无人驾驶汽车转向系统控制
- 格式:docx
- 大小:60.01 KB
- 文档页数:20
无人驾驶汽车安全行驶的三大系统无人驾驶汽车是未来可能出现车队普及的重要代表。
这些车辆不需要人类司机。
它们是由一系列技术系统控制的。
了解这些系统可以让我们更好地了解这些车辆的安全性。
下面是三大无人驾驶汽车安全行驶的系统:1. 感知系统:无人驾驶汽车中的感知系统是基于Lidar、雷达和摄像机技术等各种高级传感器的。
这些传感器可以检测到车辆和其他物体周围的所有信息,相当于车辆的“眼睛”。
通过检测途中发生的事物,无人驾驶汽车可以实时响应,以确保安全行驶。
例如,当车辆检测到一个行人正在过马路的时候,它会立即停车,等待行人完成过马路并离开道路。
由于传感器技术的可靠性,感应系统可以避免大多数输入错误的情况,保证无人驾驶汽车的行驶安全。
2. 决策系统:决策系统是无人驾驶汽车中的核心系统。
它基于人工智能技术,可以处理传感器传回的大量数据,并快速做出决策。
例如,当车辆检测到一辆行驶非常缓慢的车辆时,决策系统会根据当前交通情况和候选路线计算最佳路线。
然后,该系统会向驾驶系统发出指令进行操作。
决策系统的质量直接影响到无人驾驶汽车的性能。
3. 控制系统:无人驾驶汽车的控制系统由多种电子设备组成。
这些设备可以根据决策系统的指令自动控制车辆的转向、加速和制动等。
该系统可以避免许多由人类驾驶员引起的错误,例如超速或误操作。
此外,一旦发生紧急情况,控制系统可以立即执行紧急刹车动作,停车避让,以保证行驶安全。
综上所述,无人驾驶汽车中的感知系统、决策系统和控制系统是保证无人驾驶汽车行驶安全的三大系统。
它们通过传感、处理和执行等过程完美配合,确保车辆在无人操作的情况下,能够准确地执行各项操作,保障行车安全。
无人驾驶汽车的技术与实现随着科技的不断发展,无人驾驶汽车成为了越来越多人热议的话题。
这种新型交通工具有着许多优势,例如更高的行驶安全性和更低的交通事故率,以及更为方便的出行体验。
那么,无人驾驶汽车的技术和实现方式是什么呢?本文将会进行详细的探讨。
一、无人驾驶技术的原理无人驾驶汽车的核心技术是自动驾驶技术。
自动驾驶技术主要是通过感知系统、决策系统、执行系统等多个子系统的协同作用来实现的。
感知系统:感知系统是无人驾驶汽车最重要的技术组成部分之一,主要包括相机、毫米波雷达、超声波雷达和激光雷达等多种传感器。
这些传感器能够感知到无人驾驶汽车周围的各种信息,如道路状况、行人、车辆、交通信号灯等。
决策系统:决策系统主要是根据感知系统获取的数据,对驾驶决策进行分析和评估。
在这个过程中,无人驾驶汽车会考虑内部与外部的各种情况,如车辆速度、方向、距离、环境状况、目的地等。
执行系统:执行系统根据决策系统的指令,执行各种驾驶动作。
例如,当无人驾驶汽车需要刹车或转向时,执行系统会接收到这些指令,并通过车辆内部的各种设备来实现。
二、无人驾驶汽车的实现方式无人驾驶汽车的实现方式有很多,以下列举了其中的几种:1、传感器组合方式传感器组合方式是无人驾驶汽车最常用的实现方式之一。
这种方式通常使用了多种传感器,例如激光雷达、摄像头、毫米波雷达等设备来进行环境感知。
2、制定行车路线制定行车路线是另一种常见的无人驾驶汽车实现方式。
行车路线通常是事先规划好的,无人驾驶汽车按照路线行驶,遇到障碍物或变化时自动更改路线。
3、远程操作远程操作也是无人驾驶汽车另一种常见的实现方式。
车辆通过网络连接,由远程操作员在安全地方获取反馈和控制信号,实现驾驶控制。
这种实现方式便于在各种复杂环境中进行自动驾驶。
三、无人驾驶汽车的优势和挑战无人驾驶汽车有着许多优势,例如:1、安全性高:无人驾驶汽车不会感到疲劳或突然情况的影响,比人类驾驶更加安全。
2、更有效地利用时间:无人驾驶汽车允许人们在行驶中进行其他活动,如工作、休息或娱乐等。
无人驾驶汽车的自动化控制系统解析自动驾驶汽车的技术已经成为现代科技领域的热门话题。
无人驾驶汽车的自动化控制系统是实现这一技术的核心。
本文将对无人驾驶汽车的自动化控制系统进行解析,从硬件到软件逐一剖析其组成和工作原理。
一、传感器系统无人驾驶汽车的自动化控制系统依赖于精确和准确的传感器系统来感知周围环境。
这一系统包括多种传感器,如激光雷达、摄像头、超声波传感器、毫米波雷达等。
激光雷达用于测量周围环境的距离和形状,摄像头用于识别道路标志和其他车辆,超声波传感器用于测量周围物体的距离和位置,毫米波雷达则可以探测到远距离的物体并提供更加精确的距离和速度信息。
这些传感器相互协作,为无人驾驶汽车提供全方位的环境感知能力。
二、数据处理与决策系统无人驾驶汽车的自动化控制系统还包括数据处理与决策系统。
这一系统基于传感器提供的数据,通过算法和模型进行数据处理和分析,并根据分析结果做出相应的决策。
数据处理与决策系统涵盖了多个关键模块,包括障碍物检测与跟踪、道路检测与车道保持、交通规则理解与遵守等。
这些模块综合起来,不仅可以让无人驾驶汽车判断前方是否存在障碍物和识别道路标志,还可以进行自主的车道保持和根据交通规则做出安全的驾驶决策。
三、执行系统执行系统是无人驾驶汽车的自动化控制系统的最后一环,它负责将数据处理与决策系统生成的指令转化为汽车的具体动作。
这一系统包括多个执行器,如电动马达、制动系统、转向系统等。
电动马达可以给车辆提供动力,制动系统用于控制车辆的减速和停车,转向系统则可以让车辆改变行驶方向。
执行系统与数据处理与决策系统紧密协作,在保证行车安全的前提下,实时响应数据处理与决策系统的指令,确保无人驾驶汽车按照预定路线和速度行驶。
四、安全与监控系统无人驾驶汽车的自动化控制系统中,安全与监控系统扮演着至关重要的角色。
这一系统可以监测整个自动驾驶过程中的风险和异常,并采取相应的措施保证乘客和行人的安全。
安全与监控系统通过实时监测传感器数据、数据处理与决策系统的输出以及执行系统的工作状态,检测到任何潜在的安全问题,并及时采取制动、警示等措施来应对。
无人驾驶汽车安全行驶的三大系统无人驾驶汽车是近年来科技领域进步的一个重要成果,它的出现给交通出行领域带来了巨大的变革和创新。
与此人们也对无人驾驶汽车的安全性和可靠性产生了担忧。
在实际的道路行驶中,如何确保无人驾驶汽车能够安全行驶成为了一个急需解决的问题。
为了解决这一问题,科技公司和汽车制造商们推出了许多安全系统,其中包括了影响无人驾驶汽车安全行驶的三大系统。
今天,我们将对这三大系统进行介绍,希望能够为大家解除对无人驾驶汽车安全性的顾虑。
第一大系统:传感器系统传感器系统是无人驾驶汽车中最重要的安全系统之一。
无人驾驶汽车需要通过各种传感器来感知周围环境和道路状况,以便做出相应的驾驶决策。
传感器系统通常包括激光雷达、毫米波雷达、摄像头、超声波传感器等多种类型的传感器。
这些传感器能够实时监测车辆周围的情况,包括行人、车辆、道路障碍物等,确保无人驾驶汽车在行驶过程中能够及时做出应对。
激光雷达是传感器系统中的重要组成部分,它能够通过激光束来扫描周围环境并得到高精度的距离数据。
激光雷达能够在各种天气条件下工作,并且对于各种物体都能够做出准确的探测和距离测量。
毫米波雷达则是通过发射和接收毫米波信号来探测周围物体的位置和速度,它适用于各种复杂的道路环境,如城市道路、高速公路等。
摄像头能够实时获取道路上的图像信息,并通过图像识别技术对周围的车辆、行人、交通标志等进行识别和跟踪。
超声波传感器能够检测车辆周围的障碍物,确保无人驾驶汽车在停车和倒车时避免碰撞。
传感器系统通过将各种传感器的信息进行融合和处理,能够为无人驾驶汽车提供全方位的周围环境感知能力,从而保障汽车在行驶过程中的安全性。
第二大系统:自动驾驶控制系统自动驾驶控制系统是无人驾驶汽车的核心系统之一,它能够通过计算机系统对汽车进行精确的控制和驾驶。
自动驾驶控制系统通常包括车辆动力系统、底盘控制系统、转向控制系统、制动系统等多个子系统的集成。
在车辆动力系统方面,无人驾驶汽车通常采用电动驱动或混合动力驱动技术,以实现高效和低排放的动力输出。
无人驾驶汽车的自动驾驶控制系统分析现代科技的持续发展使得无人驾驶汽车成为现实。
无人驾驶汽车的出现引起了广泛的讨论。
其中,自动驾驶控制系统是无人驾驶汽车的核心技术,它决定了车辆的安全性和行驶效果。
本文将对无人驾驶汽车的自动驾驶控制系统进行详细分析。
1. 无人驾驶汽车的自动驾驶控制系统概述无人驾驶汽车的自动驾驶控制系统是由多个组件组成的复杂系统。
它通过传感器从外部环境获取信息,并通过决策算法和执行机制来实现对车辆的控制。
该系统可以分为感知模块、决策模块和执行模块三部分。
2. 感知模块感知模块是自动驾驶控制系统的基础,它通过传感器获取车辆周围的环境信息。
常用的传感器包括摄像头、雷达、激光雷达和超声波传感器等。
这些传感器能够实时感知周围的障碍物、道路状况、交通标志和其他车辆等。
3. 决策模块决策模块根据感知模块提供的信息进行决策,确定车辆的行驶策略。
这个模块通常由多种算法组成,包括路径规划、障碍物避免和交通信号识别等。
它考虑到交通规则、路径优化和风险评估等因素,保证车辆在不同情况下做出正确的决策。
4. 执行模块执行模块是自动驾驶控制系统的执行者,其主要任务是控制车辆执行决策模块确定的动作。
这个模块控制车辆的加速、转向和刹车等操作,并与车辆的动力系统和操纵系统进行交互。
它还负责保证车辆的动作稳定、高效和安全。
5. 自动驾驶控制系统的挑战和应对自动驾驶控制系统的研发和应用面临着许多挑战。
首先,传感器的准确性和鲁棒性是关键问题,影响着系统的感知能力。
其次,决策算法的智能化和自适应性需要不断改进,以适应复杂多变的交通环境。
此外,执行模块的可靠性和安全性也是重要的考虑因素。
为应对这些挑战,研究人员们正在开发更先进的传感器技术,如高精度摄像头和毫米波雷达等。
他们还在不断改进决策算法,引入机器学习和人工智能等技术,以提高系统的自适应性和决策能力。
此外,强化学习等方法也被应用于系统的优化和控制。
同时,为确保系统的可靠性和安全性,自动驾驶汽车的相关法规和标准也在不断完善和制定。
无人驾驶汽车安全行驶的三大系统随着科技的不断进步,无人驾驶汽车正逐渐成为我们生活的一部分。
随之而来的问题是如何保证无人驾驶汽车的安全行驶。
为了解决这一问题,无人驾驶汽车通常会配备一系列的安全系统,以确保汽车在道路上行驶时不会出现意外事故。
本文将介绍无人驾驶汽车安全行驶的三大系统:感知系统、决策系统和控制系统。
感知系统是无人驾驶汽车安全行驶的第一道防线。
感知系统可以获取汽车周围环境的信息,包括道路状况、其他车辆的位置和速度、行人和障碍物等。
感知系统通常由激光雷达、摄像头、雷达和超声波传感器等组成,这些传感器可以覆盖汽车周围的各个方向,并能够实时监测周围环境的变化。
激光雷达可以测量物体和障碍物与汽车的距离,摄像头可以识别道路标志和交通信号,雷达可以探测其他车辆的位置和速度,而超声波传感器则可以探测靠近汽车的障碍物。
通过这些传感器获取的信息,无人驾驶汽车可以建立起对周围环境的详细认知,以便及时做出相应的决策。
决策系统是无人驾驶汽车安全行驶的第二道防线。
决策系统可以根据感知系统获取的环境信息,做出相应的决策,以确保汽车在道路上行驶时不会出现危险情况。
决策系统通常由算法和人工智能系统组成,这些系统可以对感知系统获取的信息进行分析和处理,然后制定出最佳的行驶方案。
当感知系统检测到前方有一辆车正在减速时,决策系统可以根据车辆的速度和距离,决定是否需要减速或换道。
当感知系统检测到有行人横穿马路时,决策系统可以做出相应的刹车措施,以避免发生事故。
通过决策系统的智能处理,无人驾驶汽车可以根据不同的交通情况和道路条件,做出最合适的行驶决策,从而确保汽车在道路上行驶的安全性。
控制系统是无人驾驶汽车安全行驶的第三道防线。
控制系统可以根据决策系统制定的行驶方案,控制汽车的转向、加速和制动等操作,以确保汽车在道路上行驶时可以保持稳定和安全。
控制系统通常由电子控制单元、传感器和执行器组成,这些组件可以协调工作,实现对汽车各个部件的精密控制。
人工智能无人驾驶汽车安全操作手册第一章:概述 (3)1.1 无人驾驶汽车的定义与分类 (3)1.2 无人驾驶汽车的安全性与可靠性 (3)第二章:技术原理 (4)2.1 感知系统 (4)2.2 决策系统 (4)2.3 控制系统 (4)2.4 通信系统 (5)第三章:安全操作规范 (5)3.1 启动与关闭操作 (5)3.1.1 启动操作 (5)3.1.2 关闭操作 (5)3.2 车辆行驶前的检查 (5)3.2.1 车辆外观检查 (5)3.2.2 车辆功能检查 (6)3.2.3 传感器与摄像头检查 (6)3.3 行驶过程中的注意事项 (6)3.3.1 保持安全距离 (6)3.3.2 注意观察交通状况 (6)3.3.3 遵守交通信号 (6)3.3.4 遇到特殊情况的处理 (6)3.4 紧急情况下的处理 (6)3.4.1 突发故障 (6)3.4.2 碰撞 (6)3.4.3 紧急制动 (7)第四章:自动驾驶功能使用 (7)4.1 自动驾驶模式的启动与切换 (7)4.1.1 启动条件 (7)4.1.2 启动方法 (7)4.2 自动驾驶功能限制与注意事项 (7)4.2.1 功能限制 (7)4.2.2 注意事项 (7)4.3 自动驾驶过程中的监控与干预 (8)4.3.1 监控 (8)4.3.2 干预 (8)4.4 自动驾驶系统故障处理 (8)4.4.1 故障诊断 (8)4.4.2 故障处理 (8)第五章:环境适应性 (8)5.1 不同天气条件下的驾驶策略 (8)5.2 不同道路条件下的驾驶策略 (9)5.3 夜间行驶操作要点 (9)5.4 环境感知系统的维护与保养 (9)第六章:故障诊断与处理 (10)6.1 故障诊断方法 (10)6.1.1 自诊断系统 (10)6.1.2 人工诊断 (10)6.2 常见故障及其处理方法 (10)6.2.1 传感器故障 (10)6.2.2 执行器故障 (11)6.3 紧急故障处理 (11)6.3.1 车辆失控 (11)6.3.2 系统故障 (11)6.4 维修与保养 (11)第七章:安全防护措施 (12)7.1 被动安全防护 (12)7.1.1 结构设计 (12)7.1.2 乘员约束系统 (12)7.2 主动安全防护 (12)7.2.1 驾驶辅助系统 (12)7.2.2 车辆稳定控制系统 (13)7.3 紧急制动系统 (13)7.4 安全距离控制 (13)第八章:法律法规与合规性 (13)8.1 无人驾驶汽车相关法律法规 (13)8.2 安全操作合规性要求 (14)8.3 驾驶员培训与资质 (14)8.4 法律责任与处理 (14)第九章:用户手册与维护保养 (15)9.1 用户手册内容与使用 (15)9.1.1 用户手册内容概述 (15)9.1.2 用户手册使用方法 (15)9.2 车辆维护保养周期与项目 (15)9.2.1 维护保养周期 (15)9.2.2 维护保养项目 (15)9.3 自我检查与维护 (16)9.4 专业维修与保养 (16)第十章:售后服务与客户支持 (16)10.1 售后服务政策 (16)10.2 客户投诉与处理 (17)10.3 技术支持与升级 (17)10.4 用户反馈与改进 (17)第一章:概述1.1 无人驾驶汽车的定义与分类无人驾驶汽车,顾名思义,是指无需人类驾驶员操作,能够自主完成行驶任务的汽车。
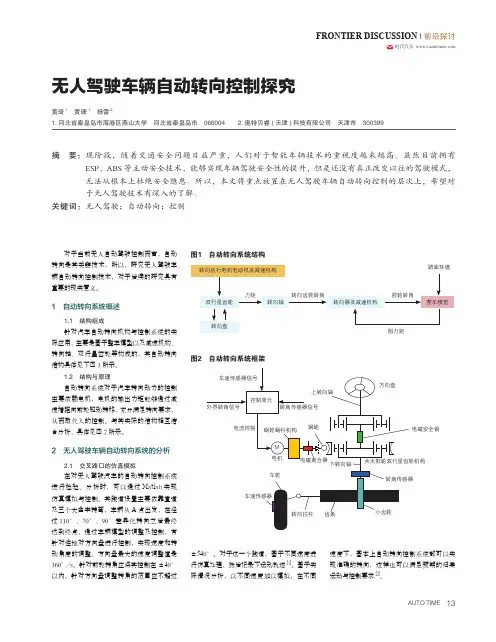
自动驾驶汽车的线控转向控制系统发布时间:2021-03-02T04:48:07.699Z 来源:《中国科技人才》2021年第3期作者:刘琦[导读] 基于传统汽车电动助力转向系统的基本结构,文中设计转向角度控制器模块和扭矩控制器模块,实现线控转向控制系统,以用于自动驾驶汽车的自动转向控制。
东风小康汽车有限公司摘要:基于传统汽车电动助力转向系统的基本结构,文中设计转向角度控制器模块和扭矩控制器模块,实现线控转向控制系统,以用于自动驾驶汽车的自动转向控制。
其中转向角度控制器硬件使用STM32F4系列单片机,主要用于实时计算出转向扭矩值,实现转向角度的闭环控制;扭矩控制器模块主要由STM32单片机和扭矩信号生成电路构成,用于检测扭矩传感器输入及模拟扭矩传感器输出。
分别设计转向角度控制器软件和扭矩控制器软件,最后在某轿车上部署测试,车辆的转向角度控制快速精准,实现了自动驾驶车辆平台的转向控制功能。
关键词:自动驾驶汽车;线控转向系统;角度控制器;扭矩控制器引言:自从谷歌于2009年布局自动驾驶,自动驾驶技术引发了新一轮的产业热潮,且自动驾驶车辆在军事、工业、农业等各领域都有应用需求。
对于自动驾驶汽车,线控转向系统是无人驾驶汽车的重要执行机构,将驾驶意图中的转向信号通过电信号形形式发送到转向电机,由转向电机驱动转向轮。
传统驾驶汽车的转向控制是通过电动助力转向系统(ElectricPowerSteering,EPS)实现转向控制。
而电动助力转向系统是建立在传统机械转向系统的基础之上,由转向操纵机构、扭矩传感器、动力转向电动机转向传动机构转向角度传感器等系列机械和电子控制装置构成。
本设计根据目前的的。
而电动助力转向系统是建立在传统机械转向系统的基础之上,由转向操纵机构、扭矩传感器、动力转向电动机转向传动机构转向角度传感器等系列机械和电子控制装置构成。
本设计根据目前的电动助力转向系统的结构原理,设计线控转向控制系统,使汽车能根据实时的转向输入信息实现转向自动控制。
如何在无人驾驶模式下实现灵活转向近年来,随着科技的不断发展,无人驾驶汽车逐渐成为现实。
无人驾驶技术的突破,使得汽车能够自主感知和决策,实现自动驾驶。
然而,在无人驾驶模式下,如何实现灵活转向成为一个重要的问题。
本文将探讨如何在无人驾驶模式下实现灵活转向。
首先,为了实现灵活转向,无人驾驶汽车需要具备高精度的定位和感知能力。
定位是指汽车能够准确地知道自己的位置和方向,感知是指汽车能够感知周围环境和障碍物。
只有具备了这两个能力,汽车才能够做出准确的转向决策。
其次,无人驾驶汽车需要具备智能的决策和控制系统。
决策系统是指汽车能够根据定位和感知的信息,做出合理的转向决策。
控制系统是指汽车能够根据决策系统的指令,实现精确的转向控制。
这两个系统的配合是实现灵活转向的关键。
然而,要实现灵活转向,并不仅仅是依靠技术的突破。
还需要考虑到道路交通规则和人类行为的因素。
无人驾驶汽车需要能够理解和遵守交通规则,与其他车辆和行人进行良好的协同。
此外,还需要能够适应不同的驾驶环境和路况,包括城市道路、高速公路和乡村道路等。
只有在考虑到这些因素的基础上,无人驾驶汽车才能够实现真正的灵活转向。
为了实现灵活转向,无人驾驶汽车还需要具备自主学习和适应能力。
自主学习是指汽车能够通过不断的实践和经验积累,提高自己的驾驶能力和决策水平。
适应能力是指汽车能够根据不同的驾驶环境和路况,调整自己的行为和策略。
只有具备了这两个能力,无人驾驶汽车才能够在不同的情况下实现灵活转向。
最后,为了实现灵活转向,无人驾驶汽车还需要满足安全和可靠的要求。
安全是指汽车能够避免事故和碰撞,保证乘客和周围行人的安全。
可靠是指汽车能够在各种情况下保持稳定和可靠的性能。
只有在安全和可靠的基础上,无人驾驶汽车才能够实现灵活转向。
综上所述,实现灵活转向是无人驾驶汽车发展的一个重要方向。
为了实现灵活转向,无人驾驶汽车需要具备高精度的定位和感知能力,智能的决策和控制系统,考虑交通规则和人类行为的因素,自主学习和适应能力,以及安全和可靠的要求。
无人驾驶车辆的自动路径选择与转向技巧随着科技的不断进步,无人驾驶车辆正逐渐成为现实。
这些自动驾驶车辆通过激光雷达、摄像头、传感器等设备,能够感知周围环境并做出相应的决策。
其中,自动路径选择与转向技巧是保证车辆安全行驶的关键。
一、自动路径选择的原则无人驾驶车辆在选择行驶路径时,需要遵循一些基本原则。
首先,安全是最重要的考虑因素。
车辆应该选择没有障碍物、交通流量较小的道路,以最大程度地减少事故发生的可能性。
其次,效率也是一个重要的因素。
车辆应该选择最短的路径,以节省时间和能源。
最后,考虑到乘客的舒适度,车辆还应避免选择颠簸不平的路面。
二、自动路径选择的策略为了满足以上原则,无人驾驶车辆可以采用多种策略进行路径选择。
一种常见的策略是基于地图数据的路径规划。
车辆可以事先获得道路网络的地理信息,根据交通状况和预设目的地,选择最佳路径。
这种策略能够在大部分情况下保证车辆的安全和效率。
然而,地图数据并不总是准确和实时的,因此无人驾驶车辆还需要具备实时感知和决策的能力。
通过激光雷达、摄像头等设备,车辆可以实时感知周围的交通情况和道路状况。
基于这些信息,车辆可以做出即时的决策,选择最合适的路径。
例如,当车辆感知到前方有拥堵时,可以选择绕行或改变行驶速度,以避免堵车。
三、自动转向技巧的实现自动转向技巧是无人驾驶车辆安全行驶的关键之一。
在转向过程中,车辆需要准确判断道路状况和周围车辆的动态变化,以及正确控制方向盘和转向角度。
为了实现自动转向,无人驾驶车辆通常采用电动转向系统。
这种系统通过电机控制方向盘的转动,实现车辆的转向操作。
同时,车辆还需要搭载传感器和算法,以感知车辆当前的位置和方向,并根据路况和行驶目标,计算出最佳的转向角度。
除了基本的转向操作,无人驾驶车辆还需要具备一些高级的转向技巧。
例如,在高速公路上,车辆可以利用车道保持辅助系统,自动调整转向角度,保持车辆在车道内行驶。
在紧急情况下,车辆还可以通过紧急制动和转向操作,快速避让障碍物或避免碰撞。
自动驾驶汽车线控转向系统线控转向是自动驾驶汽车实现路径跟踪与避障避险必要的关键技术,其性能直接影响主动安全与驾乘体验。
在国际汽车工程师协会(Society of Automotive Engi⁃neers,SAE)发布的5级自动驾驶体系中:▪第1级为驾驶辅助,要求对转向或加、减速中单独一项进行自动控制;▪第2级为部分自动驾驶,要求对转向和加、减速中的2项进行自动控制;▪第3级及以上分别为有条件自动驾驶、高度无人驾驶和完全自动驾驶,要求转向逐步与其他子系统实现高度自主协同。
线控转向系统为自动驾驶汽车实现自主转向提供了良好的硬件基础,且线控转向系统被认为是实现高级自动驾驶的关键部件之一,具有以下优点:线控转向技术由于可实现驾驶员操作和车辆运动的解耦可提高紧急情况下转向操作正确性和驾驶员安全性采用电机控制直接驱动实现车辆转向,因此更容易与车辆其他主动安全控制子系统进行通讯和集成控制。
与传统的转向系统不同,线控转向系统取消了从转向盘到转向执行器之间的机械连接,完全由电控系统实现转向,可以摆脱传统转向系统的各种限制,汽车转向的力传递特性和角度传递特性的设计空间更大,更方便与自动驾驶其他子系统(如感知、动力、底盘等)实现集成,在改善汽车主动安全性能、驾驶特性、操纵性以及驾驶员路感方面具有优势。
1.线控转向系统发展概况线控转向的概念起源于20世纪50年代,美国天合(TRW)公司最早提出用控制信号代替转向盘和转向轮之间的机械连接,之后德国Kasselmann 和Keranen设计了早期的线控转向模型。
受制于电子控制技术,直到20世纪90年代,线控转向技术才有较大进展,美国、欧洲、日本在线控转向的研发与推广方面比较活跃,一些采用线控转向系统的概念车陆续展出。
2013年,英菲尼迪的“Q50”成为第1款应用线控转向技术的量产车型。
该线控转向系统由路感反馈总成、转向执行机构和3个电控单元组成,其中双转向电机的电控单元互相实现备份,可保证系统的冗余性能,转向柱与转向机间的离合器能够在线控转向系统出现故障时自动接合,保证紧急工况下依然可实现对车辆转向的机械操纵。
无人驾驶汽车安全行驶的三大系统
无人驾驶汽车安全行驶的三大系统
无人驾驶汽车是一种利用计算机和传感器技术实现自主驾驶的汽车。
为了保证无人驾
驶汽车的安全行驶,需要依赖三个关键的系统,分别是感知系统、决策系统和控制系统。
感知系统是无人驾驶汽车最核心的系统之一,它包括多种传感器,如摄像头、激光雷达、毫米波雷达和超声波传感器等。
这些传感器能够实时地感知车辆周围的环境,并提供
准确的车辆位置、道路状况、行人和其他障碍物的信息。
感知系统能够帮助无人驾驶汽车
识别和跟踪其他车辆、判断车道线、识别交通信号灯和行人等,为决策系统提供准确的数
据和信息。
决策系统是无人驾驶汽车的智能核心,它基于感知系统提供的数据和信息来做出决策。
决策系统使用复杂的算法和模型来分析和推断车辆周围的环境,并生成相应的行驶策略和
路径规划。
它能够判断车辆是否需要减速或加速、是否需要变道、合适的加速度和转向角
度等。
决策系统还能够与其他车辆和交通管理系统进行通信,根据交通信号灯和道路标志
来做出相应的决策。
决策系统的安全性和稳定性对于无人驾驶汽车的行驶安全至关重要。
控制系统是无人驾驶汽车的执行系统,它通过控制车辆的传动系统、刹车系统和转向
系统等来实现决策系统生成的行驶策略。
控制系统根据决策系统的指令对车辆进行精确的
控制,并及时地响应各种情况和突发事件,保证车辆的稳定、平稳和安全行驶。
控制系统
还能够与感知系统和决策系统进行实时的数据交流和同步,以实现全面的自主驾驶。
无人驾驶汽车安全行驶的三大系统无人驾驶汽车是一种通过计算机系统和传感器技术来自主驾驶的车辆。
为了保证无人驾驶汽车的安全行驶,需要依靠三大系统:感知系统、决策系统和执行系统。
感知系统是无人驾驶汽车的“眼睛”和“耳朵”,通过激光雷达、摄像头、超声波传感器等装置来感知周围环境。
激光雷达可以量测车辆周围的距离,摄像头可以识别道路标志、交通信号灯和行人等,超声波传感器可以探测附近车辆的距离和速度。
感知系统收集到的数据通过算法进行处理,为决策系统提供所需的环境信息。
感知系统的性能直接影响着无人驾驶汽车的安全性,因此其技术和可靠性需要不断提升。
决策系统是无人驾驶汽车的“大脑”,主要负责根据感知系统提供的信息,制定合理的行驶策略。
决策系统需要分析和预测周围的交通状况和道路条件,以便正确地做出驾驶决策。
当感知系统检测到前方有行人横穿马路时,决策系统会及时采取减速或者绕行的措施。
决策系统还需要根据优先级和道路规则来处理交通情况,如遵守交通信号灯和让行规定等。
决策系统的准确性和灵活性决定了无人驾驶汽车的驾驶水平和行驶安全。
执行系统是无人驾驶汽车的“手脚”,负责根据决策系统的指令实施具体的驾驶操作。
执行系统通常由电机、制动器和转向器等装置组成,用于控制车辆的加速、制动和转向。
执行系统需要根据决策系统的指令,合理地控制车辆的速度和方向,以保证行驶的平稳和安全。
执行系统还需要实时监测车辆的状态,例如发动机转速、车速和方向盘的位置等,以便及时进行调整和修正。
执行系统的可靠性和精准性对于无人驾驶汽车的行驶安全至关重要。
除了以上三大系统,无人驾驶汽车还需要依靠相关的人机交互技术进行信息交流。
驾驶员可通过语音指令或者触摸屏幕向车辆输入目的地位置,而车辆也会通过显示屏和音频播报等方式将行驶信息和警告信息传达给驾驶员。
这种人机交互技术能够提高驾驶员对无人驾驶汽车的信任度,从而增强行驶安全。
无人驾驶汽车的安全行驶依赖于感知系统、决策系统和执行系统的协同工作。
无人驾驶车辆的运动控制发展现状综述一、本文概述随着科技的飞速发展和的广泛应用,无人驾驶车辆作为智能交通系统的重要组成部分,已经引起了全球范围内的广泛关注。
无人驾驶车辆的运动控制作为其核心技术之一,对于实现车辆安全、高效、自主的行驶至关重要。
本文旨在综述无人驾驶车辆运动控制的发展现状,包括其基本原理、关键技术、最新研究成果以及面临的挑战和未来的发展趋势。
通过对相关文献的梳理和分析,本文旨在为无人驾驶车辆运动控制的研究者和实践者提供一个全面、深入的视角,以期推动该领域的进一步发展。
二、无人驾驶车辆运动控制的基础技术无人驾驶车辆的运动控制是自动驾驶技术的核心组成部分,涉及到多个关键的基础技术领域。
车辆动力学建模是实现精确运动控制的前提。
这包括建立车辆运动方程,描述车辆在不同道路和行驶条件下的动态行为。
通过精确的模型,控制系统可以预测车辆在不同操作下的响应,从而做出合适的控制决策。
路径规划和轨迹生成是无人驾驶车辆运动控制的重要组成部分。
路径规划主要负责确定车辆的全局路径,而轨迹生成则负责在确定的路径上生成具体的时间-空间轨迹。
这些轨迹需要满足车辆的动力学约束,同时也要考虑安全性、舒适性和效率等因素。
在控制算法方面,无人驾驶车辆的运动控制主要依赖于先进的控制理论和方法。
例如,线性控制理论(如PID控制)、非线性控制理论(如滑模控制、反演控制)以及智能控制方法(如模糊控制、神经网络控制、强化学习等)都被广泛应用于无人驾驶车辆的运动控制中。
这些控制方法的选择取决于具体的控制任务和控制目标。
感知和决策技术也是无人驾驶车辆运动控制不可或缺的一部分。
感知技术负责获取车辆周围的环境信息,包括道路、交通信号、障碍物等。
决策技术则根据感知信息以及车辆自身的状态和目标,生成合适的控制指令。
这些指令会传递给运动控制系统,实现对车辆的精确控制。
无人驾驶车辆的运动控制还需要考虑与车辆其他系统(如导航系统、感知系统、决策系统等)的集成和协同工作。
无人驾驶汽车转向系统控制
摘要
伴随现代科技发展,无人驾驶汽车成为了新的研究热点,引领着汽车产业的发展方向。
为了保证汽车在道路上正常行驶,解决无人驾驶汽车的转向控制成为了关键性问题。
而融合先进的电子技术、信息技术和控制技术的线控转向技术被越来越多的科技工作者所青睐。
本文对无人驾驶汽车转向系统控制进行了研究。
本文首先对无人驾驶汽车自动转向控制的研究现状进行了分析介绍。
然后根据汽车转向时驾驶员操纵方向盘的实际情况,设计了转向执行机构。
根据电路原理设计控制器的电源电路、程序烧写电路、信号调理电路和电机驱动电路,并绘制电路图。
在此基础上,考虑到实际实验条件限制,采用仿真实验方法。
运用MATLAB中的SIMLINK建立电机模型。
在电机控制选择上,为保证电机平稳运转,采用了PID闭环控制方法对电机进行控制。
然后采用与CARSIM联合仿真的方法对转向系统进行了可行性实验。
仿真实验结果证明,转向控制器可以有效控制仿真车进行转向。
关键词:无人驾驶汽车;线控转向;CARSIM和MATLAB联合仿真
Steering system control of unmanned vehicle
Abstract
With the development of modern science and technology, autonomous vehicle has become a new research hotspot, which can greatly improve the security of the transportation system. In order to ensure the normal running of the vehicle, the steering control of unmanned vehicles has become a key issue. And the integration of advanced electronic technology, information tech-nology and control technology of steer by wire technology is favored by more and more scien-tists and technicians.
This paper researches the control system of unmanned vehicle steering system. This paper introduces the research status of automatic steering control for unmanned vehicles.According to the procedure of the power supply circuit, this paper designs controller programming circuit, signal conditioning circuit and motor drive circuit, and draw circuit diagram. On the basis of this, taking the actual experimental conditions into account, this paper chooses the simulation method. This paper uses MATLAB in SIMLINK to build motor model. In order to ensure the smooth op-eration of the motor, the PID closed loop control method is used to control the motor. Then this paper has focused on the method that combines with the CARSIM simulation of the steering controller for the feasibility of the experiment. The experimental results show that the steering controller can effectively control the steering of the simulation vehicle.
Key words:Unmanned vehicle;SBW;CARSIM and MATLAB joint simulation
目录
1前言 (1)
1.1无人驾驶汽车发展 (1)
1.2国内外智能汽车大赛 (4)
1.3汽车线控转向技术 (4)
1.4本文主要研究内容 (5)
2转向执行机构的设计 (5)
2.1电机选型与介绍 (5)
2.2夹紧盘机构的设计 (6)
2.3本章小结 (8)
3电路模块 (9)
3.1电源电路设计 (9)
3.2程序烧写电路 (11)
3.3信号调理电路 (11)
3.4电机驱动电路 (12)
3.5本章小结 (12)
4建模与仿真实验 (13)
4.1PID控制原理 (13)
4.2转向机构的建模与仿真 (14)
4.3PID与转向机构联合建模 (17)
4.4SIMLINK与CARSIM联合仿真 (19)
4.5本章小结 (20)
5总结与展望 (16)
1前言
继电动汽车之后,又一典型高新技术的综合体——无人驾驶汽车再次颠覆人类对于汽车的传统认识,不仅成为了车辆工程领域的一颗新星,而且领跑着全球汽车工业,成为各个国家汽车发展的新兴力量。
这种汽车,又可以称为移动载人(载货)智能机器人,可以协助人们实现长途跋涉,降低人类劳动强度,为人类生活提供方便快捷的服务。
安全和舒适是影响其发展的主要因素。
舒适性可以通过应用新型悬挂技术、改变座椅的设计、采用良好的减震降音材料和应用更先进的人车交互界面来提高其性能。
安全性是当下限制无人驾驶汽车发展的关键性所在,其关键在于能够保证汽车在道路上行驶的稳定可靠,并且能够安全完成预定的路径到达期望的目的地。
目前的无人驾驶汽车是通过传感器(雷达、摄像等)和全球定位系统GPS获取外界环境,感知周围路径行驶情况,然后将信息传送到汽车控制器,汽车的控制器对获取的信息进行判断、分析并做出决策,将命令下达给执行器控制汽车行驶,实现起步、加速、行驶、转向、减速、泊车等行车步骤。
在遇到复杂的路况时,汽车的控制器能够计算出最佳的行车方案,指挥汽车正常运行,顺利行驶。
无人驾驶汽车将驾驶员从驾驶位置上剔除,其意义将公路交通系统的效率大大提高,并且使人们告别了无聊的长途驾驶,提高社会生产率保障乘坐人员安全[1]。
无人驾驶汽车由于其高度的智能化和舒适性深受人们关注,也正由于它市场的广阔行而吸引了很多全球很多高新技术和IT企业青睐。
根据麦肯锡的预测,2025年无人驾驶汽车可以带来的市场产值能够达到2000亿—1.9万亿美元;市场研究公司预测,2035年四级完全无人驾驶汽车年销量可以达到480万辆[2]。
智能化行业的发展也促使各式各样的无人驾驶汽车的出现,而这之中拥有类似人类大脑的自主控制的智能汽车发展迅速。
通过各类传感器感知环境后由EUC综合信息,用控制策略分析计算,然后控制汽车速度与转向,完成汽车行驶。
智能汽车的转向系统有别于机械转向系。
传统转向方式是驾驶员控制方向盘经过转向器将动力传给转向传动机构使产生转动效果带动车身完成转向。
无人驾驶汽车实现转向是通过线控转向系统完成指定的角度与角速度来实现的[3]。
1.1无人驾驶汽车发展
无人驾驶汽车的研究最早在20世纪在很多科技发达的国度就开始举行了。
开发研究进程十分迅速,在美国和欧洲国家,已经有少数研发型汽车接近量产,并上路行驶。
作为新兴产业,无人车在我国的发展也非常迅速,越来越多企业与个人更加关注无人驾驶汽车的发展,作为一项新型科技,无人驾驶汽车的发展速度也没有让人失望。
表1-1和表1-2列出来部分国外和国内企业研究和发展现状,通过对比可以更好的了解当今世界无人驾驶汽车的发展。