空时自适应处理中基于知识的训练样本选择策略
- 格式:pdf
- 大小:392.91 KB
- 文档页数:5

了解机器学习中的自适应学习方法自适应学习方法是机器学习领域中一种重要的技术,它可以帮助机器学习系统在实际应用中自动调整其学习策略,以适应环境、数据或任务的变化。
本文将介绍自适应学习方法的概念、原理和常见应用。
首先,我们来了解一下自适应学习方法的定义。
自适应学习是指机器学习系统可以根据当前环境、数据或任务的不断变化来自动调整其学习策略和模型,以提高学习性能和适应能力。
它可以帮助机器学习系统在面对新的数据、新的环境或新的任务时快速适应,而不需要重新训练或重新设计。
自适应学习方法的核心原理是动态调整学习策略和模型。
这种方法通过分析、监测和反馈机制来感知环境、数据或任务的变化,并根据这些变化调整学习算法的参数、模型结构或学习过程。
自适应学习可以分为几个方面的方法,包括增量学习、领域自适应、迁移学习和在线学习等。
首先,增量学习是一种逐步学习的方法,它可以在不重新训练整个模型的情况下,通过连续地接收和处理新数据来更新模型。
这种方法可以帮助机器学习系统在不断变化的环境中保持学习能力,同时避免了重新训练所带来的时间和计算资源的浪费。
其次,领域自适应是一种将已经学习到的知识应用于新领域的方法。
当模型在一个领域中训练好后,它可能在新的领域中失去准确性。
领域自适应方法通过学习领域之间的映射关系,将原有模型的知识迁移到新的领域上,以提高模型在新领域中的性能。
此外,迁移学习是一种通过借用已经学习到的知识来提高在新任务上的性能的方法。
在迁移学习中,已经学到的模型或特征被用于解决新的任务,以减少对标注数据的需求,并提高模型的泛化能力。
迁移学习可以帮助机器学习系统在数据稀缺或标注困难的情况下仍然取得好的性能。
最后,在线学习是一种在不断接收新样本的同时不断更新模型的方法。
在线学习方法适用于数据流式输入的情况,它可以帮助机器学习系统在实时应用中不断调整模型,以适应数据分布的变化。
在线学习方法通常采用增量学习的方式,通过不断更新模型来适应新样本的出现。


计算机视觉与图像识别考试(答案见尾页)一、选择题1. 计算机视觉中,哪种算法可以用于物体检测和定位?A. 卷积神经网络(CNN)B. 循环神经网络(RNN)C. 长短期记忆网络(LSTM)D. 支持向量机(SVM)2. 在计算机视觉中,以下哪种技术可以用于图像分割和目标识别?A. 主成分分析(PCA)B. 图像分割算法如阈值分割、区域生长等C. 阈值分割算法D. 生成对抗网络(GAN)3. 计算机视觉中的目标跟踪算法中,哪种算法是基于特征匹配的?A. K均值聚类B. 梯度下降法C. 基于特征的跟踪算法,如光流法、均值漂移等D.粒子滤波器4. 在计算机视觉中,哪种技术可以用于测量和识别图像中的距离和尺寸?A. 相机标定B. 三维重建C. 手眼协调(EHR)D. 图像分割5. 计算机视觉中的图像识别技术中,哪种技术可以用于识别图像中的物体和场景?A. 特征提取和匹配B. 深度学习中的卷积神经网络(CNN)C. 阈值分割D. 图像分割算法如区域生长等6. 在计算机视觉中,哪种技术可以用于从视频中提取关键帧?A. 光流法B. 运动估计C. 基于颜色的方法D. 人脸检测算法7. 计算机视觉中的图像恢复技术中,哪种技术可以用于去除图像中的噪声和干扰?A. 图像平滑滤波B. 图像锐化C. 图像变换D. 图像编码和解码8. 在计算机视觉中,哪种技术可以用于实现图像的超分辨率(提高图像的分辨率)?A. 双线性插值B. 高斯模糊C. 卷积神经网络(CNN)D. 实现图像超分辨率的技术通常不直接依赖于这些方法9. 计算机视觉中的场景理解技术中,哪种技术可以用于分析和理解图像中的内容及其上下文关系?A. 语义分割B. 实例分割C. 人脸识别D. 目标检测和识别10. 在计算机视觉中,哪种技术可以用于将二维图像转换为三维立体信息?A. 图像增强B. 图像变换C. 立体视觉技术D. 图像配准11. 计算机视觉中,以下哪个选项不是特征提取的方法?A. 边缘检测B. SIFT特征提取C. HOG特征提取D. K均值聚类12. 在图像识别中,以下哪个算法可以用于物体检测?A. SVMB. 随机森林C. YOLOD.深度学习中的Faster R-CNN13. 在计算机视觉中,以下哪种方法可以用于图像分割?A. K-means聚类B. 基于深度学习的方法,如FCNC. 图像处理技术,如阈值分割D. 阈值分割14. 计算机视觉中,以下哪个选项不是模式识别的方法?A. 支持向量机(SVM)B. 决策树C. 随机森林D. 神经网络15. 在图像识别中,以下哪种技术可以用于分类和回归?A. 支持向量机(SVM)B. 决策树C. 随机森林D. 深度学习中的神经网络16. 在计算机视觉中,以下哪种方法可以用于三维重建?A. 单目相机B. 双目相机C. 三目相机D. RGB-D相机17. 在图像识别中,以下哪种算法可以用于语义分割?A. 聚类算法,如K-meansB. 基于深度学习的方法,如U-NetC. 图像处理技术,如阈值分割D. 阈值分割18. 计算机视觉中,以下哪个选项不是图像恢复的方法?A. 伽马校正B. 直方图均衡化C. 噪点消除D. 局部修复19. 在计算机视觉中,以下哪种方法可以用于运动估计?A. 光流法B. 词袋模型(BoW)C. HOG特征D. 基于深度学习的方法,如Optical Flow20. 在图像识别中,以下哪种技术可以用于实时检测?A. 支持向量机(SVM)B. 决策树C. 随机森林D. 深度学习中的YOLO21. 计算机视觉中的图像处理技术主要包括哪些方法?A. 图像缩放B. 图像旋转C. 图像滤波D. 图像增强22. 在计算机视觉中,以下哪种算法可以用于目标检测和定位?A. K-means聚类算法B. 支持向量机(SVM)C. 霍夫变换D. 图像分割23. 计算机视觉中的深度学习方法有哪些?A. 卷积神经网络(CNN)B. 循环神经网络(RNN)C. 生成对抗网络(GAN)D. Transformer模型24. 在图像识别中,以下哪种技术可以提高识别准确率?A. 数据增强B. 激活函数C. 权重共享D. 正则化25. 计算机视觉中的目标跟踪算法主要有哪些?A. K均值算法B. 光流法C.均值漂移(Mean Shift)D. 模糊C均值聚类(FCM)26. 在图像处理中,以下哪种技术可以实现图像的锐化、去噪和增强?A. 图像平滑B. 图像锐化C. 图像增强D. 图像分割27. 计算机视觉中的特征提取和匹配技术在哪些应用场景中具有广泛应用?A. 自动驾驶B. 人脸识别C. 手写数字识别D. 医学影像分析28. 在计算机视觉中,以下哪种技术可以实现图像的立体匹配和三维重建?A. 形码技术B. 空时自适应处理(STAP)C. 协同式结构从运动(CSM)D. 图像缝合29. 计算机视觉中,哪种技术可以用于检测和识别图像中的物体?A. 特征匹配B. 深度学习C. 图像分割D.模式识别30. 在计算机视觉中,以下哪种方法可以用来对图像进行预处理?A. 清晰化B. 滤波C. 泛化D. 分类31. 计算机视觉中的目标检测与定位任务通常使用哪种算法?A. K-means聚类B. 支持向量机(SVM)C. 随机森林D. YOLO(You Only Look Once)32. 在计算机视觉中,以下哪种技术可以用于测量和跟踪物体的运动?A. 特征点检测B. 运动估计C. 图像恢复D. 图像增强33. 计算机视觉中的图像分割方法中,哪种方法可以实现基于像素值的精确分割?A. 阈值分割B. 区域生长C. 分水岭算法D. K-means聚类34. 在计算机视觉中,以下哪种技术可以用于识别图像中的文字?A. 文本检测B. 文本分类C. 文本生成D. 文本识别35. 计算机视觉中的深度学习模型中,哪种结构可以用于图像分类任务?A. 卷积神经网络(CNN)B. 循环神经网络(RNN)C. 长短期记忆网络(LSTM)D. 生成对抗网络(GAN)36. 在计算机视觉中,以下哪种技术可以用于从视频中提取关键帧?A. 光流法B. 目标检测C. 图像分割D. 视频稳定化37. 计算机视觉中的目标跟踪任务通常使用哪种算法?A. 霍夫变换B. 尺度不变特征变换(SIFT)C. 目标检测D. 运动估计38. 在计算机视觉中,以下哪种技术可以用于将图像中的物体转换为数字信号?A. 图像编码B. 图像解码C. 图像增强D. 图像滤波39. 计算机视觉中,以下哪个因素会影响到特征提取的准确性?A. 图像分辨率B. 图像亮度C. 图像噪声D. 图像角度40. 在人脸识别技术中,以下哪种算法被广泛应用?A. SVMB. K-均值聚类C. 深度学习D. 随机森林41. 在计算机视觉中,以下哪种方法可以用于测量距离?A. 卡尔·蔡司镜头B. 相位差方法C. 光学相机D. 超声波传感器42. 在图像识别中,以下哪种技术可以用于检测和识别物体?A. 深度学习B. 邻域搜索C. 阈值分割D. 图像滤波43. 在计算机视觉中,以下哪种方法可以用于图像恢复?A. 图像变换B. 图像编码和解码C. 图像增强D. 图像去噪44. 在人脸识别中,以下哪种算法可以实现活体检测?A. SVMB. K-均值聚类C. 深度学习D. 随机森林45. 在计算机视觉中,以下哪种技术可以用于视频分析?A. 图像处理B. 语音识别C. 自然语言处理D. 机器学习46. 在图像识别中,以下哪种技术可以用于分类和识别图像中的对象?A. 特征匹配B. 图像分割C. 图像编码和解码D. 深度学习47. 在计算机视觉中,以下哪种方法可以用于目标跟踪?A. 深度学习B. 光流法C. 匹配滤波器D. 规范化方法48. 在图像识别中,以下哪种技术可以用于场景理解?A. 图像分类B. 图像分割C. 基于知识的方法D. 深度学习二、问答题1. 计算机视觉中,什么是特征提取?请简述其特征提取的主要步骤。

雷达空时自适应信号处理雷达是一种利用电磁波探测物体的设备。
人们常常将雷达和航空飞行紧密联系在一起,它可以帮助人们掌握飞行距离和方向,以及确定任何在路径上的物体或障碍物。
雷达技术的发展对军事、安全、航空航天、气象等领域的发展有着巨大的推动作用。
但是,雷达在探测过程中会受到许多干扰,比如天气的影响、树木、建筑物等障碍物的影响、以及人造干扰等。
这些因素都会影响雷达的信号,导致信噪比变低,进而影响雷达的探测精度和灵敏度。
为了提高雷达的准确性和可靠性,人们开发了各种自适应信号处理技术,其中空时自适应信号处理是其中的一种。
空时自适应信号处理技术是一种在雷达信号处理中应用广泛的自适应算法。
这个技术是基于信号处理、数字信号处理和统计学方法的原理,利用雷达自身接收信号的特性,在数据处理方面进行优化,通过相应的算法,强化雷达自身的抗干扰能力,优化探测精度,达到更高的探测效率。
这一技术的优点是可以有效地降低各种干扰,提高雷达探测的灵敏度和准确性,从而提升雷达整体的性能。
具体而言,空时自适应信号处理技术主要是解决雷达接收信号常常受到杂波干扰的问题。
首先,这种技术要求将雷达接收到的信号分成空域和时间域两个方面进行处理。
时间域处理主要针对雷达信号的抗干扰能力,可以采用滤波器、预处理等多种方式,对雷达信号进行整体优化。
空域处理则主要关注雷达接收到的干扰信号的分离和消除,主要通过干扰源的分离、噪声的降噪、杂波的抑制等技术手段实现。
在空时自适应信号处理技术中,最常见的技术手段是LMS算法和NLMS算法。
这些算法使用反馈系统并自适应地调整权重系数,使系统对于不同条件下的干扰能够产生有效的抵消效果,从而改善雷达信号的质量。
同时,这些算法能够提高雷达系统的自适应性和动态范围,使其能够适应不同情况下的信号处理需求。
总之,空时自适应信号处理技术的应用为雷达技术的发展提供了一个新的思路,有望改善雷达信号的探测精度和可靠性。
未来,随着技术的不断提升和新的技术需求的出现,这一技术将会在雷达领域中发挥越来越重要的作用。

基于环境动态感知的空时自适应处理佚名【摘要】In heterogeneous clutter environments, Space-Time Adaptive Processing (STAP) shows notable performance degradation for lacking sufficient Independent Identically Distributed (IID) training samples. To solve this problem, a STAP approach is proposed based on dynamic environment sensing. With transmitted signal being orthogonal waveform, the clutter information is achieved. Then the clutter information and platform parameters are used and a clutter covariance matrix at future time is obtained incorporating system parameters. Finally, the space-time processor can be built based on the combination of the predicted clutter covariance matrix and the sample covariance matrix. The simulation results demonstrate that the new approach still can achieve better clutter suppression performance under circumstance of inaccurate environmental knowledge.%在非均匀环境中,缺乏独立同分布的训练样本会使空时自适应处理(Space-Time Adaptive Processing, STAP)算法性能严重下降。
多入多出(MIMO)系统的空时处理技术及调制方式一.介绍随着实时多媒体通信、高速INTERNET接入等数据业务的发展,提高通信系统的速率和频带利用率已成为急待解决的问题。
在无线通信系统中,提高频带利用率的方法主要有智能天线技术、MIMO技术、多载波调制及自适应编码调制技术等。
其中,MIMO技术由于能有效利用多径衰落,巨大地提高系统容量和频带利用率而成为目前国内外通信研究的热点。
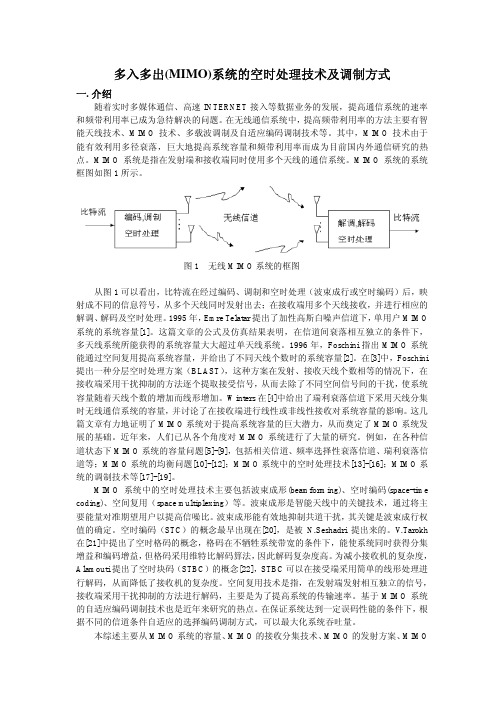
MIMO系统是指在发射端和接收端同时使用多个天线的通信系统。
MIMO系统的系统框图如图1所示。
图1 无线MIMO系统的框图从图1可以看出,比特流在经过编码、调制和空时处理(波束成行或空时编码)后,映射成不同的信息符号,从多个天线同时发射出去;在接收端用多个天线接收,并进行相应的解调、解码及空时处理。
1995年,Emre Telatar提出了加性高斯白噪声信道下,单用户MIMO 系统的系统容量[1]。
这篇文章的公式及仿真结果表明,在信道间衰落相互独立的条件下,多天线系统所能获得的系统容量大大超过单天线系统。
1996年,Foschini指出MIMO系统能通过空间复用提高系统容量,并给出了不同天线个数时的系统容量[2]。
在[3]中,Foschini 提出一种分层空时处理方案(BLAST),这种方案在发射、接收天线个数相等的情况下,在接收端采用干扰抑制的方法逐个提取接受信号,从而去除了不同空间信号间的干扰,使系统容量随着天线个数的增加而线形增加。
Winters在[4]中给出了瑞利衰落信道下采用天线分集时无线通信系统的容量,并讨论了在接收端进行线性或非线性接收对系统容量的影响。
这几篇文章有力地证明了MIMO系统对于提高系统容量的巨大潜力,从而奠定了MIMO系统发展的基础。
近年来,人们已从各个角度对MIMO系统进行了大量的研究。
例如,在各种信道状态下MIMO系统的容量问题[5]-[9],包括相关信道、频率选择性衰落信道、瑞利衰落信道等;MIMO系统的均衡问题[10]-[12];MIMO系统中的空时处理技术[13]-[16];MIMO系统的调制技术等[17]-[19]。
基于海杂波稀疏性与非均匀度的样本挑选方法韩超垒;杨志伟;田敏;孙永岩;曾操【摘要】针对预警雷达对海监视面临海杂波分布非均匀与杂波样本受目标污染,导致自适应杂波抑制处理性能恶化和目标能量损失的问题,提出了一种基于海杂波稀疏性与非均匀度的样本挑选方法.该方法将目标的导向约束与广义内积样本挑选方法结合,先利用海杂波在空时二维平面上的稀疏分布特性,根据海杂波与目标空时二维分布差异剔除被目标污染的样本,再利用广义内积准则衡量海杂波分布的非均匀程度,并获取均匀样本,以提高杂波协方差矩阵的估计精度.仿真结果表明:所提方法能在提高杂波抑制性能的同时,减小目标信号能量损失.该方法可广泛应用于海面预警监视雷达系统.【期刊名称】《上海航天》【年(卷),期】2018(035)005【总页数】7页(P25-31)【关键词】空时自适应处理;样本挑选;非均匀杂波;样本污染;稀疏性【作者】韩超垒;杨志伟;田敏;孙永岩;曾操【作者单位】西安电子科技大学雷达信号处理国家重点实验室,陕西西安710071;西安电子科技大学雷达信号处理国家重点实验室,陕西西安710071;西安电子科技大学雷达信号处理国家重点实验室,陕西西安710071;上海卫星工程研究所,上海200240;西安电子科技大学雷达信号处理国家重点实验室,陕西西安710071【正文语种】中文【中图分类】TN959.730 引言运动平台雷达对海探测在战态感知、预警监视、渔业管理、海面救援等方面具有重要地位。
不同于地面,海面会随时间波动起伏,海杂波同时面临空间和时间去相关问题。
另外,平台运动将导致海杂波多普勒谱展宽,此时慢速运动目标不可避免地会被杂波淹没,因此,海杂波抑制成为提升慢速运动目标检测性能的有效手段。
BRENNAN等[1]首次提出了空时自适应处理技术,该技术能大幅提升运动平台雷达的海杂波抑制性能。
但是,全维空时自适应处理系统自由度大,计算复杂度高。
另外,实际场景中杂波呈非均匀非平稳分布,训练样本不满足独立同分布(IID)的条件,这会造成对杂波协方差矩阵估计不准确,进而导致空时自适应处理系统的杂波抑制性能严重下降。
空时自适应处理
空时自适应处理是一种新型的信号处理技术,它主要应用于航空电子、地球物理勘探、天文学等领域。
空时自适应处理技术能够处理高维度的数据,对于多通道、多源信号的处
理十分有效,能够在处理带干扰信号时有很好的效果。
空时自适应处理技术主要包括以下几个方面的内容:
1. 空时滤波:空时滤波是将多通道或多源信号进行分离或去除噪声的一种方法,其
主要思想是利用传感器之间的关联性,将信号变换到一个新的空间中,然后再进行滤波。
空时滤波能够有效地消除多通道或多源信号中的干扰,提高信噪比,使得更准确的提取出
所需的信号。
2. 空时估计:空时估计是通过对多通道或多源信号进行分析,得出信号的方向、频
率等信息的一种方法。
其主要思想是通过传感器之间的差别来计算信号的角度,从而得到
观测信号的信息。
空时估计通常用于信号处理、通信、雷达等领域。
3. 自适应滤波:自适应滤波是通过信号的特征来动态调整滤波器的参数,并根据结
果的反馈信息来进一步调整滤波器的参数。
自适应滤波能够处理时间变化的信号,具有很
好的自适应性和稳定性,常用于通信、控制、音频、视频等领域中。
空时上下文模型下基于多种特征融合的监控目标跟踪杨洋【摘要】With the development of video processing and network technology,video surveillance applications gradually penetrated into every aspect of people's daily activities.How to design a object tracking technique with high precision and robustness is still a hotspot and difficulty in current research,an improved spatio-temporal context tracking algorithm based on multi-feature fusion and adaptive model updating is proposed.Based on the spatio-tempora context tracking algorithm,our proposed algorithm integrates multi-feature informations into the spatio-tempora context model.Since the complementary characteristics of multiple features,it is possible to overcome the disadvantages of the single feature and improve the anti-jamming ability.In addition,this paper also proposes an adaptive learning factor strategy to enhance the generalization ability of the model.The selected feature set isrobust,including color,gradient,direction,point feature,and so on.There are 19 features in t otal,where the size of the sub block is 11 × 11,the Gauss kernel variance is 2,the parameter of loss term is 0.005,and the other parameters are consistent with the STC.A large number of simulation results show that the tracking performance of our proposed algorithm outperforms the existing KCF,MFC and STC tracking algorithm,and has stronger robustness and anti-jamming capability for complex scenes.%随着视频处理技术和网络技术的发展,视频监控应用逐渐渗透到了人们日常活动中的方方面面,如何设计实现精度高、鲁棒性好的目标跟踪技术仍然是当今研究的热点及难点;在工程应用实践的基础上,提出一多特征融合与自适应模型更新的空时上下文目标跟踪算法,通过将丰富多样的多特征信息整合到空时上下文模型中;由于多特征具有互补特性,可以克服单一特征对目标区域描述不足的缺陷,提升算法的抗干扰能力;同时,也提出了一种自适应学习因子策略,增强了模型的泛化能力;选取的特征集是鲁棒的,包括了颜色、梯度、方向、点特征等总共19个特征,其中子块大小是11×11,高斯核方差为2,损失项正则参数为0.005,其余参数设置与STC保持一致;大量的仿真实验结果表明所提出的改进算法在跟踪中心误差指标上比现有的KCF,MFC和STC跟踪算法分别提高了5.4%,2.1%和3.6%,对复杂的跟踪场景具有更强的鲁棒性与抗干扰能力.【期刊名称】《计算机测量与控制》【年(卷),期】2018(026)006【总页数】4页(P192-195)【关键词】目标跟踪;多特征融合;自适应;空时模型;泛化能力;互补特性【作者】杨洋【作者单位】华南理工大学土木与交通学院,广州 510640【正文语种】中文【中图分类】TP3910 引言伴随着信号处理技术和数字技术的成熟,视频监控系统在数字化、网络化、智能化和集成化方向飞速发展,整个视频监控行业已经快速进入了智能监控的时代。
相控阵雷达空时自适应处理相控阵雷达是一种发射与接收都采用相位调控技术的雷达,其具有发射功率高、目标识别能力强、抗干扰能力强等优点。
随着雷达技术的不断发展,相控阵雷达在军事和民用领域中的应用越来越广泛。
相控阵雷达的空时自适应处理技术是相控阵雷达中的一项重要技术,它通过实时自适应校正信号的相位和幅度来提高雷达的功率和性能,适应复杂干扰和复杂信号环境。
相控阵雷达的空时自适应处理技术基于雷达接收到的信号,采用自适应滤波算法对信号进行处理,以提高信噪比和瞬时动态范围,以便更好地识别目标。
该技术主要包括以下几个方面:1. 算法基本原理空时自适应处理技术利用自适应滤波器对输入信号进行实时处理,以最大化滤波器响应的信号功率,同时最小化非信号功率以减小噪声干扰。
具体来说,该算法通过计算输入信号的自相关矩阵,得到信号的统计特性,进而实现自适应滤波器系数的调整,以提高目标信号的信噪比。
2. 自适应滤波器结构自适应滤波器结构包括一个输入端和一个输出端,其内部由多个加权系数和延迟单元组成。
这些加权系数是由自适应算法计算得出的,用来在滤波器中加权输入信号的不同分量。
输入信号通过滤波器后,产生一个输出信号,该输出信号的功率被最大化。
通过适当的加权策略,自适应滤波器可以对目标信号的不同特征进行处理,得到更加准确的目标信号。
3. 自适应算法空时自适应处理算法通常采用LMS(最小均方)算法或NLMS(归一化最小均方)算法。
LMS算法的特点是快速收敛和较小的计算量,但其在处理非稳态信号时可能出现饱和现象。
NLMS算法则能够避免饱和现象,但其收敛速度较慢。
4. 应用范围空时自适应处理技术广泛应用于雷达、通信等系统中,特别是在噪声干扰严重、信道复杂的情况下,能够大大提高系统的性能和可靠性。
在相控阵雷达中,空时自适应处理技术能够帮助系统更好地适应各种复杂的雷达信号环境,提高雷达的目标检测和跟踪能力,有助于提升雷达系统的实用性和可靠性。
综上所述,相控阵雷达空时自适应处理技术是一项十分重要的雷达技术,其能够实现即时信号的自适应校正,并利用自适应滤波器抑制干扰和噪声,从而提高雷达的性能和可靠性。