三角高中程测量的计算公式
- 格式:doc
- 大小:91.50 KB
- 文档页数:4
§ 5.9三角高程测量三角高程测量的基本思想是根据由测站向照准点所观测的垂直角(或天顶距)和它们之间的水平距离,计算测站点与照准点之间的高差。
这种方法简便灵活,受地形条件的限制较少,故适用于测定三角点的高程。
三角点的高程主要是作为各种比例尺测图的高程控制的一部分。
一般都是在一定密度的水准网控制下,用三角高程测量的方法测定三角点的高程。
5.9.1 三角高程测量的基本公式1.基本公式关于三角高程测量的基本原理和计算高差的基本公式,在测量学中已有过讨论,但公式的推导是以水平面作为依据的。
在控制测量中,由于距离较长,所以必须以椭球面为依据来推导三角高程测量的基本公式。
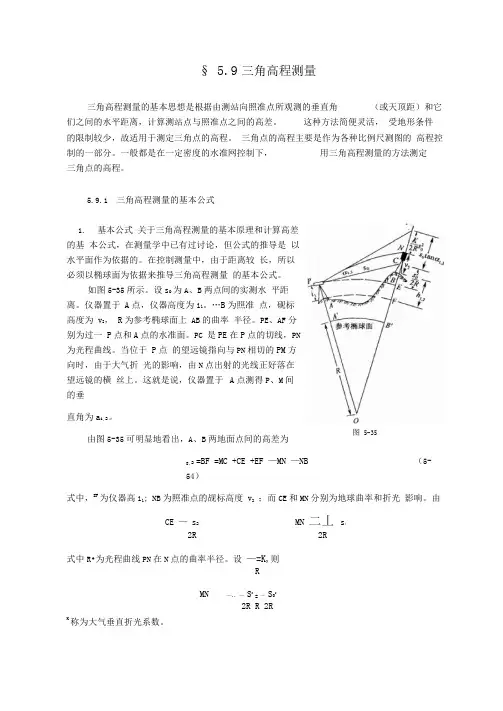
如图5-35所示。
设s o为A、B两点间的实测水平距离。
仪器置于 A点,仪器高度为i1。
…B为照准点,砚标高度为v2, R为参考椭球面上AB的曲率半径。
PE、AF分别为过一 P点和A点的水准面。
PC 是PE在P点的切线,PN为光程曲线。
当位于 P点的望远镜指向与PN相切的PM方向时,由于大气折光的影响,由N点出射的光线正好落在望远镜的横丝上。
这就是说,仪器置于A点测得P、M间的垂直角为a i,2。
图5-35 由图5-35可明显地看出,A、B两地面点间的高差为g,2 =BF =MC +CE +EF —MN —NB (5-54)式中,EF为仪器高i1; NB为照准点的觇标高度v2;而CE和MN分别为地球曲率和折光影响。
由CE — s2 MN 二丄s;2R 2R式中R•为光程曲线PN在N点的曲率半径。
设—=K,则RMN —.. —S2 = —S022R R 2RK称为大气垂直折光系数。
由于A 、B 两点之间的水平距离 S o 与曲率半径R 之比值很小(当S o =10km 时,s 0所 对的圆心角仅 5’多一点),故可认为 PC 近似垂直于 0M ,即认为PCMs^O :这样 .PCM 可视为直角三角形。
则(5-54 )式中的MC 为MC =S o tan 0(1,2将各项代入(5-54 )式,贝U A 、B 两地面点的高差为(5-56 )这就是表达实测距离 S 0与参考椭球面上的距离 S 之间的关系式。
图根三角高程测量
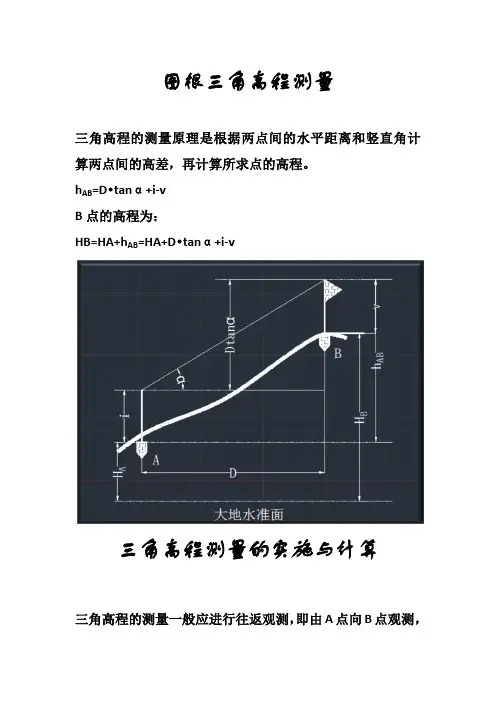
三角高程的测量原理是根据两点间的水平距离和竖直角计算两点间的高差,再计算所求点的高程。
h AB=D•tanα+i-v
B点的高程为:
HB=HA+h AB=HA+D•tanα+i-v
三角高程测量的实施与计算
三角高程的测量一般应进行往返观测,即由A点向B点观测,
再由B点向A点观测,这样的观测称为对向观测。
对向观测可以消除地球曲率和大气折光的影响
观测时,安置经纬仪于测站上,首先量取仪器高i和标志高V,读书至0.4CM,量取两次结果之差不超过1CM,取其平均值至1CM,然后用经纬仪观测竖直角,完成了往测后,再进行反测。
计算时,先计算两点之间的往返高差,符合要求取其平均值,作为两点间的高差。
当用三角高程测量方法测定平面控制点的高程时,要求组成闭合或符合三角高程路线,在闭合差符合要求时,按闭合和符合路线计算各控制点的高程。
三角高程测距法计算公式在地理测量和导航领域,测距是一项非常重要的工作。
而三角高程测距法是一种常用的测距方法之一。
本文将介绍三角高程测距法的计算公式及其应用。
三角高程测距法是利用三角形的相似性原理,通过测量两个点之间的水平距离和垂直高程差来计算两点之间的实际距离。
这种方法通常用于测量山区或者其他地形复杂的地区,因为在这些地方使用其他测距方法可能会受到一些限制。
三角高程测距法的计算公式如下:d = √(ΔH^2 + ΔL^2)。
其中,d表示两点之间的实际距离,ΔH表示两点之间的垂直高程差,ΔL表示两点之间的水平距离。
在实际应用中,首先需要测量两个点之间的水平距离,通常可以使用测距仪或者全站仪来进行测量。
然后需要测量两个点之间的垂直高程差,这可以通过水准仪或者其他高程测量工具来实现。
最后,将这两个数据代入上述的计算公式中,就可以得到两点之间的实际距离。
三角高程测距法的应用非常广泛。
比如在地图制作中,为了准确绘制地图上的山脉、河流等地理要素,需要使用三角高程测距法来获取这些地理要素之间的实际距离。
另外,在军事领域和野外探险中,也常常需要使用三角高程测距法来获取地形的实际距离,以便进行作战或者导航。
除了上述的基本公式之外,三角高程测距法还有一些变种和衍生公式。
比如在实际测量中,可能会遇到一些地形复杂的地区,这时候就需要考虑地形因素对测距结果的影响。
在这种情况下,可以使用斜距修正公式来修正实际距离,以提高测距的准确性。
总之,三角高程测距法是一种简单而有效的测距方法,它通过测量水平距离和垂直高程差来计算实际距离,广泛应用于地理测量、地图制作、军事作战和野外探险等领域。
通过掌握三角高程测距法的计算公式及其应用,可以更好地进行地理测量和导航工作,提高测距的准确性和可靠性。
第1篇1. 水平距离计算公式:L = √(Δx² + Δy²)其中,L为两点间的水平距离,Δx为两点在X轴上的坐标差,Δy为两点在Y轴上的坐标差。
2. 高程计算公式:H = H1 + h其中,H为某点的高程,H1为基准点的高程,h为某点相对于基准点的高程差。
3. 角度测量公式:α = arctan(Δy/Δx)其中,α为两点间的水平夹角,Δy为两点在Y轴上的坐标差,Δx为两点在X 轴上的坐标差。
4. 档距计算公式:D = √(L² + h²)其中,D为档距,L为水平距离,h为高差。
5. 线路中心桩位置计算公式:X = X1 + (L/2) cos(α)Y = Y1 + (L/2) sin(α)其中,X、Y为线路中心桩的坐标,X1、Y1为起点坐标,L为水平距离,α为线路与X轴的夹角。
6. 地面点的高程测设公式:bHAa - HB = H其中,b为前视尺读数,a为后视尺读数,HA为已知高程,HB为设计高程。
7. 线路弧垂计算公式:f = (L/2) tan(θ/2)其中,f为弧垂,L为档距,θ为导线悬挂点高差角。
8. 线路水平档距计算公式:D = (L/2) (1 + sin(θ))其中,D为水平档距,L为档距,θ为导线悬挂点高差角。
9. 线路垂直档距计算公式:D = (L/2) (1 + cos(θ))其中,D为垂直档距,L为档距,θ为导线悬挂点高差角。
10. 代表档距计算公式:Lo = (Q1 + Q2 + ... + Qn) / (n - 1)其中,Lo为代表档距,Q1、Q2、...、Qn为各档档距。
这些工程施工测量公式在实际应用中需要根据具体情况选择合适的公式,并注意公式的适用范围和精度要求。
在施工测量过程中,严格遵守测量规范和操作规程,确保测量数据的准确性和可靠性,对工程质量有着重要的影响。
第2篇一、水利水电工程施工测量公式1. 平面控制测量公式(1)角度测量公式:θ = α - β,其中θ为观测角,α为后视角,β为前视角。
利用matlab实现三角高程测量计算公式三角高程测量是一种常用的地形测量方法,其原理是根据三角形的内角和外角关系来计算高程。
这种测量方法既简单又精确,可以在不同的地形中使用,例如山地、平原、沙漠等地形。
三角高程测量的公式非常简单,通过利用三角形内角和外角的关系,可以推算出不同点之间的高程数据。
设在三角形ABC中,高为h,底角为A,那么有以下公式:h = AB * sin(C)/sin(180-A-C)其中h表示高度,AB表示底边长,C表示对应的底角。
由于正弦函数的应用,通过测量三角形的底角和边长,即可计算出高度。
在matlab中,可以使用以下代码实现三角高程测量:AB = input('输入底边长度:');A = input('输入底角度数:');C = input('输入对应底角度数:');h = AB * sin(C)/sin(180-A-C);fprintf('高度为: %f\n',h);通过输入底边长度、底角度数和对应底角度数,就可以计算出高度数据。
在实际测量中,可以通过测量三角形底边长和底角,计算得到不同点的高程数据,从而描绘出三维地形图。
在使用这种方法进行地形测量时,需要注意以下几点:1. 应该尽量选择测量角度大于60度的三角形,这样可以提高计算的精度。
2. 应该注意测量精度,尽量避免误差。
3. 应该注意测量的安全性,避免测量过程中发生意外。
三角高程测量是一种常用的地形测量方法,其公式简单易用,可以在不同地形环境下进行测量,具有很高的实用价值。
在实际测量中,需要注意测量精度、安全性和测量角度的选择,以提高计算精度并避免测量风险。
使用matlab实现三角高程测量,可以极大地提高测量效率和精度,有着广泛的应用前景。
三角高程测量的概念、计算公式及提高精度的措施进行论述三角高程测量是一种测量地面高程的方法,它通过三角形的内角、边长和高度关系,计算出观测点的高程。
三角高程测量需要测量观测点与控制点之间的距离和高差,同时还需要测量观测点与控制点之间的水平角和垂直角。
测量公式包括正弦定理、余弦定理和正切定理等,其中正弦定理和余弦定理常用于计算距离和高差,而正切定理则用于计算水平角和垂直角。
在实际测量中,还需要考虑误差来源和如何提高测量精度。
为了减小误差,可以采用多次测量取平均值的方法,使用高精度的测量仪器和设备,以及在测量前进行现场勘察和规划。
同时,还可以对数据进行处理和分析,使用数据拟合和回归分析等方法,提高测量精度和可靠性。
总之,三角高程测量是一种非常重要的测量方法,它可以应用于地形测量、工程测量等领域,具有广泛的应用前景。
在进行测量时,需要掌握基本的概念和测量公式,同时还需要注意误差来源和提高测量精度的措施。
- 1 -。
三角高程测量原理
三角高程测量原理是通过测量不同位置的角度来计算地面上的高程差。
这个原理是基于三角形的性质,根据三角形的内角和外角之间的关系,可以推导出高程差的计算公式。
测量过程中,需要选取两个测量点A和B,并在这两个点之间选择一个基准点O。
然后,用仰角仪或望远镜等测量工具,分别测量AOB、BOA和AOB三个角的大小。
测量出这三个角度后,可以根据三角形的内角和外角之间的关系来计算高程差。
根据三角形的内角和外角之间的关系,可以得到如下公式:
AOB + BOA + AOB = 180°
将测量的角度代入公式中,可以得到:
AOB + BOA + AOB = 180°
2AOB + BOA = 180°
AOB = (180° - BOA) / 2
根据这个公式,可以计算出AOB的角度,然后利用三角函数计算出高程差。
具体的计算方法可以根据具体的测量设备和测量要求进行选择和调整。
总之,三角高程测量原理是一种通过测量角度来计算地面高程
差的方法。
它利用了三角形的性质,通过测量不同位置的角度来计算地面高程差,可以广泛应用于地质勘探、土地测量和工程测量等领域。
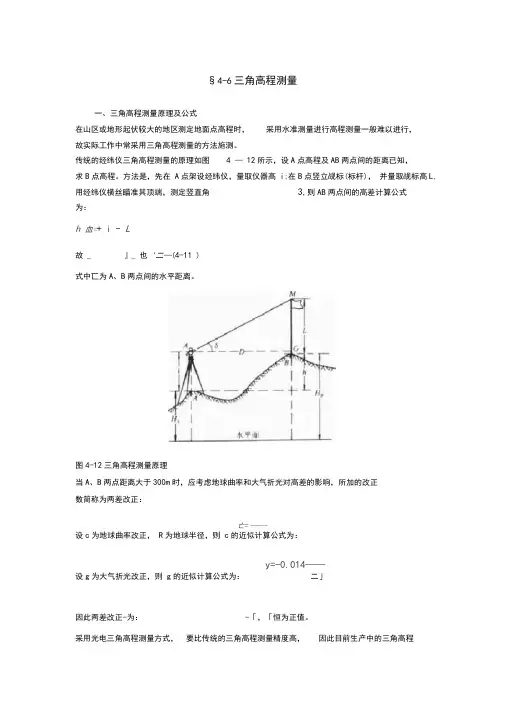
§4-6三角高程测量一、三角高程测量原理及公式在山区或地形起伏较大的地区测定地面点高程时,采用水准测量进行高程测量一般难以进行,故实际工作中常采用三角高程测量的方法施测。
传统的经纬仪三角高程测量的原理如图 4 —12所示,设A点高程及AB两点间的距离已知,求B点高程。
方法是,先在A点架设经纬仪,量取仪器高i;在B点竖立觇标(标杆),并量取觇标高L,用经纬仪横丝瞄准其顶端,测定竖直角3,则AB两点间的高差计算公式为:h 血=+ i - L故 _ 』_ 也'二—(4-11 )式中匸为A、B两点间的水平距离。
图4-12三角高程测量原理当A、B两点距离大于300m时,应考虑地球曲率和大气折光对高差的影响,所加的改正数简称为两差改正:亡= -----设c为地球曲率改正,R为地球半径,则c的近似计算公式为:y=-0.014——设g为大气折光改正,则g的近似计算公式为:二」因此两差改正-为:-「,「恒为正值。
采用光电三角高程测量方式,要比传统的三角高程测量精度高,因此目前生产中的三角高程采用光电测距仪测定两点的斜距S,贝y B点的高程计算公式为:测量多采用光电法。
i 丄"’-■' ()4-12为了消除一些外界误差对三角高程测量的影响,通常在两点间进行对向观测,即测定hAB和hBA,最后取其平均值,由于hAB和hBA反号,因此-可以抵销。
实际工作中,光电三角高程测量视距长度不应超过1km,垂直角不得超过15°。
理论分析和实验结果都已证实,在地面坡度不超过8度,距离在1.5km 以内,采取一定的措施,电磁波测距三角高程可以替代三、四等水准测量。
当已知地面两点间的水平距离或采用光电三角高程测量方法时,垂直角的观测精度是影响三角高程测量的精度主要因素。
二、光电三角高程测量方法光电三角高程测量需要依据规范要求进行,如《公路勘测规范》中光电三角高程测量具体要求见表4-6。
表4-6光电三角高程测量技术要求注:表4-6中匸为光电测距边长度。


全站仪三角高程测量方法第一步:仪器准备首先,根据实际情况选择适当的测高点,并在该点上插起遥控杆,确保全站仪可以准确锁定目标。
然后,根据需要设置全站仪的高程仪的零位,并将全站仪调整到水平状态。
第二步:目标设置将全站仪对准目标点,并使用遥控器调整全站仪的水平和垂直方向,使仪器准确锁定目标点。
第三步:观测测角使用全站仪的测角功能,测量目标点与参考点之间的水平角和垂直角。
根据需要进行多组测量以增加测量精度。
第四步:计算水平距离根据测得的水平角和垂直角,利用三角函数计算目标点与参考点之间的水平距离。
一般来说,可以利用如下公式进行计算:水平距离 = 斜距× sin(垂直角)第五步:计算高差根据测得的水平距离和垂直角,可以计算目标点相对于参考点的高差。
可以利用如下公式进行计算:高差 = 斜距× cos(垂直角) - 参考点高程第六步:重复观测为了提高测量精度,可以对同一目标点进行多次观测,并求取平均值来减小误差。
在测量过程中,应注意避免强烈的日照、大风、震动等对测量结果的影响。
第七步:校正和纠正根据需要,可以进行校正和纠正以减小测量误差。
比如,可以进行仪器误差校正,或者通过测量参考点和校正点之间的高差,对测得的高差进行纠正。
第八步:记录和分析将测量结果记录下来,并进行分析和处理。
可以使用计算机软件进行数据处理,绘制等高线图或者建立数字地形模型。
在进行全站仪三角高程测量时,需要注意以下事项:1.选择合适的目标点和参考点,并确保在观测期间目标点不发生变化。
2.在测量过程中,应当避免使用过大的测量距离,以减小测量误差。
3.在测量目标点与参考点之间的垂直角时,应注意避免仪器的抖动和偏斜,以减小测量误差。
4.在观测角度时,应尽量使用对称角,以减小反射误差。
5.使用全站仪进行测量时,应注意避免强烈的日照,避免造成测量误差。
6.在测量过程中,应定期检查全站仪的水平状态,并进行调整,以保证测量的准确性。
7.在记录测量结果时,应准确记录角度、距离和高差等数据,并进行单位的统一,以避免数据误差。
三角高程测量高差中误差计算公式1. 什么是三角高程测量三角高程测量是一种常用的测量方法,可以用于测量地面上两点间的高度差。
它的原理是通过三角形的性质来计算出两点间的高差,因此被称为三角高程测量。
2. 中误差的概念在三角高程测量过程中,由于测量数据的误差,会导致测量结果的精度受到影响。
为了评估测量结果的精度,需要计算中误差。
中误差是指样本中单个测量值与样本平均值之差的平均值。
通常用标准差来表示中误差,它是各单次测量值离样本平均值的差的平方和的平均数的算术平方根。
3. 三角高程测量中误差的计算公式在三角高程测量中,中误差可以通过测量数据的方差和协方差计算得出。
常用的计算公式如下:1) 方差公式:$$\sigma^2 = \frac{\sum_{i=1}^n (x_i - \bar{x})^2}{n-1}$$其中,$x_i$表示第$i$次测量的结果,$\bar{x}$是所有结果的平均值,$n$是测量次数,$\sigma^2$表示样本方差。
2) 协方差公式:$$\text{cov}(x,y) = \frac{\sum_{i=1}^n (x_i -\bar{x})(y_i - \bar{y})}{n-1}$$其中,$x_i$和$y_i$分别表示第$i$次测量的两个测量值,$\bar{x}$和$\bar{y}$分别表示$x$和$y$的平均值,$\text{cov}(x,y)$表示$x$和$y$的协方差。
3) 中误差公式:$$\sigma_{\text{mid}} = \sqrt{\frac{\sigma^2_a +\sigma^2_b - 2\text{cov}(a,b)}{2}}$$其中,$\sigma_{\text{mid}}$表示中误差,$\sigma^2_a$和$\sigma^2_b$分别表示两个测量角度的方差,$\text{cov}(a,b)$表示两个测量角度的协方差。
4. 如何减小中误差为了减小三角高程测量中误差,可以采取以下措施:1) 提高仪器的精度,使用高精度的仪器进行测量。
三角高程计算公式及其含义在地理测量和地理信息系统中,三角高程计算是一种常用的方法,用于确定地表上各点的高程。
三角高程计算公式是一种基于三角测量原理的数学公式,通过测量三角形的边长和角度,来计算出三角形的高程。
这种方法可以用来确定地表上任意点的高程,对于地形测量和地图制图非常有用。
三角高程计算公式的一般形式如下:h = (a sin(B)) / sin(A)。
其中,h表示目标点的高程,a表示已知边长,B表示已知角度,A表示未知角度。
这个公式基于正弦定理,通过已知的边长和角度来计算出目标点的高程。
这种方法可以用来测量地表上任意点的高程,无论是平原还是山地,都可以通过三角高程计算公式来确定其高程。
三角高程计算公式的含义非常重要,它可以帮助测量员确定地表上各点的高程,从而绘制出精确的地形图。
地形图是地理信息系统中非常重要的一部分,它可以用来确定地表的起伏和坡度,对于农业、建筑和城市规划等领域都非常有用。
通过三角高程计算公式,可以确定地表上各点的高程,从而绘制出准确的地形图,为各种应用提供重要的参考数据。
三角高程计算公式的应用非常广泛,不仅可以用于地形测量和地图制图,还可以用于工程测量和建筑规划。
在工程测量中,三角高程计算可以帮助工程师确定工程场地的高程,从而进行设计和施工。
在建筑规划中,三角高程计算可以帮助规划师确定建筑场地的高程,从而进行布局和设计。
通过三角高程计算公式,可以为各种工程和建筑提供准确的高程数据,为实际施工和规划提供重要的参考。
总之,三角高程计算公式是地理测量和地理信息系统中非常重要的一种方法,它可以帮助确定地表上各点的高程,为地形测量、地图制图、工程测量和建筑规划提供重要的参考数据。
通过三角高程计算公式,可以为各种应用提供准确的高程数据,为实际工作提供重要的支持。
因此,掌握和应用三角高程计算公式是地理测量和地理信息系统工作者的基本技能,也是各种应用领域的重要工具。
三角高程测量-CAL-FENGHAI.-(YICAI)-Company One11§ 三角高程测量三角高程测量的基本思想是根据由测站向照准点所观测的垂直角(或天顶距)和它们之间的水平距离,计算测站点与照准点之间的高差。
这种方法简便灵活,受地形条件的限制较少,故适用于测定三角点的高程。
三角点的高程主要是作为各种比例尺测图的高程控制的一部分。
一般都是在一定密度的水准网控制下,用三角高程测量的方法测定三角点的高程。
三角高程测量的基本公式1.基本公式关于三角高程测量的基本原理和计算高差的基本公式,在测量学中已有过讨论,但公式的推导是以水平面作为依据的。
在控制测量中,由于距离较长,所以必须以椭球面为依据来推导三角高程测量的基本公式。
如图5-35所示。
设0s 为B A 、两点间的实测水平距离。
仪器置于A 点,仪器高度为1i 。
B 为照准点,砚标高度为2v ,R 为参考椭球面上B A ''的曲率半径。
AF PE 、分别为过P 点和A 点的水准面。
PC 是PE 在P 点的切线,PN 为光程曲线。
当位于P 点的望远镜指向与PN 相切的PM 方向时,由于大气折光的影响,由N 点出射的光线正好落在望远镜的横丝上。
这就是说,仪器置于A 点测得M P 、间的垂直角为2,1a 。
由图5-35可明显地看出,B A 、 两地面点间的高差为NB MN EF CE MC BF h --++==2,1 (5-54)式中,EF 为仪器高NB i ;1为照准点的觇标高度2v ;而CE 和MN 分别为地球曲率和折光影响。
由2021s R CE =2021s R MN '=式中R '为光程曲线PN 在N 点的曲率半径。
设,K R R='则 20202.21S RK S R R R MN ='=K 称为大气垂直折光系数。
图5-352由于B A 、两点之间的水平距离0s 与曲率半径R 之比值很小(当km s 100=时,0s 所对的圆心角仅5'多一点),故可认为PC 近似垂直于OM ,即认为 90≈PCM ,这样PCM ∆可视为直角三角形。
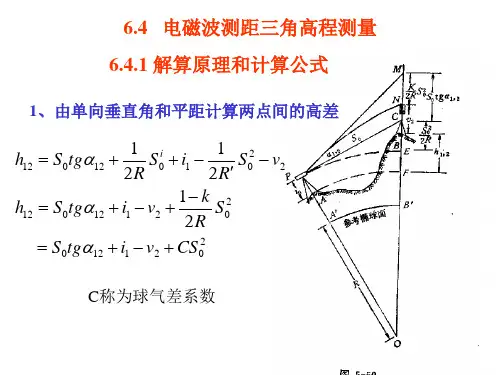
三角高程测量平差计算公式三角高程测量是一种通过测量两点间的垂直角度和水平距离来计算高差的方法。
在实际测量工作中,由于存在各种误差,为了得到更准确的结果,就需要进行平差计算。
下面咱就来好好聊聊三角高程测量平差计算公式。
先来说说为啥要进行平差计算。
咱就拿我之前参与的一个工程项目来说吧。
那是要给一座新建的大桥做测量,地形复杂得很,山高坡陡。
我们用三角高程测量法测量了很多个点的高程。
可测量完发现,这数据之间总是有那么点儿偏差,要是就这么直接用,那后面的工程设计可就得出大问题。
这就好比你做蛋糕,材料的量没称准,做出来的蛋糕能好吃吗?所以就得通过平差计算来把这些偏差给修正了,让测量结果更可靠。
三角高程测量平差计算的公式主要有间接平差和条件平差两种。
间接平差公式呢,就像是个“温柔的修正者”。
假设我们测量了 n 个高差观测值,每个观测值的改正数是 v,那么观测值和真值之间的关系可以表示为:L + v = Δh 。
这里的 L 是观测值,Δh 是真值。
然后通过最小二乘法原理,列出误差方程,再求解改正数 v 和未知参数。
条件平差公式则像是个“严格的把关者”。
比如有 r 个多余观测,就可以列出 r 个条件方程。
通过这些方程来求解改正数,让观测值满足这些条件,从而达到平差的目的。
在实际应用中,选择哪种平差方法得看具体情况。
比如说,如果已知的条件比较多,那就适合用条件平差;要是未知数比较多,间接平差可能更合适。
再举个例子,有一次我们在山区测量一个电力塔的高度。
那地方信号不好,测量仪器也受到了一些干扰。
测出来的数据怎么看都觉得不太对劲。
后来用三角高程测量平差计算公式进行处理,一点点分析误差来源,调整参数,终于得到了比较准确的数据,保证了电力塔建设的顺利进行。
总之,三角高程测量平差计算公式就像是测量工作中的“定海神针”,有了它,我们才能在复杂的测量环境中得到可靠的结果,为各种工程建设提供坚实的基础。
不管是架桥铺路,还是建高楼大厦,都离不开它的帮忙。
三角高程测量的计算公式
如图6.27所示,已知A点的高程H A,要测定B点的高程 H B,可安置经纬仪于A点,量取仪器高i A;在B点竖立标杆,量取其高度称
为觇 B 标高v B;用经纬仪中丝瞄准其顶端,测定竖直角α。
如果已知AB两点间的水平距离D (如全站仪可直接测量平距),则AB两
点间的高差计算式为:
如果当场用电磁波测距仪测定两点间的斜距D′,则AB两点间的高差计算式为:
以上两式中,α为仰角时tanα或sinα为正,俯角时为负。
求得高差h AB以后,按下式计算B 点的高程:
以上三角高程测量公式(6.27)、(6.28)中,设大地水准面和通过A、B点的水平面为相互平行的平面,在较近的距离(例如200米)内可
以认为是这样的。
但事实上高程的起算面——大地水准面是一曲面,在第一章1.4中已介绍了水准面曲率对高差测量的影响,因此由三
角高程测量公式(6.27)、(6.28)计算的高差应进行地球曲率影响的改正,称为球差改正f1,如图6.28(见课本)所示。
按(1.4)式:
式中:R为地球平均曲率半径,一般取R=6371km。
另外,由于视线受大气垂直折光影响而成为一条向上凸的曲线,使视线的切线方向向
上抬高,测得竖直角偏大,如图6.28所示。
因此还应进行大气折光影响的改正,称为气差改正f2,f2恒为负值。
图6.23 三角高程测量
图6.24 地球曲率及大气折光影响
设大气垂直折光使视线形成曲率大约为地球表面曲率K倍的圆曲线(K称为大气垂直折光系数),因此仿照(6.30)式,气差改正计算公式
为:
球差改正和气差改正合在一起称为球气差改正f,则f应为:
大气垂直折光系数K随气温、气压、日照、时间、地面情况和视线高度等因素而改变,一般取其平均值,令K=0.14。
在表6.16中列出水
平距离D=100m-200m的球气差改正值f,由于f1>f2,故f恒为正值。
考虑球气差改正时,三角高程测量的高差计算公式为:
或
由于折光系数的不定性,使球气差改正中的气差改正具有较大的误差。
但是如果在两点间进行对向观测,即测定h AB及h BA而取其平均
值,则由于f2在短时间内不会改变,而高差h BA必须反其符号与h AB取平均,因此f2可以抵消,f1同样可以抵消,故f的误差也就不起
作用,所以作为高程控制点进行三角高程测量时必须进行对向观测。
表6.16 三角高程测量地球曲率和大气折光改正(K=0.14)。