仿真技术实验程序及思考题解答完整版汇总
- 格式:doc
- 大小:180.00 KB
- 文档页数:13

实验一 MATLAB 软件操作练习一、 实验目的1. 熟悉MATLAB 软件的基本操作;2. 学会利用MATLAB 进行基本数学计算的方法;3. 学会用MATLAB 进行矩阵创建和运算。
二、实验设备计算机一台,MATLAB 软件三、实验内容1. 使用help 命令,查找 sqrt (开方)、roots (求根)等函数的使用方法;2. 用MATLAB 可以识别的格式输入以下矩阵75350083341009103150037193......A ⎡⎤⎢⎥⎢⎥=⎢⎥-⎢⎥⎣⎦并将A 矩阵的右下角2×3子矩阵赋给D 矩阵。
赋值完成后,调用相应的命令查看MATLAB 工作空间的占用情况。
3. 矩阵运算(1)矩阵的乘法已知A=[1 2;3 4]; B=[5 5;7 8];求A^2*B(2)矩阵除法已知 A=[1 2 3;4 5 6;7 8 9];B=[1 0 0;0 2 0;0 0 3];A\B,A/B(3)矩阵的转置及共轭转置已知A=[5+i,2-i,1;6*i,4,9-i];求A.', A'(4)使用冒号选出指定元素已知: A=[3 2 3;2 4 6;6 8 10];求A 中第3列前2个元素;A 中所有列第2,3行的元素;4. 分别用for 和while 循环结构编写程序,求出6323626302122222i i K ===++++++∑并考虑一种避免循环的简洁方法来进行求和。
四、实验步骤1. 熟悉MATLAB 的工作环境,包括各菜单项、工具栏以及指令窗口、工作空间窗口、启动平台窗口、命令历史窗口、图形文件窗口和M 文件窗口;2. 在指令窗口中完成实验内容中规定操作并记录相关实验结果;3. 完成实验报告。
实验二 M 文件编程及图形处理一、实验目的1.学会编写MATLAB 的M 文件;2.熟悉MATLAB 程序设计的基本方法;3. 学会利用MATLAB 绘制二维图形。
二、实验设备计算机一台,MATLAB 软件三、实验内容1. 选择合适的步距绘制出下面的图形(1)sin(tan )tan(sin )t t -,其中(,)t ππ∈-(2)-0.5t y=e sin(t-)3π,t ∈[0,20](3)在同一坐标系中绘制余弦曲线y=cos(t-0.25)和正弦曲线y=sin(t-0.5), t ∈[0,2π]2.基本绘图控制绘制[0,4π]区间上的x1=10sint 曲线,并要求:(1)线形为点划线、颜色为红色、数据点标记为加号;(2)给横坐标标注’t ’,纵坐标标注‘y(t)‘,3.M 文件程序设计(1)编写程序,计算1+3+5+7+…+(2n+1)的值(用input 语句输入n 值);(2)编写分段函数⎪⎩⎪⎨⎧≤≤-<≤=其它021210)(x x x x x f的函数文件,存放于文件ff.m 中,计算出)2(f ,)3(-f 的值四、实验要求1. 预习实验内容,按实验要求编写好实验程序;2. 上机调试程序,记录相关实验数据和曲线,3. 完成实验报告。
一、离心泵思考题1.离心泵操作不当会出现“气蚀”与“气缚”现象。
分析产生这两种现象的原因、现象、解决方法。
答案:气蚀:当液体在与固体表面接触处的压力低于它的蒸汽压力时,将在固体表面附近形成气泡。
另外,溶解在液体中的气体也可能析出而形成气泡。
随后,当气泡流动到液体压力超过气泡压力的地方时,气泡变溃火,在溃火瞬时产生极大的冲击力和高温。
固体表面经受这种冲击力的多次反复作用,材料发生疲劳脱落,使表面出现小凹坑,进而发展成海绵状。
严重的其实可在表面形成大片的凹坑,深度可达20inmo气蚀的机理是由于冲击应力造成的表面疲劳破坏,但液体的化学和电化学作用加速了气蚀的破坏过程。
减少气蚀的有效措施是防止气泡的产生。
首先应使在液体中运动的表面具有流线形,避免在局部地方出现涡流,因为涡流区压力低,容易产生气泡。
此外,应当减少液体中的含气量和液体流动中的扰动,也将限制气泡的形成。
选择适当的材料能够提高抗气蚀能力。
通常强度和韧性高的金属材料具有较好的抗气蚀性能,提高材料的抗腐蚀性也将减少气蚀破坏。
气缚:离心泵启动时,若泵内存有空气,由于空气密度很低,旋转后产生的离心力小, 因而叶轮中心区所形成的低压不足以将储槽内的液体吸入泵内,虽启动离心泉也不能输送液体。
此种现象称为气缚,表示离心泉无自吸能力,所以必须在启动前的壳内灌满液体。
如何防止离心泵的气缚现象?答:在启动前向壳内灌满液体。
做好壳体的密封工作,灌水的阀门和莲蓬头不能漏水密封性要好。
为了使泵内充满液体,通常在吸入管底部安装一带滤网的底阀,该底阀为止逆阀, 滤网的作用是防止固体物质进入泉内损坏叶轮或妨碍泉的正常操作。
2.启动与停止离心泉时,泵的出口幽应处于什么状态?为什么?答案:离心泵在排出管路瓣门关闭状态下启动,因为离心泉是靠叶轮离心力形成真空的吸力把水提起,所以,离心泵启动时,必须先把闸阀关闭,灌水。
水位超过叶轮部位以上,排出离心泉中的空气,才可启动。
启动后,叶轮周围形成真空,把水向上吸,其闸阀可自动打开, 把水提起。
实验项目及学时安排实验一 MATLAB环境的熟悉与基本运算 2学时实验二 MATLAB数值计算实验 2学时实验三 MATLAB数组应用实验 2学时实验四 MATLAB符号计算实验 2学时实验五 MATLAB的图形绘制实验 2学时实验六 MATLAB的程序设计实验 2学时实验七 MATLAB工具箱Simulink的应用实验 2学时实验八 MATLAB图形用户接口GUI的应用实验 2学时实验一 MATLAB环境的熟悉与基本运算一、实验目的1.熟悉MATLAB开发环境2.掌握矩阵、变量、表达式的各种基本运算二、实验基本知识1.熟悉MATLAB环境:MATLAB桌面和命令窗口、命令历史窗口、帮助信息浏览器、工作空间浏览器、文件和搜索路径浏览器。
2.掌握MATLAB常用命令3.MATLAB变量与运算符变量命名规则如下:(1)变量名可以由英语字母、数字和下划线组成(2)变量名应以英文字母开头(3)长度不大于31个(4)区分大小写MATLAB中设置了一些特殊的变量与常量,列于下表。
MATLAB运算符,通过下面几个表来说明MATLAB的各种常用运算符4.MATLAB的一维、二维数组的寻访表6 子数组访问与赋值常用的相关指令格式5.MATLAB的基本运算表7 两种运算指令形式和实质内涵的异同表6.MATLAB的常用函数表8 标准数组生成函数表9 数组操作函数三、实验内容1、学习使用help命令,例如在命令窗口输入help eye,然后根据帮助说明,学习使用指令eye(其它不会用的指令,依照此方法类推)2、学习使用clc、clear,观察command window、command history和workspace等窗口的变化结果。
3、初步程序的编写练习,新建M-file,保存(自己设定文件名,例如exerc1、exerc2、exerc3……),学习使用MA TLAB的基本运算符、数组寻访指令、标准数组生成函数和数组操作函数。
仿真实验 / 落球法测定液体的粘度一、实验目的(1)观察液体的粘滞现象;(2)用落球法测量不同温度下蓖麻油的粘度;(3)巩固使用基本测量仪器的技能;(4)了解PID温度控制的原理。
二、实验仪器变温黏度测量仪,ZKY-PID温控实验仪,停表,螺旋测微器,钢球若干,金属镊子。
三、实验原理1.落球法测定液体黏度原理一个在静止液体中下落的小球受到重力、浮力和黏滞阻力3个力的作用,如果小球的速度v很小,且液体可以看成在各方向上都是无限广阔的,则从流体力学的基本方程可以导出表示黏滞阻力的斯托克斯公式:(1)(1)式中d为小球直径。
由于黏滞阻力与小球速度v成正比,小球在下落很短一段距离后,所受外力达到平衡,小球将以匀速下落,此时有:(2)式中ρ为小球密度,ρ为液体密度。
由(2)式可解出黏度η的表达式:(3)本实验中,小球在直径为D的玻璃管中下落,液体在各方向无限广阔的条件不满足,此时黏滞阻力的表达式可加修正系数(1+2.4d/D),而(3)式可修正为:(4)当小球的密度较大,直径不是太小,而液体的黏度值又较小时,小球在液体会达到较大的值,奥西思-果尔斯公式反映出了液体运动状态对中的平衡速度v斯托克斯公式的影响:(5)其中,Re称为雷诺数,是表征液体运动状态的无量纲参数。
(6)当Re小于0.1时,可认为(1)、(4)式成立。
当0.1<Re<1时,应考虑(5)式中1级修正项的影响,当Re大于1时,还须考虑高次修正项。
考虑(5)式中1级修正项的影响及玻璃管的影响后,黏度η1可表示为:(7)由于3Re/16是远小于1的数,将1/(1+3Re/16)按幂级数展开后近似为1-3Re/16,(7)式又可表示为:(8)已知或测量得到ρ、ρ、D、d、v等参数后,由(4)式计算黏度η,再由(6)式计算Re,若需计算Re的1级修正,则由(8)式计算经修正的黏度η1。
在国际单位制中,η的单位是Pa·s(帕斯卡·秒),在厘米,克,秒制中,η的单位是P(泊)或cP(厘泊),它们之间的换算关系是:1Pa·s=10P=1000cP (9)2.PID条件控制PID调节是自动控制系统中应用最为广泛的一种调节规律,自动控制系统的原理可用图1说明。
姓名:陈莺冰学号:31314217班级:物流142成绩:实验名称:认识Witness仿真软件建模环境一、实验思考题1、Witness系统有哪几个主菜单项?答:witness系统主菜单有:File菜单项、Edit菜单项、View菜单项、Model菜单项、Elements菜单项、Reports菜单项、Run菜单项、Window菜单项、Help菜单项。
2、Witness系统默认打开的文件是什么?答:系统默认打开文件是STARTUP:Basic Model.3、Witness系统界面包括哪几个窗口?答:系统界面窗口有:元素选择窗口、用户元素窗口。
4、Witness系统有多少类建模元素?答:Witness系统建模元素主要有:离散型、连续型、运输逻辑型、逻辑型和图形元素。
5、如何打开和关闭Witness系统的工具栏?答:打开工具栏需使用菜单View/Toolbars选中相应菜单则打开;关闭工具栏则使用菜单View/Toolbars将选中的工具栏撤销即可。
6、如何通过工具栏控制仿真时长?答:在仿真运行钟旁输入仿真时间,即可控制仿真时长。
7、Stage4. mod仿真项目中用到了哪几类建模元素?答:用到的建模元素有:part、machine、labor、conveyor。
二、对Stage4模型进行描述答:零部件经过称重、清洗、加工、包装,最后离开系统。
称重、清洗、加工、包装的时间分别为5、4、3、7分钟。
加工与包装之间采用带传动,输送链长度为40个单位,速度为1分钟/单位长度。
包装过程需要工人进行包装,运行1440分钟,检查加工零件的个数。
假设 wash机器在工作一定的时间后,可能会发生意外的故障,通过以往机器两次故障时间间隔的统计发现,其时间间隔服从最小值为100,最大值为300的整数均匀分布;每当机器故障时,都需要人员对它进行维修,维修过程所持续的时间受到故障诊断时间、故障排除的难易程序、维修人员的生理和心理状态的影响,呈现随机波动性,统计数据表明维修时间服从最小值为30,最可能发生值为60,最大值为120的三角分布。
目录实验一Matlab使用方法和程序设计 (2)实验二控制系统分析(一) (8)实验三控制系统分析(二) (17)实验四控制系统根轨迹法设计仿真 (27)实验五控制系统Bode图法设计仿真 (31)实验六SIMULINK仿真 (36)实验七连续系统的仿真分析 (39)实验八S-函数的编写及应用 (41)实验九图形用户界面设计 (44)实验十数字仿真技术的应用 (47)实验十一、控制系统最优化的计算机辅助设计 (48)附录A:控制设计MA TLAB常用函数 (49)附录B:MATLAB命令大全......................................................................... 错误!未定义书签。
实验一Matlab使用方法和程序设计一、实验目的:1、掌握Matlab软件使用的基本方法;2、熟悉Matlab的数据表示、基本运算和程序控制语句;3、熟悉Matlab绘图命令及基本绘图控制;4、熟悉Matlab程序设计的基本方法。
二、实验内容:1、帮助命令使用help命令,查找 sqrt(开方)函数的使用方法;2、矩阵运算(1)矩阵的乘法已知A=[1 2;3 4]; B=[5 5;7 8];求A^2*B解答:>> A=[1 2;3 4]; B=[5 5;7 8];A^2*Bans =105 115229 251(2)矩阵除法已知 A=[1 2 3;4 5 6;7 8 9]; B=[1 0 0;0 2 0;0 0 3];求A\B,A/B解答:>> A=[1 2 3;4 5 6;7 8 9]; B=[1 0 0;0 2 0;0 0 3];A\B,A/B ans =1.0e+016 *-0.4504 1.8014 -1.35110.9007 -3.6029 2.7022-0.4504 1.8014 -1.3511ans =1.0000 1.0000 1.00004.0000 2.5000 2.00007.0000 4.0000 3.0000(3)矩阵的转置及共轭转置已知A=[5+i,2-i,1;6*i,4,9-i];求A.', A'解答:>> A=[5+i,2-i,1;6*i,4,9-i]A.', A' (注:A.'是非共轭转置)A =5.0000 + 1.0000i 2.0000 - 1.0000i 1.00000 + 6.0000i 4.0000 9.0000 - 1.0000ians =5.0000 + 1.0000i 0 +6.0000i2.0000 - 1.0000i 4.00001.0000 9.0000 - 1.0000ians =5.0000 - 1.0000i 0 -6.0000i2.0000 + 1.0000i 4.00001.0000 9.0000 + 1.0000i(4)使用冒号选出指定元素已知:A=[1 2 3;4 5 6;7 8 9];求:A 中第3列前2个元素;A 中所有列第2,3行的元素;解答:>> A=[1 2 3;4 5 6;7 8 9];b=A(1:2,3),c=A(2:3,:)A =1 2 34 5 67 8 9b =36c =4 5 67 8 9(5)方括号[] 删除矩阵的元素用magic 函数生成一个4阶魔术矩阵,删除该矩阵的第四列;解答:>> d=magic(4),d(:,4)=[]d =16 2 3 135 11 10 89 7 6 124 14 15 1d =16 2 35 11 109 7 64 14 153、多项式(1) 求多项式42)(3--=x x x P 的根解答:>> p=[1 0 -2 -4],r=roots(p)p =1 0 -2 -4r =2.0000-1.0000 + 1.0000i-1.0000 - 1.0000i(2)已知A=[1.2 3 5 0.9;5 1.7 5 6;3 9 0 1;1 2 3 4],求矩阵A的特征多项式;求特征多项式中未知数为20时的值;把矩阵A作为未知数代入到多项式中;解答:>> A=[1.2 3 5 0.9;5 1.7 5 6;3 9 0 1;1 2 3 4],p=poly(A)A =1.2000 3.0000 5.0000 0.90005.0000 1.7000 5.00006.00003.0000 9.0000 0 1.00001.00002.00003.00004.0000矩阵A的特征多项式:p =1.0-6.9000 -77.2600 -86.1300 604.5500roots(p)特征多项式的根ans =13.0527-4.1671 + 1.9663i-4.1671 - 1.9663i2.1815eig(A) 矩阵的特征值(可见上、下两者一样)ans =13.0527-4.1671 + 1.9663i-4.1671 - 1.9663i2.1815求特征多项式中未知数为20时的值;解答:>> polyval(p,20)ans =7.2778e+004把矩阵A作为未知数代入到多项式中解答:>> polyvalm(p,A)ans =1.0e-010 *-0.0591 -0.0913 -0.0712 -0.0662-0.0909 -0.1273 -0.1065 -0.1023-0.0843 -0.1171 -0.0909 -0.0878-0.0523 -0.0777 -0.0621 -0.0603若把数组A作为未知数代入到多项式中解答:>> polyval(p,A)ans =1.0e+003 *0.3801 -0.4545 -1.9951 0.4601-1.9951 0.2093 -1.9951 -2.8880-0.4545 -4.8978 0.6046 0.43530.4353 0.0840 -0.4545 -1.16174、基本绘图命令(1)绘制余弦曲线y=cos(t),t∈[0,2π](2)在同一坐标系中绘制余弦曲线y=cos(t-0.25)和正弦曲线y=sin(t-0.5),t∈[0,2π];(1)解答:>> t=0:pi/100:2*pi;y=cos(t);plot(t,y),grid on解答:>>t=0:pi/100:2*pi;y1=cos(t-0.25);y2=sin(t-0.5);plot(t,y1,t,y2),grid on5、基本绘图控制绘制[0,4π]区间上的x1=10sint曲线,并要求:(1)线形为点划线、颜色为红色、数据点标记为加号;(2)坐标轴控制:显示范围、刻度线、比例、网络线;(3)标注控制:坐标轴名称、标题、相应文本;解答: >> t=0:0.5:4*pi;x1=10*sin(t);plot(t,x1,'r-.+')>> axis([0,4*pi,-10,10])>> set(gca,'Xtick',[0,4,8,10],'Ytick',[-8,0,8,max(x1)]) >> grid on>> xlabel('x','fontsize',8)%坐标轴名称:X,字号8>> ylabel('y','fontsize',12)%坐标轴名称:Y,字号12>> title('Value of the 10*sin(t)','fontsize',20)%标题名称6、基本程序设计(1)编写命令文件:计算1+2+3+…+n<2000时的最大n值;(2)编写函数文件:分别用for和while循环结构编写程序,求2的0到n次幂的和。
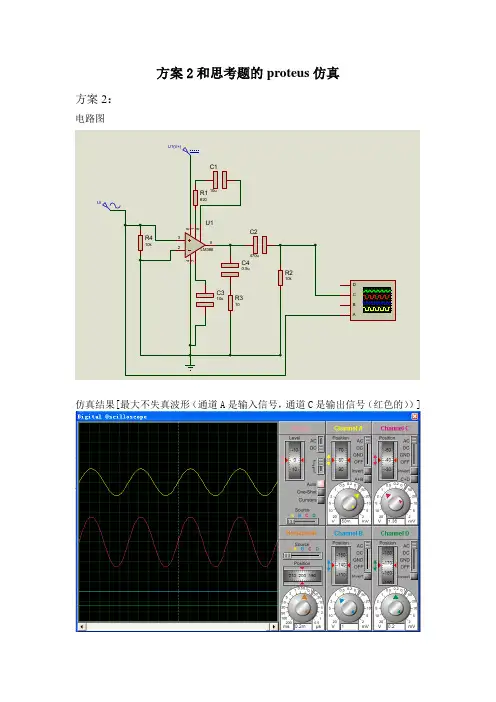
方案2和思考题的proteus仿真
方案2:
电路图
仿真结果[最大不失真波形(通道A是输入信号,通道C是输出信号(红色的))]
在恰好不失真的情况下:
输入信号Ui的有效值47.445mv,
输出Uo的有效值2.45v,Pomax=2.45*2.45/8=0.75w
电源提供电流IE为109.2mA,Pe=9*0.1092=0.9828w
η=0.75/0.9828=76.3%
η的理论值78.5%
由于仿真是在理想情况下进行的,所以效率η接近理论值,微小的误差来自对最大不失真波形的观察误差。
思考题:减小电阻R,能否提高效率η
把电阻改成400Ω
如果Ui仍为47.445mv,则输出的波形会失真(如下图所示)
调节Ui在最大不失真的情况下,测的输出Uo为2.42v和电阻R为620Ω时的Uo 2.45v,输出电压基本不变,所以输出功率基本不变,电源的功率基本不变。
所以减小电阻R,增大了电压增益,但不能提高效率。
1.精馏实验1.精馏操作回流比:越大越好越小越好以上两者都不对r2.精馏段与提馏段的理论板:精馏段比提馏段多精馏段比提馏段少两者相同不一定r3.当采用冷液进料时,进料热状况q值:q>1rq=10<q<1q=0q<04.全回流在生产中的意义在于:用于开车阶段采用全回流操作r产品质量达不到要求时采用全回流操作r用于测定全塔效率r5.精馏塔塔身伴热的目的在于:减小塔身向环境散热的推动力防止塔的内回流r加热塔内液体6.全回流操作的特点有:F=0,D=0,W=0r在一定分离要求下NT最少操作线和对角线重合7.本实验全回流稳定操作中,温度分布与哪些因素有关?当压力不变时,温度分布仅与组成的分布有关r温度分布仅与塔釜加热量有关系当压力不变时,温度分布仅与板效率、全塔物料的总组成及塔顶液与釜液量的摩尔量的比值有关8.判断全回流操作达到工艺要求的标志有:浓度分布基本上不随时间改变而改变r既不采出也不进料温度分布基本上不随时间改变而改变r9.塔压降变化与下列因素有关:气速r塔板型式不同r10.如果实验采用酒精-水系统塔顶能否达到98%(重量)的乙醇产品?(注:95.57%酒精-水系统的共沸组成)若进料组成大于95.57% 塔顶可达到98%以上的酒精若进料组成大于95.57% 塔釜可达到98%以上的酒精r若进料组成小于95.57% 塔顶可达到98%以上的酒精若进料组成大于95.57% 塔顶不能达到98%以上的酒精r11.冷料回流对精馏操作的影响为:XD增加,塔顶T降低rXD增加,塔顶T升高XD减少,塔顶T升高12.当回流比R<Rmin时,精馏塔能否进行操作?不能操作能操作,但塔顶得不到合格产品r13.在正常操作下,影响精馏塔全效率的因素是:物系,设备与操作条件r仅与操作条件有关加热量增加效率一定增加加热量增加效率一定减少仅与物系和设备条件有关14.精馏塔的常压操作是怎样实现的?塔顶连通大气塔顶冷凝器入口连通大气塔顶成品受槽顶部连通大气r塔釜连通大气进料口连通大气15.全回流操作时,回流量的多少受哪些因素的影响?受塔釜加热量的影响r受塔顶冷剂量的影响16.为什么要控制塔釜液面高度?为了防止加热装置被烧坏r为了使精馏塔的操作稳定r为了使釜液在釜内有足够的停留时间r为了使塔釜与其相邻塔板间的足够的分离空间为了使釜压保持稳定17.塔内上升气速对精馏操作有什么影响?上升气速过大会引起漏液上升气速过大会引起液泛r上升气速过大会造成过量的液沫夹带r上升气速过大会造成过量的气泡夹带上升气速过大会使塔板效率下降r18.板压降的大小与什么因素有关?与上升蒸气速度有关r与塔釜加热量有关r2.传热实验1.下列属于传热基本形式有:间壁换热混合换热辐射r2."热能"总是:由热能高的物体传向热能低的物体由温度高的物体传向温度低的物体r由比热大的物体传向比热小的物体3.间壁换热时,壁温总是:接近温度高的流体接近温度低的流体接近传热系数大的流体r4.在本实验中的管壁温度Tw应接近蒸汽温度,还是空气温度?可能的原因是:接近空气温度,这是因为空气处于流动状态,即强制湍流状态,a(空气)↑。
计算机仿真技术实验报告实验三利用数值积分算法的仿真实验实验三 利用数值积分算法的仿真实验一. 实验目的1) 熟悉MATLAB 的工作环境;2) 掌握MATLAB 的 .M 文件编写规则,并在命令窗口调试和运行程序; 3) 掌握利用欧拉法、梯形法、二阶显式Adams 法及四阶龙格库塔法构建系统仿真模型的方法,并对仿真结果进行分析。
二. 实验内容系统电路如图 2.1所示。
电路元件参数:直流电压源V E 1=,电阻Ω=10R ,电感H L 01.0=,电容F C μ1=。
电路元件初始值:电感电流A i L 0)0(=,电容电压V u c 0)0(=。
系统输出量为电容电压)(t u c 。
连续系统输出响应)(t u c 的解析解为:))/sin (cos 1()(ωωωa t t e U t u at s c ⨯+⨯-=- (2-1)其中,LRa 2=,221⎪⎭⎫ ⎝⎛-=L R LC ω。
)(t u c 图2.1 RLC 串联电路三、要求1) 利用欧拉法、梯形法、二阶显式Adams 法及显式四阶Runge-Kutta 法构建系统仿真模型,并求出离散系统的输出量响应曲线;2) 对比分析利用欧拉法、梯形法、二阶显式Adams 法及显式四阶Runge-Kutta 法构建系统仿真模型的仿真精度与模型运行的稳定性问题; 3) 分别编写欧拉法、梯形法、二阶显式Adams 法及显式四阶Runge-Kutta 法的.m 函数文件,并存入磁盘中。
.m 函数文件要求输入参数为系统状态方程的系数矩阵、仿真时间及仿真步长。
编写.m 命令文件,在该命令文件中调用已经编写完成的上述.m 函数文件,完成仿真实验;4) subplot 和plot 函数将输出结果画在同一个窗口中,每个子图加上对应的标题。
四.实验原理(1)连续系统解析解连续系统输出响应)(t u c 的解析解为:))/sin (cos 1()(ωωωx t t e U t u at s c ⨯+⨯-=-其中,LRx 2=,221⎪⎭⎫ ⎝⎛-=L R LCω (2)原系统的传递函数根据所示电路图,我们利用电路原理建立系统的传递函数模型,根据系统的传递函数是在零初始条件下输出量的拉普拉斯变换与输入量的拉普拉斯变换之比,可得该系统的传递函数:LCLs R s LCs E s U s G C /1//1)()()(2++==(3)系统的仿真模型在连续系统的数字仿真算法中,较常用的有欧拉法、梯形法、二阶显式Adams 法及显式四阶Runge-Kutta 法等。
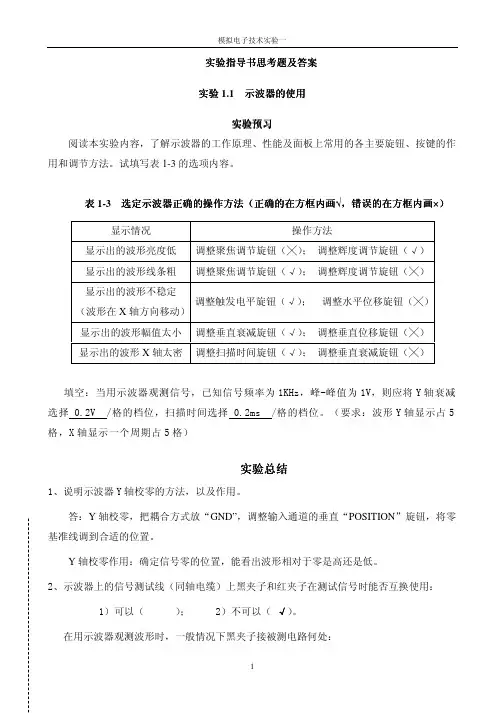
实验指导书思考题及答案实验1.1 示波器的使用实验预习阅读本实验内容,了解示波器的工作原理、性能及面板上常用的各主要旋钮、按键的作用和调节方法。
试填写表1-3的选项内容。
填空:当用示波器观测信号,已知信号频率为1KHz,峰-峰值为1V,则应将Y 轴衰减选择 0.2V /格的档位,扫描时间选择 0.2ms /格的档位。
(要求:波形Y 轴显示占5格,X 轴显示一个周期占5格)实验总结1、说明示波器Y 轴校零的方法,以及作用。
答:Y 轴校零,把耦合方式放“GND”,调整输入通道的垂直“POSITION ”旋钮,将零基准线调到合适的位置。
Y 轴校零作用:确定信号零的位置,能看出波形相对于零是高还是低。
2、示波器上的信号测试线(同轴电缆)上黑夹子和红夹子在测试信号时能否互换使用:1)可以( ); 2)不可以( √√)。
在用示波器观测波形时,一般情况下黑夹子接被测电路何处:表1-3 选定示波器正确的操作方法选定示波器正确的操作方法((正确的在方框内画√,错误的在方框内画×) 显示情况操作方法 显示出的波形亮度低调整聚焦调节旋钮(╳); 调整辉度调节旋钮(√) 显示出的波形线条粗调整聚焦调节旋钮(√); 调整辉度调节旋钮(╳) 显示出的波形不稳定(波形在X 轴方向移动)调整触发电平旋钮(√); 调整水平位移旋钮(╳) 显示出的波形幅值太小 调整垂直衰减旋钮(√); 调整垂直位移旋钮(╳)显示出的波形X 轴太密 调整扫描时间旋钮(√); 调整垂直衰减旋钮(╳)1)接被测信号“地”( √√ );2)悬空不接( );3)接电路任意地方( )。
((在正确的答案后画√√)3、用示波器测“CAL”的波形时,说明Y 轴输入耦合方式选“DC” 挡与“AC”挡观测时,波形有什么不同?为什么不同?答:波形样子相同,但垂直方向上有位移。
原因:1、示波器的“CAL”有1V 的直流分量。
2、选“DC”档:波形的交、直流分量都能显示。
化工仿真思考题答案问题一:为什么需要化工仿真?化工仿真在现代化工工程中起着至关重要的作用。
化工仿真能够通过计算机模拟化工过程,在实际操作之前预测出可能出现的问题,降低工程风险,并优化和改进流程设计。
以下是为什么需要化工仿真的几个主要原因:1.减少实验成本和时间:在实际操作之前,通过化工仿真可以有效减少实验成本和时间。
仿真可以用于开发和测试新产品、优化工艺参数、改进工艺流程等。
传统的实验可能需要大量的材料和设备,而且时间较长。
而通过仿真,可以通过计算机模拟来预测实验结果,并且可以迅速地调整和优化参数,大大减少实验的成本和时间。
2.降低工程风险:在实际操作之前,通过化工仿真可以预测出可能出现的问题,降低工程风险。
通过对化工过程进行细致的模拟和分析,可以评估不同参数和条件下可能出现的情况,并通过优化和改进工艺设计来防止潜在的问题。
这可以减少发生事故和故障的概率,提高工程操作的安全性和可靠性。
3.优化工艺设计:通过化工仿真,可以对工艺流程进行全面的优化和改进。
通过模拟和分析不同参数和条件下的工艺性能,可以找到最佳的工艺参数和操作条件,提高产品质量和生产效率。
此外,还可以通过仿真模拟不同的工艺配置和操作策略,比较不同方案的优劣,选择最佳方案。
4.调试和故障排除:在化工过程中,常常会出现各种故障和问题。
通过化工仿真,可以模拟和分析故障产生的原因,并提出解决方案。
仿真可以帮助工程师定位问题的根源,并提供修复和改进的策略。
问题二:化工仿真的常用方法有哪些?化工仿真涉及到多个方面,常用的方法包括:1.数值模拟方法:数值模拟是最常用的化工仿真方法之一。
通过将化工过程的方程建立成数学模型,并通过计算机数值计算方法求解模型的数值解,来模拟化工过程的运行和性能。
常用的数值模拟方法包括有限元方法、有限差分法和有限体积法等。
2.计算流体力学(CFD)方法: CFD 是一种专门用于模拟流体流动和传热传质的方法。
它可以模拟各种流体流动情况,包括单相流、多相流、湍流、传热传质等。
化⼯仿真实习思考题及答案完全版⼀、离⼼泵思考题1.离⼼泵操作不当会出现“⽓蚀”与“⽓缚”现象。
分析产⽣这两种现象的原因、现象、解决⽅法。
答:⽓蚀:当液体在与固体表⾯接触处的压⼒低于它的蒸汽压⼒时,将在固体表⾯附近形成⽓泡。
另外,溶解在液体中的⽓体也可能析出⽽形成⽓泡。
随后,当⽓泡流动到液体压⼒超过⽓泡压⼒的地⽅时,⽓泡变溃灭,在溃灭瞬时产⽣极⼤的冲击⼒和⾼温。
固体表⾯经受这种冲击⼒的多次反复作⽤,材料发⽣疲劳脱落,使表⾯出现⼩凹坑,进⽽发展成海绵状。
严重的其实可在表⾯形成⼤⽚的凹坑,深度可达20mm。
⽓蚀的机理是由于冲击应⼒造成的表⾯疲劳破坏,但液体的化学和电化学作⽤加速了⽓蚀的破坏过程。
减少⽓蚀的有效措施是防⽌⽓泡的产⽣。
⾸先应使在液体中运动的表⾯具有流线形,避免在局部地⽅出现涡流,因为涡流区压⼒低,容易产⽣⽓泡。
此外,应当减少液体中的含⽓量和液体流动中的扰动,也将限制⽓泡的形成。
选择适当的材料能够提⾼抗⽓蚀能⼒。
通常强度和韧性⾼的⾦属材料具有较好的抗⽓蚀性能,提⾼材料的抗腐蚀性也将减少⽓蚀破坏。
⽓缚:离⼼泵启动时,若泵内存有空⽓,由于空⽓密度很低,旋转后产⽣的离⼼⼒⼩,因⽽叶轮中⼼区所形成的低压不⾜以将储槽内的液体吸⼊泵内,虽启动离⼼泵也不能输送液体。
此种现象称为⽓缚,表⽰离⼼泵⽆⾃吸能⼒,所以必须在启动前向壳内灌满液体。
解决⽓缚⽅法:在启动前向壳内灌满液体。
做好壳体的密封⼯作,灌⽔的阀门和莲蓬头不能漏⽔密封性要好。
为了使泵内充满液体,通常在吸⼊管底部安装⼀带滤⽹的底阀,该底阀为⽌逆阀,滤⽹的作⽤是防⽌固体物质进⼊泵内损坏叶轮或妨碍泵的正常操作。
2.启动与停⽌离⼼泵时,泵的出⼝阀应处于什么状态?为什么?答:离⼼泵在排出管路阀门关闭状态下启动,因为离⼼泵是靠叶轮离⼼⼒形成真空的吸⼒把⽔提起,所以,离⼼泵启动时,必须先把闸阀关闭,灌⽔。
⽔位超过叶轮部位以上,排出离⼼泵中的空⽓,才可启动。
启动后,叶轮周围形成真空,把⽔向上吸,其闸阀可⾃动打开,把⽔提起。
思考题及答案思考题答案1、影响精馅塔操作的因素有哪些?影响精憎操作的因素有以下几种:(1)冋流比的影响;(2)进料状态的影响;(3)进料量大小的影响;(4)进料组成变化的影响;(5)进料温度变化的煤响;(6)塔顶冷剂量大小的影响;(7)塔顶采出量大小的煤响;(8)塔底采出量大小的影响。
2、进料状态有哪几种,对精馅操作有何影响?进料状态有五种:(1)冷进料。
(2)饱和液。
(3)气液混和物。
(4)饱和气。
(5)过热气。
对于固定时料的某个塔来说,进料状态的改变,将会影响产品质量和损失。
例如:某塔为饱和液进料,当改为冷进料时,料液入塔后在加料板上与提馄段上升的蒸气相遇,即被加热至饱和温度,与此同时,上升熬汽有一部分被冷凝下来,精憎段塔板数过多,提幅段板数不足,结果会造成釜液屮损失增加。
这时在操作上,应适当调整再沸器蒸汽,使塔的冋流量达到原来量。
3、迸料量的大小对精馅操作有何影响?有两种情况:(1)进料量波动范围不超过塔顶冷凝器和加热釜的负荷范围时,只要调节得当,对顶温和釜温不会有显著变化,而只影响塔内上升蒸汽速度的变化。
(2)进料量变动的范囤超过了塔顶冷凝器和加热的负荷范用时,不仅影响塔内上升蒸汽速度的变化,而且会改变塔顶、塔釜温度,致使塔板上的气液平衡组成改变,直接影响塔顶产品的质量和塔釜损失。
总Z,进料过大的彼动,将会破坏塔内正常的物料平衡和工艺条件,造成了系列的波动。
因此,应平衡进料,细心调节。
4、进了组成的变化对精馅操作有何影响?进料纟R成的变化肯接影响精镭操作,当进料屮重组分增加时,精锚段负荷增加,容易造成重组分带到塔顶,使塔顶产品不合格,若进料屮轻组分增加,提憾段负荷就会加重,容易造成釜液屮轻组份损失加大。
进料纽•成的变化,还会引起物料平衡和工艺条件的变化。
5、进料温度的变化对精馅操作有何影响?进料温度的变化对精馆操作影响是很大的。
进料温度低,会增加加热釜的热负荷,减少塔顶冷凝器的冷负荷。
反Z亦反。
EWB仿真实验指导时述有主编装备与材料学院实验一基尔霍夫电压定律一、实验目的1、测量串联电阻电路的等效电阻并比较测量值和计算值。
2、确定串联电阻电路中流过每个电阻的电流。
3、确定串联电阻电路中每个电阻两端的电压。
4、根据电路的电流和电压确定串联电阻电路的等效电阻。
5、验证基尔霍夫电压定律。
二、实验器材直流电压源 1个数字万用表 1个电压表 3个电流表 3个电阻 3个三、实验原理及实验电路两个或两个以上的元件首尾依次连在一起称为串联,串联电路中流过每一个元件的电流相等。
若串联的元件是电阻,则总电阻等于各个电阻值和。
因此,在图1—1所示电阻串联电路中R=R1+R2+R3。
图1—1电阻串联电路串联电路的等效电阻确定以后,由欧姆定律,用串联电阻两端的电压U除以等效电阻R,便可求出电流I,即 I=U/R 。
基尔霍夫电压定律指出,在电路中环绕任意闭合路径一周,所有电压降的代数和必须等于所有电压升的代数和。
这就是说,在图1—2所示电路中,串联电阻两端电压降之和必须等于串联电路所加的电源电压之和。
因此,由基尔霍夫电压定律有:U 1=Ubc+Ude+Ufo式中,Ubc=IR1,Ude=IR2,Ufo=IR3。
图1—2基尔霍夫电压定律实验电路四、实验步骤1、建立如图1—1所示的电阻串联实验电路。
2、用鼠标左键单击仿真电源开关,激活实验电路,用数字万用表测量串联电路的等效电阻R,记录测量值,并与计算值比较。
3、建立如图1—2所示的基尔霍夫电压定律实验电路。
4、用鼠标左键单击仿真电源开关,激活实验电路,记录电流Iab 、Icd、Ief及电压Ube 、Ude、Ufo。
5、利用等效电阻R,计算电源电压U1和电流I 。
6、用R1两端的电压计算流过电阻R1的电流IR1。
7、用R2两端的电压计算流过电阻R2的电流IR2。
8、用R3两端的电压计算流过电阻R3的电流IR3。
9、利用电路电流Iab 和电源电压U1计算串联电路的等效电阻R 。
仿真实习思考题-2014第一篇:仿真实习思考题-2014一、离心泵思考题1.2.3.4.5.6.离心泵操作不当会出现“气蚀”与“气缚”现象。
分析产生这两种现象的原因、现象、解决方法。
启动与停止离心泵时,泵的出口阀应处于什么状态?为什么? 离心泵出口压力过高或过低,应如何调节?离心泵入口压力过高或过低,应如何调节?离心泵为什么不用入口阀来调解流量?分析本工艺中有哪些简单调节系统和复杂调节系统?二、热交换器思考题1.2.3.4.5.热交换系统的目的是加热冷流体还是冷却热流体?冷态开车时是先送冷流体还是先送热流体?停车时又如何?为什么?热交换器开车前为什么必须进行高点排气?热交换器停车后为什么必须进行低点管程,壳程排液?热物料出口温度调节为什么采用分程控制?三、液位控制思考题1.本单元包括了常见的串级、分程、比值三种复杂调节系统,它们各有什么特点?与简单控制系统的差别是什么?2.找出本工艺中的比值调节系统,分析哪一个是主动量?为什么?3.找出本工艺中的串级调节系统,分析哪一个是主控?哪一个是副控?为什么要如此设计?四、精馏思考题1.在本单元中,如果塔顶温度、压力都超过标准,可以有几种方法将系统调节稳定?2.当系统在一较高负荷突然出现大的波动、不稳定,为什么要将系统降到一低负荷的稳态,再重新开到高负荷?3.根据本单元的实际,结合“化工原理”讲述的原理,说明回流比的作用。
4.本单元采用串级控制的目的?五、吸收系统思考题1.吸收的机理是什么?如何提高吸收率?2.气液比对吸收过程有何影响?本吸收系统如何控制气液比?3.本吸收系统设有哪些控制回路?各起何作用?六、固定床反应器思考题1.2.3.4.根据本单元实际情况,说明反应器冷却剂的自循环原理。
观察在EH-429冷却器的冷却水中断后会造成的结果。
结合本单元实际,理解“连锁”和“连锁复位”的概念。
催化反应中为什么有时会产生飞温?应如何避免?七、流化床反应器思考题1.流化床主要用在什么样的反应体系?2.为什么要控制流化床中流体的停留时间?3.什么是物料的返混?它与单纯的物料混合有何区别?4.开车及运行过程中,为什么一直要保持氮封?第二篇:仿真实习3.仿真实习仿真实习是在电厂实习后在电脑上仿真模拟电厂的各个系统,可以让我们更好地了解电厂设备运行中的状态,可以模拟电厂运行中的故障,帮助我们更好地了解电厂的设备的运行,巩固电厂学习的知识,为以后专业课的学习奠定更好的基础。
《计算机仿真技术》实验指导书实验一 状态空间模型的仿真一、实验目的通过实验,学习4阶龙格-库塔法的基本思路和计算公式,加深理解4阶龙格-库塔法的原理和稳定域。
加深理解仿真的稳定性,仿真步长对仿真精度的影响。
二、实验内容1、线性定常系统[]1112223332010002001010060000600x x x x x u y x x x x -⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=-+=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦&&&;)(1000)0()0()0(321t u x x x =⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡2、非线性系统()()()()()()()()xt rx t ax t y t yt sx t bx t y t =-⎧⎨=-+⎩&& 其中:r=0.001, a=2⨯10-6, s=0.01, b=1⨯10-6, x(0)=12000, y(0)=600。
三、实验原理运用SIMULINK 仿真工具进行实验。
四、实验设备和仪器微型计算机、MATLAB 软件。
Sources(信号源),Sink(显示输出),Continuous(线性连续系统),Discrete(线性离散系统),Function & Table (函数与表格),Math(数学运算), Discontinuities (非线性),Demo (演示)五、实验方法运行MA TLAB ,在MA TLAB 窗口中按SimuLink 按钮,启动SimuLink 库浏览器,在浏览器窗口上选create a new modem 命令,得到一个空模型,从Library: SimuLink 窗口中找到需要的模块,将这些模块拖到空模型窗口中。
将空模型窗口中的排好,并按要求连接。
在保存好的模型窗口中,选Simulation\Paramters 命令设置各模块的参数和仿真参数。
实验名称:探究不同光照条件下植物生长的影响实验目的:通过本实验,探究不同光照条件下植物的生长状况,分析光照对植物生长的影响。
实验时间:2023年4月10日实验地点:植物实验室实验材料:1. 种子(水稻种子、小麦种子、玉米种子各50粒)2. 容器(直径15cm的培养皿5个)3. 土壤(富含有机质的培养土)4. 光照设备(LED灯、遮光布)5. 测量工具(尺子、天平)6. 记录本实验方法:1. 将五种种子分别放入培养皿中,每个培养皿10粒,确保土壤湿润。
2. 将培养皿放置在植物实验室的培养架上,确保培养架上的光照均匀。
3. 设置五个实验组,分别采用以下光照条件:A组:自然光照B组:LED灯全光照C组:LED灯半光照D组:LED灯遮光E组:无光照4. 每隔一天记录各组植物的生长状况,包括植株高度、叶片数、根系长度等。
5. 在实验结束后,对各组植物进行称重,记录生物量。
实验结果:1. 自然光照条件下,植物生长良好,植株高度、叶片数、根系长度均达到最大值。
2. LED灯全光照条件下,植物生长速度较快,植株高度、叶片数、根系长度均有所增加。
3. LED灯半光照条件下,植物生长速度适中,植株高度、叶片数、根系长度均有所增长,但不如全光照条件下显著。
4. LED灯遮光条件下,植物生长缓慢,植株高度、叶片数、根系长度均有所减少。
5. 无光照条件下,植物无法生长,植株高度、叶片数、根系长度均为0。
实验分析:本实验结果表明,光照对植物生长具有重要影响。
自然光照条件下,植物生长最为旺盛,其次是LED灯全光照条件下。
LED灯半光照条件下,植物生长速度适中,而遮光和无光照条件下,植物生长受到抑制。
结论:1. 光照是植物生长的重要因素,充足的光照有利于植物生长。
2. 在实际生产中,应根据植物的生长需求,合理调整光照条件,以提高产量和品质。
3. 本实验采用LED灯作为光源,具有节能、环保等优点,可作为植物生长研究的理想光源。
实验建议:1. 在今后的实验中,可以进一步探究不同光照强度对植物生长的影响。
实验一 连续系统的数字仿真一、实验目的1. 熟悉Matlab 中m 文件的编写; 2. 掌握龙格-库塔法的基本原理。
二、实验设备计算机、MATLAB 软件 三、实验内容假设单变量系统如图所示。
试根据四阶龙格-库塔法,求系统输出y 的动态响应。
1.首先把原系统转化为状态空间表达式:⎪⎩⎪⎨⎧=+=•CXy bu AX X ,根据四阶龙格-库塔公式,可得到: ⎪⎩⎪⎨⎧=++++=+++1143211)22(6k k k k CX y K K K K h X X (1) 其中: ⎪⎪⎪⎩⎪⎪⎪⎨⎧+++=+++=+++=+=)()()2()2()2()2()(3423121h t bu hK X A K ht bu K h X A K h t bu K h X A K t bu AX K k k k k k k k k (2)根据(1)、(2)式编写仿真程序。
2.在Simulink 环境下重新对上述系统进行仿真,并和1中结果进行比较。
四、实验结果及分析要求给出系统输出响应曲线,并分析计算步长对龙格-库塔法的影响。
计算步长对龙格-库塔法的影响:单从每一步看,步长越小,截断误差就越小,但随着步长的缩小,在一定求解范围内所要完成的步数就增加,不但引起计算量的增大,而且可能导致舍入误差严重积累,因此同积分的数值计算一样,微分方程的解法也有选择步长的问题。
源程序:r=5;numo=[1];deno=[1 4 8 5]; numh=1;denh=1;[num,den]=feedback(numo,deno,numh,denh); [A,b,C,d]=tf2ss(num,den);Tf=input('仿真时间 Tf= ');h=input('计算步长 h='); x=[zeros(length(A),1)];y=0;t=0;for i=1:Tf/h; K1=A*x+b*r;K2=A*(x+h*K1/2)+b*r; K3=A*(x+h*K2/2)+b*r; K4=A*(x+h*K3)+b*r;x=x+h*(K1+2*K2+2*K3+K4)/6; y=[y;C*x];t=[t;t(i)+h]; end plot(t,y)Tf=5 h=0.02五、思考题1. 试说明四阶龙格-库塔法与计算步长关系,它与欧拉法有何区别。
计算步长对龙格-库塔法的影响:单从每一步看,步长越小,截断误差就越小,但随着步长的缩小,在一定求解范围内所要完成的步数就增加,不但引起计算量的增大,而且可能导致舍入误差严重积累,因此同积分的数值计算一样,微分方程的解法也有选择步长的问题。
区别:四阶龙格库塔法与欧拉法都是基于在初值附近展开成泰勒级数的原理,所不同的是取泰勒级数的项数,欧拉公式仅取到h 项,四阶龙格库塔法取到h4项。
实验二 面向结构图的仿真一、实验目的1. 掌握连接矩阵及系统状态方程的确定方法; 2. 掌握面向结构图的仿真方法。
二、实验设备计算机、MATLAB 软件 三、实验内容假设某系统由三个典型环节组成,如下图所示,求输出量y 的动态响应。
仿真基本步骤:1. 给定输入信号,确定典型环节及环节参数; 2. 确定连接矩阵;3. 输入仿真时间和计算步长;4. 求H,H -1和Q 阵,确定A 、B 阵; 5. 根据龙格-库塔法求状态方程的解; 6. 根据1~5编写仿真程序。
四、实验结果及分析 源程序:r=10;P=[0 1 1 0;2 1 2 0;10 1 10 0]; W=[0 0 -1;1 0 0; 0 1 0]; W0=[1;0;0]; Wc=[0 0 1];Tf=input('仿真时间 Tf =');h=input( '计算步长 h=');A1=diag(P(:,1));B1=diag(P(:,2));C1=diag(P(:,3));D1=diag(P(:,4)); H=B1-D1*W;Q=C1*W-A1; A=inv(H)*Q;B=inv(H)*C1*W0;x=[zeros(length(A),1)];y=[zeros(length(Wc(:,1)),1)]; t=0; for i=1:Tf/h; K1=A*x+B*r;K2=A*(x+h*K1/2)+B*r; K3=A*(x+h*K2/2)+B*r; K4=A*(x+h*K3)+B*r;x=x+h*(K1+2*K2+2*K3+K4)/6; y=[y;Wc*x];t=[t;t(i)+h]; endplot(t,y) 仿真时间Tf=10 计算步长h=0.05图一 仿真曲线五、思考题1. 典型环节的确定必须满足什么条件? 答: G(S)=bsa ds++=c U(S)X(S)式中u 为典型环节的输入,x 为典型环节的输出。
1.为了保证H 的逆1-H 存在,应严格按照i b ≠0的原则确定每个典型环节,既避免以纯比例、纯微分环节作为典型环节。
2.在输入向量不全为阶跃函数的情况下,只要在确定典型环节时,注意使含有微分项系数即d≠0)的环节不直接与参考输入连接。
(i实验三连续系统的快速仿真一、实验目的1.熟悉增广矩阵的构建方法;2.掌握连续系统的快速仿真基本原理。
二、实验设备计算机、MATLAB软件三、实验内容假设某系统结构图如下,要求采用快速仿真方法求系统输出响应。
Array仿真基本步骤:1.给定输入信号,确定典型环节及环节参数;2.确定连接矩阵;3.输入仿真时间和计算步长;4.求H,H-1和Q阵,确定A、B阵;5.构建增广矩阵;6.采用增广矩阵法求齐次方程的解和系统输出响应。
根据1~6编写仿真程序。
四、实验结果和分析源程序:r=10;[num,den]=series(1,[1,0],2,[1,2]);[num,den]=series(num,den,10,[1,10]);[num,den]=cloop(num,den);[A1,B1,C1,D1]=tf2ss(num,den);A=[A1,B1;0,0,0,0];C=[C1,0];Tf=10;h=0.05;k1=eye(size(A));k2=A*h; k3=k2*k2/2; k4=k3*k2/3;k=k1+k2+k3+k4;x=[zeros(size(A1,1),1);10]; y=0; t=0;for i=1:Tf/h x=k*x; y=[y,C*x]; t=[t,i*h]; end plot(t,y) 五、思考题1.增广矩阵法和四阶龙格-库塔法有何区别? 答: ...t A !31t A 21At I e3322A ++++=!t如果取tA e 的泰勒级数前五项,则增广矩阵的计算与四阶龙格库塔法相同。
四阶龙格库塔法具有很高的精度,但运行速度很慢,而增广矩阵法既满足了精度又满足了速度。
实验四 离散相似法仿真一、实验目的1. 掌握离散化的基本原理;2. 掌握非线性系统的离散化仿真方法。
二、实验设备计算机、MATLAB 软件 三、实验内容已知非线性系统结构图如下,求系统输出响应。
1. 给定参考输入,输入仿真时间,采样周期(T=0.1s ); 2. 将被控对象离散化;3.给定参数初始值;4.计算误差和非线性环节输出;5.计算系统输出;6.参数值更新;7.若仿真时间到,则结束,否则转1。
编写仿真程序,求解系统输出响应。
四、实验结果及分析源程序:%backlash.mfunction [x,u1]=backlash(u1,u,x1,s)if (u>u1)if ((u-s)>=x1) x=u-s;else x=x1;end else if (u<u1)if ((u+s)<=x1) x=u+s;else x=x1;endelse x=x1;endendu1=u;主程序:r=10;[num,den]=series([1 0.5],[1 0.1],[1],[1 0]); [num,den]=series(num,den,2,[1,2]); [num,den]=series(num,den,10,[1 10]);[A,B,C,D]=tf2ss(num,den);Tf=10;T=0.025;[G,H,C,D]=c2dm(A,B,C,D,T,'zoh');x=zeros(size(G,1),1);y=0;t=0;s=1;e1=0;u1=0;for i=1:Tf/Te=r-y(end);u=backlash(e1,e,u1,s);x=G*x+H*u;y=[y,C*x+D*u];t=[t,i*T];u1=u;e1=e;end;plot(t,y)五、思考题1. 试比较零阶保持器与双线性变换法区别。
答:零阶保持器与双线性变换都能够实现将连续系统的离散化,只是所使用的方法不同,零阶保持器是在系统中加入了s e Ts --1实现离散化,而双线性变换是直接将112+-=z z h s 代入传递函数实现离散化。
实验五 采样控制系统的数字仿真一、实验目的3. 掌握采样控制系统基本原理; 4. 掌握常用的离散化方法;5. 掌握采样控制系统的仿真方法。
二、实验设备计算机、MATLAB 软件 三、实验内容已知采样系统结构如下图所示,求系统的输出响应。
将系统中连续部分采用零阶保持器离散化,系统采用离散化方法进行仿真(同步采样),其具体步骤如下:1、 给定参考输入,输入仿真时间,采样周期(T=0.1s ),PID 控制器参数;2、将被控对象按零阶保持器方法离散化;3、给定参数初始值;4、计算误差和控制器输出;5、计算系统输出;6、参数值更新7、若仿真时间到,则结束,否则转1。
编写仿真程序,并调整控制器参数,使得系统输出响应较为合理。
四、实验结果及分析 源程序:r=1; Tf=20; Tm=1; T=0.01; kp=0.4;ki=0; kd=0;[A,B,C,D]=tf2ss(1,[1 1 0]); [G,H,C,D]=c2dm(A,B,C,D,T,'zoh'); u1=0; e2=0; e1=0; x=zeros(2,1); y=0; t=0; for i=1:Tf/T e=r-y(end);u2=u1+kp*(e-e1)+ki*e+kd*(e-2e1+e2); x=G*x+H*u2; y=[y,C*x+D*u2]; t=[t,i*T];e2=e1;e1=e;u1=u2; end plot(t,y);五、思考题2. 同步采样与异步采样在程序实现上有何区别? 答:同步采样:T=h ,异步采样T=N*h同步采样时,在程序中只要一个for 循环即可实现,而异步采样需要两个for 循环实现。
实验六 串联超前校正一、实验目的1. 掌握超前校正装置的基本特性; 2. 熟悉串联超前校正方法。