GNSS双天线定位定向系统.doc
- 格式:doc
- 大小:44.00 KB
- 文档页数:2
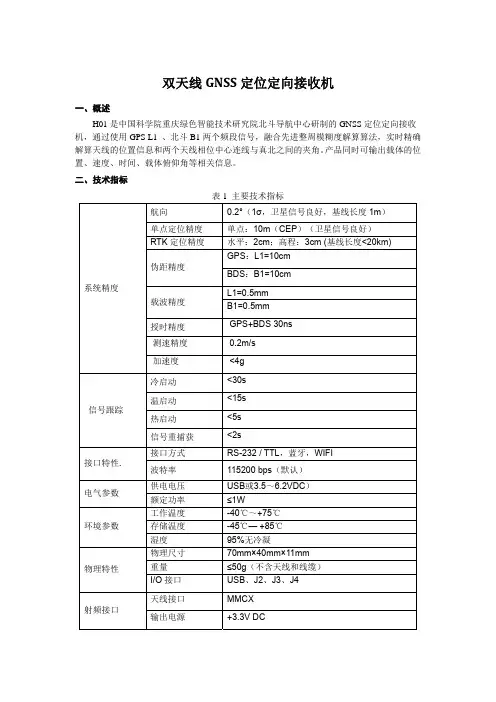
gnss两种基本定位原理GNSS (Global Navigation Satellite System) 是一种全球导航卫星系统,它使用卫星和接收器之间的信号交互来实现高精度的定位和导航。
GNSS系统包括多个卫星定位系统,其中最为广泛使用的是GPS (Global Positioning System) 和GLONASS (Global Navigation Satellite System)系统。
GNSS的基本定位原理主要通过三角测量和时间测量来确定接收器的位置。
首先,我们来了解一下三角测量原理。
在GNSS中,至少需要三颗卫星的信号来确定接收器的位置。
每颗卫星发送包含时间、卫星位置和其他信息的信号。
接收器接收到这些信号后,会通过测量信号到接收器的时间差来确定卫星和接收器之间的距离。
接收器同时也会记录卫星的位置。
通过至少三颗卫星的距离和位置信息,接收器可以使用三角测量原理来计算出接收器的位置。
这是因为在三维空间中,通过三个点(即三颗卫星的位置)可以确定一个位置。
其次,我们来了解一下时间测量原理。
每颗卫星都会发送精确的时间标记信号。
接收器通过接收到的信号,测量信号的传播时间,并将其转换为卫星和接收器之间的距离。
接收器同时还需要准确知道卫星的位置,以便进行精确的距离计算。
为了解决这个问题,卫星会在信号中包含自身的位置信息。
通过使用多颗卫星的距离和位置信息,接收器可以使用时间测量原理来计算出接收器的位置。
综上所述,GNSS的基本定位原理主要是通过三角测量和时间测量来确定接收器的位置。
通过计算接收器和多颗卫星之间的距离,以及卫星的位置信息,接收器可以精确地计算出自身的位置。
这一原理不仅适用于GPS和GLONASS系统,也适用于其他的GNSS系统。
GNSS的基本定位原理在现代导航和定位应用中起着至关重要的作用。
无论是车载导航系统、航空导航系统还是手机定位功能,都离不开这一原理。
通过GNSS系统,我们可以在全球范围内准确地确定我们的位置,并进行导航和定位服务。
双天线GPS/SINS组合导航系统设计摘要:利用双天线定向gps与光纤陀螺进行组合,以基于dsp+fpga多处理器结构作为导航计算机平台,应用卡尔曼滤波算法将gps姿态信息作为量测量对惯性导航系统进行修正。
通过跑车实验验证该系统具有实时性好,运算精度高等优点。
关键词:定向gps 组合导航卡尔曼滤波引言现代导航系统要求能够实时、准确的获取载体运动信息。
目前,在组合导航领域gps/sins组合导航系统因具有高精度、低成本、结构简单等优点,已经成为最热门的研究方向。
而gps/sins组合导航大多都是以位置,速度作为量测量来修正惯性导航系统,随着gps定向系统的逐渐发展,以姿态、位置和速度的全组合方法正在成为研究热点[1]。
本文根据gps/sins全组合导航系统的机理和特点在基于dsp+fpga的导航计算机平台上设计了可靠的信息融合技术,通过相关的试验表明本系统具有较好的效果。
一、组合导航系统软硬件设计1导航计算机总体设计为了便于野外跑车试验,本文中导航系统采用一体化、模块化设计:通过接口将导航计算机固连于imu器件内,计算机与imu方便更换。
imu数据更新率是200hz,而gps数据输出频率为1hz,因此计算机必须能够在5ms内完成整个系统算法运行。
单纯的采用一个核心处理器的方法不能够满足系统实时性要求,此计算机采用了dsp+fpga双核设计方式,dsp选用ti公司的tms6747而fpga型号为xilinx公司的xc3s500e。
系统硬件结构如图1所示。
其中,dsp6747主要负责imu解算,卡尔曼滤波等数据处理算法,6747具有高性能的浮点运算能力,最高主频可达到450mhz,能够实现高速运算。
fpga主要完成外部接口扩展(2路rs232口,1路rs422口),数据的采集与传输及逻辑时序控制。
2组合导航系统的量测方程将定向gps作为修正数据时,系统量测值包括位置、速度和姿态。
位置量测值为惯导系统与gps给出的纬度、经度和高度差,相应的速度量测值为惯导系统与gps给出在惯性系统中各坐标下的差值,而惯导系统与双天线gps给出的姿态差值作为第三组量测值。
DGS680双天线微惯性组合定位定向系统感谢您购买和使用慧联科技的双天线微惯性组合定位定向系统DGS680。
本文将对产品的性能指标,安装使用和软件使用做详细介绍。
1.产品概述DGS680 是无锡慧联信息科技有限公司推出的一系列高性能的GNSS(北斗+GPS+ GLONASS)双天线定位定向系统,该系统可以完成基于北斗、GPS、GLONASS的双天线高精度定向,两米基线定向精度小于0.1°,并且基线长度没有限制。
单点定位精度也可达1.5米,结合基站可实现高精度定位(厘米级定位)。
该产品结合基于MEMS的微惯性传感器,可很好完成组合导航、定位和定向,克服了短期遮挡和信号失锁问题。
图1 产品外观图2.产品特点:•采用北斗B1、GPS L1、GLONASS L1三系统联合定位或单系统定位;•同时实现航向角和滚动角、俯仰角的测量;•无基线长度限制;•支持外接频标,支持PPS输出;•结合INS技术可以在短时遮挡和信号失锁时保持航向和位置推算;•高动态数据输出,数据更新率可高达60Hz;•高可靠的载波跟踪技术,大大提高了载波精度,为用户提供高质量的原始观测数据;•智能动态灵敏度定位技术,适应各种环境的变换,适应更加恶劣、更远距离的定位环境;•全面的高精简报文,易于数据传输及配套软件的应用开发;•体积小、重量轻、功耗低、性价比高•可根据客户需求定制数据输出格式•支持定制化服务,可以满足不同行业应用的特殊需求3.产品应用:航空航天、机械控制、系统集成、勘探、精准农业、交通、海洋、港口、气象、国防、科研院所、大专院校等行业的高精度差分定位、测姿、测向、测距、变形测量、授时等。
4.性能指标:1.信号跟踪:80通道北斗B1 I支路C码;GPS L1 C/A码、L1;GLONASS L1;SBAS:WAAS,EGNOS,MSAS;Galileo可选2.精度指标(GNSS)单点定位精度:1.5m (RMS);SBAS精度:0.6m (RMS);差分定位精度:0.4 m (RMS)3.测姿测向精度:滚动角、俯仰角精度:0.1°;航向角精度:0.1°(2米基线)4.授时精度:20ns5.信号跟踪:冷启动:<50s ;温启动:<30s ;热启动:<15s ;信号重捕获:<2s6.位移精度(CEP):测量运行距离和实际运行距离的差值a:≤0.4米(GNSS差分定位)b:≤±5米(推算100米)7.航向保持:≤5°(2min)8.加速度传感器的主要技术指标:a:量程:±2gb:灵敏度:1.0mgc:灵敏度校准误差:±1%d:非线性:±1%FS9.速率陀螺的主要技术指标:a:测量角速度:±500deg/sb:分辨率:0.07 deg/sc:零偏稳定性:±0.2 ( 在±250°/秒时) °/secd:线性度:±0.5%FS.10.数据格式标准NMEA-0183Compass 二进制自定义CMR/CMR+ 支持RTCM2.3 支持RTCM3.0 支持11.物理特性尺寸130mm (L)×90mm (W)×80mm (H)安装尺寸:不大于90mm×130mm;重量< 1kg外部频标输入接口:MCX12.射频接口天线接口:TNC 母头输出电源:+3.3V DC输出电流:<100mA13.通讯接口:2个RS232(115200bps)14.数据更新率卫星导航定位数据更新率:1Hz、5Hz、10Hz惯导更新率:60Hz15.电气特性:输入电压:5V~18.5V DC功耗:小于5.0W16.环境条件:工作温度:-40℃—+85℃存储温度:-55℃—+95℃湿度:95%无冷凝17.振动:2g(均方根值)/20-500Hz;18.冲击:20g(垂直方向)19.防水等级:IP65级5.产品配套GNSS双天线微惯性组合定位定向系统主机1台GNSS天线 2 只数据电源线 2 条天线电缆线 2 条配套软件光盘 1 张说明书 1 份6.安装使用1.电缆连接COM1:串口1为主信号输入输出口,标准RS232接口,同时可为设备提供电源;COM2:串口2为辅助信号输入输出口,标准RS232接口,同时可为设备提供电源;ANT1:1号天线射频接口;ANT2:2号天线射频接口;PPS: 秒脉冲输出接口。
gnss定位方法1.1 gnss呢,就是全球导航卫星系统(Global Navigation Satellite System)的简称。
这可不得了,就像是天空中给咱们地面上的人或者东西指路的一群小天使一样。
它是由卫星、地面控制站和用户接收设备这三大部分组成的。
卫星在太空里转啊转,不停地发射信号,这些信号就包含着卫星的位置啊、时间啊这些重要的信息。
1.2 咱们的用户接收设备呢,就像是一个特别聪明的小耳朵,专门用来接收卫星发出来的信号。
一旦接收到足够多卫星的信号,就可以通过一些计算方法来确定自己的位置了。
这就好比你在一个大森林里迷路了,但是周围有几个灯塔,你能看到灯塔的光,还知道灯塔的位置,那你就能算出自己在哪里了。
2.1 单点定位。
这是最基本的一种定位方法。
简单来说,就是用户接收设备只依靠接收到的卫星信号,直接计算出自己的位置。
就像你自己一个人根据周围的地标来判断自己的位置一样,比较直接,但是精度可能就没有那么高了。
有时候可能会有个几十米的误差,这在一些要求不是特别精确的场合还能用,比如说你开车的时候大概知道自己在哪个路段附近。
2.2 相对定位。
这个就比较有趣了。
它是通过在两个或者多个观测点上同时观测卫星信号,然后利用这些观测值之间的关系来确定观测点之间的相对位置。
这就好比你和你的小伙伴在森林里,你们都能看到那些灯塔,然后通过互相交流看到灯塔的情况,就能更精确地知道你们之间的距离和相对位置。
这种方法的精度可比单点定位高多了,能达到厘米级甚至毫米级呢,在测量土地、建造大型建筑物的时候可就派上大用场了。
2.3 差分定位。
这可以说是相对定位的一种特殊形式。
它是利用一个已知精确位置的基准站,基准站会计算出它观测到的卫星信号的误差,然后把这个误差发送给附近的用户接收设备。
用户接收设备收到这个误差信息之后,就可以对自己观测到的卫星信号进行修正,从而提高定位的精度。
这就像是有一个经验丰富的老向导,他知道哪里有陷阱(误差),然后告诉你,你就能更准确地找到路了。
双天线GPS定向方法1. GPS测量方法GPS测量的基本方法有两种,一是伪距测量;二是载波相位测量。
载波相位测量精度要远高于伪距测量精度。
(1)伪距测量由于卫星钟、接收机钟的误差以及大气延迟误差的影响,实际测出的距离与实际的卫星到接收机几何距离有一定差值,故一般称测出的距离为伪距。
伪距观测量按精度可分为C/A码(粗码)和P码(精码)。
伪距观测量的精度一般为码元长度的1/100。
C/A码码元长度为293m,故其观测精度大致为2.93m;P码码元长度为29.3m,故其观测精度大致为0.29m。
(2)载波相位测量载波相位测量是接收机测量得到的卫星载波信号与接收机产生的参考载波信号之间的相位差。
载波相位观测量的精度一般为载波长度的1/100,L1载波的波长λ1=19cm,其测距精度为0.19cm;L2载波的波长λ2=24cm,其测距精度为0.24cm。
所以在测量相位精度相同的情况下,载波相位测量误差对测距精度的损失,较P码码相测量误差小两个数量级;载波相位测量的距离分辨率也较P码码相测量的距离分辨率高得多。
在需要高精度测量的场合,如姿态测量系统中采用载波相位观测量进行数据处理。
由于载波不携带有测距码的任何信息,所以载波相位测量通常也称为无码测量,载波是一种周期性的正弦信号。
因此,采用载波相位法是系统测量精度的保证。
系统接收L1 载波信号,有16 个L1 C/A 码独立信道。
系统启动后,满足解算条件后,便可自动对整周模糊度进行初始化,初始化结束后,解算模式转到固定整周模式,最高可达20HZ 频率输出解算结果,基线2m 时定向精度0.08°,基线长度增加,可提高定向精度。
若在载体上配置不共线的三个GPS 天线, 可构成两条互相独立的基线。
通过这两条基线在载体坐标系和地理坐标系中的坐标位置可以在载体坐标系中建立三个互相正交的矢量,从而解算出三维姿态参数。
2. GPS姿态测量技术GPS姿态测量解算流程为:要使GPS具备姿态测量功能,需满足一下条件:(1)接收机使用两个或更多天线。
gnss双天线定向原理GNSS双天线定向原理引言:全球导航卫星系统(GNSS)已经成为现代定位和导航的基础设施,广泛应用于航空航天、交通运输、地质勘探等领域。
GNSS双天线定向技术是一种基于GNSS信号的方向测量方法,通过利用双天线接收器的多路径效应,可以实现对目标位置的高精度定向。
本文将介绍GNSS双天线定向原理及其应用。
一、GNSS基本原理GNSS是由一组卫星和地面接收器组成的系统,利用卫星发射的信号进行定位和导航。
GNSS系统中最常见的是全球定位系统(GPS),它由24颗卫星组成,每颗卫星都会周期性地向地面发送信号。
地面接收器接收到多颗卫星的信号后,通过计算信号传播时间和接收器位置,可以确定接收器的位置。
二、双天线定向原理双天线定向原理是一种利用多路径效应实现方向测量的技术。
在GNSS信号传播过程中,信号会经历多次反射和折射,到达接收器的时间和方向会发生变化。
双天线定向技术利用这种多路径效应,在接收器接收到信号的两个天线之间产生相位差。
根据相位差的变化,可以计算出信号传播的方向。
三、双天线定向算法双天线定向算法主要包括相位差测量和方向计算两个步骤。
在相位差测量过程中,接收器获取两个天线接收到的信号的相位信息,并计算出相位差。
在方向计算过程中,根据相位差和已知的天线间距,可以使用三角定位等方法计算出目标位置的方向。
四、双天线定向应用双天线定向技术在航空航天、交通运输、地质勘探等领域有着广泛的应用。
在航空航天领域,双天线定向技术可以用于飞机的导航和定位,提高飞行安全性和精确性。
在交通运输领域,双天线定向技术可以用于车辆的导航和定位,提高交通管理的效率。
在地质勘探领域,双天线定向技术可以用于地震监测和勘探设备的定位,提高勘探效果和安全性。
五、双天线定向技术的优势与传统的方向测量方法相比,双天线定向技术具有以下几个优势:1. 高精度:双天线定向技术可以实现对目标位置的高精度定向,满足各种应用场景的定位要求。
GNSS双天线定位定向系统
定位定向是运动控制、火力打击、组合导航.姿态控制中最重要的参数,其梅确度和稳定性直接影响
了后续计算结果,对系统的整休性能起到了决定性作用。
北京七维航测科技股份有限公司利用载波相位测T&技术和优化的算法,研制开发了基于BD&GPS的优向系统•它克版J'陀螺寻北仪动态性差、
操作复朵,磁罗盘精度低、响应慢、抗T•扰性差、不易安装以及单频接收机定向抗干扰性能差等缺点,产品具有测虽精度高、稳定性好、无漂移、无累枳误差、不受礎变化影响等特点。
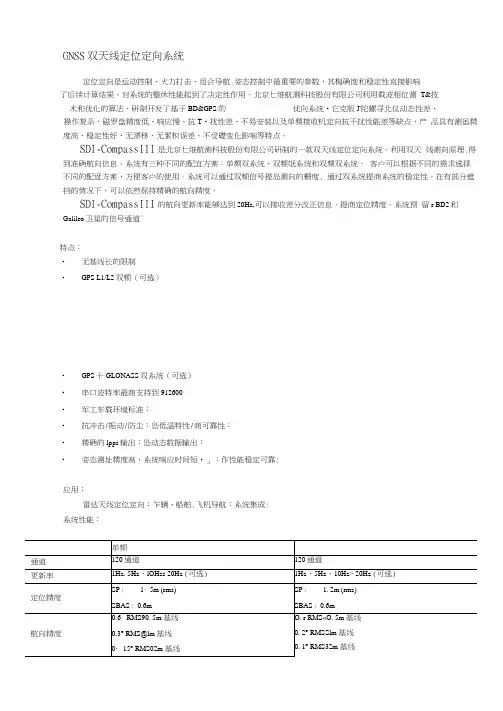
SDI-CompassIII是北京七维航测科技股份有限公司研制的一款双天线定位定向系统。
利用双天线测向原理.得到准确航向信息。
系统有三种不同的配宜方案:单频双系统、双频氓系统和双频双系统,客户可以根据不同的需求选择不同的配迓方案,方便客户的使用。
系统可以通过双频信号提岛测向的柵度, 通过双系统提商系统的稳定性,在有部分遮挡的情况下,可以依然保持精确的航向精度。
SDI-CompassIII的航向更新率能够达到20Hz,可以接收差分改正信息,提商定位精度。
系统预留r BD2和Galileo卫星的信号通道°
特点:
•无基线长的限制
•GPS L1/L2双频(可选)
•GPS十GLONASS双系统(可选)
•串口波特率最商支持到912600
•军工车载环境标准:
•抗冲击/振动/防尘:岛低温特性/商可靠性:
•精确的lpps输出:岛动态数据输出:
•姿态测址精度髙,系统响应时间短•」:作性能稳定可靠:
应用:
雷达天线定位定向:乍辆、船舶.飞机导航:系统集成:
系统性能:
环境指标。
双天线GPS定位定向接收机工作原理及组成
一、设备的基本组成及框图
定位定向接收机有两部分基本组成:主机、接收天线。
基本原理框图如下:
主机:主机内部(基本定位定向功能)由两块接收机板卡和一块主控电路板实现。
二、基本工作原理:
主机工作时,两块接收机板卡分别接收前、后天线的卫星信号进行自身的位置信息解算;在这个过程中,利用其中一块接收机板卡(如接收机1)作为基准向另一块接收机板卡(如接收机2)发送位置解算修正信息,使“接收机2”在进行位置解算时受基准“接收机1”的相对限制(在这里,具体那个接收机作为基准,是可以初始设定)。
两块接收机板卡在工作时,分别把自己解算的位置信息及卫星原始信息发给主控电路板的核心信息处理器。
处理器中定向算法通过利用接收机发过来的信息及根据卫星接收天线间距离不变的条件求解两点连线与真北的夹角。
主控电路板根据项目应用的需要设计,基本有电源管理电路、信息处理电路、状态管理电路和接口管理电路。
双天线测向原理和发展历程在GPS相对定位技术应用于姿态测量以前,传统的定位定向姿态测量通常会用到磁强计、加速计和陀螺仪等设备。
这些传统姿态测量系统属于自主式系统,具有较好的自主性,但其缺点也较为明显。
一方面,传统磁强计、加速度计,虽具有良好的自主性,受外界干扰小,能测量各种高速姿态变化,但本身存在的漂移效应导致无法进行持久的测量。
另一方面,惯性导航系统由于漂移效应的存在,每经过一段时间就需要对测量数据进行必要的修正,这样做的目的是为了保证在使用过程中数据的准确性。
另外,许多载体需要实现全球全天候的实时测量,传统的姿态测量系统显然不能满足实际需要。
如果完全依赖传统测量设备,必将降低载体姿态或航向测量的效率,增加了使用的难度和成本。
载体基于GPS载波相位测量技术的方法可以较好的克服传统测量手段的缺点,同时具有自己无与伦比的优势和潜力。
载波相位测量技术可以实现安装在载体上的GPS天线间的精确相对定位。
利用这些精确相对定位的数据,可以很方便的计算载体的姿态或航向。
随着GPS模块集成化程度的提高,其体积、功耗、重量和成本都越来越具有竞争优势。
例如,双天线GPS测向系统只需要GPS接收机、两个GPS天线以及具有计算功能的硬件平台,就能够独立完成基本的载体姿态测定。
通过GNSS板卡、三轴光纤陀螺和加速度计组合并采用紧耦合技术,解决了INS惯导长时间的漂移或GNSS卫星受到限制时,而不能正常定位和导航的问题。
INS能够保证导航数据的有效性和连续性,同时也提高了GNSS的重捕获速度;GNSS对提高INS的测量精度也有明显的辅助作用,尤其是利用GPS双天线测向技术对航向精度大幅度提高。
GNSS与INS二者相互补偿,相互作用,为用户提供稳定、高精度的三维位置信息、姿态信息、速度和时间等信息。
SDI-600GI 双天线测向光纤惯导系统是北京七维航测科技股份有限公司自主研发的高精度GNSS/INS 组合惯导系统。
特点:应用:双天线测向技术陆地导航GNSS+INS 紧耦合技术航空应用体积小/精度高/可靠性高船载舰载平台稳定车载移动摄影测量系统性能:系统性能指标陀螺性能指标单点L1/L2DGPS RTK<2m <50cm 1cm+1ppm测量范围±300°/sX,Y,Z 速度精度(rms)0.02m/s 偏差稳定性1°/hr 1PPS 精度20ns 比例因子精度1500ppm航向精度0.05°随机游走0.0667°/√hr (Max)俯仰/横滚精度0.02°加速度计性能指标数据更新率100Hz 测量范围:X/Y/Z ±10g 速度515m/s偏差:X/Y/Z ±50mg 电气指标偏差稳定性±0.75mg 输入电压9~18VDC比例因子精度4000ppm功耗30W(Max)环境指标天线电压+5VDC工作温度-40℃~+80℃物理指标存储温度-40℃~+85℃尺寸15.2cm×16.8cm×11.5cm冲击6g重量 2.48kg防水IP67GPS天线连接器TNC湿度95%无冷凝通讯接口RS-232UART COM USBEVENT INPUT1PPS输出2个1个1个1个。