMI的工业控制仿真器的H∞鲁棒PID控制器设计王佳伟;杨亚非;钱玉恒;赵新宇【摘要】推导了工业控制仿真器的数学模型,将工业控制仿真器配置为一个二阶的刚体对象.使用极点区域配置和H∞性能指标,并且利用线性矩阵不等式这一强大的数学工具,为其设计了鲁棒PID控制器,进行了仿真验证,得到的仿真结果表明了所设计控制器的有效性.【期刊名称】《实验技术与管理》【年(卷),期】2015(032)003【总页数】4页(P137-140)【关键词】线性矩阵不等式;工业控制仿真器;PID控制器;鲁棒性控制器【作者】王佳伟;杨亚非;钱玉恒;赵新宇【作者单位】哈尔滨工业大学飞行器控制实验教学中心,黑龙江哈尔滨 150001;哈尔滨工业大学飞行器控制实验教学中心,黑龙江哈尔滨 150001;哈尔滨工业大学飞行器控制实验教学中心,黑龙江哈尔滨 150001;哈尔滨工业大学飞行器控制实验教学中心,黑龙江哈尔滨 150001【正文语种】中文【中图分类】TP271控制系统的鲁棒性是指系统参数发生变化或有干扰信号作用时仍可使控制效果保持不变的性能。
普通PID控制器是以固定的PID参数去适应被控过程中的不确定性因素,鲁棒性较差,很难获得令人满意的控制效果。
线性矩阵不等式(linearmatrix inequality,LMI)是一种近年来被广泛使用的很有效的数学工具,特别是Matlab的LMI工具箱提供了数值求解线性矩阵不等式的工具,使得对线性矩阵不等式的求解更加方便。
在控制领域中,由于许多问题都能转化为线性矩阵不等式的可解性问题,或者具有线性矩阵不等约束的优化问题,因此,LMI工具箱已经成为解决控制问题、提高PID控制器鲁棒性的一个极其重要数学工具[1-2]。
工业控制仿真器是一个综合实验平台,可以仿真单轴仿真转台[3-5]、主轴传动机械[6]、传送带[7-8]、数控机床[9-10]、自动装配生产线[11-12]等工业生产设备,可以模拟这些设备的控制性能,包括加入摩擦、齿轮间隙变化[13-14]和干扰后系统的响应性能。
基于H∞混合灵敏度的导弹解耦控制器设计方法1 引言导弹在大攻角飞行过程中,通道间存在严重的气动耦合。
工程设计上,通常把较小的耦合项作为随机干扰来处理,但当耦合影响较大时,容易使控制系统丧失稳定性,因此必须考虑通道间的耦合效应,并对其解耦。
近年来,随着控制理论的发展,多种解耦控制方法应运而生,如特征结构配置解耦、自校正解耦、线性二次型解耦、奇异摄动解耦、自适应解耦、智能解耦、H∞解耦,变结构解耦等,其中文献[4]采用多变量频域法,将耦合的MIMO 系统化为一系列的SISO 系统,再用经典频域法分别设计,实现了BTT 导弹自动驾驶仪的解耦,文献[5]采用输出反馈特征结构配置方法,合理配置了闭环系统的特征值、特征向量,求取输出反馈与前馈控制器,实现导弹三通道的解耦,文献[6]利用变结构控制和鲁棒控制,实现系统的动态解耦。
根据导弹在大攻角飞行过程中,导弹受到的参数不确定性和外界干扰等都非常大,采用一般的解耦方法很难保证控制系统的实时性要求,由于H∞混合灵敏度自身优点,这里提出了基于H∞混合灵敏度解耦控制器的设计方法。
H∞混合灵敏度解耦控制器是将理想的无耦合的闭环系统参与到混合灵敏度设计中去,从而达到解耦的目的。
在H∞混合灵敏度控制器设计中,需要进行权函数的选取,使其达到解耦目的。
该解耦控制方法的优点在于:由于H∞混合灵敏度控制器本身的优点,使得该解耦控制器具有较强的鲁棒稳定性和抗干扰能力。
2 大攻角再入导弹简化数学模型导弹的动力学特性由一组非线性、变系数的方程组描述。
由于存在弹性振动、液体晃动和发动机摇摆等因素的影响,该方程组非常复杂。
为了对导弹运动方程的各种分析、计算和导弹控制系统设计提供方便,本文采用小扰动简化措施。
考虑导弹刚体运动和弹性振动,假设偏航、滚动通道标准弹道参数为零,即得到以下基于小扰动假设的弹体运动方程。
冷连轧机张力系统H_∞混合灵敏度鲁棒控制器设计
方一鸣;陆金波;刘仙;王益群
【期刊名称】《系统仿真学报》
【年(卷),期】2004(16)8
【摘要】针对2030五机架冷连轧机四五机架间张力系统被控对象,利用H混合灵敏度鲁棒控制方法设计了其张力鲁棒控制器。
仿真研究结果及与常规PI控制效果的比较表明,所设计的张力鲁棒控制器对前后滑和外界干扰等不确定性具有更好的抑制作用,从而证明了所设计控制器的有效性。
【总页数】4页(P1812-1815)
【关键词】冷连轧机;张力控制;混合灵敏度;H∞鲁棒控制器;前后滑
【作者】方一鸣;陆金波;刘仙;王益群
【作者单位】燕山大学电气工程学院;燕山大学机械工程学院
【正文语种】中文
【中图分类】TP273
【相关文献】
1.冷连轧机液压系统的H∞混合灵敏度鲁棒控制器设计 [J], 付兴建;童朝南
2.冷连轧机张力控制系统鲁棒控制器设计 [J], 李国友
3.基于H∞混合灵敏度的冷连轧机多变量解耦鲁棒控制 [J], 李仲德;杨卫东
4.基于混合灵敏度的磁悬浮系统鲁棒控制器设计 [J], 薛鹏;韩家乐;张楠
5.汽车EPAS的混合灵敏度H_∞鲁棒控制器设计 [J], 余为清;刘举平;刘爱博
因版权原因,仅展示原文概要,查看原文内容请购买。
基于混合灵敏度设计的鲁棒迭代学习控制
许顺孝;杨富文
【期刊名称】《计算机辅助工程》
【年(卷),期】2006(15)3
【摘要】提出一种鲁棒迭代学习控制的设计方法.利用混合灵敏度设计方法,控制器满足一定鲁棒性条件时就可以直接获得收敛更新规则.此外,只要学习滤波函数满足一定条件,系统跟踪误差将显著降低.仿真结果表明该方法有效性较高.
【总页数】4页(P5-8)
【作者】许顺孝;杨富文
【作者单位】集美大学,信息工程学院,福建,厦门,361021;福州大学,电气工程与自动化学院,福建,福州,350002
【正文语种】中文
【中图分类】TP2
【相关文献】
1.基于H∞方法的鲁棒迭代学习控制设计 [J], 刘山;吴铁军
2.基于混合灵敏度优化的鲁棒特征结构配置 [J], 黄一敏;高正;王永
3.混合灵敏度问题的鲁棒H∞/LTR设计方法 [J], 翁正新;王广雄
4.基于LMI的小灵巧炸弹鲁棒H∞混合灵敏度BTT控制器设计 [J], 刘晓利;张志民;李银伢;戚国庆
5.基于灵敏度理论的μ/QFT鲁棒飞行控制器设计 [J], 栗鹏霞;安锦文
因版权原因,仅展示原文概要,查看原文内容请购买。
鲁棒D-稳定输出反馈H∞控制方法及其仿真
吕强;沐阿华
【期刊名称】《火力与指挥控制》
【年(卷),期】2007(032)008
【摘要】考虑了一类不确定系统的具有闭环极点约束的输出反馈H∞控制,运用基于线性矩阵不等式的方法(LMI),由二次D-稳定导出了鲁棒D-稳定的输出反馈控制器存在的充分条件和设计方法.该方法虽然具有一定的保守性,但求解方便有效,且易于扩展到多目标鲁棒控制.最后,仿真说明了该设计方法的正确性.
【总页数】4页(P75-78)
【作者】吕强;沐阿华
【作者单位】装甲兵工程学院,北京,100072;装甲兵工程学院,北京,100072
【正文语种】中文
【中图分类】TP273
【相关文献】
1.水下运载器多变量鲁棒输出反馈控制方法 [J], 朱康武;顾临怡;马新军;胥本涛
2.时变不确定系统的输出反馈鲁棒预测控制方法 [J], 王超;张胜修;张超;秦伟伟
3.T-S模糊系统的D-域性能约束鲁棒输出反馈控制 [J], 陶洪峰;胡寿松;李志宇
4.基于输出反馈的鲁棒容错D-稳定性分析 [J], 陈明;童朝南
5.Delta算子系统动态输出反馈D-稳定鲁棒协方差控制 [J], 肖民卿;曹长修;姚志强
因版权原因,仅展示原文概要,查看原文内容请购买。
clcclose allK=31.31b0=50.88b1=57.81Ag=[0 1;-b0 -b1]Bg=[0;1]Cg=[K 0]Dg=[0];[num,den]=ss2tf(Ag,Bg,Cg,Dg) Gs=tf(num,den)[z,p,k]=tf2zp(num,den)Gs1=zpk(z,p,k)%W1S=tf([0.2 3],[1 0.001])%W2S=tf([0.002],[1])%W3S=tf([0.002 0.00001],[1]) %W1S=tf([0.2 4],[1 0.002])%W2S=tf([0.003],[1])%W3S=tf([0.001 0.00001],[1]) %加权函数W1S=tf([0.2 10],[1 0.001])W2S=tf([0.001],[1])W3S=tf([0.001 0.00001],[1]) W3NUM=W3S.num{1,1};W3DEN=W3S.den{1,1};i=0;j=0;a=length(W3NUM);b=length(W3DEN);for c=1:1:aif W3NUM(c-i)~=0break;elseW3NUM(c-i)=[];i=i+1;endendfor d=1:1:bif W3DEN(d-j)~=0break;elseW3DEN(d-j)=[];j=j+1;endendGg=ss(Ag,Bg,Cg,Dg);[Aw1,Bw1,Cw1,Dw1]=tf2ss(W1S.num{1,1},W1S.den{1,1});[Aw2,Bw2,Cw2,Dw2]=tf2ss(W2S.num{1,1},W2S.den{1,1});if Polyorder(W3NUM)>Polyorder(W3DEN)[Q,R]=deconv(W3NUM,W3DEN)W3poly=Q[Aw3,Bw3,Cw3,Dw3]=tf2ss(R,W3DEN)else[Aw3,Bw3,Cw3,Dw3]=tf2ss(W3NUM,W3DEN)W3poly=[]endW1=[Aw1,Bw1;Cw1,Dw1]W2=[Aw2,Bw2;Cw2,Dw2]W3=[Aw3,Bw3;Cw3,Dw3][A,B1,B2,C1,C2,D11,D12,D21,D22]=augss(Ag,Bg,Cg,Dg,Aw1,Bw1,Cw1,Dw1,Aw2,Bw2,Cw2,Dw2,A w3,Bw3,Cw3,Dw3,W3poly)G=[A,B1,B2;C1,D11,D12;C2,D21,D22];[Acp,Bcp,Ccp,Dcp,Ac1,Bc1,Cc1,Dc1]=hinf(A,B1,B2,C1,C2,D11,D12,D21,D22)[knum,kden]=ss2tf(Acp,Bcp,Ccp,Dcp) %控制器的状态空间形式转换成传递函数形式K=tf(knum,kden) %控制器的传递函数[z,p,k]=tf2zp(knum,kden) %控制器的传递函数转换成零极点增益形式Kzpk=zpk(z,p,k)%{[gnum,gden]=ss2tf(Ag,Bg,Cg,Dg)Gs=tf(gnum,gden) %标称系统的传递函数P=nd2sys(gnum,gden,1) %标称系统的系统矩阵形式K1=nd2sys(knum,kden,1) %鲁棒控制器的系统矩阵形式[type,out,in,n]=minfo(P)I=eye(out)S=minv(madd(I,mmult(P,K1))) %灵敏度函数(1+GK)^-1 ,其中P和K1都是系统矩阵的形式T=msub(I,S)W1S1=nd2sys(W1S.num{1,1},W1S.den{1,1},1)INVW1S1=minv(W1S1) %加权函数W1的逆W1^-1INVW3S1=nd2sys(W3S.den{1,1},W3S.num{1,1},1) %加权函数W3的逆W3^-1w=logspace(-5,5,500)Sw=vsvd(frsp(S,w)) %灵敏度函数的频域响应的奇异值Tw=vsvd(frsp(T,w)) %补灵敏度函数的频域响应的奇异值INVW1S1w=vsvd(frsp(INVW1S1,w))INVW3S1w=vsvd(frsp(INVW3S1,w))figure(1)vplot('liv,lm',Sw,'r-',INVW1S1w,'b--')title('Singular values of sensivity function S and W1^{-1}')set(gca,'color','w')xlabel('Frequency(rad/sec)')ylabel('Amplitude')grid onfigure(2)vplot('liv,lm',Tw,'r-',INVW3S1w,'b--')title('Singular values of complementary sensivity function T and W3^{-1}')set(gca,'color','w')xlabel('Frequency(rad/sec)')ylabel('Amplitude')grid on%}w=logspace(-5,5,500);figure(3)bode(W1S,'-b',W3S,'-r',w)legend('W1','W3')title('Bode Diagram Of Weighed Function W1 and W3')grid on[Acg,Bcg,Ccg,Dcg]=series(Acp,Bcp,Ccp,Dcp,Ag,Bg,Cg,Dg)[As,Bs,Cs,Ds]=feedbk(Acg,Bcg,Ccg,Dcg,1) %灵敏度函数的状态空间(1+GK)^-1 [At,Bt,Ct,Dt]=feedbk(Acg,Bcg,Ccg,Dcg,2) %补灵敏度函数的状态空间GK(1+GK)^-1svs=sigma(As,Bs,Cs,Ds,w);svs=20*log10(svs);[Aw1i,Bw1i,Cw1i,Dw1i]=unpck(minv(pck(Aw1,Bw1,Cw1,Dw1)));svw1i=sigma(Aw1i,Bw1i,Cw1i,Dw1i,w);svw1i= 20*log10(svw1i);figure(4)semilogx(w,svw1i,'b--',w,svs,'r-')title('Singular values of sensivity function S and W1^{-1}')xlabel('Frequency(rad/sec)')ylabel('Amplitude(db)')legend('W1^{-1}','S');grid on[Aw3i,Bw3i,Cw3i,Dw3i]=tf2ss(W3S.den{1,1},W3S.num{1,1})svw3i=sigma(Aw3i,Bw3i,Cw3i,Dw3i,w);svw3i=20*log10(svw3i);svt=sigma(At,Bt,Ct,Dt,w);svt=20*log10(svt);figure(5)semilogx(w,svw3i,'b--',w,svt,'r-')title('Singular values of complementary sensivity function T and W3^{-1}')xlabel('Frequency(rad/sec)')ylabel('Amplitude(db)')legend('W3^{-1}','T');grid onsvtt=sigma(Ac1,Bc1,Cc1,Dc1,1,w);svtt=20*log10(svtt);figure(6)semilogx(w,svtt,'b-')xlabel('Frequency(rad/sec)')ylabel('Amplitude(db)')title('Frequency Characteristic of Closed-Loop System Twz') grid onsvcp=sigma(Acp,Bcp,Ccp,Dcp,1,w);svcp=20*log10(svcp);figure(7)semilogx(w,svcp,'b-')xlabel('Frequency(rad/sec)')ylabel('Amplitude(db)')title('Frequency Characteristic of H∞Controller')grid ont=[0:0.01:15];setvalue=8y=setvalue*step(At,Bt,Ct,Dt,1,t);figure(8)plot(t,y,'-b')axis([0,10,0,10])xlabel('Time(s)')ylabel('L/Min)')grid onfigure(9)bode(Ag,Bg,Cg,Dg,1,w)title('Bode Diagram Of The Plant')grid on[cnum,cden]=ss2tf(At,Bt,Ct,Dt,1)figure(10)step(Ag,Bg,Cg,Dg,1)grid on。