tinyos编译环境搭建(windows)
- 格式:doc
- 大小:189.50 KB
- 文档页数:4
安装TinyOS需要六个步骤。
1.Installing a Java 1.5 JDK.安装java jdk 1.5需要配置环境变量2.Install Cygwin.安装Windows下的Linux模拟器,cygwin3.Installing native compilers.安装单片机工具,AVR或MSP430,根据自己需要。
4.Installing the nesC compiler.安装nesC和TinyOS_tool5.Installing the TinyOS source tree.安装TinyOS2.0.2主文件。
6.Installing the Graphviz visualization tool安装Graphviz并配置环境变量一.安装JDK 1.5下载JDK 2.5 在SUN的官方网站/. 安装并配置JDK的环境变量。
二.安装Cygwin下装Cygwin-1.2a于/dist-1.2.0/tools/windows/cygwin-1.2a.tgz这个版本TinyOS官方测试过,和TinyOS兼容度高。
三.安装单片机工具下载以下五个rpm包1.avr-binutils-2.15tinyos-3.cygwin.i386.rpm(/di st-2.0.0/tools/windows/avr-binutils-2.15tinyos-3.cygwin.i386.rpm)2.avr-gcc-3.4.3-1.cygwin.i386.rpm(/dist-2.0.0/t ools/windows/avr-gcc-3.4.3-1.cygwin.i386.rpm)3.avr-libcavr-libc-1.2.3-1.cygwin.i386.rpm(/dist-2.0.0/too ls/windows/avr-libc-1.2.3-1.cygwin.i386.rpm)4.avariceavarice-2.4-1.cygwin.i386.rpm(/dist-2.0.0/tools/ windows/avarice-2.4-1.cygwin.i386.rpm)5.insight (avr-gdb) avr-insight-6.3-1.cygwin.i386.rpm(/dist-1.2.0/to ols/windows/avr-insight-6.3-1.cygwin.i386.rpm)下载完成之后把五个包都拷贝到Cygwin的tmp文件夹(在Windows操作即可) 依次安装(要按照顺序安装,它们之间有依赖关系),安装命令如下。
thinstation编译环境搭建以及编译简介1. thinstation编译环境搭建在开始编译thinstation之前,我们需要先搭建好编译环境。
以下是一些步骤和工具,可帮助您快速搭建thinstation编译环境:a. 安装Linux发行版本:thinstation主要是在Linux环境下进行编译和开发,所以您需要选择一个合适的Linux发行版本来搭建编译环境。
常见的Linux发行版本有Ubuntu、Debian、Fedora等。
选择一个您熟悉或偏好的版本,并按照官方文档进行安装。
b. 安装必要的工具和依赖项:在搭建thinstation编译环境之前,您需要安装一些必要的工具和依赖项,例如GCC编译器、make、git等。
您可以使用包管理工具,如apt、yum等来安装这些工具和依赖项。
在安装完必要的工具和依赖项之后,您还可以安装一些可选的工具,如Subversion、Curl等,以方便您进行开发和下载源代码。
c. 下载thinstation源代码:在搭建好编译环境后,您需要下载thinstation 的源代码。
您可以通过Git工具来下载thinstation的最新版本的源代码。
运行“git cloned. 配置编译环境:在下载完thinstation源代码后,您需要进行一些配置,以准备好编译环境。
进入thinstation源代码所在的目录,运行“./configure”命令可以生成编译所需的配置文件。
您可以根据您的需求,修改配置文件中的一些选项,例如网络设置、显示设置等。
e. 编译thinstation:在完成编译环境的配置后,您可以开始编译thinstation。
运行“make”命令可以开始编译thinstation。
编译过程可能需要一些时间,取决于您的机器配置和网络速度。
如果一切顺利,您将在编译完成后得到一个可执行的thinstation镜像文件。
2. thinstation编译简介thinstation是一个开源的轻量级操作系统,用于将普通计算机转变为瘦客户机(thin client)。
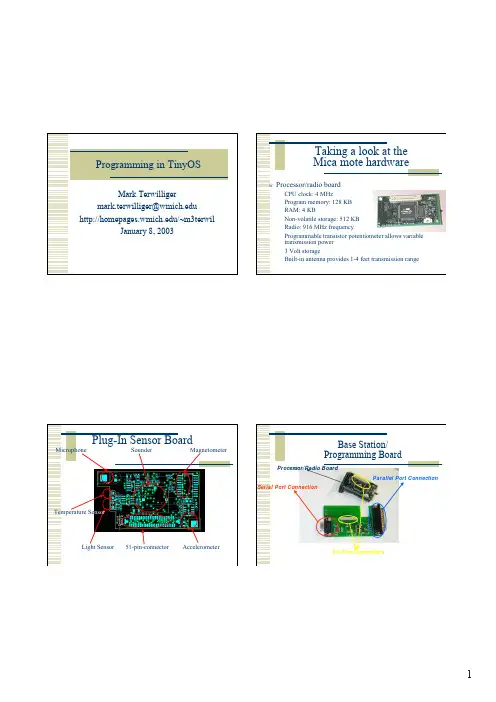
Programmable transistor potentiometer allows variable Built-in antenna provides 1-4 feet transmission rangeLight Sensor 51-pin-connector Temperature Se nsorAccelerometerSerial Port ConnectionParallel Port ConnectionProcessor/Radio Board51-Pins ConnectorsWhat is TinyOS?w Small, open source, energy efficient operating system designed by UC Berkeley w It was designed specifically for networked sensorsw Event-based systemEach system module is designed to operate bycontinually responding to incoming eventsMore TinyOS stuffw Two-level schedulingEvent handlers deal with hardware interrupts Tasksl Execution mechanism provided for long runningcomputationsl Runs to completion in backgroundl Can be interrupted by low-level system eventsl Task scheduling performed by simple FIFO queueMore TinyOS stuffw ComponentsAllows application developers to combineindependent components into an applicationspecific configurationA specialized language, NESC, was developed toexpress a component graph and the command/event interfaces between componentsThe TinyOS web sitew /tos/index.html DownloadSupportPublicationsHardware DesignsRelated WorkThe TinyOS download & install /tos/download.htmlw Installation packages available for:Windows 2000/XPl Choice of Installshield or Manual installationLinuxw Installation includes other software (Cygwin, JDK, avr tools, etc.)The TinyOS directoryw TinyOS subdirectories:appscontribdoctoolstosSpecification of aTinyOS programw A nesC application consists of one ormore components linked together to form an executablew A component provides and uses interfaces. These interfaces are the only point of access to the component and are bi-directionalw An interface declares a set of functions called commands that the interface provider must implement and another set of functions called events that the interface user must implementSpecification of aTinyOS programw For a component to call the commands in an interface, it must implement the events of that interfacew A single component may use or provide multiple interfaces and multiple instances of the same interfaceImplementation of aTinyOS programw There are two types of components in nesC: modules and configurationsw Modules provide application code, implementing one or more interfacew Configurations are used to assemble other components together, connecting interfaces used by components to interfaces provided by others. This is called wiringImplementation of aTinyOS programw Every nesC application is described by a top-level configuration that wires together the components insidew nesC uses the filename extension ".nc" for all source files --interfaces, modules, and configurationsWhat is NesC?w Network Embedded Systems Cw C-like syntax supporting TinyOSw Reference manual online:/papers/nesc-ref.pdfTinyOS Tutorialsw Provide sample programs with explanation of code w Tutorials included with TinyOS installationw Most up-to-date version of tutorials are online: /tos/tinyos-1.x/doc/tutorial/index.htmlCompiling and uploadingw To compile a TinyOS application, you must first enter the directory of the appw Type: make <platform>w Valid platforms include: mica, mica2, mica2dot w To compile and install: make <platform> install w To assign ID #: make <platform> install.X where X is the node ID (0, 1, 2, …)More compiling and uploading w To install a program that has already been built (no rebuild of target),type: make reinstall[.X] <platform>w To compile a program for use with the TOSSIM simulator, type: make pcw Note: For more information about the TOSSIM simulator, see Lesson 5 in the tutorial:/tos/tinyos-1.x/doc/tutorial/lesson5.htmlExample #1: Blinkw Lesson 1 in the tutorial:/tos/tinyos-1.x/doc/tutorial/lesson1.htmlExample #2: Sensingw Lesson 2 in the tutorial:/tos/tinyos-1.x/doc/tutorial/lesson2.htmlExample #3: Using the radio w Lesson 4 in the tutorial:/tos/tinyos-1.x/doc/tutorial/lesson4.htmlWhat should I do next?1.Download and install TinyOS2.Read the first four tutorialsw Implement the tutorials (schedule TBA)3.Read Chapter 1 of the WSN textbook4.Read “System Architecture Directions forNetworked Sensors”What should I do next? 5.Think about project ideas –use yourimagination//news/article.html?item_id=285/dataman/ActiveTape/Tree/Technologies we haven’t tried yet:Mica2Dot motesTASKNetwork reprogrammingSimulatorsOther helpful linksw Crossbow: Spec sheets and prices for Berkeley motes and othersensor network productsw Search the TinyOS mailing list archives: /tos/search.html。
安装TinyOS需要六个步骤安装TinyOS需要六个步骤。
1.Installing a Java1."5 JDK.安装java jdk1."5需要配置环境变量2.Install Cygwin.安装Windows下的Linux模拟器,cygwin安装单片机工具,AVR或MSP430,根据自己需要。
安装nesC 和TinyOS_tool5.Installing the TinyOS source tree.安装TinyOS2."0.2主文件。
6.Installing the Graphviz visualization tool安装Graphviz并配置环境变量一.安装JDK1."5下载JDK二.安装Cygwin下装Cygwin-1."2a于http:1."2.0/tools/windows/cygwin-1."2a.tgz这个版本TinyOS官方测试过,和TinyOS兼容度高。
三.安装单片机工具下载以下五个rpm包1.avr-binutils-2."15tinyos-3."cygwin.i386."rpm(http:2."0.0/tools/windows/avr-binutils-2."15tinyos-3.cygwin.i386."rpm)2.avr-gcc-3."4.3-1."cygwin.i386."rpm(http:2."0.0/tools/windows/avr-gcc-3."4.3-1."cygwin.i 386."rpm)3.avr-libcavr-libc-1."2.3-1."cygwin.i386."rpm(http:2."0.0/tools/windows/avr-libc-1."2.3-1.cygwin.i 386."rpm)4.avariceavarice-2."4-1."cygwin.i386."rpm(http:2."0.0/tools/windows/avarice-2."4-1."cygwin.i386."rpm)5.insight(avr-gdb)avr-insight-6."3-1."cygwin.i386."rpm(http:1."2.0/tools/windows/avr-insight-6."3-1."cygwin.i386."rpm)下载完成之后把五个包都拷贝到Cygwin的tmp文件夹(在Windows操作即可)依次安装(要按照顺序安装,它们之间有依赖关系),安装命令如下。
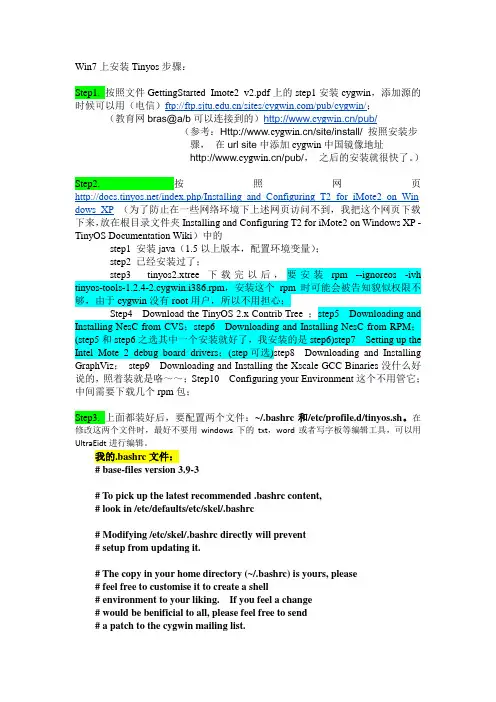
Win7上安装Tinyos步骤:Step1. 按照文件GettingStarted_Imote2_v2.pdf上的step1安装cygwin,添加源的时候可以用(电信)ftp:///sites//pub/cygwin/;(教育网bras@a/b可以连接到的)/pub/(参考:/site/install/ 按照安装步骤,在url site中添加cygwin中国镜像地址/pub/,之后的安装就很快了。
)Step2. 按照网页/index.php/Installing_and_Configuring_T2_for_iMote2_on_Win dows_XP(为了防止在一些网络环境下上述网页访问不到,我把这个网页下载下来,放在根目录文件夹Installing and Configuring T2 for iMote2 on Windows XP - TinyOS Documentation Wiki)中的step1 安装java(1.5以上版本,配置环境变量);step2 已经安装过了;step3 tinyos2.xtree下载完以后,要安装rpm --ignoreos -ivh tinyos-tools-1.2.4-2.cygwin.i386.rpm,安装这个rpm时可能会被告知貌似权限不够,由于cygwin没有root用户,所以不用担心;Step4 Download the TinyOS 2.x Contrib Tree ;step5 Downloading and Installing NesC from CVS;step6 Downloading and Installing NesC from RPM;(step5和step6之选其中一个安装就好了,我安装的是step6)step7 Setting up the Intel Mote 2 debug board drivers;(step可选)step8 Downloading and Installing GraphViz;step9 Downloading and Installing the Xscale GCC Binaries没什么好说的,照着装就是咯~~;Step10 Configuring your Environment这个不用管它;中间需要下载几个rpm包;Step3. 上面都装好后,要配置两个文件:~/.bashrc和/etc/profile.d/tinyos.sh。

TinyOS系统与nesC程序设计课内实验指导书一、课内实验项目一览表二、详细实验指导书实验一:编程环境建立一实验目的1、掌握Java基本开发环境(JDK)的安装和配置方法。
2、掌握cygwin程序的安装,在建立windows下类似Unix环境。
3、掌握Linux基本命令及cygwin下安装TinyOS的方法。
二实验原理无三实验环境1、运行Windows的PC机,能够连接Internet2、PC机配置要求:四实验内容和步骤1、java jdk安装首先,我们安装JA V A开发工具JA V A JDK 1.6官方下载地址:/javase/downloads/.安装过程只需下一步……下一步便可,默认安装路径是C:\Program Files\Java上图是TinyOS 2.0.2 安装时截取的JA V A JDK1.5的图,只供参考。
然后,我们需要设置电脑的环境变量,需要新建两个环境变量,以便使用JDK 具体过程如下:右击我的电脑——〉属性——〉高级——〉环境变量先新建或编辑系统变量:变量名(N):JA V A_HOME变量值(V):JDK安装的路径,其默认的路径为:C:\Program Files\Java\jdk1.6.0_10变量名(N):CLASSPATH变量值(V):.;%JAVA_HOME%\lib\dt.jar;%JAVA_HOME%\lib\tools.jar;;%JAVA_HOME%\bin;%JAVA_HOME%\jr e\bin;在系统变量(S)栏选中变量为Path的选项,点编辑在变量值(V)的末尾添加:;%JAVA_HOME%\bin; ;%JAVA_HOME%\jre\bin;然后新建或编辑用户变量:同样再设置一个JAVA_HOME,变量值也一样。
在用户变量的PATH中添加:;%JAVA_HOME%\bin:$PATH;%JAVA_HOME%\jre\bin:$PATH;这样,我们的环境变量已经设置完毕了。
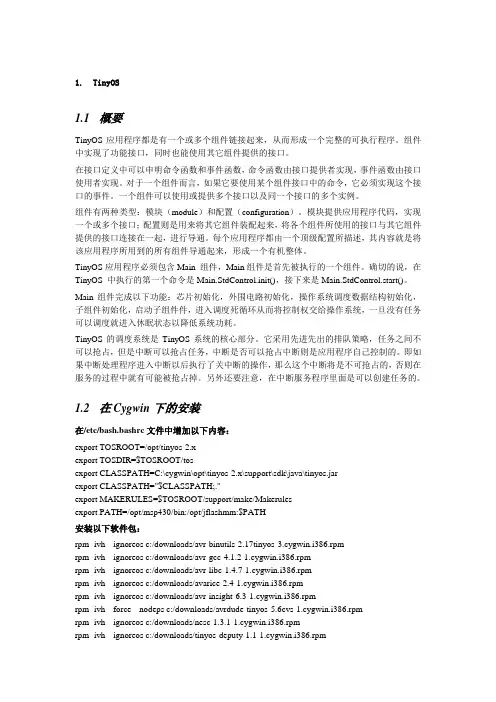
1.TinyOS1.1概要TinyOS应用程序都是有一个或多个组件链接起来,从而形成一个完整的可执行程序。
组件中实现了功能接口,同时也能使用其它组件提供的接口。
在接口定义中可以申明命令函数和事件函数,命令函数由接口提供者实现,事件函数由接口使用者实现。
对于一个组件而言,如果它要使用某个组件接口中的命令,它必须实现这个接口的事件。
一个组件可以使用或提供多个接口以及同一个接口的多个实例。
组件有两种类型:模块(module)和配置(configuration)。
模块提供应用程序代码,实现一个或多个接口;配置则是用来将其它组件装配起来,将各个组件所使用的接口与其它组件提供的接口连接在一起,进行导通。
每个应用程序都由一个顶级配置所描述,其内容就是将该应用程序所用到的所有组件导通起来,形成一个有机整体。
TinyOS应用程序必须包含Main 组件,Main组件是首先被执行的一个组件。
确切的说,在TinyOS 中执行的第一个命令是Main.StdControl.init(),接下来是Main.StdControl.start()。
Main组件完成以下功能:芯片初始化,外围电路初始化,操作系统调度数据结构初始化,子组件初始化,启动子组件件,进入调度死循环从而将控制权交给操作系统,一旦没有任务可以调度就进入休眠状态以降低系统功耗。
TinyOS的调度系统是TinyOS系统的核心部分。
它采用先进先出的排队策略,任务之间不可以抢占,但是中断可以抢占任务,中断是否可以抢占中断则是应用程序自己控制的。
即如果中断处理程序进入中断以后执行了关中断的操作,那么这个中断将是不可抢占的,否则在服务的过程中就有可能被抢占掉。
另外还要注意,在中断服务程序里面是可以创建任务的。
1.2在Cygwin下的安装在/etc/bash.bashrc文件中增加以下内容:export TOSROOT=/opt/tinyos-2.xexport TOSDIR=$TOSROOT/tosexport CLASSPATH=C:\cygwin\opt\tinyos-2.x\support\sdk\java\tinyos.jarexport CLASSPATH="$CLASSPATH;."export MAKERULES=$TOSROOT/support/make/Makerulesexport PATH=/opt/msp430/bin:/opt/jflashmm:$PATH安装以下软件包:rpm -ivh --ignoreos c:/downloads/avr-binutils-2.17tinyos-3.cygwin.i386.rpmrpm -ivh --ignoreos c:/downloads/avr-gcc-4.1.2-1.cygwin.i386.rpmrpm -ivh --ignoreos c:/downloads/avr-libc-1.4.7-1.cygwin.i386.rpmrpm -ivh --ignoreos c:/downloads/avarice-2.4-1.cygwin.i386.rpmrpm -ivh --ignoreos c:/downloads/avr-insight-6.3-1.cygwin.i386.rpmrpm -ivh --force --nodeps c:/downloads/avrdude-tinyos-5.6cvs-1.cygwin.i386.rpmrpm -ivh --ignoreos c:/downloads/nesc-1.3.1-1.cygwin.i386.rpmrpm -ivh --ignoreos c:/downloads/tinyos-deputy-1.1-1.cygwin.i386.rpmrpm -ivh --ignoreos c:/downloads/tinyos-tools-1.4.0-3.cygwin.i386.rpmrpm -ivh --ignoreos c:/downloads/tinyos-2.1.1-3.cygwin.noarch.rpmrpm -ivh --ignoreos c:/downloads/msp430tools-base-0.1-20050607.cygwin.i386.rpm rpm -ivh --ignoreos c:/downloads/msp430tools-python-tools-1.0-1.cygwin.noarch.rpm rpm -ivh --ignoreos c:/downloads/msp430tools-binutils-2.16-20050607.cygwin.i386.rpm rpm -ivh --ignoreos c:/downloads/msp430tools-gcc-3.2.3-20050607.cygwin.i386.rpm rpm -ivh --ignoreos c:/downloads/msp430tools-libc-20080808-1.cygwin.i386.rpmrpm -ivh --ignoreos c:/downloads/xscale-elf-binutils-2.15-1.cygwin.i386.rpmrpm -ivh --ignoreos c:/downloads/xscale-elf-gcc-3.4.3-1.cygwin.i386.rpmrpm -ivh --ignoreos c:/downloads/xscale-elf-newlib-1.11.0tinyos-1.cygwin.i386.rpm修改执行/usr/bin/tos-install-jni文件:change: "for lib in $tinyoslibdir/*-$bits.dll" to "for lib in $tinyoslibdir/*.dll"/usr/bin/tos-install-jni修改/usr/bin/python2.5-config文件:change: "/tmp/python.6884/usr/bin/python2.5.exe" to "/usr/bin/python2.5.exe"编译Blink测试是否安装成功:cd /opt/tinyos-2.x/apps/Blinkmake telosbmake mica2make micazmake micaz sim1.3Blink程序结构Blink.nc文件configuration Blink {}implementation {components Main, BlinkM, SingleTimer, LedsC;Main.StdControl -> SingleTimer.StdControl;Main.StdControl -> BlinkM.StdControl;BlinkM.Timer -> SingleTimer.Timer;BlinkM.Leds -> LedsC;}BlinkM.nc文件module BlinkM {provides {interface StdControl;}uses {interface Timer;interface Leds;}}因为它提供了StdControl 接口,所以它必须实现StdControl.init(),StdControl.start()及StdControl.stop()等命令,因为它使用了Timer接口,所以它必须实现Timer.fired()事件implementation {command result_t StdControl.init() {call Leds.init();return SUCCESS;}command result_t StdControl.start() {// Start a repeating timer that fires every 1000msreturn call Timer.start(TIMER_REPEAT, 1000);}command result_t StdControl.stop() {return call Timer.stop();}event result_t Timer.fired(){call Leds.redToggle();return SUCCESS;}}。
Micaz节点的Tinyos系统安装安新升说明:为了留底也锻炼大家的动手能力,我写了这个文档,里面有我做的时候的步骤和需要注意的问题,算是比较详细了,文档中有问题的话可找我一起讨论!首先,介绍一下Tinyos,TinyOS是UC Berkeley(加州大学伯克利分校)开发的开放源代码操作系统,专为嵌入式无线传感网络设计;但是与一般系统不同的是,Tinyos不能安装在Winsows系统中,它是在LINUX系统下的进行开发的系统,所以它的安装分为两种:(1)在WINDOWS XP 下安装cgwin,再在cgwin中安装Tinyos,所以cgwin的作用只是一个平台(2)安装一个LINUX 系统——ubuntu,在ubuntu下安装Tinyos,个人感觉cgwin中安装比较复杂,而且接触一下ubuntu进行LINUX开发也是件好事,所以我选择的后者,下面的介绍也是这种方法。
我的系统是WIN7.言归正传,说一下安装步骤:第一步:划分出一块新的磁盘空间,20G左右,建立一个新磁盘,也就是看着哪个磁盘可用空间比较大,拿出点来建立一个新的压缩卷。
注意:(1)划分磁盘空间时,先要拿出空间的磁盘是不是NTFS格式,不是的要转到NTFS格式,如果是FAT32格式,划分出新的磁盘空间后,原磁盘会被格式化。
,千万注意!!!!实在不放心的话,就备份一下要划分的磁盘。
转换方法见/article/0eb457e57c08df03f1a905f0.html (2)不要划分系统盘,否则会引起原系统不稳定。
划分磁盘空间方法:/article/91f5db1bd31dec1c7f05e392.html第二步:假设大家都已经划分好了磁盘空间,下面就是安装LINUX系统-Ubuntu(1)现在已经出到Ubuntu14.04,但是安装起来不好安装,我用的是Ubuntu12.04,桌面版(desktop),下载时注意如多你的电脑是64位,则下载/precise/ubuntu-12.04-desktop-amd64.iso,如果是32位,则下载/precise/ubuntu-12.04-desktop-i386.iso (2)可以使用镜像工具打开镜像文件,从里面提取出 Wubi.exe 安装程序。
TinyOS学习笔记1-TinyOS安装1、Ubuntu系统的安装安装TinyOS可以在Windows中利用Cygwin进行安装,经过测试在XP中可以正确安装,但是安装的步骤过于麻烦,可以参考官方网站的安装步骤。
在Win7中安装后有问题,不能正确编译。
因此最好使用Linux系统来安装TinyOS,安装过程简单。
安装Ubuntu系统1.Ubuntu的官方网站下载iso镜像,我安装的是10.04版本2.可以有两种方式进行Ubuntu安装。
(1)传统方式安装:在系统中划分出空闲分区,利用U盘制作启动盘,官网有,可下载。
重启系统选择U盘启动。
进行安装。
(2)wubi方式进行安装:以文件形式进行安装,下载wubi,将镜像与wubi放于同一文件夹。
点击wubi进行安装。
3.更新Ubuntu更行Ubuntu时需要注意,更新时grub不更新。
利用wubi安装,我选择了更新grub,重新启动系统出现错误。
解决方法如下:1.另一台电脑,到Ubuntu网站下载镜像,安装到U盘中,制作启动盘。
2.开机,选择从U盘启动,在Boot里设置不好使,像我的ASUS A8,开机按ESC,选择U盘启动。
3.看到Ubuntu的欢迎界面,选择第一项,进入U盘中的Ubuntu系统。
4.在终端中,输入sudo apt-get install lilosudo lilo -M /dev/SD a mbr5.重启系统,问题解决4.使用root登录系统2、在Ubuntu系统下安装TinyOS我安装的时TinyOS2.1.1,安装过程参考TinOS官网的安装指导,但有问题,具体步骤如下:1)在系统的“/etc/apt/sources.list”中,添加如下代码:deb /tinyo ... lt;distribution> main<distribution>可以为(edgy,feisty,gutsy,hardy,jaunty,k ARM ic,lucid)例如 deb /tinyos/dists/ubuntu hardy main以上的源可能有问题,在安装是提示tinyos-2.1.1依赖的包找不到或无法安装,更新源如下解决此问题:deb /tinyos/dists/ubuntu hardy maindeb /tinyos oneiric main2)更新知识库,打开终端,输入sudo apt-get update3)安装TinyOSsudo apt-get install tinyos提示可选的tinyos的版本,选择最新的版本2.1.1sudo apt-get install tinyos-2.1.14)设置环境变量在~/.bashrc或者~/.profile中加入如下代码#Sourcing the tinyos environment variable setup scriptsource /opt/tinyos-2.1.1/tinyos.sh可用如下方法打开~/.bashrc或者~/.profilegedit ~/.bashrc添加成功后需要重新启动终端5)测试是否安装成功cd /opt/tinyos-2.1.1/apps/Blink/(若当前文件夹没有权限创建文件,将Blink复制到当前用户的目录进行运行)make telosb显示如下则安装成功:mkdir -p build/telosbcompiling BlinkAppC to a telosb binaryncc -obuild/telosb/main.exe -Os-O -mdisable-hwmul -fnesc-separator=__ -Wall -Wshadow -Wnesc-all-target=telosb -fnesc-cfile=build/telosb/app.c -board=-DDEFINED_TOS_AM_GROUP=0x22-DIDENT_APPNAME=/"BlinkAppC/"-DIDENT_USERNAME=/"root/"-DIDENT_HOSTNAME=/"ubuntu/"-DIDENT_USERHASH=0xa3473ba6L-DIDENT_TIMESTAMP=0x4c566efbL-DIDENT_UIDHASH=0xd972ea96L BlinkAppC.nc -lmcompiled BlinkAppC to build/telosb/main.exe2648 bytes in ROM54 bytes in RAMMSP430-objcopy --output-target=ihexbuild/telosb/main.exe build/telosb/main.ihexwriting TOS imageTinyOS学习笔记2-TinyOS的IDE-Yeti23.测试TinyOS中的Toosim∙make micaz sim∙提示找不到python2.5∙查看本机python的版本,我的版本为2.6∙进入/opt/tinyos-2.1.1/support/make/sim.extra∙修改python的版本PYTHON_VERSION=2.6∙重新make micazsim∙提示*** Successfullybuilt micaz TOSSIM library.则可运行tossim。
实验1TinyOS嵌入式开发环境的搭建与测试一.实验目的:1.搭建TinyOS嵌入式开发环境。
2.测试TinyOS开发环境。
3.通过测试例程熟悉TinyOS开发环境。
二.实验设备及软件环境:1.装载Ubuntu或Redhat系统的台式计算机或笔记本电脑;2.TelosB传感器节点;三、实验方法:1.搭建TinyOS嵌入式开发环境在Windows系统下安装虚拟操作系统软件VMware(版本8.0),并选择以下两种方式之一安装TinyOS:1)基于Redhat Linux操作系统和RPM软件包管理系统的手动安装方式在VMware软件新建虚拟机并安装RedHat Enterprise Linux4/RHEL4操作系统(或者其他版本的操作系统)。
相关安装方法参考此处。
2)基于Ubuntu操作系统和APT软件管理系统的自动安装方式在VMware软件新建虚拟机并安装Ubuntu14.04系统(或者其他更高版本的Ubuntu操作系统),在网络中搜索TinyOS的软件仓库,并将其添加至APT软件管理系统中,相关的添加方法参考此处。
此外可以参考官方安装教程中“Two-step install on your host OS with Debian packages”章节的内容。
2.测试TinyOS是否安装成功1)运行TinyOS自带的tos-check-env命令检查安装环境是否完全配置好。
2)利用TinyOS编译基于TOSSIM平台的BLINK例程以测试TinyOS能否正常使用。
必须完成以下步骤:理解Blink的程序结构和含义,相关内容参见附件1。
编译基于TOSSIM平台的BLINK程序,相关内容参见此处。
编写基于Python的仿真脚本和运行TOSSIM仿真实验,相关内容参见此处。
用于TOSSIM仿真及编译micaz的tinyos环境安装本人用的系统版本是ubuntu 14.04 LTS,安装的tinyos版本是tinyos-2.1.11.装jdk其实ubuntu默认的openjdk也行,不多说了。
2.装python和g++如果系统没有python开发环境和g++编译工具,需要执行下面的两条命令:sudo apt-get install python-devsudo apt-get install g++3.安装tinyos在/etc/apt/source.list中加入如下源网上查了很多,我用的是中间那一条,亲测可行,其他的我也注释后留下了,给大家选择#Add by ME#deb /tinyos/dists/ubuntu hardy main 网上的,但是不好用,所以注释掉了,下面这个可以用deb /tinyos/dists/ubuntu natty main#deb /tinyos karmic main 这一条源用于下载可编译telosb的tinyos刷新源sudo apt-get update安装tinyossudo apt-get install tinyos选择版本我用的是tinyos-2.1.1sudo apt-get install tinyos-2.1.1修改/opt/tinyos-2.1.1/tinyos.sh文件修改后文件内容如下:(其实只改一部分就可以,为了方便就全贴出来了)echo "Setting up for TinyOS 2.1.1"export TOSROOT=export TOSDIR=export MAKERULES=TOSROOT="/opt/tinyos-2.1.1"TOSDIR="$TOSROOT/tos"CLASSPATH=$CLASSPATH:$TOSROOT/support/sdk/java:$TOSROOT/support/sdk/java/tinyos.jar:.PYTHONPATH=.:$TOSROOT/support/sdk/python:$PYTHONPATHMAKERULES="$TOSROOT/support/make/Makerules"export TOSROOTexport TOSDIRexport CLASSPATHexport PYTHONPATHexport MAKERULES修改.bashrc文件进入/home/name(你的用户目录)下,修改.bashrc文件,添加加载tinyos环境变量的语句(进入当前用户下自动加载tinyos环境):source /opt/tinyos-2.1.1/tinyos.sh生成修改后的.bashrc文件:source .bashrcsudo tos-install-jni注意:如果提示类似“[:31:=:unexpected operator”错误,那么编辑/usr/bin/tos-install-jni,将文件中的第一行“#!/bin/sh”改为“#!/bin/bash”后,重新运行命令。
thinstation编译教程编译Thinstation是一个简单且方便的过程,允许您创建自己定制的瘦客户机操作系统。
以下是编译Thinstation的步骤:1. 确保您具备编译所需的系统环境。
Thinstation的编译器要求在Linux环境下运行,建议使用Ubuntu或Debian。
您可以在官方网站上找到详细的系统要求。
2. 下载Thinstation源代码。
您可以在官方网站上找到源代码的最新版本。
将源代码解压到您的工作目录中。
3. 根据您的需求进行配置。
进入源代码目录,找到名为"build.conf.sample"的文件,并将其复制为"build.conf"。
编辑"build.conf"文件,根据您的需求进行配置。
您可以指定要包含的软件包、图标、默认主题等。
4. 执行编译命令。
在终端中,进入源代码目录,运行命令"sudo make iso"开始编译过程。
该过程可能需要一些时间,具体取决于您的系统性能和所选择的组件数量。
5. 等待编译完成。
一旦编译过程完成,您将在源代码目录中找到生成的ISO映像文件。
这个映像文件就是您自定义的Thinstation操作系统。
6. 将ISO映像文件用于部署。
您可以将生成的ISO映像文件刻录到光盘上,或者使用虚拟机加载该映像文件。
将Thinstation操作系统安装到目标客户机上,根据您的需求进行配置。
以上是编译Thinstation的简要步骤。
您可以根据您的具体需求和技能水平进行进一步的定制。
请务必查阅官方文档以获取更详细的指导和支持。
编译自定义的瘦客户机操作系统能够为您提供最佳的轻量级桌面环境,以满足特定的业务需求。
1. 自己曾经有一个月都在关注安装问题,必须在WIN XP32位下安装,中英文都可以。
经过测试,在win vista和win7 64位(24G内存,必须用64位系统)下都失败了。
其实主要是cygwin的原因。
我使用的平台:The hardware platform is Intel i7 950 with 24G memory (对,你没看错,不是2G,也不是4G就是二十四G的内存).软件平台是Window 7 64bit 下挂VM模拟xp 32位,在xp 下挂Cygwin运行TinyOS 1.x.同时安装了双系统,也有ubuntu,但一直没安装成功。
手头没有64位的xp,所以其实给虚拟机我也只是分配3G内存,分多了也没有意义(可惜了我的24G内存和X58的主板啊!)。
我没有在4G以上的内存上运行过tinyos1.3,不知道在64位系统上,是否能有改观?或者tinyos1.x能不能支持64位?我正在学习使用ubuntu10.04 64bit 去运行 tinyos1.x,但安装是个问题:第一,没有教程在linux 64位系统下安装tinyos1.x第二,在linux 64位下安装java都很痛苦第三, Sourceforge的CVS登录不上去,非常的痛苦。
有解决了的同学请不吝赐教,谢谢!所以本blog当中,所有的实验,仿真,讨论都是基于xp 下Cygwin运行中TinyOS 1.x。
2. 安装完成以后必须设置Java的path和classpath。
Path 设置方法:在Path变量的“编辑系统变量”对话框中,在“变量值”文本框中先输入一个“;”,接着输入JDK bin目录的路径(这里假设是C:/Program Files/Java/jdk1.5.0_06/bin),然后单击“确定”按钮即可完成设置。
Classpath设置方法:有几个方法可以设置Classpath,最简单的方法是在系统变量中新增Classpath环境变量。
TinyOS在Windows中的安装必须是32位系统1.搭建Java环境JDK下载地址:/technetwork/java/javase/downloads/index.html JDK环境配置:(右击“我的电脑”-->"高级"-->"环境变量")1)在系统变量里新建JAVA_HOME变量,变量值为:C:\Program Files\Java\jdk1.6.0_14(根据自己的安装路径填写)2)新建CLASSPATH变量,变量值为:(不能漏掉最前面的点).;%JAVA_HOME%\lib;%JAVA_HOME%\lib\tools.jar3)在Path变量(已存在不用新建)添加变量值:%JAVA_HOME%\bin;%JAVA_HOME%\jre\bin(注意变量值之间用“;”隔开)4)“开始”-->“运行”-->cmd-->输入“javac”-->"Enter",如果能正常打印用法说明配置成功!2.安装Cygwin平台1.Cygwin下载地址:/share/link?shareid=504219&uk=37079853192.解压下载文件,双击Setup3.选择Install from Local Directory4.全部选择下一步,直至安装结束。
5.双击桌面Cygwin图标。
出现”These will never be overwrite”等文字时,说明安装完成。
6.将rpm拷到cygwin根目录下,运行cygwin,cd到rpm目录后输入以下命令:rpm–ivh–ignoreos–force –nodeps *.rpm7. 使用editplus编辑创建tinyos.sh于cygwin\etc\profile.d目录下,注意其中的jdk版本的修改。
8. 执行tos-install-jni命令如出现缺少*-32.dll文件错误时,需将c:\cygwin\lib\tinyosc:\Program Files\Java\jak1.6.0_10\jre\bin目录下的toscomm.dll重命名为toscomm-32.dll然后再执行tos-install-jni命令。
96
图2-22 TinyOS硬件抽象架构
2.6.4 TinyOS安装
安装TinyOS有两种方式,一种是使用光盘镜像,直接同时安装Linux和TinyOS(将TinyOS与Linux打包好,直接安装系统即可,使用Xubuntos操作系统);另一种是直接在现有的操作系统上进行安装,包括Windows和Linux。
本节主要介绍在Windows上安装TinyOS2.1的过程。
1.安装Java 1.6 JDK
从Java官方网站上下载Java 1.6 JDK,安装在D:\Program Files\Java(安装目录可任选)。
安装完成之后,配置环境变量。
(1)新建系统变量JA V A_HOME:指向JDK的安装路径,在该路径下找到bin、lib等目录,JA V A_HOME=D:\Program Files\Java\jdk1.6.0_
10。
(2)在系统变量中找到Path:将%JA V A_HOME%\bin;%JA V A_HOME%\jre\bin;添加到最前面即可。
(3)新建系统变量CLASSPATH:
设置类的路径
CLASSPATH=.;%JA V A_HOME%\jre\lib\rt.jar;%JA V A_HOME%\lib\tools.jar;%JA V A_HOM
E%\lib\dt.jar。
至此安装过程结束,可以自行编写一个测试程序。
在D盘根目录下新建文件夹javatest,然后创建文本文件,将下面的代码拷入并保存成Test.java文件,注意文件名要与类名相一致。
public class Test。
将Tinyos2.x移植到cc2530
编译环境的搭建
流程:在windows下建立cygwin平台,并搭建Tinyos的编译环境,然后将基于Tinyos的应用程序编译成hex文件,通过仿真器下载到cc2530片子上运行。
原材料:硬件(cc2530节点,仿真器等)、软件(Cygwin,Keil,TinyOS 2.x,编译环境配置软件包,SmartRF04 Flash Programer等)。
注意:硬件是原来在IAR下能正常使用的CC2530开发硬件就OK声明:一.里面很多东西我借鉴了网上的资料,并写在后面的参考文献中。
并对一些内容进行了修改和强调,以及我遇到的一些问题的解决方法。
= = = = = = = = = = = = = = = = = = = = = =
1.安装Keil (Keil uVersion4)
这些资源网上很多,百度和谷歌都可以搜到(注:一定要下载keil uVersion4,不可以下载4以下的版本,因为要运行的是cc2530,4以下的版本会找不到相关的编译平台环境)
2.安装java 1.5 JDK
我开始用1.6了的,反正一直没成功,不知道是不是这个原因。
最好就用1.5这个版本吧。
安装完了在命令行中:java –verson ,出现“java version “1.5.0”表示是1.5版本了。
3.安装Cygwin
(1)下载Cygwin,我是在这里下载的:/index.php/Installing_TinyOS_2.0.2#Manual_installation_on_your_host_OS_with_RPMs,在Setp 2: Install Cygwin中第一步有个cygwin-files.zip,点击即可下载。
这个地址好像也可以下载:rmatik.uni-freiburg.de/people/aslam/cygwin-files.zip
(2)安装时先解压下载的cygwin,点击setup.exe即可,默认安装在c盘下。
选项基本上不用变,都是默认选项:”install from Local Directory”->Root Directory: c:\cygwin, Install for: All Users, Default Text file type: Unix/Binary->当问到”Select local Package directory”时,选择自己解压的cygwin目录即可,如:“D:/cygwin-files”,最后等一会时间即可完成安装。
(3)启动桌面上的Cygwin快捷图标,cygwin第一次运行会设置一些东西,并创建一个home目录,里面创建了一个用户,名为windows系统的用户名。
注意:此时自己在cygwi菜单n根目录下创建一个opt目录,后面会用到。
(如果你安装cygwin后有这个目录就不同了,反正我安装后没有这个目录,后面的操作会在这个目录下自动放置一些文件)
4.下载Tinyos开发必备的编译工具的安装包(共4个)
NesC编译工具:nesc-1.3.0-1.cygwin.i386.rpm
TinyOS相关工具:
tinyos-deputy-1.1-1.cygwin.i386.rpm
tinyos-tools-1.3.0-1.cygwin.i386.rpm
tinyos-2.1.0-2.cygwin.noarch.rpm
这些东西在这里能够找到(呵呵):/dist-2.1.0/tinyos/windows/
5.安装上面的rpm包
(1)在/home目录下是你的主目录,我的是.Adminstrator将刚才的那4个rpm包拷贝到\home\Adminstrator下(即C:\Cygwin\home\john下),进入到该目录:cd /home/Adminstrator,ls一下可以看见这4个文件。
(2)安装rpm包
rpm -ivh nesc-1.3.0-1.cygwin.i386.rpm
rpm -ivh tinyos-tools-1.3.0-1.cygwin.i386.rpm
rpm -ivh tinyos-deputy-1.1-1.cygwin.i386.rpm
rpm -ivh tinyos-2.1.0-2.cygwin.noarch.rpm
每输入一次回车一下就可以了。
6.安装Tinyos 2题.x
(1)将下载的Tinyos文件“TinyOS8051wg-0.1pre4.tgz”放到/opt目录下。
注意检查此时该目录下应该有一个叫“tinyos-2.x”的目录,如果没有前面做的有问题,而且后面的操作几乎肯定会出错。
(注:TinyOS8051wg-0.1pre4.tgz 在/可以找到下载资源)
PS:这个文件夹下放置了一些编译规则文件,如:\opt\tinyos-2.x\support\make\Makerules文件。
(2)解压“TinyOS8051wg-0.1pre4.tgz”文件
tar –xvzf TinyOS8051wg-0.1pre4.tgz ,有些文章说用winrar就可以,反正我每次这么做的时候最后都会报错,最好用前面这个tar命令。
最后在/opt下生成一个“tinyos-2.x-contrib”目录
(3)设置编译环境
cd tinyos-2.x-contrib
ls (出现一个diku文件夹)
source diku/env
说明:diku文件夹下面有个env配置文件,我们通过source 命令加载下,这样后面编译的时候编译器就知道我们要使用什么样的配置去编译了。
注意:每次重新启动cygwin后如果要编译,需要运行此命令(source /opt/tinyos-2.x-contrib/diku/env)(4)编译工程文件(以BlinkNoTimerTask为例)
cd /diku/common/apps/BlinkNoTimerTask
make cc2430em
可能出现下面错误:
cd build/cc2430em && ./startup.bat
/bin/sh: ./startup.bat: Permission denied
意思是权限不够,又不知道如何在cygwin下以超级用户登录(网上说用login命令,我试了不怎么好使)。
我的解决办法是:进入到cc2430em目录下,chmod 777 startup.bat,然后重新编译,反正就好用了,呵呵。
我最后的结果截图如下:
最后在cc2430em下生成了app.hex文件,如图:
7.烧写
(1)下载并安装SmartRF04 Flash Programmer这个软件,我用的是Setup_SmartRF04Progr_1.3.0.exe 这个版本(同时我把还安装了Setup_Packet_Sniffer_2_2_0_0.exe和Setup_SmartRF_Studio_6_5_1.exe这两个软件,是芯片和仿真器驱动,不知道是不是多于了)。
(2)电脑USB跟仿真器连接,仿真器跟芯片连接好后,提示安装驱动,自动安装好后即可以用了。
(3)打开chipcon下的SmartRF04 Flash Programer,设置如下:
注意用System-on-Chip => Flash iage选择刚才编译好的app.hex文件=> 点击Read IEEE, 然后Write IEEE => 勾选Retain IEEE address when reprogramming => Action中选择第二个Erase,program and v… =>最后点击Perform actions,出现Erase,program and verify OK。
表示成功了,而且此时芯片上的一个小灯在不停的快速闪烁。