分布式全相参雷达系统时间与相位同步方案研究
- 格式:docx
- 大小:42.40 KB
- 文档页数:11
分布式雷达相参发射原理与性能分析佚名【摘要】通过调整空间距离较远的雷达发射天线的发射时间和初始相位可控制电磁波能量在空间的分布来增强感兴趣空间区域的信号能量。
该文分析分布式雷达相参发射的原理,给出形成干涉峰点的条件,定义空间干涉能量分布函数来反映发射信号能量较平均能量的增益,其最大值为发射天线个数。
在远场和近场条件下分析信号空间能量分布的特点,表明它在远场近天线距离呈条纹状,在近场远天线距离呈类晶体结构或独峰结构。
为了让目标在干涉峰点内部,分布式相参发射在低频率、小目标的跟踪状态更有效。
%By adjusting the transmitting time and theinitial phase of distributed radar antennas, the spatial distribution of signal energy transmission can be controlled and then the signal energy can be improved in the spatial region of interest. The fundamentals of distributed coherent transmitting are analyzed, the conditions are presented to forman interference peak, and a spatial interference energy distribution function is defined to represent the gain of the transmitting energy compared to the mean energy, which has a maximum of the number of transmitting antennas. The characteristic of the spatial interference energy distribution function is analyzed in both radar near field and radar far field, indicating that the spatial interference energy distribution function exhibits a stripe shape in radar far field with collocated antennas, and an ellipse shape or a mono-peak shape in radar near field with widely separated antennas. To make a real target contained in a signal interference peak,the distributed coherent transmission works better for lower frequencies and smaller targets in the target tracking mode.【期刊名称】《电子与信息学报》【年(卷),期】2015(000)008【总页数】7页(P1801-1807)【关键词】分布式雷达;分布式相参发射;空间干涉能量分布函数;干涉峰点【正文语种】中文【中图分类】TN957分布式雷达通常发射相互独立的信号[4,5],以使得雷达接收机能区分不同雷达站发射信号对应的回波信号,此时常假设不同雷达站对应的目标回波信号相互独立[2,6],因此很难对回波信号进行相干积累,故而这种分布式雷达通常是非相参方式工作的[7]。
总第265期舰船电子工程Vol. 36 No. 7 2016 年第7 期Ship Electronic Engineering 73远程分布式雷达时间同步的实现胡诗(武汉藏龙北路1号武汉430205)摘要讨论了现代相参雷达对时间同步的需求,提出种基于高稳定时钟和G P S秒脉冲相结合的远程分布式雷 达时间同步的方法及能达到的性能,该方法既保证了系统长期时间稳定度,又避免了因G P S秒脉冲精度不够带来的短期稳 定度较低的问题,工程实现上具有易实现、可靠稳定的特点,为远程分布式雷达时间同步的设计提供了设计思路。
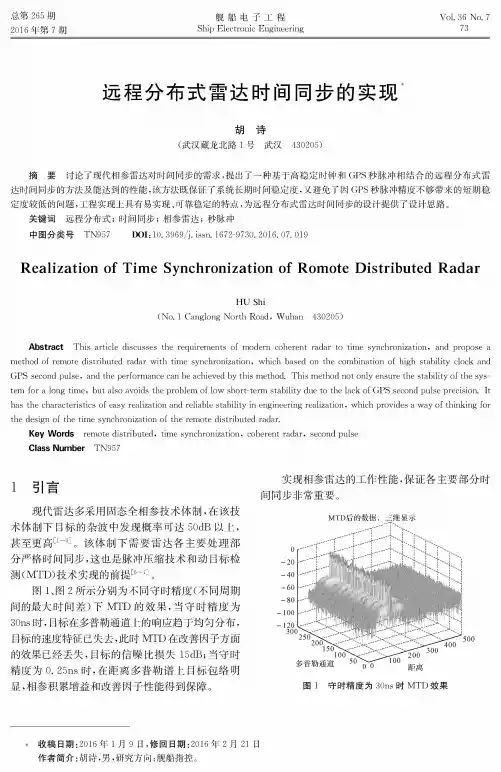
关键词远程分布式I时间同步;相参雷达;秒脉冲中图分类号TN957 D O I:10. 3969/j. issn. 1672-9730. 2016. 07. 019Realization of Time Synchronization of Romote Distributed RadarH U S h i(No. 1 Canglong N orth Road, W uhan 430205)Abstract T his article discusses the requirem ents of m odern coherent radar to tim e synchronization, and propose a m ethod of rem ote distributed radar w ith time synchronization, which based on the combination of high stability clock and G PS second pulse^ and the perform ance can be achieved by this method. T his m ethod not only ensure the stability of the system for a long tim e, but also avoids the problem of low short-term stability due to the lack of G PS second pulse precision. It has the characteristics of easy realization and reliable stability in engineering realization, which provides a way of thinking for the design of the time synchronization of the rem ote distributed radar.Key Words rem ote distributed, time synchronization, coherent radar, second pulseClass Number TN9571引言实现相参雷达的工作性能,保证各主要部分时间同步非常重要。
高精度时间同步算法在分布式系统中的应用研究在分布式系统中,时间同步是一个关键的问题。
分布式系统中的各个节点分布在不同的地理位置,通过网络进行通信和协作,因此需要保证各个节点之间的时间一致性,以保证分布式系统的正常运行。
而高精度时间同步算法则致力于提供更加准确的时间同步解决方案,以满足分布式系统中对时间要求更高的应用场景。
在分布式系统中,时间同步的需求来自于多个方面。
首先,在分布式存储系统中,准确的时间戳用于记录数据的创建、修改和访问时间,以保证数据的一致性和可追溯性。
其次,在分布式数据库中,对于事务的顺序执行和一致性写入要求准确的时间戳。
再次,在分布式计算中,需要对任务的执行顺序和结果进行排序和比较,而准确的时间同步是实现这一目标的基础。
此外,在分布式系统中进行分布式锁、共识算法等协议时,也需要准确的时间同步。
传统的时间同步算法,如NTP(Network Time Protocol)和PTP(Precision Time Protocol),已经在分布式系统中得到广泛应用。
然而,这些算法在高精度时间同步的需求下可能无法满足。
因此,研究人员提出了一系列高精度时间同步算法,例如White Rabbit、FTSP(Flooding Time Synchronization Protocol)和RBS (Reference Broadcast Synchronization)等。
其中,White Rabbit是一种基于以太网的高精度时间同步方案。
它借助硬件级别的时间同步设备,通过精确控制数据包的发送和接收时刻,实现微秒级的时间同步精度。
White Rabbit在大型科学设施和分布式控制系统中得到了广泛应用。
但是,由于其硬件设备的成本较高,限制了其在一些商业应用中的推广和应用。
另一个高精度时间同步算法是FTSP,它是一种基于无线通信的时间同步方案。
FTSP通过向相邻节点广播时间信息进行同步,然后通过时序比较和线性回归等技术来提高时间同步的精度。
机载分布式相参雷达同步参数估计理论和方法研究机载分布式相参雷达同步参数估计理论和方法研究摘要:相参雷达是一种能够实现高分辨力目标成像的先进雷达技术,而分布式相参雷达在工作时存在着系统同步参数的估计问题。
本文针对这一问题,对机载分布式相参雷达同步参数的理论与方法进行了研究。
1. 引言相参雷达是一种利用连续波和脉冲波相互干涉的雷达技术,其具有高分辨力、抗干扰能力强等优点,因此在目标成像和探测中得到了广泛应用。
分布式相参雷达是将相参雷达分布在不同位置的多个节点上,通过相互通信进行同步,从而实现对广域目标的高精度成像。
然而,在实际工作中,分布式相参雷达的同步问题一直是一个挑战,而机载分布式相参雷达由于工作环境的复杂性,同步问题更加严峻。
2. 同步参数估计理论同步参数估计理论是解决机载分布式相参雷达同步问题的关键。
首先,需要根据分布式相参雷达的工作原理,建立系统同步误差模型。
基于该模型,可以利用最小二乘法、卡尔曼滤波等方法,通过测量数据对同步参数进行估计。
同时,为了提高估计的准确性,还可以采用分布式一致性算法,通过相邻节点之间的通信和信息融合,实现对同步参数的更精确估计。
3. 同步参数估计方法针对机载分布式相参雷达同步参数估计的方法,本文提出了一种基于时钟信号和测量数据的联合估计方法。
首先,在各个节点上使用精密的高稳定度时钟源生成时钟信号,并通过通信链路进行相互同步。
然后,每个节点利用自身的时钟信号和测量数据,通过最小二乘法进行同步参数的估计。
最后,通过分布式一致性算法,实现相邻节点之间的信息融合和参数优化,提高同步参数估计的准确性。
4. 仿真实验与结果分析为验证所提方法的有效性,通过进行仿真实验进行验证。
实验中,设置了不同的初始同步参数误差和测量噪声,并对比了提出方法与传统方法的同步性能。
实验结果表明,所提方法在不同工况下都能够较好地估计同步参数,实现高精度的目标成像。
5. 结论本文对机载分布式相参雷达同步参数估计理论和方法进行了研究,并提出了一种基于时钟信号和测量数据的联合估计方法。
远程分布式雷达时间同步的实现1. 引言- 研究背景及意义- 相关研究综述- 本文研究的内容和目标2. 远程分布式雷达的时间同步- 远程分布式雷达系统的概述- 时间同步的重要性和挑战- 常见的时间同步方法3. 基于GPS的时间同步方法- GPS时间同步原理- GPS信号的接收和处理- GPS同步算法的设计和实现4. 基于网络的时间同步方法- 网络同步的基本原理- 时钟同步协议的分类和介绍- 基于NTP的时间同步方法的实现与优化5. 系统设计与实验结果- 远程分布式雷达时间同步系统的设计与实现 - 实验环境和实验结果分析- 系统的优化与改进6. 总结与展望- 对本文研究的总结与评价- 对未来远程分布式雷达时间同步研究的展望和建议第1章节:引言研究背景及意义:随着雷达技术的发展和应用领域的不断拓展,对雷达系统的性能要求也越来越高。
在现代雷达系统中,时间同步是一个非常重要的问题。
时间同步指的是在多个雷达间保持时间的一致性,以保证雷达系统的协同和定位的准确性。
远程分布式雷达系统由于软硬件分布在不同的地点,其时间同步问题比单一雷达系统更为复杂和困难。
因此,研究远程分布式雷达时间同步的算法和实现方法具有重要的研究意义和实际应用价值。
相关研究综述:在时间同步领域,已有多种实现方法,例如GPS同步、局域网同步、网络同步等。
其中,GPS同步一直是相对可靠和精度较高的同步方法,但对于一些地理位置较偏远的雷达站点来说,GPS信号可能存在接收困难的问题。
后来的研究主要是从网络同步的角度出发,设计和优化同步算法,以提高时间同步的精度和可靠性。
目前常用的同步协议有NTP、PTP等。
本文研究的内容和目标:本文主要研究远程分布式雷达时间同步的算法和实现方法。
首先,对远程分布式雷达系统的概述进行详细介绍,重点分析时间同步的重要性和挑战。
其次,针对时间同步问题,本文将实现两种主要的同步方法,分别是基于GPS的同步和基于网络的同步。
在设计和实现阶段,我们将详细介绍算法的设计思路和实现过程,并对结果进行实验和分析。

对分布式MIMO 雷达的时间同步干扰方法∗李昱龙;熊英【摘要】分布式 MIMO 雷达各站大间距分布式布站,带来了时间同步性的问题。
分析了分布式 MI-MO雷达基于导航卫星的时间同步模型的工作原理,并对分布式 MIMO 雷达的信号模型和目标定位数学模型进行了推导。
针对分布式 MIMO 雷达时间同步问题,通过干扰机对分布式 MIMO 雷达的导航卫星信号实施转发欺骗延时干扰,使各雷达子站时间上产生误差,从而使分布式 MIMO 雷达的观测通道的延时增大或者减小,造成分布式 MIMO 雷达目标定位误差。
最后仿真从分布式 MIMO 雷达的目标定位精度上分析了该方法的干扰效果,结果证明了该方法的有效性。
%MIMO radar with widely separated antennas needs time synchronization.The working princi-ple of its satellite-based navigation time synchronization model is analyzed.The signal model and the target locating mathematical model are also deduced.In view of the time synchronization,the jammer retransmits radar’s satellite navigation signal to make time synchronization errors.Then the time delay of MIMO radar with widely separated antennas is increased or decreased.Finally,the simulation analysis of the jamming effect of this method on the target locating precision of MIMO radar is made.The results show the effective-ness of the proposed method.【期刊名称】《雷达科学与技术》【年(卷),期】2015(000)001【总页数】5页(P51-54,59)【关键词】分布式MIMO雷达;时间同步;目标定位;欺骗干扰【作者】李昱龙;熊英【作者单位】电子科技大学电子工程学院,四川成都 611731;电子科技大学电子工程学院,四川成都 611731【正文语种】中文【中图分类】TN974;TN9580 引言随着战场电磁环境的复杂化,传统雷达体制得到不断发展。
基于频率步进的宽带分布式全相参雷达
殷丕磊;闫路;张宗傲;杨小鹏;曾涛
【期刊名称】《北京理工大学学报》
【年(卷),期】2016(36)7
【摘要】系统时间同步是宽带分布式全相参雷达的核心问题之一,但现有的时间同步技术无法满足其同步精度需求.本研究基于频率步进信号提出了一种宽带分布式全相参雷达时间同步方法.分析了时间同步误差对系统相参性能的影响;提出了采用频率步进信号代替线性调频信号的时间同步方法.理论分析表明,该方法能够极大地减小时间同步误差对相参性能的影响,进而降低对时间同步精度的需求;通过仿真分析验证了本方法的有效性.
【总页数】6页(P749-754)
【关键词】分布式全相参;步进频;时间同步误差;宽带
【作者】殷丕磊;闫路;张宗傲;杨小鹏;曾涛
【作者单位】北京理工大学信息与电子学院
【正文语种】中文
【中图分类】TN957.2
【相关文献】
1.分布式全相参雷达相参性能分析 [J], 宋靖;张剑云
2.基于相关法的分布式全相参雷达相干参数估计及相参性能 [J], 宋靖;周青松;张剑云
3.基于MUS IC法的宽带分布式全相参雷达相参参数估计方法 [J], 张洪纲;雷子健;刘泉华
4.基于相位同步的分布式全相参雷达参数估计及相参性能 [J], 宋靖; 张剑云; 代林; 郑志东
5.基于Kalman滤波的分布式全相参雷达相参参数估计方法 [J], 殷丕磊;张洪纲;翟腾普;祁海明;刘泉华;曾涛
因版权原因,仅展示原文概要,查看原文内容请购买。
分布式相参雷达相参效率及相参景深研究
王元昊;王宏强;刘兴华;曾旸;杨琪
【期刊名称】《系统工程与电子技术》
【年(卷),期】2024(46)5
【摘要】分布式相参雷达(distributed coherent aperture radar,DCAR)所发射信号仅能在感兴趣点处完全相参叠加,在一定发射相参效率约束下,因相参位置失配会出现能量弥散现象。
对此,定义“相参景深”用以描述该能量弥散现象,并给出相参景深形成原因,指出其有界性和周期性特征,分析其影响因素,以具象化和定量化的方式揭示发射相参效率空间分布规律,可有效支撑DCAR发射信号参数和阵列构型选择等工程实践。
最后,以多节点单元雷达的DCAR设计仿真实验,证明了所提方法的有效性。
【总页数】10页(P1573-1582)
【作者】王元昊;王宏强;刘兴华;曾旸;杨琪
【作者单位】国防科技大学电子科学学院;军事科学院军事科学信息研究中心;电子信息系统复杂电磁环境效应国家重点实验室
【正文语种】中文
【中图分类】TN957.3
【相关文献】
1.分布式相参雷达两种相参参数估计算法的性能比较
2.基于信号重建的分布式相参雷达相参参数估计算法
3.分布式相参雷达多脉冲积累相参参数估计方法
4.基于Kalman滤波的分布式全相参雷达相参参数估计方法
因版权原因,仅展示原文概要,查看原文内容请购买。
分布式全相参雷达系统时间与相位同步方案研究曾涛;殷丕磊;杨小鹏;范华剑【摘要】分布式全相参雷达是一种新体制雷达,它解决了大口径雷达难以机动部署、造价昂贵等问题,是下一代雷达的发展方向,目前实现分布式全相参雷达所面临的关键技术问题是时间同步和相位同步。
对此,该文分析了时间同步误差和相位同步误差的来源,建立了相应的数学模型,仿真了同步误差对相参性能的影响,给出了时间同步误差及相位同步误差的指标要求。
并基于有线传输的非相关传输方式提出了时间同步方案,基于定标的方式提出了相位同步方案,以分别实现分布式全相参雷达的时间同步和相位同步。
该文所提出的分布式全相参雷达同步方案,对于这一新体制雷达的实现具有一定的指导意义。
% As a new radar technology, the distributed aperture coherent radar is expected to be the next generation radar, which is easier to transport and less expensive than the traditional large aperture radar. However, the time synchronization and phase synchronization are key issues to be addressed for the distributed aperture coherent radar. In this paper, the error sources of time synchronization and phase synchronization are analyzed, and the corresponding mathematical models are first derived. Then, the impact of synchronization errors on the coherent performance is simulated, and the accuracy of time and phase synchronization is presented based on the simulation results. Finally, the noncorrelation transmission scheme and the calibration scheme based on the wired transmission are proposed to realize the time and phase synchronization, respectively. Research of thesynchronization problem could be very helpful to realize the new radar technology of distributed aperture coherent radar.【期刊名称】《雷达学报》【年(卷),期】2013(000)001【总页数】6页(P105-110)【关键词】分布式;全相参;同步;定标【作者】曾涛;殷丕磊;杨小鹏;范华剑【作者单位】北京理工大学信息与电子学院北京 100081;北京理工大学信息与电子学院北京 100081;北京理工大学信息与电子学院北京 100081;北京理工大学信息与电子学院北京 100081【正文语种】中文【中图分类】TN957随着人们对雷达探测威力及探测精度要求的不断提高,由此产生了一批大口径雷达,例如美国的SBX雷达,其雷达的天线口径达22.1米,系统总重量5万吨。
如此庞大的雷达系统倘若布置在陆地上则难以机动部署,因此无法满足战时对雷达机动部署能力的要求。
同时,大口径雷达还具有造价成本高,对器件的工艺要求高等缺点。
因此,为了克服大孔径雷达的这些固有缺点,美国林肯实验室在2003年提出了分布式孔径全相参雷达的概念[1]:将多个雷达或阵列分散布设,通过对多部雷达的回波进行信号层次的融合,达到大孔径雷达的性能[2,3]。
一个由N部单元雷达构成的分布式全相参雷达,相对于单部雷达而言,其最大输出信噪比可以提高N3倍[4,5]。
分布式全相参雷达相对于常规大口径雷达而言,由于其单元雷达天线口径的减小,因而更容易实现机动部署。
同时,还降低了雷达成本以及对器件的工艺复杂度和精度的要求等[6,7]。
然而,就系统的实现而言,相比于单基地雷达,分布式全相参雷达首当其冲的技术难点就是各单元雷达之间的时间、空间和相位的同步,本文主要讨论时间和相位的同步问题。
关于双(多)基地雷达的时间及相位同步方法已有较多的研究,最常用的是三大类方法:间接同步法、直接同步法和独立式同步法[8]。
这些同步方法均能满足双(多)基地雷达的测距同步要求。
然而,由于分布式全相参雷达要求各单元雷达的信号需要满足时间和相位的相参性,因此对时间及相位的同步精度要求非常高,双(多)基地雷达的基于无线电信号的同步方法不能直接应用于分布式雷达系统中。
相对于双(多)基地雷达,在分布式全相参雷达系统中各单元雷达的间距较近,结合系统的这一结构特点,我们提出了一种基于有线传输的方式来分别实现时间和相位的同步。
本文首先分析了分布式全相参雷达系统的同步误差来源,建立了时间同步误差和相位同步误差的数学模型,提出了通过中心站向各单元雷达分发信号的方式来构成各单元雷达的本振信号,从而消除了晶振频率准确度及稳定度对同步误差的影响,减少了同步误差的来源。
本文仿真了同步误差对相参性能的影响,给出了在分布式全相参雷达系统中对时间同步误差及相位同步误差的指标要求。
文中基于有线传输的非相关传输方式提出了时间同步方案,基于定标的方式提出了相位同步方案,以分别实现分布式全相参雷达的时间同步和相位同步。
在分布式全相参雷达系统中,两个单元雷达均有自己独立的本振系统,受晶振频率准确度及频率稳定度的影响,两个单元雷达的本振频率会存在不一致误差,可表示为式中,为两晶振的频率准确度的差值,为两晶振的频率稳定度的差值。
因此,随着工作时间的增长,由于两个单元雷达的频率不一致所引起的时间同步误差及相位同步误差将逐渐增大,即式中,为晶振的标称频率,,分别为两单元雷达的初始时钟差、两本振信号的初始相位差,分别为噪声引起的两单元雷达的随机时间差和随机相位差。
逐渐增大的同步误差将影响分布式雷达的相参性能,必须予以控制。
因此,为消除时间因素对同步误差的影响,对单元雷达的本振系统构成,我们提出如下同源本振构成方案:在中心站设置一个高稳时钟,该时钟可以是原子钟或者高稳石英晶体振荡器,高稳时钟信号经过光纤向两单元雷达分发,在两单元雷达分别对接收信号进行倍频、分频、锁相,从而构成两单元雷达的本振信号。
如图1所示。
利用上述同源本振构成方案,我们消除了晶振频率准确度和频率稳定度对同步误差所带来的影响,因此两单元雷达的同步误差将仅由初始时钟差及初始相位差决定,若忽略掉噪声的影响,则式(2)、式(3)简化为在分布式全相参雷达中,需要对相参参数(两单元雷达与目标的时延差及其相应的相位差)进行估计,从而利用相参参数估计值对两单元雷达发射信号的时间和相位进行调整,以实现两发射信号在目标处同时同相叠加,完成发射相参;然后对两单元雷达的接收信号进行时延和相位的调整,以实现接收相参,从而完成整个系统的全相参工作。
然而,当两单元雷达存在时间同步误差时,会导致时间差估计值存在2偏差,从而造成两单元雷达接收回波的时间不一致。
因此,若忽略掉其他因素的影响,当两单元雷达仅存在时间同步误差时,则两单元雷达的回波信号经匹配滤波后,可分别设为式中,为复数,分别表示目标在不同方向的散射强度,为脉压后脉冲宽度,为两单元雷达的时间同步误差。
两信号的叠加输出为如果,则两信号叠加后能量最大,否则,叠加后会存在能量损失。
定义由时间同步误差所引起的能量损失比[9]为类似的,考虑相位同步误差的影响。
当两单元雷达存在相位同步误差时,会导致相位差估计值存在2的偏差[10],从而造成两单元雷达的接收回波相位不一致。
因此,当两单元雷达仅存在相位同步误差而不考虑其他误差时,则两单元雷达的回波经过匹配滤波后,可分别设为两信号的叠加输出为如果,则两信号叠加后能量最大,否则,叠加后有能量损失。
定义由相位同步误差所引起的能量损失比[9]为设,图2和图3分别给出了时间同步误差以及相位同步误差所引起的能量损失比的仿真结果。
从以上仿真可以看出,能量损失比随时间同步误差和相位同步误差的增大而增大。
若要求分布式全相参雷达的能量损失比小于0.3 dB,则应有:(1) 时间同步误差应小于0.16t(t为脉压后的脉冲宽度);(2) 相位同步误差应小于。
从以上分析可以看出,分布式全相参雷达对于时间同步误差及相位同步误差的要求非常苛刻,因此,需要设计分布式全相参雷达的时间及相位的同步方案。
目前现有的同步方法,按信号的传输方式来分,可以分为无线电信号法与有线通信法两大类。
相对于无线电信号同步方法而言,有线通信同步法具有精度高、稳定性好、实时性好、系统使用简单等优点。
同时,有线通信还无需考虑保密性、安全性、电磁干扰等其他诸多因素[11]。
因此,基于有线通信方式,我们提出非相关传输[12]的时间同步方案以及基于定标[13,14]的相位同步方案。
为实现分布式全相参雷达的时间同步,我们提出采用有线非相关传输的方法来估计时间同步误差,然后对两单元雷达的发射信号进行时延补偿,从而实现两单元雷达的时间同步。
两单元雷达通过光纤连接,有线非相关传输方法的示意图如图4所示。
其工作过程为:首先,单元雷达1向单元雷达2发射同步信号,经过光纤通道传输到单元雷达2,在单元雷达2的计数器得到传输时间。
然后,单元雷达2向单元雷达1发射同步信号,经过同一段光纤通道传输到单元雷达1,在单元雷达1的计数器得到传输时间,其时间关系如图5所示。
图中,分别为单元雷达1和单元雷达2的触发时刻,为两单元雷达的时间同步误差;为光纤线路的传输时延;表示单元雷达2接收到单元雷达1发射信号的时刻,表示单元雷达1接收到单元雷达2发射信号的时刻;表示单元雷达1的发射通道延时与单元雷达2的接收通道延时之和,表示单元雷达2的发射通道延时与单元雷达1的接收通道延时之和,二者均可通过标称测得。
在单元雷达1处测得的信号传输时间为在单元雷达2处测得的信号传输时间为因此可得两单元雷达的时间同步误差的估计值为利用我们所得到的时间同步误差估计值,对两单元雷达的发射信号进行时延补偿,即可实现两单元雷达的时间同步。