转子绕线机控制器的设计
- 格式:docx
- 大小:96.63 KB
- 文档页数:11
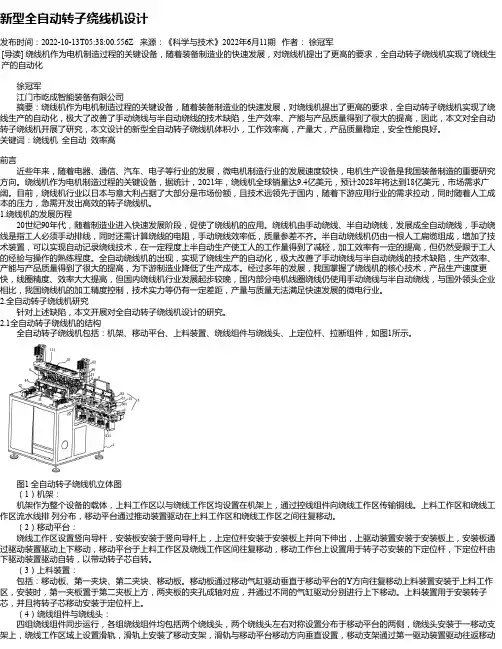
新型全自动转子绕线机设计发布时间:2022-10-13T05:38:00.556Z 来源:《科学与技术》2022年6月11期作者:徐冠军[导读] 绕线机作为电机制造过程的关键设备,随着装备制造业的快速发展,对绕线机提出了更高的要求,全自动转子绕线机实现了绕线生产的自动化徐冠军江门市屹成智能装备有限公司摘要:绕线机作为电机制造过程的关键设备,随着装备制造业的快速发展,对绕线机提出了更高的要求,全自动转子绕线机实现了绕线生产的自动化,极大了改善了手动绕线与半自动绕线的技术缺陷,生产效率、产能与产品质量得到了很大的提高,因此,本文对全自动转子绕线机开展了研究,本文设计的新型全自动转子绕线机体积小,工作效率高,产量大,产品质量稳定,安全性能良好。
关键词:绕线机全自动效率高前言近些年来,随着电器、通信、汽车、电子等行业的发展,微电机制造行业的发展速度较快,电机生产设备是我国装备制造的重要研究方向。
绕线机作为电机制造过程的关键设备,据统计,2021年,绕线机全球销量达9.4亿美元,预计2028年将达到18亿美元,市场需求广阔。
目前,绕线机行业以日本与意大利占据了大部分是市场份额,且技术远领先于国内,随着下游应用行业的需求拉动,同时随着人工成本的压力,急需开发出高效的转子绕线机。
1.绕线机的发展历程20世纪90年代,随着制造业进入快速发展阶段,促使了绕线机的应用。
绕线机由手动绕线、半自动绕线,发展成全自动绕线,手动绕线是指工人必须手动排线,同时还需计算绕线的电阻,手动绕线效率低,质量参差不齐。
半自动绕线机仍由一根人工扁缆组成,增加了技术装置,可以实现自动记录绕线技术,在一定程度上半自动生产使工人的工作量得到了减轻,加工效率有一定的提高,但仍然受限于工人的经验与操作的熟练程度。
全自动绕线机的出现,实现了绕线生产的自动化,极大改善了手动绕线与半自动绕线的技术缺陷,生产效率、产能与产品质量得到了很大的提高,为下游制造业降低了生产成本。
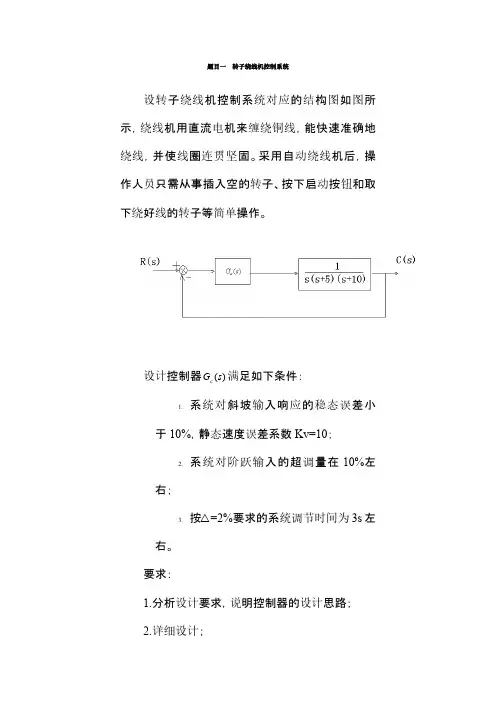
题目一转子绕线机控制系统设转子绕线机控制系统对应的结构图如图所示,绕线机用直流电机来缠绕铜线,能快速准确地绕线,并使线圈连贯坚固。
采用自动绕线机后,操作人员只需从事插入空的转子、按下启动按钮和取下绕好线的转子等简单操作。
设计控制器满足如下条件:(sG)c1.系统对斜坡输入响应的稳态误差小于10%,静态速度误差系数Kv=10;2.系统对阶跃输入的超调量在10%左右;3.按△=2%要求的系统调节时间为3s左右。
要求:1.分析设计要求,说明控制器的设计思路;2.详细设计;3.用MATLAB编程输出仿真结果及图形。
题目二海底隧道钻机控制系统连接法国和英国的英吉利海峡海底隧道于1987年12月开工建设,1990年11月,从两个国家分头开钻的隧道首次对接成功。
隧道长37.82km,位于海底面以下61m. 隧道于1992年完工,共耗资14亿美元,每天能通过50辆列车,从伦敦到巴黎的火车行车时间缩短为3h.钻机在推进过程中,为了保证必要的隧道对接精度,施工中使用了一个激光导引系统,以保持钻机的直线方向。
钻机控制系统如图所示。
图中C(s)为钻机向前的实际角度,R(s)为预期角度,N(s)为负载对机器的影响。
该系统设计目的是选择增益K,使系统对输入角度的响应满足工程要求,并且使扰动引起的稳态误差较小。
要求:1.分析设计要求,说明控制器的设计思路;2.详细设计;3.用MATLAB编程输出仿真结果及图形。
题目三哈勃太空望远镜指向控制哈勃太空望远镜于1990年4月14日发射至离地球611km的太空轨道,它的发射与应用将空间技术发展推向了一个新的高度。
望远镜的2.4m镜头拥有所有镜头中最光滑的表面,其指向系统能在644km以外将视野聚集在一枚硬币上。
望远镜的偏差在1993年12月的一次太空任务中得到了大范围的校正。
哈勃太空望远镜指向系统模型经简化后的结构图如图所示设计目标是选择放大器增益Ka和具有增益调节的测速反馈系数K1,使指向系统满足如下性能:1.在阶跃指令r(t)作用下,系统输出的超调量小于或等于10%.2.在斜坡输入作用下,稳态误差较小。
课程设计题 目: 转子绕线机控制器的设计初始条件:已知转子绕线机控制系统的开环传递函数是)10)(5()(++=s s s Ks G要求系统在单位斜坡输入作用下的稳态误差为e 0.1ss ≤,相角裕度 50≥γ。
要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)(1)作出满足初始条件的最小K值的未校正系统伯德图,计算系统的幅值裕度和相位裕度。
(2)在系统前向通路中插入一相位滞后校正装置,确定校正网络的传递函数。
并用MATLAB 画出已校正系统的伯德图,计算已校正系统的幅值裕量和相位裕量。
(3)画出未校正和已校正系统的根轨迹。
(4)用Matlab画出已校正系统的单位阶跃响应曲线、求出超调量、峰值时间、调节时间及稳态误差。
(5)课程设计说明书中要求写清楚计算分析的过程,列出MATLAB程序和MATLAB输出。
说明书的格式按照教务处标准书写。
时间安排:指导教师签名:年月日系主任(或责任教师)签名:年月日目录摘要 (1)1.设计目的与要求 (2)1.1设计的目的 (2)1.2设计的要求 (2)2.设计方案与原理 (3)2.2设计的原理 (3)3.设计分析与计算 (4)3.1校正前最小K值的系统频域分析 (4)3.2滞后校正 (4)3.2.1滞后校正函数的确定 (4)3.2.2校正后的系统频域分析 (5)4.系统校正前后的根轨迹 (6)4.1校正前的根轨迹 (6)4.2校正后的根轨迹 (7)5.已校正系统的单位阶跃响应及仿真分析 (7)6.心得体会.............................................................. 错误!未定义书签。
参考文献.................................................................. 错误!未定义书签。
本科生课程设计成绩评定表.................................. 错误!未定义书签。
电机转子自动安装控制系统设计方案电机转子自动安装控制系统设计方案是一项关键技术,旨在实现电机转子自动化生产线的高效运行。
该系统主要由机械结构、电气控制、传感器和计算机控制等部分组成。
在机械结构方面,该系统采用先进的机械臂和传送带等设备,实现电机转子自动装配和定位。
机械臂和传送带的运动速度和精度可以通过电气控制系统进行精确调节,以确保装配和定位的准确性和稳定性。
在电气控制方面,该系统采用先进的控制器和驱动器,实现电机转子自动装配的精准控制。
控制器和驱动器可以根据电机转子的尺寸和形状进行自适应调节,以确保装配的准确性和稳定性。
传感器是该系统的核心部分之一,用于检测电机转子的位置、尺寸、形状和姿态等参数。
该系统采用多种传感器,如激光测距传感器、视觉传感器和力传感器等,以确保装配的准确性和稳定性。
计算机控制是该系统的另一个重要组成部分,用于实现电机转子自动化生产线的整体控制和管理。
计算机控制系统可以实时监测和控制电机转子自动装配的各个环节,以确保生产线的高效运行和质量控制。
总之,电机转子自动安装控制系统设计方案是一项复杂而关键的技术,需要多个方面的技术支持和协同合作才能实现,该系统的成功应用将为电机制造业的高效生产和质量控制提供强有力的支持。
在控制工程中用得最广的是电气校正装置,它不但可应用于电的控制系统,而且通过将非电量信号转换成电量信号,还可应用于非电的控制系统。
控制系统的设计问题常常可以归结为设计适当类型和适当参数值的校正装置。
校正装置可以补偿系统不可变动部分(由控制对象、执行机构和量测部件组成的部分)在特性上的缺陷,使校正后的控制系统能满足事先要求的性能指标。
常用的性能指标形式可以是时间域的指标,如上升时间、超调量、过渡过程时间等(见过渡过程),也可以是频率域的指标,如相角裕量、增益裕量(见相对稳定性)、谐振峰值、带宽(见频率响应)等。
常用的串联校正装置有超前校正、滞后校正、滞后-超前校正三种类型。
在许多情况下,它们都是由电阻、电容按不同方式连接成的一些四端网络。
各类校正装置的特性可用它们的传递函数来表示,此外也常采用频率响应的波德图来表示。
不同类型的校正装置对信号产生不同的校正作用,以满足不同要求的控制系统在改善特性上的需要。
在工业控制系统如温度控制系统、流量控制系统中,串联校正装置采用有源网络的形式,并且制成通用性的调节器,称为PID(比例-积分-微分)调节器,它的校正作用与滞后-超前校正装置类同。
摘要 (1)ABSTRACT (2)1 课程设计目的及要求 (3)1.1目的 (3)1.2要求 (3)1.3方案比较分析 (3)2 设计计算与分析 (3)2.1计算幅值与相位裕度 (4)2.2使用MATLAB软件获得系统的伯德图和相位,幅值裕度。
(4)3 确定校正网络传递函数 (6)3.1滞后超前校正设计 (6)3.2校验校正后系统是否满足要求 (6)4. 校正前后系统根轨迹的绘制 (7)4.1校正前系统根轨迹 (7)4.2校正后系统的根轨迹分析 (8)5 系统动态性能的分析 (9)5.1校正前系统的动态性能分析 (9)5.2校正后系统的动态性能分析 (10)心得体会 (13)参考文献 (14)摘要在现代科学技术的众多领域中,自动控制技术起着越来越重要的作用,而自动控制理论是自动控制科学的核心。
转子绕线机的控制原理分析转子绕线机是用于对电机转子进行绕线的设备,它的控制原理主要包括机械传动系统和电气控制系统两个方面。
机械传动系统是转子绕线机的核心部分,通过它来实现对转子的精确绕线。
通常,绕线机的主要机械部件包括转子定位装置、绕线架、滑片和主轴等。
转子定位装置通过夹具来固定转子,保证绕线的准确性。
绕线架是用来支撑线圈,使其能够均匀地绕在转子上。
滑片通过螺杆的传动来控制绕线的位置和速度,保证绕线的精确性。
主轴是供给动力的部件,通过电机的驱动使得整个机械系统运转。
电气控制系统是对机械系统进行控制和调节的核心部分。
电气控制系统由PLC (可编程逻辑控制器)、变频器、伺服电机等组成,主要用来控制和调节绕线的速度、角度和位置。
PLC作为控制核心,通过读取传感器信号和用户输入信号,实现对绕线机各个部件的控制和调节。
变频器控制转子绕线机的主轴电机转速,可以根据不同的需求进行精确调节。
伺服电机则用于驱动滑片,使得绕线的位置和速度可以实现高度精确控制。
在转子绕线机的操作过程中,首先需要将转子放置在转子定位装置上,并对其进行固定。
然后,用户可以根据需要设置绕线的参数,如速度、绕线角度、绕线位置等。
这些设置通过PLC控制器进行接收,并传递给相应的驱动器。
驱动器会根据这些设置,控制转子绕线机的运行,实现对转子的精确绕线。
总结起来,转子绕线机的控制原理是通过机械传动系统和电气控制系统相结合的方式,实现对转子的精确绕线。
机械传动系统的主要部分包括转子定位装置、绕线架、滑片和主轴等,电气控制系统由PLC、变频器、伺服电机等组成,用来控制和调节绕线的速度、角度和位置。
通过对转子的准确定位、精确控制绕线参数,可以实现高度精度的转子绕线。

自动控制课程设计题目题目一 转子绕线机控制系统设转子绕线机控制系统对应的结构图如图所示,绕线机用直流电机来缠绕铜线,能快速准确地绕线,并使线圈连贯坚固。
采用自动绕线机后,操作人员只需从事插入空的转子、按下启动按钮和取下绕好线的转子等简单操作。
设计控制器)(s G c 满足如下条件:1. 系统对斜坡输入响应的稳态误差小于10%,静态速度误差系数Kv=10;2. 系统对阶跃输入的超调量在10%左右;3. 按△=2%要求的系统调节时间为3s 左右。
要求:1.分析设计要求,说明控制器的设计思路;2.详细设计;3.用MATLAB 编程输出仿真结果及图形。
题目二海底隧道钻机控制系统连接法国和英国的英吉利海峡海底隧道于1987年12月开工建设,1990年11月,从两个国家分头开钻的隧道首次对接成功。
隧道长37.82km,位于海底面以下61m. 隧道于1992年完工,共耗资14亿美元,每天能通过50辆列车,从伦敦到巴黎的火车行车时间缩短为3h.钻机在推进过程中,为了保证必要的隧道对接精度,施工中使用了一个激光导引系统,以保持钻机的直线方向。
钻机控制系统如图所示。
图中C(s)为钻机向前的实际角度,R(s)为预期角度,N(s)为负载对机器的影响。
该系统设计目的是选择增益K,使系统对输入角度的响应满足工程要求,并且使扰动引起的稳态误差较小。
要求:1.分析设计要求,说明控制器的设计思路;2.详细设计;3.用MATLAB编程输出仿真结果及图形。
题目三哈勃太空望远镜指向控制哈勃太空望远镜于1990年4月14日发射至离地球611km的太空轨道,它的发射与应用将空间技术发展推向了一个新的高度。
望远镜的2.4m镜头拥有所有镜头中最光滑的表面,其指向系统能在644km以外将视野聚集在一枚硬币上。
望远镜的偏差在1993年12月的一次太空任务中得到了大范围的校正。
哈勃太空望远镜指向系统模型经简化后的结构图如图所示设计目标是选择放大器增益Ka 和具有增益调节的测速反馈系数K1,使指向系统满足如下性能:1. 在阶跃指令r(t)作用下,系统输出的超调量小于或等于10%.2. 在斜坡输入作用下,稳态误差较小。
转子绕线机控制系统的滞后校正设计1设计目的由于滞后校正网络具有低通滤波器的特性, 因而当它与系统的不可变部分串联相连时, 会使系统开环频率特性的中频和高频段增益降低和截止频率Wc减小, 从而有可能使系统获得足够大的相位裕度, 它不影响频率特性的低频段。
由此可见, 滞后校正在一定的条件下, 也能使系统同时满足动态和静态的要求。
可运用于以下场所: 1.在系统响应速度要求不高而抑制噪声电平性能要求较高的情况下, 可考虑采用串联滞后校正。
2.保持原有的已满足要求的动态性能不变, 而用以提高系统的开环增益, 减小系统的稳态误差。
2设计要求1. MATLAB作出满足初始条件的最小K值的系统伯德图, 计算系统的幅值裕度和相位裕度。
2. 前向通路中插入一相位滞后校正, 确定校正网络的传递函数。
3. 用MATLAB画出未校正和已校正系统的根轨迹。
4.用Matlab对校正前后的系统进行仿真分析, 画出阶跃响应曲线, 计算其时域性能指标。
5.课程设计说明书中要求写清楚计算分析的过程, 列出MATLAB程序和MATLAB输出。
说明书的格式按照教务处标准书写。
3设计原理利用滞后网络进行串联校正控制的基本原理, 是利用滞后网络的高频幅值衰减特性, 使已校正的系统截止频率下降, 从而使系统获得足够的相角裕度。
因此, 滞后网络的最大滞后角应力求避免发生在系统截止频率附近。
在系统响应速度要求不高而抑制噪声电平性能要求较高的情况下, 可采用串联校正。
此外, 如果待校正的系统已具备满意的动态性能, 仅稳态性能不满足指标要求, 也可采用串联滞后校正以提高系统的稳态精度, 同时保持其动态性能仍满足要求。
如果所研究的系统为单位反馈最小相位系统, 则应用频率法设计串联滞后校正网络的步骤如下:4设计分析与计算4.1最小K 值的系统频域分析已知转子绕线机控制系统的开环传递函数是: )10)(2()(++=s s s Ks G (静态误差系数115-≥s K v )所以最小的K 值为: K=300101520/)(lim -→≥==s K s sG K s v故:相位裕度: 先求穿越频率 221004300|10||2|||300)(ωωωω++=+⨯+⨯=s s s A在穿越频率处 =1,由于w 较小, 故可以近似为,1410300)(2=+=ωωωA 解得Wc ≈5rad/s穿越频率处的相角为:相角裕度为: deg幅值裕度:先求相角穿越频率:即:由三角函数关系得: 0.525.11004300)(22≈++=ggg g A ωωωω所以, 幅值裕度为:使用MATLAB 软件可直接得到系统的BODE 图和相角,幅值裕度。
转子绕线机控制系统的滞后校正设1. 设计目的首先,通过对转子绕线机控制系统的分析,加强对转子绕线机控制系统的 认识,并掌握滞后校正设计的方法。
其次,通过设计,培养分析问题解决问题的 能力。
此外,使用MATLAB^件进行系统仿真,从而进一步掌握 MATLA 的使用2. 设计任务及要求已知转子绕线机控制系统的开环传递函数为:要求系统的静态速度误差系数K -15s,相角裕度-5°要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等 具体要求)① MATLAB 作出满足初始条件的最小 K 值的系统伯德图,计算系统的幅值裕度和相位裕度。
② 前向通路中插入一相位滞后校正,确定校正网络的传递函数 ③ 用MATLAB 画出未校正和已校正系统的根轨迹。
②用MATLAB 对校正前后的系统进行仿真分析,画出阶跃响应曲线,计 算其时域性能指标。
课程设计说明书中要求写清楚计算分析的过程,列出MATLAB 程序和MATLAB 输出。
3. 设计方案论证当控制系统的性能指标不能满足期望的特性指标时,需要在已选定的系统 不可变部分(包括测量元件,比较元件,放大元件及执行机构等)的基础上加入 一些装置(即校正装置),使系统能满足各项性能指标。
3.1校正前系统分析用MATLA 作出满足初始条件的最小 K 值的系统伯德图,计算系统的幅值裕G(s)二K s(s 2)( s 10)度和相位裕度。
首先,确定k 值:k - 300则可得到满足初始条件的最小 K 值: k=300那么满足初始条件的最小K 值的系统开环传递函数为:用MATLAB^件作出校正前满足初始条件的最小 k 值的系统伯德图如下MATLAB?序:k0=300;n1=1;d 仁conv(con v([1 0],[1 2]),[1 10]); [mag,phase,w]=bode(kO* n1,d1); figure(1);margi n( mag,phase,w);人=limn sG (s )=limsks(s 2)(s 10)k 20k v -15k 20G(s)=300 s(s 2)(s 10)15 ______ s(0.1s 1)(0.5s 1)图3-1 :校正前满足初始条件的最小 k 值的系统伯德图由伯德图可知系统的幅值裕度G^ -1.94dB」穿越频率W ^4-47rad S" 相角裕度P m 八4.61deg 截止频率W厂4.98rad S"3.2选择校正方案前向通路中插入一相位滞后校正,确定校正网络的传递函数。
绪论在控制工程中用得最广的是电气校正装置,它不但可应用于电的控制系统,而且通过将非电量信号转换成电量信号,还可应用于非电的控制系统。
控制系统的设计问题常常可以归结为设计适当类型和适当参数值的校正装置。
校正装置可以补偿系统不可变动部分(由控制对象、执行机构和量测部件组成的部分)在特性上的缺陷,使校正后的控制系统能满足事先要求的性能指标。
常用的性能指标形式可以是时间域的指标,如上升时间、超调量、过渡过程时间等(见过渡过程),也可以是频率域的指标,如相角裕量、增益裕量(见相对稳定性)、谐振峰值、带宽(见频率响应)等。
常用的串联校正装置有超前校正、滞后校正、滞后-超前校正三种类型。
在许多情况下,它们都是由电阻、电容按不同方式连接成的一些四端网络。
各类校正装置的特性可用它们的传递函数来表示,此外也常采用频率响应的波德图来表示。
不同类型的校正装置对信号产生不同的校正作用,以满足不同要求的控制系统在改善特性上的需要。
在工业控制系统如温度控制系统、流量控制系统中,串联校正装置采用有源网络的形式,并且制成通用性的调节器,称为PID (比例-积分-微分)调节器,它的校正作用与滞后-超前校正装置类同。
目录摘要 (1)ABSTRACT (2)1课程设计目的及要求 (3)1.1目的 (3)1.2要求 (3)1.3方案比较分析 (3)2设计计算与分析 (3)2.1计算幅值与相位裕度 (4)2.2使用MATLA软件获得系统的伯德图和相位,幅值裕度。
(4)3确定校正网络传递函数 (6)3.1 滞后超前校正设计 (6)3.2校验校正后系统是否满足要求 (6)4.校正前后系统根轨迹的绘制 (7)4.1校正前系统根轨迹 (7)4.2校正后系统的根轨迹分析 (8)5系统动态性能的分析 (9)5.1校正前系统的动态性能分析 (9)5.2校正后系统的动态性能分析 (10)心得体会 (13)参考文献 (14)摘要在现代科学技术的众多领域中,自动控制技术起着越来越重要的作用,而自动控制理论是自动控制科学的核心。
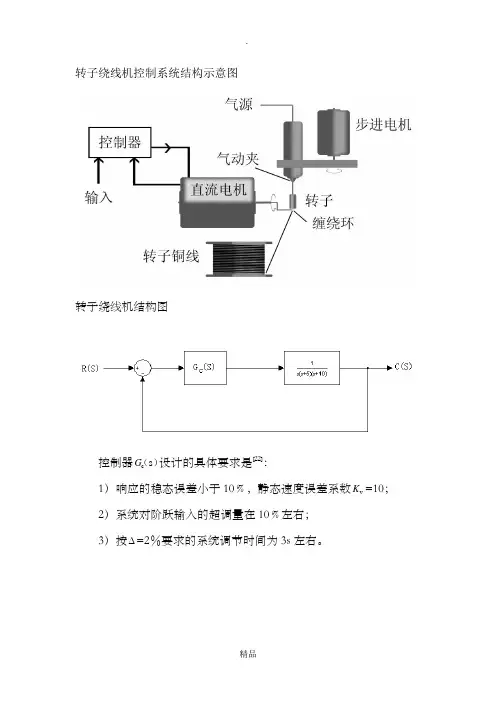
转子绕线机控制系统结构示意图转子绕线机结构图控制器c sG()设计的具体要求是[22]:1)响应的稳态误差小于10﹪,静态速度误差系数vK=10;2)系统对阶跃输入的超调量在10﹪左右;3)按 =2%要求的系统调节时间为3s左右。
为了提高系统的稳定精度,必须采用高增益,但过高的1K 对系统的稳定性和动态性能都会产生不利影响。
需要调节不同的1K 值下的系统响应。
1K =500时对应的控制器的瞬态响应如图16所示。
Step ResponseTime (sec)A m p l i t u d e0246810120.20.40.60.811.21.41.61.8System: GP eak amplitude: 1.7Overshoot (%): 69.9At time (sec): 0.607System: Gse Time (sec): 0.205System: GSettling Time (sec): 7.51System: G Final Value: 1上升时间s t r 205.0=,峰值7.1)(=p t h ,超调量%9.69%=σ,峰值时间s 607.0=p t ,调节时间s 51.7=s t ,终值1)(=∞h 。
速度误差系数c v s 0s =50limG K →()1050500501===K 速度误差()%1050050501===∞K e ss当1K 取不同值时系统的各项性能当1K =500, )(∞ss e =10%,刚好满足设计要求,但系统对阶跃输入的σ%=70%,s t =8s ,远大于设计指标值。
因此,必须采用较为复杂的校正网络。
)(∞ss e 要求,取1K =500,绘出未校正系统的伯德图10101010-150-100-5050M a g n i t u d e (d B )10-110101102103-270-225-180-135-90P h a s e (d e g )Bode DiagramGm = 15.5 dB (at 17.3 rad/sec) , P m = 59.2 deg (at 5.41 rad/sec)Frequency (rad/sec)超前校正:Step ResponseTime (sec)A m p l i t u d e00.51 1.50.20.40.60.811.21.4校正后系统的阶跃响应表明,系统引入超前校正网络后,相角裕度明显增大,动能改善较大,超调量及调节时间已能满足设计要求,但校正后系统的静态速度误差系数1800 3.55.0451025v K ⨯==⨯⨯<10使得系统斜坡响应的稳态误差高达20%,不符合设计指标要求。
课程设计课程设计任务书学生姓名:化学院题目: 转子绕线机控制系统的滞后校正设计初始条件:已知转子绕线机控制系统的开环传递函数为:要求系统的静态速度误差系数151-≥s K v ,相位裕度 56≥γ。
要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)1、 用MATLAB 作出满足初始条件的最小K 值的系统的伯德图,计算系统的幅值裕度和相位裕度。
2、 前向通路中插入一相位滞后校正,确定校正网络的传递函数。
3、 用MATLAB 画出未校正和已校正系统的根轨迹。
4、 用MATLAB 对校正前后的系统进行仿真分析,画出阶跃响应曲线,计算其时域性能指标。
5、 课程设计说明书中要求写清楚计算分析的过程,列出MATLAB 程序和MATLAB 输出。
说明书的格式按照教务处标准书写。
时间安排:指导教师签名: 年 月 日系主任(或责任教师)签名: 年 月 日)01)(1()(++=s s s Ks G目录摘要 ----------------------------------------------- 1 1设计目的、要求及原理------------------------------ 21.1设计目的-------------------------------------- 21.2 设计要求------------------------------------- 21.3设计原理-------------------------------------- 2 2设计分析与计算------------------------------------ 32.1最小K值的系统频域分析------------------------ 32.2滞后校正函数计算------------------------------ 4 3用MATLAB画校正前后的轨迹------------------------- 83.1校正前的根轨迹-------------------------------- 83.2校正后的根轨迹-------------------------------- 9 4用Matlab对校正前后的系统进行仿真分析------------ 114.1校正前系统----------------------------------- 114.2校正后系统----------------------------------- 13 心得体会 ------------------------------------------ 15 参考文献 ------------------------------------------ 16摘要自动控制技术已广泛应用于制造业、农业、交通、航空及航天等众多产业部门,极大地提高了社会劳动生产率,改善了人们的劳动条件,丰富和提高了人民的生活水平。
在控制工程中用得最广的是电气校正装置,它不但可应用于电的控制系统,而且通过将非电量信号转换成电量信号,还可应用于非电的控制系统。
控制系统的设计问题常常可以归结为设计适当类型和适当参数值的校正装置。
校正装置可以补偿系统不可变动部分(由控制对象、执行机构和量测部件组成的部分)在特性上的缺陷,使校正后的控制系统能满足事先要求的性能指标。
常用的性能指标形式可以是时间域的指标,如上升时间、超调量、过渡过程时间等(见过渡过程),也可以是频率域的指标,如相角裕量、增益裕量(见相对稳定性)、谐振峰值、带宽(见频率响应)等。
常用的串联校正装置有超前校正、滞后校正、滞后-超前校正三种类型。
在许多情况下,它们都是由电阻、电容按不同方式连接成的一些四端网络。
各类校正装置的特性可用它们的传递函数来表示,此外也常采用频率响应的波德图来表示。
不同类型的校正装置对信号产生不同的校正作用,以满足不同要求的控制系统在改善特性上的需要。
在工业控制系统如温度控制系统、流量控制系统中,串联校正装置采用有源网络的形式,并且制成通用性的调节器,称为PID(比例-积分-微分)调节器,它的校正作用与滞后-超前校正装置类同。
摘要 (1)ABSTRACT (2)1 课程设计目的及要求 (3)1.1目的 (3)1.2要求 (3)1.3方案比较分析 (3)2 设计计算与分析 (3)2.1计算幅值与相位裕度 (4)2.2使用MATLAB软件获得系统的伯德图和相位,幅值裕度。
(4)3 确定校正网络传递函数 (6)3.1滞后超前校正设计 (6)3.2校验校正后系统是否满足要求 (6)4. 校正前后系统根轨迹的绘制 (7)4.1校正前系统根轨迹 (7)4.2校正后系统的根轨迹分析 (8)5 系统动态性能的分析 (9)5.1校正前系统的动态性能分析 (9)5.2校正后系统的动态性能分析 (10)心得体会 (13)参考文献 (14)摘要在现代科学技术的众多领域中,自动控制技术起着越来越重要的作用,而自动控制理论是自动控制科学的核心。
自动控制技术是生产过程中的关键环节,也是许多高新技术产品的核心技术。
自动控制技术广泛应用于制造业、农业、交通、航空及航天等众多产业部门,极大的提高了社会劳动生产率,改善了人们的劳动条件,丰富和提高了人民的生活水平研究分析系统有时域分析法和频率法。
时域分析是通过求解系统的微分方程来研究和分析系统,而频率法可以直观的分析系统的稳定性。
在此次课程设计中需要对系统进行频域分析,通过引入滞后校正,利用滞后校正的高频衰减的特性,降低截止频率,提高相位裕度,不影响频率特性的低频段。
由此可见,滞后校正在一定的条件下,也能使系统同时满足动态和静态的要求。
可运用于以下场所:1.在系统响应速度要求不高而抑制噪声电平性能要求较高的情况下,可考虑采用串联滞后校正。
2.保持原有的已满足要求的动态性能不变,而用以提高系统的开环增益,减小系统的稳态误差。
MATLAB是矩阵实验室(Matrix Laboratory)的简称,是美国MathWorks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,主要包括MATLAB和Simulink两大部分。
MATLAB在自动控制理论诸多数据分析研究、数学模型的运算、数据的分析、模拟实验等过程中有着广泛的应用。
怎样确定控制系统的性能指标是控.制系统的分析问题,怎样使自动控制系统的性能指标满足设计要求是控制系统的设计与改造问题。
用MATLAB辅助计算可以大大节省时间,方便系统设计。
前言 (1)任务书 (3)1、利用MATLAB进行系统的频域分析1.1绘制满足初始条件最小K值的bode图 (4)1.2相位裕度和截止频率 (5)2、相位滞后校正网络传递函数 (7)3、用MATLAB画根轨迹3.1校正前系统根轨迹 (7)3.2校正后系统根轨迹 (9)4、检验校正结果 (10)体会与收获 (12)课程设计任务书题 目: 转子绕线机控制系统的滞后校正设计。
转子绕线机控制系统结构示意图转子绕线机结构图控制器c sG()设计的具体要求是[22]:1)响应的稳态误差小于10﹪,静态速度误差系数vK=10;2)系统对阶跃输入的超调量在10﹪左右;3)按 =2%要求的系统调节时间为3s左右。
为了提高系统的稳定精度,必须采用高增益,但过高的1K 对系统的稳定性和动态性能都会产生不利影响。
需要调节不同的1K 值下的系统响应。
1K =500时对应的控制器的瞬态响应如图16所示。
Step ResponseTime (sec)A m p l i t u d e0246810120.20.40.60.811.21.41.61.8System: GP eak amplitude: 1.7Overshoot (%): 69.9At time (sec): 0.607System: Gse Time (sec): 0.205System: GSettling Time (sec): 7.51System: G Final Value: 1上升时间s t r 205.0=,峰值7.1)(=p t h ,超调量%9.69%=σ,峰值时间s 607.0=p t ,调节时间s 51.7=s t ,终值1)(=∞h 。
速度误差系数c v s 0s =50limG K →()1050500501===K 速度误差()%1050050501===∞K e ss当1K 取不同值时系统的各项性能当1K =500, )(∞ss e =10%,刚好满足设计要求,但系统对阶跃输入的σ%=70%,s t =8s ,远大于设计指标值。
因此,必须采用较为复杂的校正网络。
)(∞ss e 要求,取1K =500,绘出未校正系统的伯德图10101010-150-100-5050M a g n i t u d e (d B )10-110101102103-270-225-180-135-90P h a s e (d e g )Bode DiagramGm = 15.5 dB (at 17.3 rad/sec) , P m = 59.2 deg (at 5.41 rad/sec)Frequency (rad/sec)超前校正:Step ResponseTime (sec)A m p l i t u d e00.51 1.50.20.40.60.811.21.4校正后系统的阶跃响应表明,系统引入超前校正网络后,相角裕度明显增大,动能改善较大,超调量及调节时间已能满足设计要求,但校正后系统的静态速度误差系数1800 3.55.0451025v K ⨯==⨯⨯<10使得系统斜坡响应的稳态误差高达20%,不符合设计指标要求。
课程设计题 目: 转子绕线机控制器的设计初始条件:已知转子绕线机控制系统的开环传递函数是)10)(5()(++=s s s Ks G要求系统在单位斜坡输入作用下的稳态误差为e 0.1ss ≤,相角裕度 50≥γ。
要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)(1)作出满足初始条件的最小K值的未校正系统伯德图,计算系统的幅值裕度和相位裕度。
(2)在系统前向通路中插入一相位滞后校正装置,确定校正网络的传递函数。
并用MATLAB 画出已校正系统的伯德图,计算已校正系统的幅值裕量和相位裕量。
(3)画出未校正和已校正系统的根轨迹。
(4)用Matlab画出已校正系统的单位阶跃响应曲线、求出超调量、峰值时间、调节时间及稳态误差。
(5)课程设计说明书中要求写清楚计算分析的过程,列出MATLAB程序和MATLAB输出。
说明书的格式按照教务处标准书写。
时间安排:指导教师签名:年月日系主任(或责任教师)签名:年月日目录摘要 (1)1.设计目的与要求 (2)1.1设计的目的 (2)1.2设计的要求 (2)2.设计方案与原理 (3)2.2设计的原理 (3)3.设计分析与计算 (4)3.1校正前最小K值的系统频域分析 (4)3.2滞后校正 (4)3.2.1滞后校正函数的确定 (4)3.2.2校正后的系统频域分析 (5)4.系统校正前后的根轨迹 (6)4.1校正前的根轨迹 (6)4.2校正后的根轨迹 (7)5.已校正系统的单位阶跃响应及仿真分析 (7)6.心得体会.............................................................. 错误!未定义书签。
参考文献.................................................................. 错误!未定义书签。
本科生课程设计成绩评定表.................................. 错误!未定义书签。
摘要自动控制技术已广泛应用于制造业、农业、交通、航空及航天等众多产业部门,极大地提高了社会劳动生产率,改善了人们的劳动条件,丰富和提高了人民的生活水平。
在今天的社会生活中,自动化装置无所不在,为人类文明进步做出了重要贡献。
为了实现各种复杂的控制任务,首先要将被控对象和控制装置按照一定的方式连接起来,再通过相应的物理公式和数学方法,将其模型化、公式化。
通过自动控制原理,及其相关的技术,将不理想的系统,通过分析、校正等方式达到所要求的目标。
而本次课程设计正是基于以上思路,对转子绕线机的控制器进行分析校正,使得它的静态误差及动态响应满足设计要求。
通过MATLAB进行仿真分析,使用其绘制伯德图、根轨迹图等功能,完成系统的设计。
关键词:自动控制原理滞后校正系统分析 MATLAB1.设计目的与要求1.1设计的目的题目:已知转子绕线机控制系统的开环传递函数是)10)(5()(++=s s s Ks G要求系统在单位斜坡输入作用下的稳态误差为e 0.1ss ≤,相角裕度 50≥γ。
1.2设计的要求(1) 作出满足初始条件的最小K 值的未校正系统伯德图,计算系统的幅值裕度和相位裕度。
(2) 在系统前向通路中插入一相位滞后校正装置,确定校正网络的传递函数。
并用MATLAB 画出已校正系统的伯德图,计算已校正系统的幅值裕量和相位裕量。
(3) 画出未校正和已校正系统的根轨迹。
(4) 用Matlab 画出已校正系统的单位阶跃响应曲线、求出超调量、峰值时间、调节时间及稳态误差。
(5) 课程设计说明书中要求写清楚计算分析的过程,列出MATLAB 程序和MATLAB 输出。
说明书的格式按照教务处标准书写。
2.设计方案与原理2.1设计的方案根据题目分析,初步粗略计算发现,校正前截止频率为5.7°,相角裕度为11°,而设计要求为相角裕度到50°,且没有要求截止频率。
可以证明,当超前网络的a值渠道100时,系统的相角裕度仍不到50°,而截止频率却大大增加,考虑到本系统对截止频率要求不大,故选用串联之后校正。
利用滞后网络进行串联校正,是利用滞后校正的高频幅值衰减特性,使已校正的系统截止频率下降,从而使系统获得足够的相角裕度。
因此,滞后网络的最大滞后角应力求避免发生在截止频率附近。
2.2设计的原理通过分析系统逐步确定其矫正系统参数,具体步骤如下:1.根据稳态误差要求求出K值;2.画出未校正系统的波特图,并求;3.波特图上绘制出曲线;4.根据稳态误差要求,求出校正系统的截止频率;5.根据公式和 ,可求出b和t;6.验证已校正系统的相位裕度和幅值裕度;3.设计分析与计算3.1校正前最小K 值的系统频域分析已知转子绕线机控制系统的开环传递函数是:)10)(5()(++=s s s Ks G ,稳态误差为e 0.1ss ≤,静态速度误差系数)1(101=≥-R s K v 。
3.2滞后校正3.2.1滞后校正函数的确定求滞后校正的网络函数可以按设计原理所讲述的方法进行求解,但过程比较麻烦,这里使用MATLAB 进行编程求解的方法。
操作简单,可快速得到结果。
由于按设计要求幅值裕度 50≥γ。
根据要求令相角裕度γ=50°并附加6°,即取γ=56°。
设滞后校正器的传递函数为:校正前的开环传递函数为:用matlab 编写滞后校正的程序代码如下: k0=500;n1=1;d1=conv(conv([1 0],[1 5]),[1 10]); Go=tf(k0*n1,d1); [mag,phase,w]=bode(Go); Mag=20*log10(mag); Pm=50; Pm1=Pm+6; Qm=Pm1*pi/180;11)(++=Ts bTs s G c )10)(5(500)(++=s s s s Gb=(1-sin(Qm))/(1+sin(Qm)); Lcdb=-20*log10(b); wc=spline(Mag,w,Lcdb); T=10/(wc*b); Tz=b*T;Gc=tf([Tz 1],[T 1]) 图2滞后环节函数的计算得到结果为:3.2.2校正后的系统频域分析使用matlab 检验是否符合要求,程序代码为: s1=tf(K*n1,d1);n2=[10.92 1];d2=[116.8 1];s2=tf(n2,d2); sys=s1*s2;[mag,phase,w]=bode(sys); margin(sys)18.116192.10)(++=s s s G c图3系统校正后bode图由上图可知:MATLAB仿真结果为:Gm=32.8dB Pm=77.7deg (符合设计要求)4.系统校正前后的根轨迹4.1校正前的根轨迹由于系统未校正前的开环传递函数为:使用MATLAB 画根轨迹代码如下: num=500den=conv(conv([1,0],[1,5]),[1,10]) rlocus(num,den)title ('控制系统未校正前根轨迹图')图4校正前根轨迹图4.2校正后的根轨迹系统校正后的开环传递函数为:使用MATLAB 画根轨迹代码如下: num=500*[10.92,1]den=conv(conv([1,10],[116.8,1]),[1,5,0])rlocus(num,den)title('控制系统校正后根轨迹图')图5校正后根轨迹图图6校正后根轨迹局部放大图5.已校正系统的单位阶跃响应及仿真分析系统校正后的开环传递函数为:单位负反馈闭环传递函数为:5005510585517538.116)192.10(500)()()(234+++++==Φs s s s s s R s C s 使用MATLAB 求校正后系统单位阶跃响应的性能指标代,代码如下:)10)(5(500)(++=s s s s G )18.116)(10)(5()192.10(500)(++++=s s s s s sG武汉理工大学《自动控制原理》课程设计说明书然后使用matlab中的LTI Viewer工具,在MATLAB提示符后,输入ltiview,即可启动该图形软件。
从File的下拉菜单中选中→import选项选择需要仿真的系统。
选择窗口中的Lsys系统,并用鼠标点击OK。
在画面中点击鼠标右键,选择“Characteristics”选项,再选择“Peak Time”项可得阶跃响应曲线中的峰值时间。
在画面中点击鼠标右键,选择“Characteristics”选项,再选择“Settling Time”、“Rise Time”、“Steady State”选项可得阶跃响应曲线中的调节时间,上升时间,稳态值,单击各个点,图中显示相应的数据,可通过鼠标移动标注的位置。
通过点击“Edit”菜单,在弹出的下拉菜单中选择“Viewer Preferences”项,设定阶跃响应的上升时间范围为最终稳态值的0~90%,调节时间的误差带为2%,即可得到系统校正后的单位阶跃响应曲线。
8。