2017年超级轨迹赛道具搭建手册
- 格式:pdf
- 大小:1.20 MB
- 文档页数:6
2021年超级轨迹赛项竞赛规则(线下版)1. 参赛范围1.1参赛组别:小学组、初中组、高中组。
1.2参赛人数:每队一名学生,一台机器人。
1.3指导教师:每队至多报一名指导教师。
2.竞赛主题20201中小学电脑制作活动超级轨迹赛主题为“无人驾驶”无人驾驶是现在智能汽车的一项重要技术,是集自动控制、体系结构、人工智能、视觉计算等众多技术于一体,通过利用车载传感系统和车载计算机以及卫星 GPS 联合计算控制为主,自动规划行车路线并控制车辆到达预定目标。
通常,无人驾驶智能汽车具备各种车载传感器,如激光雷达传感器,视觉系统和其他辅助传感器,利用这些设备,来感知车辆周围环境,并根据感知所获得的道路、车辆位置和障碍物信息,控制车辆的转向和速度,从而使车辆能够安全、可靠地在道路上行驶,甚至通过结合人工智能算法,可以做到给道路上的事物进行分类并判断其状态和行为,可以做到从“驾驶经验”中训练好的模型中“推断”事物可能会发生的状态和行为。
无人驾驶旨在利用一个虚拟的城市道路环境,通过模拟汽车在城市道路驾驶过程中可能发生的各种情况以及交通事件,训练学员掌握交通安全,了解交通标识信息,同时能够针对性地设计合适任务所要求的智能无人车,进行应对和编程,使机器人能在无人工干预下自主运行程序完成各类行车操作和事件处理动作,以加深学员对无人驾驶技术的了解,培养学员的创新科技探索能力。
在模拟道路中设置多个得分标志物和突发事件,要求机器人在规定的时间内从模拟道路的起点行驶至终点,并自主完成对应的处理动作,完成得分动作越多、用时越少,最终得分越高。
在比赛中,学员除了需要掌握机器人相关知识和技能的综合运用,还需要考虑在无人驾驶交通规则下,如何面对一个复杂多任务的项目,在有限时间内通过合理高效的策略取得最好的成绩。
3.竞赛场地竞赛场地由场地图纸和场地道具组成。
比赛场地采用彩色喷绘布,尺寸2m*2m。
场地上从起点到终点,有20cm宽的交通路线,路中有20mm宽的引导线。
课题:驱动前行
授课老师:汤军伟时间:
一、教学目标:
1、知识目标:了解超级轨迹赛相关知识。
2、技能目标:学员认识小车零部件,并自己动手拼装,完成小车的基本调试
3、情感态度价值观:激发学生对于机器人学习的兴趣以及爱好。
二、教学重点:
主要对小车组成零部件进行认识,让学生自己动手拼装小车,实现小车运行三、教学难点:
马达与控制器之间的连接
三、教学准备:
中鸣智能教育机器人套装——科学风暴Ⅱ
五、教学流程:
1、热身与问候
调节气氛,通过视频吸引学生的注意,让学生把视点放到机器人上,并且展开思考
2、新知导入
首先简单介绍一下超级轨迹赛事,并播放比赛视频,通过提问,将学生引入车的组成部件中
3、探究活动
了解小车的组成结构,积木的分类,控制器,马达,传感器的种类
4、实践
根据提示(PPT图片)自己动手组装小车
5、巩固拓展
可以动手试试去调整一下我们的马达的速度,并想办法将马达的控制器连接更稳固
6、归纳总结
本节课通过了解小车的构造,并完成了拼装,完成了马达的调试
六、教师后记:。
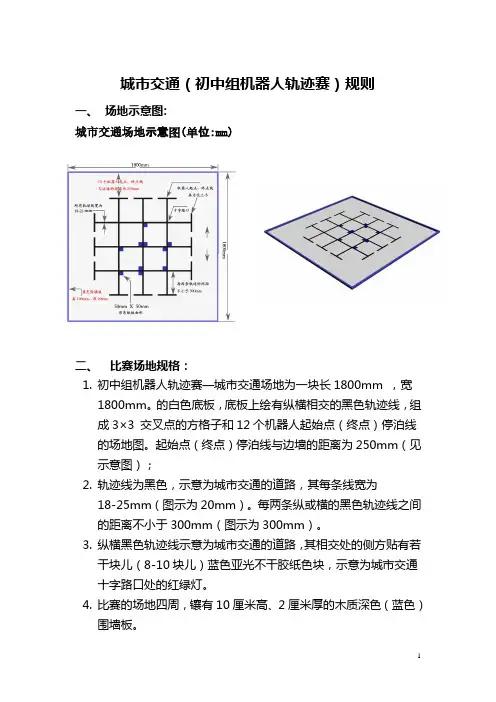
城市交通(初中组机器人轨迹赛)规则一、场地示意图:城市交通场地示意图(单位:mm)二、比赛场地规格:1.初中组机器人轨迹赛—城市交通场地为一块长1800mm ,宽1800mm。
的白色底板,底板上绘有纵横相交的黑色轨迹线,组成3×3 交叉点的方格子和12个机器人起始点(终点)停泊线的场地图。
起始点(终点)停泊线与边墙的距离为250mm(见示意图);2.轨迹线为黑色,示意为城市交通的道路,其每条线宽为18-25mm(图示为20mm)。
每两条纵或横的黑色轨迹线之间的距离不小于300mm(图示为300mm)。
3.纵横黑色轨迹线示意为城市交通的道路,其相交处的侧方贴有若干块儿(8-10块儿)蓝色亚光不干胶纸色块,示意为城市交通十字路口处的红绿灯。
4.比赛的场地四周,镶有10厘米高、2厘米厚的木质深色(蓝色)围墙板。
5.正式竞赛场地图,将在全国比赛当天公布。
三、机器人设计与器材要求:1、使用本届比赛限的教育机器人套装器材设计、搭建、制作机器人,但机器人的创意、设计、结构搭建与程序设计必须由学生独立完成。
并体现他们的创造性与创新精神。
机器人部件之间的衔接可以使用胶水、螺丝钉等材料固定。
2、机器人体积大小、重量不限。
3、电子器件:使用一个可编程处理器,传感器数量不能超过3个,电机不能超过2个。
4、搭建机器人的“积木块”不限。
本届竞赛要求参赛者对他们的机器人进行个性化的装饰。
5、电池自备,输入电压不超过9V。
6、各代表队须自备电脑和竞赛所需的机器人套装器材并带齐常用工具、电源接线板、转换插头等。
四、任务要求:1、设计制作一个机器人,从指定的起始区域出发,沿着轨迹线运动,遇有交叉点时,则根据交叉点处的色块(红绿灯)位置,决定直走或是转弯的方向,并在3分钟时间内到达规定的终点区域。
2、机器人在起始线摆放的位置,为其身体的任何一部分不得超过起始边线。
3、机器人必须沿着轨迹线,按照“红绿灯”指示运行。
A 、行至交叉路口的着色区时,机器人必须执行下列图表中的动作规定;B 、机器人必须忽略交叉线后面的色块。
贵州省第四届青少年学生机器人竞赛超级轨迹赛竞赛规则一、竞赛任务比赛中,机器人从起点出发,开启征程。
在征途上,将会遇到各种路况,有急转的弯道、有颠簸的碎石路、有狭窄的山洞、有湍急的河流等等,机器人需要稳定快捷的征服各种情况,最终到达彼岸的终点!二、竞赛细则1、比赛时间和计分方法比赛共分两轮,单轮比赛时间为2分钟。
单轮的比赛分=完成任务的分数+时间加成分数。
竞赛成绩统计时,取两轮的总和为最终比赛成绩。
2、队伍顺序单轮比赛中,上一个队伍开始比赛时,会通知下一个队伍上场准备。
在规定时间内(裁判通知后的1分钟内)没有准备好的机器人的队伍将丧失本轮比赛机会,但不影响另一轮的比赛。
3、赛前搭建与调试参赛队伍机器人可预先搭建和编程,比赛开始后有2小时编程调试时间。
两轮比赛开始之间会预留30分钟左右调试时间,具体以现场安排为准。
每轮比赛开始前,机器人由裁判封存,参赛队员未经允许不得再接触机器人,否则将被取消参赛资格。
4、场地比赛场地采用彩色喷绘布,尺寸2m*5m。
从场地上的起点区域出发,有一条2.0cm至2.5cm宽的黑色轨迹线一直延伸到终点区域。
此条黑色轨迹线由起止线、直线、虚线、折线、圆弧等组成,具体组成方式以组委会赛前公布的为准。
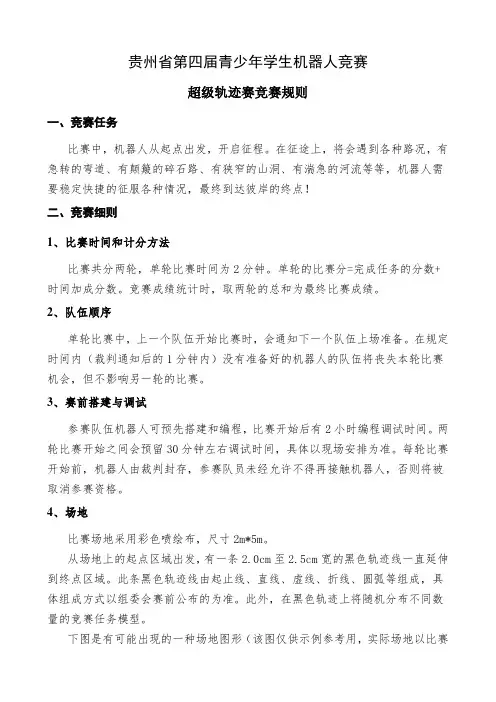
此外,在黑色轨迹上将随机分布不同数量的竞赛任务模型。
下图是有可能出现的一种场地图形(该图仅供示例参考用,实际场地以比赛公布为准):图1.竞赛场地示意图5、机器人规格和材料标准(1)尺寸:机器人在起点区的最大尺寸为25cm ×25cm ×15cm (长×宽×高),离开出发区后,机器人的机构可以自行伸展,但必需确保通过终点区时的尺寸不大于25cm ×25cm ×15cm (长×宽×高),以保证通过终点区的计时装置。
(2)控制器:每台机器人只允许使用一个控制器(3)电机数量不超过3个(包含3个)。
(4)传感器:机器人禁止使用集成类传感器,如循迹卡、灰度卡等。

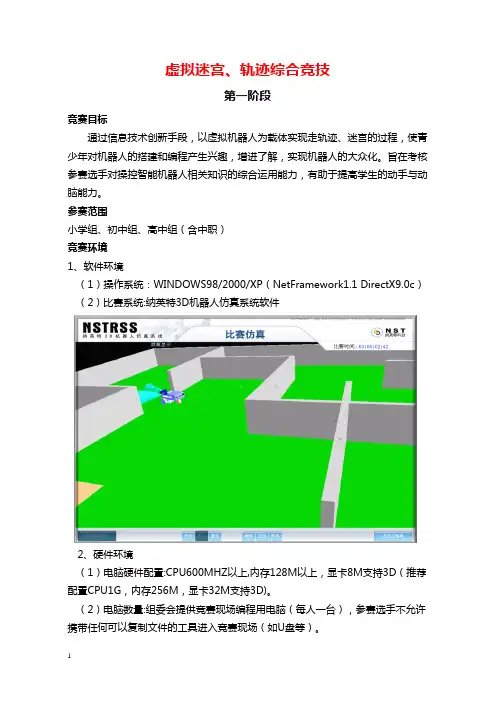
虚拟迷宫、轨迹综合竞技第一阶段竞赛目标通过信息技术创新手段,以虚拟机器人为载体实现走轨迹、迷宫的过程,使青少年对机器人的搭建和编程产生兴趣,增进了解,实现机器人的大众化。
旨在考核参赛选手对操控智能机器人相关知识的综合运用能力,有助于提高学生的动手与动脑能力。
参赛范围小学组、初中组、高中组(含中职)竞赛环境1、软件环境(1)操作系统:WINDOWS98/2000/XP(NetFramework1.1 DirectX9.0c)(2)比赛系统:纳英特3D机器人仿真系统软件2、硬件环境(1)电脑硬件配臵:CPU600MHZ以上,内存128M以上,显卡8M支持3D(推荐配臵CPU1G,内存256M,显卡32M支持3D)。
(2)电脑数量:组委会提供竞赛现场编程用电脑(每人一台),参赛选手不允许携带任何可以复制文件的工具进入竞赛现场(如U盘等)。
竞赛过程在规定时间内参赛选手独立自主在计算机上模拟完成机器人的搭建、编程及调试,然后在计算机上模拟实现仿真机器人自主走轨迹和走迷宫到终点的全部过程。
比赛场地1、200厘米×200厘米的场地由一段轨迹和迷宫组成;轨迹由线宽2cm 的黑线和一段河流组成,迷宫由若干白色障碍块(长:20厘米、宽:20厘米、厚:2厘米)组成,四周边框、障碍块为白色。
2、迷宫入口宽20cm ,开始时迷宫活动门是被封闭的,机器人成功越过河流,迷宫活动门会自动打开。
3、程序不允许使用时间延时法或类似时间延时法,可使用红外传感器走迷宫,灰度传感器走轨迹和指南针传感器转弯。
(场地参考图,有可能变化)参赛队伍每支参赛队伍限2名选手。
比赛终止1、裁判宣布入场后1分钟内,参赛队员没有入场。
2、裁判宣布停止调试,参赛队员未及时上交程序。
终点30分3、比赛过程中队员出现严重犯规事件。
比赛结束1、机器人完成规定的任务。
2、规定的比赛时间用完。
3、参赛选手主动宣布放弃。
比赛时长(1)机器人搭建、编程及调试:60分钟/组别(2)完成任务:3分钟/组别评分标准1、规定用时内完成任务,成绩以用时较少的一次为准。
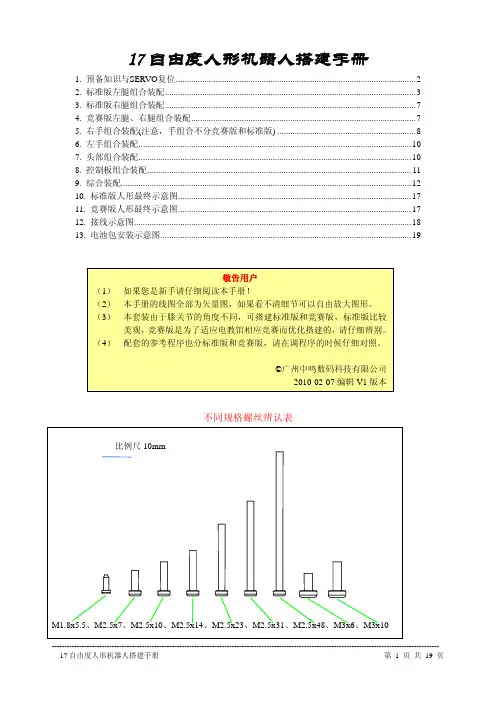
17自由度人形机器人搭建手册1. 预备知识与SERVO复位 (2)2. 标准版左腿组合装配 (3)3. 标准版右腿组合装配 (7)4. 竞赛版左腿、右腿组合装配 (7)5. 右手组合装配(注意,手组合不分竞赛版和标准版) (8)6. 左手组合装配 (10)7. 头部组合装配 (10)8. 控制板组合装配 (11)9. 综合装配 (12)10. 标准版人形最终示意图 (17)11. 竞赛版人形最终示意图 (17)12. 接线示意图 (18)13. 电池包安装示意图 (19)不同规格螺丝辨认表比例尺10mmM1.8x5.5、M2.5x7、M2.5x10、M2.5x14、M2.5x23、M2.5x31、M2.5x48、M3x6、M3x101. 预备知识与SERVO复位(1)认识SERVO的旋转范围SERVO转轴的理论转动范围是0°~180°参考下图,从上往下看,把十字转盘卡在SERVO上,假设顺时针扭动转轴,扭到卡住的位置就是0度, 假如逆时针扭动转轴,扭到卡住的位置就是180度,中间的位置就是90度,也就是说SERVO定义角度是从逆时针逐渐增大的,理想的0度位置是水平向右的,理想的90度位置是垂直向上的,理想的180度位置是水平向左的.(2)如何找到SERVO转轴的90度位置在安装SERVO转盘之前,我们必须找到SERVO的90度位置,由于SERVO表面没有刻度,用手工的方法找90度位置是非常困难的,在这里有个简单的方法,操作方法见下图.我们把这个过程称作为90度复位.1)把电池包的插针插在控制板的电源插座上.2)把SERVO插在控制板的任意一个控制端口上.(注意深色线要插在G线(地线)那一排插针.)3)打开控制板上的电源开关.(3)把所有SERVO进行90度复位在进行装配之前,请参照以上步骤,把所有的SERVO进行90度复位,注意这个工作是必须的!!!注意:本手册所说的SERVO也可以叫伺服马达。

超级轨迹赛程序说明(2个光感)1.子程序说明1.1Line()图标:功能:两个光感走线参数:speed:机器人直走的速度;speed1:小调整的速度;speed2:大调整的速度;gray:光电传感器阀值,即是小于此值,机器人认为是检测到黑线。
1.2LineTime()图标:功能:沿着黑线走一段时间参数:time:沿着黑线走的时间;gray:光电传感器阀值,即是小于此值,机器人认为是检测到黑线。
1.3Turn()图标:功能:转弯参数:leftSpeed:左马达的速度,小于0表示马达往后转,大于表示马达往前转,范围:-100~100;RightSpeed:右马达的速度,小于0表示马达往后转,大于表示马达往前转,范围:-100~100;time:预转弯的时间,此作用是首先让马达先转一定的时间,不检测黑线;sensor:检测到黑线的传感器号数,即是转到第几个光电传感器“看到”黑线;STime:刹车时间;gray:光电传感器阀值,即是小于此值,机器人认为是检测到黑线。
1.4MlineTime()图标:功能:在规定的时间内,用伺服马达走直线,如果在有效的时间内,机器人检测到黑线了,则也完成了此走直线功能。
参数:Speed :马达的速度Time :往前走的时间Gray :光电传感器阀值,如果机器人在有效时间内检测到黑线,则会跳出直走程序 Sensor :检测到黑线的光电传感器号数。
1.5TurnQuan() 图标:功能:定点转角度(这个角度是指编码器的读数),即是一个马达动,另一个马达不动 参数:leftSpeed :左马达速度rightSpeed :右马达速度LR :往左转还是往右转,为1往左转,为2往右转Quan :编码盘的圈数,这个可以到E2RCU 的“内置测试”菜单的“编码器”中查看2.调试步骤2.1搭建搭建步骤请看搭建手册,在搭建的过程中请注意机器人的重心,要确保机器人的重心在两个马达上,还有轮胎的摩擦力。
2017年金桥碧云国际关爱运动会开幕式暨8公里活力跑&3公里欢乐跑组织实施方案一、活动背景:金桥碧云国际社区主题长跑活动是金桥开发区一项具有15年历史和较大社会影响力的品牌赛事,凭借金桥碧云社区独有的文化底蕴,海纳百川的胸怀,吸引着越来越多的长跑爱好者,为全民健身运动搭建了平台荣获上海市十大群众体育活动品牌之一。
二、活动概要:●活动名称:2017金桥碧云国际关爱运动会开幕式暨8公里活力跑和3公里欢乐跑●活动时间:2017年5月20日(周六)07:00-12:00(含集结时间)●活动地点:1)、长跑路线:在金桥碧云国际社区道路(见后续路线图)2)、开幕式/颁奖仪式:碧云国际社区阳光大球场(蓝天路633号)●报名方式:上海浦东碧云文化体育发展中心(民非组织)官方微信●报名费用:8公里活力跑人民币100元/人(含参赛包、保险)3公里欢乐跑人民币60元/人(含参赛包、保险)●比赛奖项:⏹8公里活力跑:男女TOP现金奖励RMB3000、RMB2000、RMB1000、RMB500;男女5-8名奖金为RMB200;完赛运动员均发放完赛奖牌、完赛包。
⏹3公里欢乐跑:完赛奖牌(不计名次)●比赛路线8公里欢乐跑路线:阳光大球场(起点)—蓝桉路—碧云路—红枫路—锦绣东路—云山路—碧云路—红枫路—明月路—云山路—碧云路—蓝桉路(碧云路南口)(终点)3公里欢乐跑路线:阳光大球场(起点)—蓝桉路—碧云路—红枫路—明月路—云山路—碧云路—蓝桉路(碧云路南口)(终点)三、整体流程安排:07:00-8:30 活动准备、8公里运动员集合8:30-9:10 开幕式9:10-10:30 8公里活力跑比赛10:30-10:45 颁奖仪式/3公里欢乐跑运动员集合11:00-11:30 3公里欢乐跑比赛11:30-12:00 运动员领取完赛礼离开。
2017年山东省职业院校技能大赛高职组自动化生产线安装与调试赛项任务书一、竞赛设备及工艺过程描述YL-335B自动化生产线由供料、输送、装配、加工和分拣等5个工作单元组成,其中供料和输送单元、装配单元、加工单元和分拣单元各用一台PLC承担其控制任务,4台PLC之间通过RS485串行通信的方式实现互连,系统主令工作信号由连接到主站(供料-输送站)PLC的触摸屏人机界面提供,主站与各从站之间通过网络交换信息。
构成分布式的控制系统。
自动化生产线的主要工作目标是把装配单元料仓内的白色、黑色或金色的小圆柱芯件嵌入到供料单元提供的待装配工件(白色或黑色塑料)中,压紧加工后送往分拣单元,分拣单元按照两位配料员设定完后的配料品种和数量及出料顺序,将物料送到设定的配料工位。
如图1是已完成装配和压紧加工的成品工件,它们是A产品(白塑料外壳黑芯)、B产品(白塑料外壳金属芯)、C产品(黑塑料外壳白芯)、D产品(黑塑料外壳金属芯)。
图1 已完成装配和加工的成品工件二、需要完成的工作任务(一)自动化生产线设备部件安装、气路连接及调整根据供料状况和工作目标要求,YL-335B 自动化生产线各工作单元在工作台面上布局如附页图01所示。
请首先完成生产线各工作单元的部分装配工作,然后把这些工作单元安装在 YL-335B 工作桌面上,要求定位误差不大于 1mm。
1、根据附页图02(分拣单元的装配效果图),完成分拣单元装置侧部件的安装和调整以及工作单元在工作台面上定位。
然后根据分拣单元工作的工艺要求完成它们的气路连接,并调整气路,确保各气缸运行顺畅和平稳。
2、输送单元直线导轨底板已经安装在工作台面上,继续完成装置侧部分的机械部件安装和调整工作,再根据该单元工作的工艺要求完成其气路连接,并调整气路,确保各气缸运行顺畅和平稳。
输送单元的装配效果图如图 2 所示。
图2 输送单元安装效果图3、供料单元、加工单元和装配单元的装置侧部分机械部件安装、气路连接工作已完成,请将这三个工作单元安装到工作台面上,然后进一步加以校核并调整气路,确保各气缸运行顺畅和平稳。
自动化产品系列快速旅程适用Super32 /Rock32 Super32/Rock32快速旅程目 录 Super32/Rock32快速旅程 i目 录目 录 (i)第1章 搭建系统 (3)1.1 系统组成 (3)1.2 配套资源 (4)1.3 安装Eopen 软件 (5)1.4 接线 (6)1.4.1 供电输入的接线 (6)1.4.2 模拟量输入(AI )的接线 (6)1.4.3 模拟量输出(AO )的接线 (7)1.4.4 数字量输入(DI )的接线 (7)1.4.5 数字量输出(DO )的接线 (8)1.4.6 计数量输入(PI )的接线 (10)1.4.7 RS232串行通讯的接线 (10)1.4.8 RS485 二线制连接方式 (12)1.5 控制器配置 (13)1.5.1 控制器版本信息查看 (13)1.5.2 控制器的初始化操作 (14)1.5.3 启动OpenPCS 软件 (15)1.5.4 运行ESet 配置软件 (16)目 录Super32/Rock32快速旅程ii 1.5.5 控制器通讯配置 (16)1.6 I/O 读写配置 (18)1.7 串口连接设备配置 (20)第2章 控制器的程序开发 (23)2.1 程序开发 (23)2.2 程序开发流程 (24)2.2.1 控制器通讯参数 (24)2.2.2 RS232连接设置 (24)2.2.3 TCP 连接设置 (29)2.2.4 OpenPCS 编程 (33)2.2.5 事件中断配置 (47)2.2.6 控制器操作 (51)附录A例程代码 (52)第1章 系统搭建Super32/Rock32快速旅程 3第1章 搭建系统1.1 系统组成图1-1AI DI AO DO PI第1章 系统搭建Super32/Rock32快速旅程41.2 配套资源Super32(Rock32类似)配套应有的资源有:Super32产品光盘《Super32使用手册》《Super32/Rock32快速旅程》《OpenPCS 编程手册》《OpenPCS 编程手册附录》《ESet 配置手册》第1章 系统搭建Super32/Rock32快速旅程 51.3 安装Eopen 软件EOpen 安装软件分两部分:第一部分为OpenPCS 编程软件,需要先安装。