转子绕线机控制系统的校正设计仿真任务书
- 格式:doc
- 大小:486.50 KB
- 文档页数:17
项目七绕线机控制系统改造学习指导书一、学习目标本学习情境是一个完整的小型工程项目,通过本学习情境的学习一方面要求学生掌握绕线机控制系统改造的设计、安装、调试知识和技能;另一方面掌握绕线机改造项目实施的工作流程和要点。
在该学习情境中要求每两名学生组成一个团队,通过分工协作共同完成改造任务。
1.熟悉设备改造工程的实施过程◆正确分析改造任务◆小型设备改造工程的实施流程及组织、协调◆改造施工过程管理与控制2.掌握相关国家标准与规范◆盘、柜及二次回路结线施工及验收规范GB50171—92◆电气设备安全设计导则GB 4064-83◆国家电气设备安全技术规范GB 19517-2004◆机械安全机械电气设备:通用技术条件GB 5226.1-2002◆用电安全导则GBT 13869-92◆电气安全管理规程JBJ6-80◆电控设备第二部分装有电子器件的电控设备GB3797-1989◆外壳防护等级(IP代码)GB4208-93◆工业与民用电力装置的接地设计规范GBJ65-83◆电气装置安装工程施工及验收规范GBJ232-823.掌握触摸屏的使用方法◆触摸屏的特点及性能指标◆组态软件的使用◆正确与PLC连接并实现数据交换4.掌握变频器的使用方法◆变频器结构、性能特点及应用◆线路连接◆常用运行参数设置方法◆变频器的常规检查与维护5.掌握旋转编码器、接近开关的使用方法◆种类、结构特点及场合◆接口类型及连接方法◆使用要求及调整◆好坏判断6.能编写、调试较复杂的PLC控制程序◆编写中断程序◆编写基于触摸屏的人机界面程序7.学会设备技术文件的编写与整理◆编写改造方案◆绘制控制系统原理图、布置图、连接图及走线图◆编制施工进度表◆编写调试方案、调试记录二、学生需准备的资料1.西门子、三菱、欧姆龙等主流品牌PLC的选型样本2.西门子、三菱、欧姆龙等主流品牌PLC的系统手册3.主流触摸屏生产厂家触摸屏产品的选型样本、使用手册、编程软件。
绕线机作业指导书一、概述绕线机是一种用于电子元器件绕线的自动化设备。
本作业指导书旨在提供详细的操作步骤和注意事项,以确保绕线机的安全和高效运行。
二、操作步骤1. 准备工作a. 确保绕线机和相关设备处于正常工作状态。
b. 检查绕线机的电源和电气路线,确保其接地良好。
c. 根据绕线要求,准备好所需的线材和绕线工具。
2. 设置绕线机a. 打开绕线机的控制面板,将绕线参数设置为所需数值。
这些参数包括绕线速度、绕线张力、绕线方向等。
b. 根据绕线要求,选择合适的绕线头和夹具,并将其正确安装在绕线机上。
c. 根据绕线要求,调整绕线机的绕线位置和绕线角度。
3. 绕线操作a. 将待绕线的元器件放置在绕线机的工作台上,并确保其位置准确。
b. 启动绕线机,确保绕线头和夹具与元器件的绕线点接触良好。
c. 根据绕线要求,调整绕线机的绕线速度和张力,以确保绕线质量。
d. 观察绕线过程中的绕线质量和绕线头的工作状态,及时进行调整和维护。
e. 绕线完成后,住手绕线机的运行,并将绕线好的元器件取下。
4. 维护和保养a. 每次使用绕线机后,清洁绕线头和夹具,确保其表面无杂质。
b. 定期检查绕线机的电气路线和机械部件,确保其正常工作。
c. 根据绕线机的使用频率,定期更换绕线头和夹具,以保证绕线质量。
三、注意事项1. 操作人员应熟悉绕线机的操作方法和安全规定,并遵守相关操作规程。
2. 在操作绕线机时,应注意个人安全,避免手部或者其他身体部位接触到运动中的绕线头和夹具。
3. 在绕线过程中,应注意绕线头和夹具的工作状态,及时调整和更换损坏的部件。
4. 绕线机的电源和电气路线必须符合安全标准,并定期检查和维护。
5. 绕线机的绕线参数应根据绕线要求进行合理设置,以确保绕线质量。
6. 绕线机的工作环境应干燥、无尘、无腐蚀性气体,以保证绕线质量和设备寿命。
四、常见问题及解决方法1. 绕线过程中浮现线材断裂怎么办?解决方法:检查绕线机的绕线张力设置是否过高,适当降低绕线张力;检查线材是否有损坏或者过期,更换合适的线材。
绪论在控制工程中用得最广的是电气校正装置,它不但可应用于电的控制系统,而且通过将非电量信号转换成电量信号,还可应用于非电的控制系统。
控制系统的设计问题常常可以归结为设计适当类型和适当参数值的校正装置。
校正装置可以补偿系统不可变动部分(由控制对象、执行机构和量测部件组成的部分)在特性上的缺陷,使校正后的控制系统能满足事先要求的性能指标。
常用的性能指标形式可以是时间域的指标,如上升时间、超调量、过渡过程时间等(见过渡过程),也可以是频率域的指标,如相角裕量、增益裕量(见相对稳定性)、谐振峰值、带宽(见频率响应)等。
常用的串联校正装置有超前校正、滞后校正、滞后-超前校正三种类型。
在许多情况下,它们都是由电阻、电容按不同方式连接成的一些四端网络。
各类校正装置的特性可用它们的传递函数来表示,此外也常采用频率响应的波德图来表示。
不同类型的校正装置对信号产生不同的校正作用,以满足不同要求的控制系统在改善特性上的需要。
在工业控制系统如温度控制系统、流量控制系统中,串联校正装置采用有源网络的形式,并且制成通用性的调节器,称为PID (比例-积分-微分)调节器,它的校正作用与滞后-超前校正装置类同。
目录摘要 (1)ABSTRACT (2)1课程设计目的及要求 (3)1.1目的 (3)1.2要求 (3)1.3方案比较分析 (3)2设计计算与分析 (3)2.1计算幅值与相位裕度 (4)2.2使用MATLA软件获得系统的伯德图和相位,幅值裕度。
(4)3确定校正网络传递函数 (6)3.1 滞后超前校正设计 (6)3.2校验校正后系统是否满足要求 (6)4.校正前后系统根轨迹的绘制 (7)4.1校正前系统根轨迹 (7)4.2校正后系统的根轨迹分析 (8)5系统动态性能的分析 (9)5.1校正前系统的动态性能分析 (9)5.2校正后系统的动态性能分析 (10)心得体会 (13)参考文献 (14)摘要在现代科学技术的众多领域中,自动控制技术起着越来越重要的作用,而自动控制理论是自动控制科学的核心。
题 目: 转子绕线机控制系统的串联滞后超前校正设计 初始条件:已知转子绕线机控制系统的开环传递函数是)15)(5()(++=s s s Ks G要求系统的静态速度误差系数120v K s -≥,相角裕度ο60≥γ。
要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)(1) MATLAB 作出满足初始条件的最小K 值的系统伯德图,计算系统的幅值裕度和相位裕度。
(2) 前向通路中插入一滞后超前校正装置,确定校正网络的传递函数。
(3) 用MATLAB 画出未校正和已校正系统的根轨迹。
(4) 用Matlab 对校正前后的系统进行仿真分析,画出阶跃响应曲线,计算其时域性能指标。
(5) 对上述任务写出完整的课程设计说明书,说明书中必须进行原理分析,写清楚分析计算的过程及其比较分析的结果,并包含Matlab 源程序或Simulink 仿真模型,说明书的格式按照教务处标准书写。
时间安排:指导教师签名: 年 月 日 系主任(或责任教师)签名: 年 月 日目录摘要 ............................................................ 13 1 滞后-超前校正的原理 . (14)2 串联滞后-超前校正Bode图设计方法 (15)3 校正前系统分析 (16)3.1校正前系统的Bode图 (16)3.2校正前系统的根轨迹图 (17)3.3校正前系统的阶跃响应曲线 (17)4 滞后-超前校正后的传递函数确定 (19)4.1确定滞后校正网络的参数 (19)4.2确定超前校正网络的参数 (19)4.3确定校正后的传递函数 (19)4.4滞后-超前传递函数计算 (20)5 校正后系统分析 (21)5.1校正后系统的Bode图 (21)5.2校正后系统的根轨迹图绘制 (22)5.3校正后系统的阶跃响应曲线 (23)总结 (24)参考文献 (25)本科生课程设计成绩评定表......................... 错误!未定义书签。
指导教师评定成绩:审定成绩:自动控制原理课程设计任务书设计题目:转子绕线机控制系统的校正设计仿真学院自动化专业电气工程与自动化姓名周密学号2012212660指导教师李鹏华2014年 11 月 4 日目录1、设计题目 (2)1.1课程设计应达到的目的 (2)1.2课程设计题目及要求 (2)1.3课程设计任务 (3)2、设计报告正文 (4)2.1 设计步骤 (4)2.1.1 工作原理及总体设计 (4)2.1.2 开环系统 (4)2.1.3 各环节的放大级数及其时间常数 (6)2.1.4 系统扰动分析 (7)2.1.5 比较开环时和闭环时的动态响应。
(7)2.1.6 采用某种校正方式实现系统的稳定控制 (10)2.1.7 建议和意见 (17)3、设计总结 (19)4、参考文献 (20)5、附录 (21)1、设计题目题目:转子绕线机控制系统的校正设计仿真 1.1课程设计应达到的目的1、通过控制系统闭环仿真熟悉课程设计的基本流程;2、掌握控制系统的数学建模;3、掌握控制系统性能的根轨迹分析或时域特性分析;4、掌握频率法校正或根轨迹法校正;5、能够根据性能指标,设计控制系统,并完成相应实验验证系统的设计和实验操作;6、学会用MATLAB 进行基本仿真。
1.2课程设计题目及要求(一)设计题目转子绕线机控制系统的开环传递函数:)10)(5()(++=s s s Ks G要求达到性能指标:系统的静态速度误差系数115-≥s K v , 60≥γ。
(二)设计要求1.分析系统的工作原理,进行系统总体设计。
2.构成开环系统,并分析器动态响应。
3.测出各环节的放大倍数及其时间常数。
4.对系统进行扰动分析。
5.比较开环时和闭环时的动态响应。
6. 采用某种校正方式实现系统的稳定控制。
7.对本课程设计提出新设想和新建议。
1.3课程设计任务(1)复习有关教材、到图书馆查找有关资料,了解控制对象的工作原理。
(2)总体方案的构思根据设计的要求和条件进行认真分析与研究,找出关键问题。
课程设计课程设计任务书学生姓名:化学院题目: 转子绕线机控制系统的滞后校正设计初始条件:已知转子绕线机控制系统的开环传递函数为:要求系统的静态速度误差系数151-≥s K v ,相位裕度 56≥γ。
要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)1、 用MATLAB 作出满足初始条件的最小K 值的系统的伯德图,计算系统的幅值裕度和相位裕度。
2、 前向通路中插入一相位滞后校正,确定校正网络的传递函数。
3、 用MATLAB 画出未校正和已校正系统的根轨迹。
4、 用MATLAB 对校正前后的系统进行仿真分析,画出阶跃响应曲线,计算其时域性能指标。
5、 课程设计说明书中要求写清楚计算分析的过程,列出MATLAB 程序和MATLAB 输出。
说明书的格式按照教务处标准书写。
时间安排:指导教师签名: 年 月 日系主任(或责任教师)签名: 年 月 日)01)(1()(++=s s s Ks G目录摘要 ----------------------------------------------- 1 1设计目的、要求及原理------------------------------ 21.1设计目的-------------------------------------- 21.2 设计要求------------------------------------- 21.3设计原理-------------------------------------- 2 2设计分析与计算------------------------------------ 32.1最小K值的系统频域分析------------------------ 32.2滞后校正函数计算------------------------------ 4 3用MATLAB画校正前后的轨迹------------------------- 83.1校正前的根轨迹-------------------------------- 83.2校正后的根轨迹-------------------------------- 9 4用Matlab对校正前后的系统进行仿真分析------------ 114.1校正前系统----------------------------------- 114.2校正后系统----------------------------------- 13 心得体会 ------------------------------------------ 15 参考文献 ------------------------------------------ 16摘要自动控制技术已广泛应用于制造业、农业、交通、航空及航天等众多产业部门,极大地提高了社会劳动生产率,改善了人们的劳动条件,丰富和提高了人民的生活水平。
在控制工程中用得最广的是电气校正装置,它不但可应用于电的控制系统,而且通过将非电量信号转换成电量信号,还可应用于非电的控制系统。
控制系统的设计问题常常可以归结为设计适当类型和适当参数值的校正装置。
校正装置可以补偿系统不可变动部分(由控制对象、执行机构和量测部件组成的部分)在特性上的缺陷,使校正后的控制系统能满足事先要求的性能指标。
常用的性能指标形式可以是时间域的指标,如上升时间、超调量、过渡过程时间等(见过渡过程),也可以是频率域的指标,如相角裕量、增益裕量(见相对稳定性)、谐振峰值、带宽(见频率响应)等。
常用的串联校正装置有超前校正、滞后校正、滞后-超前校正三种类型。
在许多情况下,它们都是由电阻、电容按不同方式连接成的一些四端网络。
各类校正装置的特性可用它们的传递函数来表示,此外也常采用频率响应的波德图来表示。
不同类型的校正装置对信号产生不同的校正作用,以满足不同要求的控制系统在改善特性上的需要。
在工业控制系统如温度控制系统、流量控制系统中,串联校正装置采用有源网络的形式,并且制成通用性的调节器,称为PID(比例-积分-微分)调节器,它的校正作用与滞后-超前校正装置类同。
摘要 (1)ABSTRACT (2)1 课程设计目的及要求 (3)1.1目的 (3)1.2要求 (3)1.3方案比较分析 (3)2 设计计算与分析 (3)2.1计算幅值与相位裕度 (4)2.2使用MATLAB软件获得系统的伯德图和相位,幅值裕度。
(4)3 确定校正网络传递函数 (6)3.1滞后超前校正设计 (6)3.2校验校正后系统是否满足要求 (6)4. 校正前后系统根轨迹的绘制 (7)4.1校正前系统根轨迹 (7)4.2校正后系统的根轨迹分析 (8)5 系统动态性能的分析 (9)5.1校正前系统的动态性能分析 (9)5.2校正后系统的动态性能分析 (10)心得体会 (13)参考文献 (14)摘要在现代科学技术的众多领域中,自动控制技术起着越来越重要的作用,而自动控制理论是自动控制科学的核心。
课程设计任务书学生姓名: 专业班级:指导教师: 刘志立 工作单位: 自动化学院 题 目: 转子绕线机控制系统的串联滞后-超前校正设计 初始条件:已知转子绕线机控制系统的开环传递函数:)10)(5()(++=s s s K s G 要求系统的静态速度误差系数115-≥s K v , 60≥γ。
要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)1、 M ATLAB 作出满足初始条件的最小K 值的系统伯德图,计算系统的幅值裕度和相位裕度。
2、 前向通路中插入一滞后超前校正装置,确定校正网络的传递函数。
3、 用Matlab 画出未校正和已校正系统的根轨迹。
4、 用Matlab 对校正前后的系统进行仿真分析,画出阶跃响应曲线,计算其时域性能指标。
5、 课程设计说明书中要求写清楚计算分析的过程,列出MATLAB 程序和MATLAB 输出。
说明书的格式按照教务处标准书写。
时间安排:指导教师签名: 年 月 日系主任(或责任教师)签名: 年 月目录摘要 (1)1初始条件 (2)2设计任务 (2)3设计原理 (2)4设计分析与计算 (2)4.1最小K值的系统频域分析 (2)4.2滞后—超前校正网络的确定 (4)4.3根轨迹的绘制 (5)4.4系统仿真 (7)心得体会 (10)参考文献 (11)摘要MATLAB是矩阵实验室的简称,是一个在数值计算方面首屈一指的数学类科技应用软件。
利用MATLAB对自动控制系统进行分析求解十分简便。
本次课程设计是利用滞后-超前校正网络来校正系统以改善系统性能,首先应该根据原有系统和初始条件要求来确定校正系统,然后利用MATLAB分析校正后的系统是否达到要求以及其性能。
关键词:MATLAB 滞后—超前校正系统分析转子绕线机控制系统的串联滞后-超前校正设计1初始条件已知转子绕线机控制系统的开环传递函数:)10)(5()(++=s s s K s G 要求系统的静态速度误差系数115-≥s K v , 60≥γ。
自动控制技术是生产过程中的关键环节,也是许多高新技术产品的核心技术。
自动控制技术广泛应用于制造业、农业、交通、航空及航天等众多产业部门,极大的提高了社会劳动生产率,改善了人们的劳动条件,丰富和提高了人民的生活水平研究分析系统有时域分析法和频率法。
时域分析是通过求解系统的微分方程来研究和分析系统,而频率法可以直观的分析系统的稳定性。
在此次课程设计中需要对系统进行频域分析,通过引入滞后校正,利用滞后校正的高频衰减的特性,降低截止频率,提高相位裕度,不影响频率特性的低频段。
由此可见,滞后校正在一定的条件下,也能使系统同时满足动态和静态的要求。
可运用于以下场所:1.在系统响应速度要求不高而抑制噪声电平性能要求较高的情况下,可考虑采用串联滞后校正。
2.保持原有的已满足要求的动态性能不变,而用以提高系统的开环增益,减小系统的稳态误差。
MATLAB是矩阵实验室(Matrix Laboratory)的简称,是美国MathWorks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,主要包括MATLAB和Simulink两大部分。
MATLAB在自动控制理论诸多数据分析研究、数学模型的运算、数据的分析、模拟实验等过程中有着广泛的应用。
怎样确定控制系统的性能指标是控.制系统的分析问题,怎样使自动控制系统的性能指标满足设计要求是控制系统的设计与改造问题。
用MATLAB辅助计算可以大大节省时间,方便系统设计。
前言 (1)任务书 (3)1、利用MATLAB进行系统的频域分析1.1绘制满足初始条件最小K值的bode图 (4)1.2相位裕度和截止频率 (5)2、相位滞后校正网络传递函数 (7)3、用MATLAB画根轨迹3.1校正前系统根轨迹 (7)3.2校正后系统根轨迹 (9)4、检验校正结果 (10)体会与收获 (12)课程设计任务书题 目: 转子绕线机控制系统的滞后校正设计。
「转子绕线机控制系统的滞后校正设计」转子绕线机控制系统是一种用于电动机转子绕线的设备,通过对转子绕线过程中的参数进行控制,可以提高绕线质量和效率。
在转子绕线机控制系统中,滞后校正是一种常用的控制方法,用于对系统的误差进行校正,以使系统更加稳定和准确。
滞后校正是一种基于反馈控制的校正方法,其基本原理是通过测量系统输出与期望输出之间的差异,对系统的控制输入进行修正。
在转子绕线机控制系统中,通常采用位置传感器来测量转子位置,然后与期望位置进行比较,计算出位置误差。
通过引入滞后校正,可以根据位置误差来调整转子绕线的参数,以达到更好的绕线质量和效率。
滞后校正的设计可以分为几个步骤:首先,需要确定滞后校正的目标。
在转子绕线机控制系统中,滞后校正的目标通常是使转子绕线达到最佳质量,并且尽可能减少绕线时间和浪费。
因此,滞后校正应该针对这些目标进行设计。
其次,需要选择合适的控制算法。
在滞后校正中,通常采用比例-积分-微分(PID)控制算法来对转子绕线机控制系统进行控制。
PID控制算法可以根据位置误差的大小来调整控制输入,使系统的输出更接近期望输出。
然后,需要确定滞后校正的参数。
在PID控制算法中,有三个参数需要进行调整:比例增益、积分时间和微分时间。
比例增益用于调整控制输入与位置误差之间的关系,积分时间用于调整系统对误差的积累程度,微分时间用于调整系统对误差变化率的敏感程度。
通过调整这些参数,可以获得较好的滞后校正效果。
最后,需要进行滞后校正的实施和调试。
在实施滞后校正之前,需要对滞后校正的参数进行合理的选择,并进行调试和优化。
通过不断调整滞后校正的参数,可以使转子绕线机控制系统获得更好的控制效果。
综上所述,滞后校正是一种用于转子绕线机控制系统的常用控制方法,通过对系统误差进行校正,可以提高绕线质量和效率。
在滞后校正的设计中,需要确定校正目标、选择合适的控制算法、确定参数,并进行实施和调试。
通过合理的滞后校正设计,可以使转子绕线机控制系统达到最佳的控制效果。
绕线机作业指导书一、背景介绍绕线机是一种用于电子元件创造的设备,主要用于将电线或者导线绕制在特定的电子元件上,如电感器、变压器等。
本作业指导书旨在提供详细的操作步骤和注意事项,以确保绕线机的正确使用和操作。
二、操作步骤1. 准备工作a. 确保绕线机处于稳定的工作台上,并且连接好电源。
b. 检查绕线机的各个部件是否完好无损,如绕线头、导线夹等。
c. 准备好需要使用的电线或者导线,并确保其质量符合要求。
2. 调整绕线机参数a. 打开绕线机的电源开关,确保电源指示灯亮起。
b. 根据绕线要求,调整绕线机的速度、张力和绕线头的位置。
c. 确保绕线机的参数调整到适当的数值,以保证绕线的质量和效率。
3. 安装导线夹a. 将导线夹固定在绕线机的导线夹支架上,确保夹紧力适中。
b. 检查导线夹的夹口是否干净,无杂质,以确保导线夹能够坚固夹住电线。
4. 开始绕线a. 将需要绕线的电子元件放置在绕线机的工作台上,并调整其位置。
b. 将一段电线的一端夹在导线夹中,并确保夹紧力适中。
c. 打开绕线机的启动开关,开始绕线。
d. 控制绕线机的速度和张力,确保电线能够平稳、均匀地绕制在电子元件上。
e. 根据绕线要求,绕制所需的圈数或者长度。
5. 完成绕线a. 绕线完成后,关闭绕线机的启动开关,住手绕线。
b. 将绕制好的电子元件从绕线机的工作台上取下。
c. 检查绕线质量,如有不符合要求的地方,进行修正或者重新绕线。
6. 清洁和维护a. 关闭绕线机的电源开关,断开电源连接。
b. 清洁绕线机的各个部件,如绕线头、导线夹等,确保其无灰尘和杂质。
c. 定期检查和保养绕线机的各个部件,如润滑轴承、更换磨损的零部件等。
三、注意事项1. 在操作绕线机之前,必须穿戴好个人防护设备,如手套、安全眼镜等。
2. 在调整绕线机参数时,务必小心谨慎,避免发生意外或者损坏设备。
3. 在绕线过程中,要保持专注和集中注意力,避免分心或者疏忽造成质量问题。
4. 在绕线机运行时,不要将手指或者其他物体挨近绕线头或者运动部件,以免发生伤害。
转子绕线机控制系统的滞后校正设1. 设计目的首先,通过对转子绕线机控制系统的分析,加强对转子绕线机控制系统的 认识,并掌握滞后校正设计的方法。
其次,通过设计,培养分析问题解决问题的 能力。
此外,使用MATLAB^件进行系统仿真,从而进一步掌握 MATLA 的使用2. 设计任务及要求已知转子绕线机控制系统的开环传递函数为:要求系统的静态速度误差系数K -15s,相角裕度-5°要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等 具体要求)① MATLAB 作出满足初始条件的最小 K 值的系统伯德图,计算系统的幅值裕度和相位裕度。
② 前向通路中插入一相位滞后校正,确定校正网络的传递函数 ③ 用MATLAB 画出未校正和已校正系统的根轨迹。
②用MATLAB 对校正前后的系统进行仿真分析,画出阶跃响应曲线,计 算其时域性能指标。
课程设计说明书中要求写清楚计算分析的过程,列出MATLAB 程序和MATLAB 输出。
3. 设计方案论证当控制系统的性能指标不能满足期望的特性指标时,需要在已选定的系统 不可变部分(包括测量元件,比较元件,放大元件及执行机构等)的基础上加入 一些装置(即校正装置),使系统能满足各项性能指标。
3.1校正前系统分析用MATLA 作出满足初始条件的最小 K 值的系统伯德图,计算系统的幅值裕G(s)二K s(s 2)( s 10)度和相位裕度。
首先,确定k 值:k - 300则可得到满足初始条件的最小 K 值: k=300那么满足初始条件的最小K 值的系统开环传递函数为:用MATLAB^件作出校正前满足初始条件的最小 k 值的系统伯德图如下MATLAB?序:k0=300;n1=1;d 仁conv(con v([1 0],[1 2]),[1 10]); [mag,phase,w]=bode(kO* n1,d1); figure(1);margi n( mag,phase,w);人=limn sG (s )=limsks(s 2)(s 10)k 20k v -15k 20G(s)=300 s(s 2)(s 10)15 ______ s(0.1s 1)(0.5s 1)图3-1 :校正前满足初始条件的最小 k 值的系统伯德图由伯德图可知系统的幅值裕度G^ -1.94dB」穿越频率W ^4-47rad S" 相角裕度P m 八4.61deg 截止频率W厂4.98rad S"3.2选择校正方案前向通路中插入一相位滞后校正,确定校正网络的传递函数。
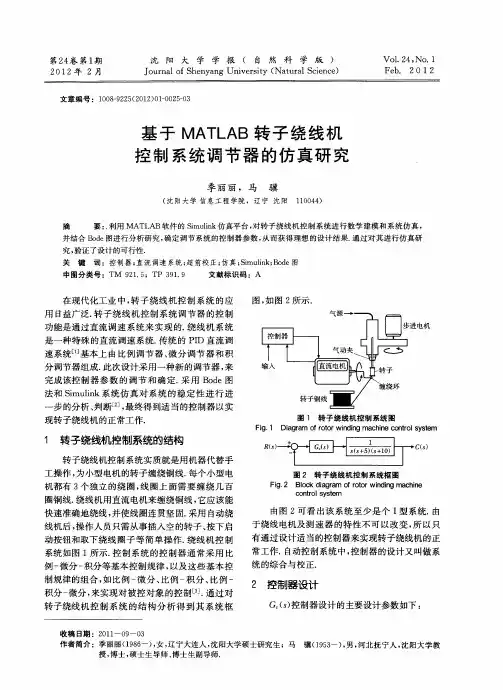
G603 转子绕线机控制系统设转子绕线机控制系统如图1 (a)所示,图1 (b)为相应的结构图,绕线机用直流电机来缠绕铜线,能快速准确地绕线,并使线圈连贯坚固。
采用自动绕线机后,操作人员只需从事插入空的转子,按下启动按钮盒取下绕好线的转子等简单操作。
图1 转子绕线机控制器设计的具体要求是:)(s G c 1) 系统对斜坡输入响应的稳态误差小于10%,静态速度误差系数10=v K ;2) 系统对阶跃输入的超调量在10%左右;3) 按%2=∆要求的系统调节时间为3s 左右。
解:由图1 (b)可见,系统为I 型系统,在单位斜坡输入作用下,稳态误差vK 1)(=∞ss e 式中 50)(K lim 0v S G c s →=)(S G c 为待设计的控制器(校正网络)。
首先考虑采用简单的增益放大器,1)(K S G c =,则系统的速度误差1K 50)(=∞ss e 可见为了提高系统的稳态精度,必须采用高增益,但过高的对系统的稳定性和动态性能都会产生不利的影响。
图2给出了不同值下的系统响应,可看出,当时,系统的,1K 1K 5001=K 10=v K %01)(=∞ss e ,刚好满足设计要求,但系统对阶跃输入的%70%=σ,,远大于设计指标值。
因此必须采用较为复杂的校正网络。
8s =s t图2 简单增益器的瞬态响应由于超前校正网络能改善系统的动态响应性能,因此常时选用如下超前校正网络:)1()1()()()(11T s aT s K p s z s K s G c ++=++=,且aT z 1=,Tp 1=,故az p =p z <式中,。
系统校正后的开环传递函数为 ))(10)(5()()(1p s s s s z s K s G ++++=根据主导极点思想,可将校正后的系统等价为二阶系统。
由%σ及要求,可近似求出系统的阻尼比s t ζ及要求的相角裕度γ。
由性能指标要求值:、无阻比自然频率n ω%10%100%21/==--ζπζσe %)2(34.4=∆==s t n s ζω59.0=ζ,49.2=n ω,再由公式 解得242412arctanζζζγ-+= 求出。
指导教师评定成绩:
审定成绩:
自动控制原理
课程设计任务书设计题目:转子绕线机控制系统的校正设计仿真
单位(二级学院):自动化学院
专业:电气工程与自动化
姓名:周密
学号: 2012212660 指导教师:李鹏华
设计时间:2014年10月
重庆邮电大学自动化学院制
目录
一、设计题目
1.1 设计题目及要求
1.2 设计任务
二、设计报告正文
2.1摘要
2.2设计步骤
1.分析系统的工作原理,进行系统总体设计。
//白松其、刘有为2.构成开环系统,并分析器动态响应。
//李盼盼
3.测出各环节的放大倍数及其时间常数。
//吴杰、庄元
4.对系统进行扰动分析。
//邓振扬
5.比较开环时和闭环时的动态响应。
//周密、朱俊
6. 采用某种校正方式实现系统的稳定控制。
//王翰磊
7.对本课程设计提出新设想和新建议。
//罗俊豪
三、设计总结
一、设计题目
题目:转子绕线机控制系统的校正设计仿真
设计步骤
1、实验原理//刘有为、白松其
转子绕线机控制系统
总体设计框图为:
R(s)K11/s(s+5)(s+10)C(s) —。