数值计算方法( 三次样条插值)
- 格式:ppt
- 大小:2.15 MB
- 文档页数:69
三次样条插值分段线性插值的优点:计算简单、稳定性好、收敛性有保证且易在计算机上实现缺点:它只能保证各小段曲线在连接点的连续性,却无法保证整条曲线的光滑性,这就不能满足某些工程技术的要求。
三次Hermit 插值优点:有较好的光滑性,缺点:要求节点的一阶导数已知。
从20世纪60年代开始,首先由于航空、造船等工程设计的需要而发展起来所谓样条(Spline)插值方法,既保留了分段低次插值多项式的各种优点,又提高了插值函数的光滑性。
今天,样条插值方法已成为数值逼近的一个极其重要的分支,在许多领域里得到越来越多广泛应用。
我们介绍应用最广的具二阶连续导数的三次样条插值函数。
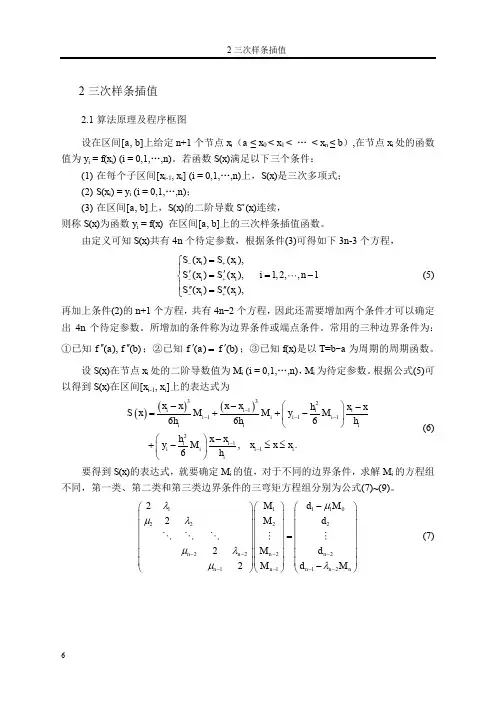
一、三次样条插值函数的定义:给定区间],[b a 上的个节点b x x x a n =<<<= 10和这些点上的函数值),,1,0()(n i y x f i i == 若)(x S 满足: (1)),,2,1,0()(n i y x S i i ==;(2)在每个小区间],[b a 上至多是一个三次多项式; (3))(),(),(x S x S x S '''在],[b a 上连续。
则称)(x S 为函数)(x f 关于节点的n x x x ,,,10 三次样条插值函数。
二、边界问题的提出与类型单靠一个函数表是不能完全构造出一个三次样条插值函数。
我们分析一下其条件个数,条件(2)三次样条插值函数)(x S 是一个分段三次多项式,若用)(x S i 表示它在第i 个子区间],[1i i x x -上的表达式,则)(x S i 形如],[,)(1332210i i i i i i i x x x x a x a x a a x S -∈+++=其中有四个待定系数)3,2,1,0(=j a ij ,子区间共有n 个,所以)(x S 共有n 4个待定系数。
由条件(3))(),(),(x S x S x S '''在],[b a 上连续,即它们在各个子区间上的连接点110,,,-n x x x 上连续即可,共有)1(4-n 个条件,即⎪⎪⎩⎪⎪⎨⎧==-=+''=-''-=+'=-'-=+=-),2,1,0()()1,,2,1)(0()0()1,,2,1)(0()0()1,,2,1)(0()0(n i y x S n i x S x S n i x S x S n i x S x S i i i i i i i i 共有241)1(3-=++-n n n 个条件,未知量的个数是n 4个。
/* 三次样条插值计算算法*/#include "math.h "#include "stdio.h "#include "stdlib.h "/*N:已知节点数N+1R:欲求插值点数R+1x,y为给定函数f(x)的节点值{x(i)} (x(i) <x(i+1)) ,以及相应的函数值{f(i)} 0 <=i <=NP0=f(x0)的二阶导数;Pn=f(xn)的二阶导数u:存插值点{u(i)} 0 <=i <=R求得的结果s(ui)放入s[R+1] 0 <=i <=R返回0表示成功,1表示失败*/int SPL(int N,int R,double x[],double y[],double P0,double Pn,double u[],double s[]){/*声明局部变量*/double *h; /*存放步长:{hi} 0 <=i <=N-1 */double *a; /*存放系数矩阵{ai} 1 <=i <=N ;分量0没有利用*/ double *c; /*先存放系数矩阵{ci} 后存放{Bi} 0 <=i <=N-1 */double *g; /*先存放方程组右端项{gi} 后存放求解中间结果{yi} 0 <=i <=N */double *af; /*存放系数矩阵{a(f)i} 1 <=i <=N ;*/double *ba; /*存放中间结果0 <=i <=N-1*/double *m; /*存放方程组的解{m(i)} 0 <=i <=N ;*/int i,k;double p1,p2,p3,p4;/*分配空间*/if(!(h=(double*)malloc(N*sizeof(double)))) exit(1);if(!(a=(double*)malloc((N+1)*sizeof(double)))) exit(1);if(!(c=(double*)malloc(N*sizeof(double)))) exit(1);if(!(g=(double*)malloc((N+1)*sizeof(double)))) exit(1);if(!(af=(double*)malloc((N+1)*sizeof(double)))) exit(1);if(!(ba=(double*)malloc((N)*sizeof(double)))) exit(1);if(!(m=(double*)malloc((N+1)*sizeof(double)))) exit(1);/*第一步:计算方程组的系数*/for(k=0;k <N;k++)h[k]=x[k+1]-x[k];for(k=1;k <N;k++)a[k]=h[k]/(h[k]+h[k-1]);for(k=1;k <N;k++)c[k]=1-a[k];for(k=1;k <N;k++)g[k]=3*(c[k]*(y[k+1]-y[k])/h[k]+a[k]*(y[k]-y[k-1])/h[k-1]); c[0]=a[N]=1;g[0]=3*(y[1]-y[0])/h[0]-P0*h[0]/2;g[N]=3*(y[N]-y[N-1])/h[N-1]+Pn*h[N-1]/2;/*第二步:用追赶法解方程组求{m(i)} */ba[0]=c[0]/2;g[0]=g[0]/2;for(i=1;i <N;i++){af[i]=2-a[i]*ba[i-1];g[i]=(g[i]-a[i]*g[i-1])/af[i];ba[i]=c[i]/af[i];}af[N]=2-a[N]*ba[N-1];g[N]=(g[N]-a[N]*g[N-1])/af[N];m[N]=g[N]; /*P110 公式:6.32*/ for(i=N-1;i> =0;i--)m[i]=g[i]-ba[i]*m[i+1];/*第三步:求值*/for(i=0;i <=R;i++){/*判断u(i)属于哪一个子区间,即确定k */if(u[i] <x[0] || u[i]> x[N]){/*释放空间*/free(h);free(a);free(c);free(g);free(af);free(ba);free(m);return 1;}k=0;while(u[i]> x[k+1])k++;//p1=(h[k]+2*(u[i]-x[k])*pow((u[i]-x[k+1]),2)*y[k])/pow(h[k],3); //p2=(h[k]-2*(u[i]-x[k+1])*pow((u[i]-x[k]),2)*y[k+1])/pow(h[k],3);p1=(h[k]+2*(u[i]-x[k]))*pow((u[i]-x[k+1]),2)*y[k]/pow(h[k],3);p2=(h[k]-2*(u[i]-x[k+1]))*pow((u[i]-x[k]),2)*y[k+1]/pow(h[k],3); p3=(u[i]-x[k])*pow((u[i]-x[k+1]),2)*m[k]/pow(h[k],2);p4=(u[i]-x[k+1])*pow((u[i]-x[k]),2)*m[k+1]/pow(h[k],2);s[i]=p1+p2+p3+p4;}/*释放空间*/free(h);free(a);free(c);free(g);free(af);free(ba);free(m);return 0;}void main(){int N,R;double *x,*y,*u,*s;double P0,Pn;int i;/*验证算法:*/N=7;R=6;/*分配空间*/if(!(x=(double*)malloc((N+1)*sizeof(double)))){printf( "malloc error!\n ");exit(1);}if(!(y=(double*)malloc((N+1)*sizeof(double)))){printf( "malloc error!\n ");exit(1);}if(!(u=(double*)malloc((R+1)*sizeof(double)))){printf( "malloc error!\n ");exit(1);}if(!(s=(double*)malloc((R+1)*sizeof(double)))){printf( "malloc error!\n ");exit(1);}x[0]=0.5;x[1]=0.7;x[2]=0.9;x[3]=1.1;x[4]=1.3;x[5]=1.5;x[6]=1.7;x[7]=1.9;y[0]=0.4794;y[1]=0.6442;y[2]=0.7833;y[3]=0.8912;y[4]=0.9636;y[5]=0.9975;y[6]=0.9917;y[7]=0.9 463;u[0]=0.6;u[1]=0.8;u[2]=1.0;u[3]=1.2;u[4]=1.4;u[5]=1.6;u[6]=1.8;P0=-0.4794;Pn=-0.9463;if(!SPL( N, R, x, y, P0, Pn, u, s)){/*打印结果*/printf( "\nx= ");for(i=0;i <=N;i++)printf( "%8.1f ",x[i]);printf( "\ny= ");for(i=0;i <=N;i++)printf( "%8.4f ",y[i]);printf( "\n\nu= ");for(i=0;i <=R;i++)printf( "%9.2f ",u[i]);printf( "\ns= ");for(i=0;i <=R;i++)printf( "%9.5f ",s[i]);printf( "\nsin= ");for(i=0;i <=R;i++)printf( "%9.5f ",sin(u[i]));}/*释放空间*/free(x);free(y);free(u);free(s);}/* 测试数据来自课本55页例5 《数值分析》清华大学出版社第四版*/ //输入327.7 4.128 4.329 4.130 3.013.0 -4.0//输出输出三次样条插值函数:1: [27.7 , 28]13.07*(x - 28)^3 + 0.22*(x - 27.7)^3+ 14.84*(28 - x) + 14.31*(x - 27.7)2: [28 , 29]0.066*(29 - x)^3 + 0.1383*(x - 28)^3+ 4.234*(29 - x) + 3.962*(x - 28)3: [29 , 30]0.1383*(30 - x)^3 - 1.519*(x - 29)^3+ 3.962*(30 - x) + 4.519*(x - 29)//三次样条插值函数#include<iostream>#include<iomanip>using namespace std;const int MAX = 50;float x[MAX], y[MAX], h[MAX];float c[MAX], a[MAX], fxym[MAX];float f(int x1, int x2, int x3){float a = (y[x3] - y[x2]) / (x[x3] - x[x2]);float b = (y[x2] - y[x1]) / (x[x2] - x[x1]);return (a - b)/(x[x3] - x[x1]);} //求差分void cal_m(int n){ //用追赶法求解出弯矩向量M……float B[MAX];B[0] = c[0] / 2;for(int i = 1; i < n; i++)B[i] = c[i] / (2 - a[i]*B[i-1]);fxym[0] = fxym[0] / 2;for(i = 1; i <= n; i++)fxym[i] = (fxym[i] - a[i]*fxym[i-1]) / (2 - a[i]*B[i-1]);for(i = n-1; i >= 0; i--)fxym[i] = fxym[i] - B[i]*fxym[i+1];}void printout(int n);int main(){int n,i; char ch;do{cout<<"Please put in the number of the dots:";cin>>n;for(i = 0; i <= n; i++){cout<<"Please put in X"<<i<<':';cin>>x[i]; //cout<<endl;cout<<"Please put in Y"<<i<<':';cin>>y[i]; //cout<<endl;}for(i = 0; i < n; i++) //求步长h[i] = x[i+1] - x[i];cout<<"Please 输入边界条件\n 1: 已知两端的一阶导数\n 2:两端的二阶导数已知\n 默认:自然边界条件\n";int t;float f0, f1;cin>>t;switch(t){case 1:cout<<"Please put in Y0\' Y"<<n<<"\'\n";cin>>f0>>f1;c[0] = 1; a[n] = 1;fxym[0] = 6*((y[1] - y[0]) / (x[1] - x[0]) - f0) / h[0];fxym[n] = 6*(f1 - (y[n] - y[n-1]) / (x[n] - x[n-1])) / h[n-1];break;case 2:cout<<"Please put in Y0\" Y"<<n<<"\"\n";cin>>f0>>f1;c[0] = a[n] = 0;fxym[0] = 2*f0; fxym[n] = 2*f1;break;default:cout<<"不可用\n";//待定};//switchfor(i = 1; i < n; i++)fxym[i] = 6 * f(i-1, i, i+1);for(i = 1; i < n; i++){a[i] = h[i-1] / (h[i] + h[i-1]);c[i] = 1 - a[i];}a[n] = h[n-1] / (h[n-1] + h[n]);cal_m(n);cout<<"\n输出三次样条插值函数:\n";printout(n);cout<<"Do you to have anther try ? y/n :";cin>>ch;}while(ch == 'y' || ch == 'Y');return 0;}void printout(int n){cout<<setprecision(6);for(int i = 0; i < n; i++){cout<<i+1<<": ["<<x[i]<<" , "<<x[i+1]<<"]\n"<<"\t";/*cout<<fxym[i]/(6*h[i])<<" * ("<<x[i+1]<<" - x)^3 + "<<<<" * (x - "<<x[i]<<")^3 + "<<(y[i] - fxym[i]*h[i]*h[i]/6)/h[i]<<" * ("<<x[i+1]<<" - x) + "<<(y[i+1] - fxym[i+1]*h[i]*h[i]/6)/h[i]<<"(x - "<<x[i]<<")\n";cout<<endl;*/float t = fxym[i]/(6*h[i]);if(t > 0)cout<<t<<"*("<<x[i+1]<<" - x)^3";else cout<<-t<<"*(x - "<<x[i+1]<<")^3";t = fxym[i+1]/(6*h[i]);if(t > 0)cout<<" + "<<t<<"*(x - "<<x[i]<<")^3";else cout<<" - "<<-t<<"*(x - "<<x[i]<<")^3";cout<<"\n\t";t = (y[i] - fxym[i]*h[i]*h[i]/6)/h[i];if(t > 0)cout<<"+ "<<t<<"*("<<x[i+1]<<" - x)";else cout<<"- "<<-t<<"*("<<x[i+1]<<" - x)";t = (y[i+1] - fxym[i+1]*h[i]*h[i]/6)/h[i];if(t > 0)cout<<" + "<<t<<"*(x - "<<x[i]<<")";else cout<<" - "<<-t<<"*(x - "<<x[i]<<")";cout<<endl<<endl;}cout<<endl;}。
三次样条插值matlab代码实现
三次样条插值是一种常用的数值分析方法,用于在给定的数据点上拟合出一个光滑的曲线。
在Matlab中,可以使用内置的spline函数来实现三次样条插值。
以下是一个简单的示例代码:
matlab.
% 创建一些示例数据点。
x = 1:5;
y = [3 6 5 8 9];
% 使用spline函数进行三次样条插值。
xx = 1:0.1:5;
yy = spline(x, y, xx);
% 绘制原始数据点和插值结果。
plot(x, y, 'o', xx, yy, '-');
legend('原始数据', '插值结果');
在这个示例中,我们首先创建了一些示例数据点x和y。
然后使用spline函数对这些数据点进行三次样条插值,得到了插值结果xx和yy。
最后,我们使用plot函数将原始数据点和插值结果进行了可视化展示。
需要注意的是,样条插值是一种较为复杂的数值计算方法,需要对输入数据进行适当的处理和理解。
在实际应用中,可能需要根据具体情况对插值方法进行调整和优化,以获得更好的结果。
希望这个简单的示例能够帮助你理解如何在Matlab中实现三次样条插值。
如果你有更多的问题或者需要进一步的解释,请随时告诉我。
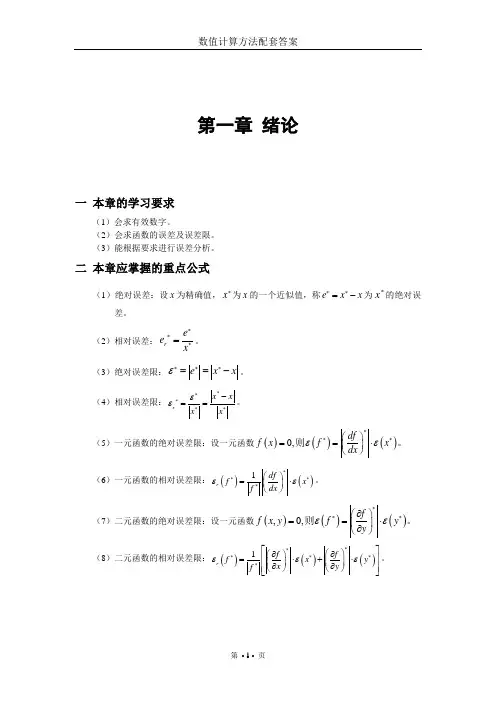
第一章 绪论一 本章的学习要求(1)会求有效数字。
(2)会求函数的误差及误差限。
(3)能根据要求进行误差分析。
二 本章应掌握的重点公式(1)绝对误差:设x 为精确值,x *为x 的一个近似值,称e x x **=-为x *的绝对误差。
(2)相对误差:r e e x***=。
(3)绝对误差限:e x x ε***==-。
(4)相对误差限:r x x xxεε*****-==。
(5)一元函数的绝对误差限:设一元函数()()()0,df f x f x dx εε***⎛⎫==⋅ ⎪⎝⎭则。
(6)一元函数的相对误差限:()()1r df f x dx f εε****⎛⎫=⋅ ⎪⎝⎭。
(7)二元函数的绝对误差限:设一元函数()()(),0,f f x y f y y εε***⎛⎫∂==⋅ ⎪∂⎝⎭则。
(8)二元函数的相对误差限:()()()1r f f f x y x y f εεε******⎡⎤⎛⎫∂∂⎛⎫⎢⎥=⋅+⋅ ⎪ ⎪∂∂⎝⎭⎢⎥⎝⎭⎣⎦。
三 本章习题解析1. 下列各数都是经过四舍五入得到的近似值,(1)试指出它们有几位有效数字,(2)分别估计1123A X X X ***=及224X A X **=的相对误差限。
12341.1021,0.031,385.6,56.430x x x x ****====解:(1)1x *有5位有效数字,2x *有2位有效数字,3x *有4位有效数字,4x *有5位有效数字。
(2)1111123231312123,,,,A A AA x x x x x x x x x x x x ∂∂∂====∂∂∂由题可知:1A *为1A 的近似值,123,,x x x ***分别为123,,x x x 近似值。
所以()()111rA A Aεε***=()()()12311111123A A A x x x A X X X εεε*******⎡⎤⎢⎥=++⎢⎥⎢⎥⎣⎦⎛⎫⎛⎫⎛⎫∂∂∂ ⎪ ⎪ ⎪∂∂∂⎝⎭⎝⎭⎝⎭43123131212311111010100.215222x x x x x x x x x **-**-**-***⎡⎤=⨯⨯+⨯⨯+⨯⨯=⎢⎥⎣⎦()222222424441,,,X A Ax A X x x x x ∂∂===-∂∂则有同理有2A *为2A 的近似值,2x *,4x *为2x ,4x 的近似值,代入相对误差限公式:()()222rA A Aεε***=()()24212224A A X X A X X εε*****⎡⎤⎢⎥=+⎢⎥⎢⎥⎣⎦⎛⎫⎛⎫∂∂ ⎪ ⎪∂∂⎝⎭⎝⎭()33542224411*********X X X X X **--***⎡⎤⎢⎥=⨯⨯+⨯⨯=⎢⎥⎣⎦2. 正方形的边长大约为100cm ,怎样测量才能使其面积误差不超过21cm ? 解:设正方形的边长为x ,则面积为2S x =,2dsx dx=,在这里设x *为边长的近似值,S *为面积的近似值:由题可知:()()1ds s x dx εε***=≤⎛⎫ ⎪⎝⎭即:()21x x ε**⋅≤ 推出:()10.005200xcm ε*≤=。


实验报告:牛顿差值多项式&三次样条问题:在区间[-1,1]上分别取n=10、20用两组等距节点对龙格函数21()25f x x作多项式插值及三次样条插值,对每个n 值,分别画出插值函数及()f x 的图形。
实验目的:通过编程实现牛顿插值方法和三次样条方法,加深对多项式插值的理解。
应用所编程序解决实际算例。
实验要求:1. 认真分析问题,深刻理解相关理论知识并能熟练应用; 2. 编写相关程序并进行实验; 3. 调试程序,得到最终结果; 4. 分析解释实验结果; 5. 按照要求完成实验报告。
实验原理:详见《数值分析 第5版》第二章相关内容。
实验内容:(1)牛顿插值多项式1.1 当n=10时:在Matlab 下编写代码完成计算和画图。
结果如下:代码:clear allclcx1=-1:0.2:1;y1=1./(1+25.*x1.^2);n=length(x1);f=y1(:);for j=2:nfor i=n:-1:jf(i)=(f(i)-f(i-1))/(x1(i)-x1(i-j+1));endendsyms F x p;F(1)=1;p(1)=y1(1);for i=2:nF(i)=F(i-1)*(x-x1(i-1));p(i)=f(i)*F(i);endsyms PP=sum(p);P10=vpa(expand(P),5);x0=-1:0.001:1;y0=subs(P,x,x0);y2=subs(1/(1+25*x^2),x,x0);plot(x0,y0,x0,y2)grid onxlabel('x')ylabel('y')P10即我们所求的牛顿插值多项式,其结果为:P10(x)=-220.94*x^10+494.91*x^8-9.5065e-14*x^7-381.43*x^6-8.504e-14*x^5+123.36* x^4+2.0202e-14*x^3-16.855*x^2-6.6594e-16*x+1.0并且这里也能得到该牛顿插值多项式的在[-1,1]上的图形,并和原函数进行对比(见Fig.1)。
三次样条插值函数自然边界条件物理意义三次样条插值函数是一种常用的数值计算方法,它可以通过已知数据点之间的插值来近似估算未知数据点的函数值。
在实际应用中,经常会遇到需要根据有限的数据点来估算未知数据点的情况,而三次样条插值函数正是为了解决这个问题而提出的。
三次样条插值函数的物理意义是利用已知数据点之间的曲线来拟合一条平滑曲线,以达到近似估算未知数据点的目的。
它的定义是在每个相邻数据点之间用一个三次多项式来拟合曲线,并且要求这些多项式在各个数据点处的函数值、一阶导数和二阶导数都相等。
这样一来,三次样条插值函数既能够较好地逼近已知数据点,又能够保持曲线的平滑性和连续性。
三次样条插值函数的自然边界条件是指在首尾两个数据点处的二阶导数为零。
这个条件的物理意义是在曲线的起始和结束位置,由于没有额外的信息来估算导数值,所以假设导数为零是较为合理的。
这样一来,三次样条插值函数在首尾两个数据点处的曲线形状将会更加平滑,而不会出现急剧变化。
三次样条插值函数的应用非常广泛,特别是在科学计算、工程建模和数据分析等领域。
例如,在物理实验中,我们常常只能测量到有限个数据点,但是我们希望能够获得整个实验过程中的连续函数曲线。
这时,就可以使用三次样条插值函数来近似估算实验过程中未测量到的数据点,以获得更加完整的实验结果。
另一个例子是在地图绘制中,我们通常只能获得有限的地理坐标点,但是我们希望能够绘制出平滑而连续的地图曲线。
这时,可以使用三次样条插值函数来填充地理坐标点之间的空白区域,以获得更加真实和精确的地图展示。
三次样条插值函数还可以用于图像处理、信号处理和数值逼近等领域。
在这些应用中,三次样条插值函数的物理意义是通过已知数据点之间的插值来近似未知数据点的函数值,以达到数据平滑和连续性的目的。
三次样条插值函数是一种常用的数值计算方法,它通过已知数据点之间的插值来近似估算未知数据点的函数值。
它的物理意义是利用已知数据点之间的曲线来拟合一条平滑曲线,以达到近似估算未知数据点的目的。
![2[1].7三次样条插值](https://uimg.taocdn.com/af64461fff00bed5b9f31dc1.webp)
常见插值算法--拉格朗⽇插值、三次卷积插值、三次样条插值、兰克索斯插值写在前⾯本⽂简单介绍了⼏种常见的插值算法并附带了相应的python代码,本⽂公式使⽤latex编写,如有错误欢迎评论指出,如果谁知道如何修改latex字号也欢迎留⾔关于⼀维、⼆维和多维插值三次卷积插值、拉格朗⽇两点插值(线性插值)、兰克索斯插值在⼆维插值时改变x和y⽅向的计算顺序不影响最终结果,这三个也是图像缩放插值时常⽤的插值算法,⽽其他插值在改变计算顺序时会产⽣明显差异,多维的情况笔者没有尝试,读者可以⾃⾏尝试或推导最近邻插值法(Nearest Neighbour Interpolation)在待求像素的四邻像素中,将距离待求像素最近的像素值赋给待求像素p_{11}p_{12}pp_{21}p_{22}python代码1def NN_interpolation(srcImg, dstH, dstW):2 scrH, scrW, _ = srcImg.shape3 dstImg = np.zeros((dstH, dstW, 3), dtype=np.uint8)4for i in range(dstH - 1):5for j in range(dstW - 1):6 scrX = round(i * (scrH / dstH))7 scrY = round(j * (scrW / dstW))8 dstImg[i, j] = srcImg[scrX, scrY]9return dstImg拉格朗⽇插值(Lagrange Interpolation)拉格朗⽇插值法需要找到k个p_i(x)函数,使得每个函数分别在在x_i处取值为1,其余点取值为0,则y_ip_i(x)可以保证在x_i处取值为y_i,在其余点取值为0,因此L_k(x)能恰好经过所有点,这样的多项式被称为拉格朗⽇插值多项式,记为L_k(x)=\sum_{i=1}^ky_ip_i(x)p_i(x)=\prod_{j \neq i}^{1 \leq j \leq k}\frac{x-x_j}{x_i-x_j}以四点即三次图像插值为例,因为横坐标间隔为1,则设四个点横坐标为-1、0、1和2,可得p_1(x)、p_2(x)、p_3(x)和p_4(x)假设y_1、y_2、y_3和y_4分别为1、2、-1、4,则可得拉格朗⽇函数如下图所⽰,待插值点横坐标范围为[0,1]在K=2时在k=2时,也被称为线性插值通⽤公式p_1=\frac{x-x_2}{x_1-x_2}p_2=\frac{x-x_1}{x_2-x_1}\begin{align} L_2x &= p_1y_1+p_2y_2 \nonumber \\ &= \frac{x-x_2}{x_1-x_2}y_1 + \frac{x-x_1}{x_2-x_1}y_2 \nonumber \end{align}图像插值像素分布如图所⽰p_{11}p_{12}pp_{21}p_{22}即当x_{i+1}=x_i+1时,设p与p_{11}的横纵坐标差分别为dx和dy\begin{align} L_2x &= \frac{x-x_2}{x_1-x_2}y_1 + \frac{x-x_1}{x_2-x_1}y_2 \nonumber \\ &= (x_2-x)y_1+(x-x_1)y_2 \nonumber \\ &= (1-dx)y_1+dxy_2 \nonumber \\ &= (y_2-y_1)dx+y_1 \nonumber \end{align}L_2'x=y_2-y_1在K=3时通⽤公式p_1=\frac{x-x_2}{x_1-x_2}\frac{x-x_3}{x_1-x_3}p_2=\frac{x-x_1}{x_2-x_1}\frac{x-x_3}{x_2-x_3}p_3=\frac{x-x_1}{x_3-x_1}\frac{x-x_2}{x_3-x_2}\begin{align} L_3x &= p_1y_1+p_2y_2+p_3y_3 \nonumber \\ &= \frac{x-x_2}{x_1-x_2}\frac{x-x_3}{x_1-x_3}y_1+\frac{x-x_1}{x_2-x_1}\frac{x-x_3}{x_2-x_3}y_2+\frac{x-x_1}{x_3-x_1}\frac{x-x_2}{x_3-x_2}y_3 \nonumber \end{align}图像插值像素分布如图所⽰p_{11}p_{12}p_{13}p_{21}p_{22}p_{23}pp_{31}p_{32}p_{33}即当x_{i+1}=x_i+1时,设p与p_{11}的横纵坐标差分别为dx和dy\begin{align} L_3x &= \frac{x-x_2}{x_1-x_2}\frac{x-x_3}{x_1-x_3}y_1 + \frac{x-x_1}{x_2-x_1}\frac{x-x_3}{x_2-x_3}y_2 + \frac{x-x_1}{x_3-x_1}\frac{x-x_2}{x_3-x_2}y_3 \nonumber \\ &= \frac{-dx(1-dx)}{(-1)\cdot(-2)}y_1 + \frac{-(1+dx)(1-dx)}{1\cdot(-1)}y_2 + \frac{(1+dx)dx}{2\cdot 1}y_3 \nonumber \\ &= (\frac{1}{2}d^2x-\frac{1}{2}dx)y_1 - (d^2x-1)y_2 + (\frac{1}{2}d^2x+\frac{1}{2}dx)y_3 \nonumber \\ &= d^2x(\frac{1}{2}y_1-y_2+\frac{1}{2}y_3)+dx(-\frac{1}{2}y_1+\frac{1}{2}y_3)+y_2 \nonumber \end{align}L_3'x=dx(y_1-2y_2+y_3)+(\frac{1}{2}y_3-\frac{1}{2}y_1)在K=4时通⽤公式p_1=\frac{x-x_2}{x_1-x_2}\frac{x-x_3}{x_1-x_3}\frac{x-x_4}{x_1-x_4}p_2=\frac{x-x_1}{x_2-x_1}\frac{x-x_3}{x_2-x_3}\frac{x-x_4}{x_2-x_4}p_3=\frac{x-x_1}{x_3-x_1}\frac{x-x_2}{x_3-x_2}\frac{x-x_4}{x_3-x_4}p_4=\frac{x-x_1}{x_4-x_1}\frac{x-x_2}{x_4-x_2}\frac{x-x_3}{x_4-x_3}\begin{align} L_4x &= p_1y_1+p_2y_2+p_3y_3+p_4y_4 \nonumber \\ &= \frac{x-x_2}{x_1-x_2}\frac{x-x_3}{x_1-x_3}\frac{x-x_4}{x_1-x_4}y_1 + \frac{x-x_1}{x_2-x_1}\frac{x-x_3} {x_2-x_3}\frac{x-x_4}{x_2-x_4}y_2 + \frac{x-x_1}{x_3-x_1}\frac{x-x_2}{x_3-x_2}\frac{x-x_4}{x_3-x_4}y_3 + \frac{x-x_1}{x_4-x_1}\frac{x-x_2}{x_4-x_2}\frac{x-x_3}{x_4-x_3}y_4\nonumber \end{align}图像插值p_{11}p_{12}p_{13}p_{14}p_{21}p_{22}p_{23}p_{24}pp_{31}p_{32}p_{33}p_{34}p_{41}p_{42}p_{43}p_{44}即当x_{i+1}=x_i+1时,设p与p_{11}的横纵坐标差分别为dx和dy\begin{align} L_4x &= \frac{x-x_2}{x_1-x_2}\frac{x-x_3}{x_1-x_3}\frac{x-x_4}{x_1-x_4}y_1 + \frac{x-x_1}{x_2-x_1}\frac{x-x_3}{x_2-x_3}\frac{x-x_4}{x_2-x_4}y_2 + \frac{x-x_1}{x_3-x_1}\frac{x-x_2}{x_3-x_2}\frac{x-x_4}{x_3-x_4}y_3 + \frac{x-x_1}{x_4-x_1}\frac{x-x_2}{x_4-x_2}\frac{x-x_3}{x_4-x_3}y_4 \nonumber \\ &= \frac{dx[-(1-dx)][-(2-dx)]}{(-1)\cdot(-2)\cdot(-3)}y_1 + \frac{(1+dx)[-(1-dx)][-(2-dx)]}{1\cdot(-1)\cdot(-2)}y_2 + \frac{(1+dx)dx[-(2-dx)]}{2\cdot 1\cdot(-1)}y_3 + \frac{(1+dx)dx[-(1-dx)]}{3\cdot 2\cdot 1}y_4 \nonumber \\ &= \frac{d^3x-3d^2x+2dx}{-6}y1 + \frac{d^3x-2d^2x-dx+2}{2}y_2 + \frac{d^3x-d^2x-2dx}{-2}y_3 + \frac{d^3x-dx}{6}y_4 \nonumber \\ &= d^3x(-\frac{1}{6}y_1+\frac{1}{2}y_2-\frac{1} {2}y_3+\frac{1}{6}y_4)+d^2x(\frac{1}{2}y_1-y_2+\frac{1}{2}y_3)+dx(-\frac{1}{3}y_1-\frac{1}{2}y_2+y_3-\frac{1}{6}y_4)+y_2 \nonumber \end{align}\begin{align} L_4'x &= d^2x(-\frac{1}{2}y_1+\frac{3}{2}y_2-\frac{3}{2}y_3+\frac{1}{2}y_4)+dx(y_1-2y_2+y_3)+(-\frac{1}{3}y_1-\frac{1}{2}y_2+y_3-\frac{1}{6}y_4) \nonumber \\ &= -[\frac{1}{2}d^2x(y_1-3y_2+3y_3-y_4)-dx(y_1-2y_2+y_3)+\frac{1}{6}(2y_1+3y_2-6y_3+y_4)] \nonumber \end{align}python代码插值核计算的时候乘法和加减法计算的顺序不同可能会导致结果存在细微的差异,读者可以⾃⾏研究⼀下1class BiLagrangeInterpolation:2 @staticmethod3def LagrangeInterpolation2(x, y1, y2):4 f1 = 1 - x5 f2 = x6 result = y1 * f1 + y2 * f27return result89 @staticmethod10def LagrangeInterpolation3(x, y1, y2, y3):11 f1 = (x ** 2 - x) / 2.012 f2 = 1 - x ** 213 f3 = (x ** 2 + x) / 2.014 result = y1 * f1 + y2 * f2 + y3 * f315return result1617 @staticmethod18def LagrangeInterpolation4(x, y1, y2, y3, y4):19 f1 = - (x ** 3 - 3 * x ** 2 + 2 * x) / 6.020 f2 = (x ** 3 - 2 * x ** 2 - x + 2) / 2.021 f3 = - (x ** 3 - x ** 2 - 2 * x) / 2.022 f4 = (x ** 3 - x) / 6.023 result = y1 * f1 + y2 * f2 + y3 * f3 + y4 * f424return result2526def biLag2_2(self, srcImg, dstH, dstW):27 dstH, dstW = int(dstH), int(dstW)28 srcH, srcW, _ = srcImg.shape29 srcImg = np.pad(srcImg, ((1, 1), (1, 1), (0, 0)), 'edge')30 dstImg = np.zeros((dstH, dstW, 3), dtype=np.uint8)31for dstY in range(dstH):32for dstX in range(dstW):33for channel in [0, 1, 2]:34# p11 p1235# p36# p21 p2237# 储存为 p(y, x)38 p = [dstY * srcH / dstH, dstX * srcW / dstW]39 p11 = [math.floor(p[0]), math.floor(p[1])]40 p12 = [p11[0], p11[1] + 1]4142 p21 = [p11[0] + 1, p11[1]]43 p22 = [p21[0], p12[1]]4445 diff_y, diff_x = p[0] - p11[0], p[1] - p11[1]46 r1 = grangeInterpolation2(diff_x, srcImg[p11[0], p11[1], channel], srcImg[p12[0], p12[1], channel])47 r2 = grangeInterpolation2(diff_x, srcImg[p21[0], p21[1], channel], srcImg[p22[0], p22[1], channel])4849 c = grangeInterpolation2(diff_y, r1, r2)5051 dstImg[dstY, dstX, channel] = np.clip(c, 0, 255)52return dstImg5354def biLag3_3(self, srcImg, dstH, dstW):55 dstH, dstW = int(dstH), int(dstW)56 srcH, srcW, _ = srcImg.shape57 srcImg = np.pad(srcImg, ((1, 1), (1, 1), (0, 0)), 'edge')58 dstImg = np.zeros((dstH, dstW, 3), dtype=np.uint8)59for dstY in range(dstH):60for dstX in range(dstW):61for channel in [0, 1, 2]:62# p11 p12 p1363#64# p21 p22 p2365# p66# p31 p32 p3367# 储存为 p(y, x)68 p = [dstY * srcH / dstH, dstX * srcW / dstW]69 p22 = [math.floor(p[0]), math.floor(p[1])]70 p21 = [p22[0], p22[1] - 1]71 p23 = [p22[0], p22[1] + 1]7273 p11 = [p21[0] - 1, p21[1]]74 p12 = [p11[0], p22[1]]75 p13 = [p11[0], p23[1]]7677 p31 = [p21[0] + 1, p21[1]]78 p32 = [p31[0], p22[1]]79 p33 = [p31[0], p23[1]]8081 diff_y, diff_x = p[0] - p22[0], p[1] - p22[1]82 r1 = grangeInterpolation3(diff_x, srcImg[p11[0], p11[1], channel], srcImg[p12[0], p12[1], channel], srcImg[p13[0], p13[1], channel])83 r2 = grangeInterpolation3(diff_x, srcImg[p21[0], p21[1], channel], srcImg[p22[0], p22[1], channel], srcImg[p23[0], p23[1], channel])84 r3 = grangeInterpolation3(diff_x, srcImg[p31[0], p31[1], channel], srcImg[p32[0], p32[1], channel], srcImg[p33[0], p33[1], channel]) 8586 c = grangeInterpolation3(diff_y, r1, r2, r3)8788 dstImg[dstY, dstX, channel] = np.clip(c, 0, 255)89return dstImg9091def biLag4_4(self, srcImg, dstH, dstW):92 dstH, dstW = int(dstH), int(dstW)93 srcH, srcW, _ = srcImg.shape94 srcImg = np.pad(srcImg, ((1, 2), (1, 2), (0, 0)), 'edge')95 dstImg = np.zeros((dstH, dstW, 3), dtype=np.uint8)96for dstY in range(dstH):97for dstX in range(dstW):98for channel in [0, 1, 2]:99# p11 p12 p13 p14100#101# p21 p22 p23 p24102# p103# p31 p32 p33 p34104#105# p41 p42 p43 p44106# 储存为 p(y, x)107 p = [dstY * srcH / dstH, dstX * srcW / dstW]108 p22 = [math.floor(p[0]), math.floor(p[1])]109 p21 = [p22[0], p22[1] - 1]110 p23 = [p22[0], p22[1] + 1]111 p24 = [p22[0], p22[1] + 2]112113 p11 = [p21[0] - 1, p21[1]]114 p12 = [p11[0], p22[1]]115 p13 = [p11[0], p23[1]]116 p14 = [p11[0], p24[1]]117118 p31 = [p21[0] + 1, p21[1]]119 p32 = [p31[0], p22[1]]120 p33 = [p31[0], p23[1]]121 p34 = [p31[0], p24[1]]122123 p41 = [p21[0] + 2, p21[1]]124 p42 = [p41[0], p22[1]]125 p43 = [p41[0], p23[1]]126 p44 = [p41[0], p24[1]]127128 diff_y, diff_x = p[0] - p22[0], p[1] - p22[1]129 r1 = grangeInterpolation4(diff_x, srcImg[p11[0], p11[1], channel], srcImg[p12[0], p12[1], channel], srcImg[p13[0], p13[1], channel], srcImg[p14[0], p14[1], channel]) 130 r2 = grangeInterpolation4(diff_x, srcImg[p21[0], p21[1], channel], srcImg[p22[0], p22[1], channel], srcImg[p23[0], p23[1], channel], srcImg[p24[0], p24[1], channel]) 131 r3 = grangeInterpolation4(diff_x, srcImg[p31[0], p31[1], channel], srcImg[p32[0], p32[1], channel], srcImg[p33[0], p33[1], channel], srcImg[p34[0], p34[1], channel]) 132 r4 = grangeInterpolation4(diff_x, srcImg[p41[0], p41[1], channel], srcImg[p42[0], p42[1], channel], srcImg[p43[0], p43[1], channel], srcImg[p44[0], p44[1], channel]) 133134 c = grangeInterpolation4(diff_y, r1, r2, r3, r4)135136 dstImg[dstY, dstX, channel] = np.clip(c, 0, 255)137return dstImg三次卷积插值法(Cubic Convolution Interpolation)使⽤上图中的卷积核进⾏加权平均计算,卷积核为u(s),四个等距(距离为1)的采样点记为x_0、x_1、x_2和x_3,采样数值记为y_0、y_1、y_2和y_3,且保证四个点均在[-2,2]区间上,计算得到g(x),假设y_1、y_2、y_3和y_4分别为1、2、-1、4,则可得三次卷积插值函数如下图所⽰,待插值点横坐标范围为[0,1]公式推导设u(s)=\begin{cases} A_1|s|^3+B_1|s|^2+C_1|s|+D_1, &0<|s|<1 \\ A_2|s|^3+B_2|s|^2+C_2|s|+D_2, &1<|s|<2 \\ 1, &s=0 \\ 0, &otherwise \end{cases}\because函数在s=0,1,2处连续\therefore\begin{cases} 1=u(0^+)=D_1 \\ 0=u(1^-)=A_1+B_1+C_1+D_1 \\ 0=u(1^+)=A_2+B_2+C_2+D_2 \\ 0=u(2^-)=8A_2+4B_2+2C_2+D_2 \end{cases} (1)\because函数在s=0,1,2处导函数连续\therefore\begin{cases} u'(0^-)=u'(0+) \\ u'(1^-)=u'(1+) \\ u'(2^-)=u'(2+)\end{cases} \Rightarrow \begin{cases} -C_1=C_1 \\ 3A_1+2B_1+C_1=3A_2+2B_2+C_2\\ 12A_2+4B_2+C+2=0 \end{cases} ~~~~ (2)联⽴⽅程组(1)(2),设A_2=a,解得\begin{cases} A_1=a+2 \\ B_1=-(a+3) \\ C_1=0 \\ D_1=1 \\ A_2=a \\ B_2=-5a \\ C_2=8a \\ D_2=-4a \end{cases}\Rightarrow u(s)=\begin{cases} (a+2)|s|^3-(a+3)|s|^2+1, &0<|s|<1 \\ A_2|s|^3+B_2|s|^2+C_2|s|+D_2, &1<|s|<2\\ 1, &s=0 \\ 0, &otherwise \end{cases}\because g(x)=\sum_kC_ku(s+j-k), ~~~~k=j-1,j, j+1,j+2且0<s<1⼜\because \begin{cases}\begin{align} u(s+1)&=as^3-2as^2+as \nonumber \\ u(s)&=(a+2)s^3-(a+3)s^2+1 \nonumber \\ u(s-1)&=-(a+2)s^3+(2a+3)s^2-as \nonumber \\ u(s-2)&=-as^3+as^2 \nonumber \end{align}\end{cases}\begin{align} \therefore g(x) &= C_{j-1}u(s+1)+C_{j}u(s)+C_{j+1}u(s-1)+C_{j+2}u(s-2) \nonumber \\ &= C_{j-1}(as^3-2as^2+as)+C_j[(a+2)s^3-(a+3)s^2+1]+C_{j+1}[-(a+2)s^3+ (2a+3)s^2-as]+C_{j+2}[-a^3+as^2] \nonumber \\ &= s^3[aC_{j-1}+(a+2)C_j-(a+2)C_{j+1}-aC_{j+2}]+s^2[-2aC_{j-1}-(a+3)C_j+(2a+3)C_{j+1}+aC_{j+2}]+s[aC_{j-1}-aC_{j+1}]+C_j \nonumber \end{align} ~~(3)f在x_j处泰勒展开得到f(x)=f(x_j)+f'(x_j)(x-x_j)+\frac{1}{2}f''(x_j)(x-x_j)^2+\cdots\therefore \begin{cases} f(x_{j+1})=f(x_j)+f'(x_j)(x_{j+1}-x_j)+\frac{1}{2}f''(x_j)(x_{j+1}-x_j)^2+\cdots \\ f(x_{j+2})=f(x_j)+f'(x_j)(x_{j+2}-x_j)+\frac{1}{2}f''(x_j)(x_{j+2}-x_j)^2+\cdots \\ f(x_{j-1})=f(x_j)+f'(x_j)(x_{j-1}-x_j)+\frac{1}{2}f''(x_j)(x_{j-1}-x_j)^2+\cdots \end{cases}令x_{j+1}-x_j=h\because x_{i+1}=x_i+1\therefore x_{j+2}-x_j=2h,x_{j-1}-x_j=-h\therefore \begin{cases} f(x_{j+2})=f(x_j)+2f'(x_j)h+2f''(x_j)h^2+\cdots \\ f(x_{j+1})=f(x_j)+f'(x_j)h+\frac{1}{2}f''(x_j)h^2+\cdots \\ f(x_{j-1})=f(x_j)-f'(x_j)h+\frac{1}{2}f''(x_j)h^2+\cdots \end{cases}\therefore \begin{cases} c_{j-1}=f(x_j)-f'(x_j)h+\frac{1}{2}f''(x_j)h^2+o(h^3) \\ c_j=f(x_j) \\ c_{j+1}=f(x_j)+f'(x_j)h+\frac{1}{2}f''(x_j)h^2+o(h^3)\\ c_{j+2}=f(x_j)+2f'(x_j)h+2f''(x_j)h^2+o(h^3) \end{cases} ~~ (4)将(4)代⼊(3),得g(x)=-(2a+1)[2hf'(x_j)+h^2f''(x_j)]s^3+[(6a+3)hf'(x_j)+\frac{4a+3}{2}h^2f''(x_j)]s^2-2ahf'(x_j)s+f(x_j)+o(h^3)\because h=1,s=x-x_J\therefore sh=x-x_j\begin{align}\therefore f(x)&= f(x_j)+f'(x_j)(x-x_j)+\frac{1}{2}f''(x_j)(x-x_j)^2+o(h^3) \nonumber \\ &= f(x_j)+f'(x_j)sh+\frac{1}{2}f''(x_j)s^2h^2+o(h^3) \nonumber \end{align}\therefore f(x)-g(x)=(2a+1)[2hf'(x_j)+h^2f''(x_j)]s^3-(2a+1)[3hf'(x_j)+h^2f''(x_j)]s^2+[(2a+1)hf'(x_j)]s+o(h^3)\because 期望f(x)-g(x)趋于0\therefore 2a+1=0 \Rightarrow a=-\frac{1}{2}\therefore u(s)=\begin{cases} \frac{3}{2}|s|^3-\frac{5}{2}|s|^2+1, &0<|s|<1 \\ -\frac{1}{2}|s|^3+\frac{5}{2}|s|^2-4|s|+2, &1<|s|<2 \\ 1, &s=0 \\ 0, &otherwise \end{cases}\therefore g(s)=s^3[-\frac{1}{2}c_{j-1}+\frac{3}{2}c_j-\frac{3}{2}c_{j+1}+\frac{1}{2}c_{j+2}]+s^2[c_{j-1}-\frac{5}{2}c_j+2c_{j+1}-\frac{1}{2}c_{j+2}]+s[-\frac{1}{2}c_{j-1}+\frac{1} {2}c_{j+1}]+c_j图像插值p_{11}p_{12}p_{13}p_{14}p_{21}p_{22}p_{23}p_{24}pp_{31}p_{32}p_{33}p_{34}p_{41}p_{42}p_{43}p_{44}python代码1class BiCubicConvInterpolation:2 @staticmethod3def CubicConvInterpolation1(p0, p1, p2, p3, s):4# ⽤g(s)公式计算,已经将四个u(s)计算完毕并整理5# as^3 + bs^2 + cs + d6 a = 0.5 * (-p0 + 3.0 * p1 - 3.0 * p2 + p3)7 b = 0.5 * (2.0 * p0 - 5.0 * p1 + 4.0 * p2 - p3)8 c = 0.5 * (-p0 + p2)9 d = p110return d + s * (c + s * (b + s * a))1112 @staticmethod13def CubicConvInterpolation2(s):14# ⽤u(s)公式计算15 s = abs(s)16if s <= 1:17return 1.5 * s ** 3 - 2.5 * s ** 2 + 118elif s <= 2:19return -0.5 * s ** 3 + 2.5 * s ** 2 - 4 * s + 220else:21return 02223def biCubic1(self, srcImg, dstH, dstW):24# p11 p12 p13 p1425#26# p21 p22 p23 p2427# p28# p31 p32 p33 p3429#30# p41 p42 p43 p4431 dstH, dstW = int(dstH), int(dstW)32 scrH, scrW, _ = srcImg.shape33 srcImg = np.pad(srcImg, ((1, 1), (1, 1), (0, 0)), 'edge')34 dstImg = np.zeros((dstH, dstW, 1), dtype=np.uint8)35for dstY in range(dstH):36for dstX in range(dstW):37for channel in [0]:38 y = dstY * scrH / dstH39 x = dstX * scrW / dstW40 y1 = math.floor(y)41 x1 = math.floor(x)4243 array = []44for i in [-1, 0, 1, 2]:45 temp = self.CubicConvInterpolation1(srcImg[y1 + i, x1 - 1, channel],46 srcImg[y1 + i, x1, channel],47 srcImg[y1 + i, x1 + 1, channel],48 srcImg[y1 + i, x1 + 2, channel],49 x - x1)50 array.append(temp)5152 temp = self.CubicConvInterpolation1(array[0], array[1], array[2], array[3], y - y1)53 dstImg[dstY, dstX, channel] = np.clip(temp, 0, 255)5455return dstImg5657def biCubic2(self, srcImg, dstH, dstW):58# p11 p12 p13 p1459#60# p21 p22 p23 p2461# p62# p31 p32 p33 p3463#64# p41 p42 p43 p4465 dstH, dstW = int(dstH), int(dstW)66 scrH, scrW, _ = srcImg.shape67 srcImg = np.pad(srcImg, ((1, 1), (1, 1), (0, 0)), 'edge')68 dstImg = np.zeros((dstH, dstW, 3), dtype=np.uint8)69for dstY in range(dstH):70for dstX in range(dstW):71for channel in [0, 1, 2]:72 y = dstY * scrH / dstH73 x = dstX * scrW / dstW74 y1 = math.floor(y)75 x1 = math.floor(x)7677 array = []78for i in [-1, 0, 1, 2]:79 temp = 080for j in [-1, 0, 1, 2]:81 temp += srcImg[y1 + i, x1 + j, channel] * self.CubicConvInterpolation2(x - (x1 + j))82 array.append(temp)8384 temp = 085for i in [-1, 0, 1, 2]:86 temp += array[i + 1] * self.CubicConvInterpolation2(y - (y1 + i))87 dstImg[dstY, dstX, channel] = np.clip(temp, 0, 255)8889return dstImg三次样条插值在n-1个区间上寻找n-1个三次曲线,使其满⾜相邻曲线在端点处值相等、⼀阶导数相等,⼆阶导数相等,在加以边界条件后可得每个曲线的⽅程,然后沿x轴依次偏移对应的距离即可得到插值结果,如仅需要特定范围内的结果,则可以⼤幅减少计算量公式推导设S_i(x)=a_i+b_i(x-x_i)+c_i(x-x_i)^2+d_i(x-x_i)^3, ~~~~i=0,1,...,n-1则 \begin{cases} S_i'(x)=b_i+2c_i(x-x_i)+3d_i(x-x_i)^2\\ S_i''(x)=2c_i+6d_i(x-x_i)\\ S_i'''(x)=6d_i\\ \end{cases} ~~~~i=0,1,...,n-1设h_i(x)=x_{i+1}-x_i,可得\begin{cases} S_i(x)=a_i+b_ih_i+c_ih_i^2+d_ih_i^3\\ S_i'(x)=b_i+2c_ih_i+3d_ih_i^2\\ S_i''(x)=2c_i+6d_ih_i\\ S_i'''(x)=6d_i\\ \end{cases} ~~~~i=0,1,...,n-1\because S_i(x)过点(x_i,y_i)\therefore S_i(x)=a_i=y+i, ~~~~i=0,1,...,n-1 ~~~~~~(1)\because S_i(x)与S_{i+1}(x)在X_{i+1}处相等\therefore S_i(x_{i+1})=S_{i+1}(x_{i+1})\Rightarrow a_i+b_ih_i+c_ih_i^2+d_ih_i^3=y_{i+1}, ~~~~i=0,1,...,n-2~~~~~~(2)\because S_i'(x)与S_{i+1}'(x)在X_{i+1}处相等\therefore S_i'(x)-S_{i+1}'(x)=0\Rightarrow b_i+2c_ih_i+3d_ih_i^2-b_{i+1}=0~~~~~~(3)\because S_i''(x)与S_{i+1}''(x)在X_{i+1}处相等\therefore S_i''(x)-S_{i+1}''(x)=0\Rightarrow 2c_i+6d_ih_i-2c_{i+1}=0, ~~~~i=0,1,...,n-2~~~~~~(4)设m_i=S_i(x_i)=2c_i,即c_i=\frac{1}{2}m_i, ~~~~i=0,1,...,n-1~~~~~~(5)将(5)代⼊(4),得2c_i+6d_ih_i-2c_{i+1}=0\Rightarrow m_i+6h_id_i-m_{i+1}=0\Rightarrow d_i=\frac{m_{i+1}-m_i}{6h_i}, ~~~~i=0,1,...,n-2~~~~~~(6)将(1)(5)(6)代⼊(2),得\begin{align} &a_i+b_ih_i+c_ih_i^2+d_ih_i^3=y_{i+1} \nonumber \\ \Rightarrow&y_i+b_ih_i+\frac{1}{2}m_ih_i^2+\frac{m_{i+1}-m_i}{6h_i}h_i^3=y_{i+1} \nonumber \\\Rightarrow&b_i=\frac{y_{i+1}-y_i}{h_i}-\frac{1}{2}m_ih_i-\frac{1}{6}(m_{i+1}-m_i)h_i \nonumber \\ \Rightarrow&b_i=\frac{y_{i+1}-y_i}{h_i}-\frac{1}{3}m_ih_i-\frac{1}{6}m_{i+1}h_i, ~~~~i=0,1,...,n-2~~~~~~(7) \nonumber \end{align}将(5)(6)(7)代⼊(3),得\begin{align} &\frac{y_{i+1}-y{i}}{h_i}-\frac{1}{3}m_ih_i-\frac{1}{6}m_{i+1}h_i+2\cdot\frac{1}{2}m_ih_i+3\frac{m_{i+1}-m_i}{6h_i}h_i^2-(\frac{y_{i+2}-y_{i+1}}{h_{i+1}}-\frac{1}{3}m_{i+1}h_{i+1}-\frac{1}{6}m_{i+2}h_{i+1})=0 \nonumber \\ \Rightarrow&\frac{y_{i+1}-y{i}}{h_i}-\frac{1}{3}m_ih_i-\frac{1}{6}m_{i+1}h_i+m_ih_i+\frac{1}{2}(m_{i+1}-m_i)h_i-\frac{y_{i+2}-y_{i+1}}{h_{i+1}}+\frac{1}{3}m_{i+1}h_{i+1}+\frac{1}{6}m_{i+2}h_{i+1}=0 \nonumber \\ \Rightarrow&m_ih_i(-\frac{1}{3}+1-\frac{1}{2})+m_{i+1}h_i(-\frac{1}{6}+\frac{1} {2})+\frac{1}{3}m_{i+1}h_{i+1}+\frac{1}{6}m_{i+2}h_{i+1}=\frac{y_{i+2}-y_{i+1}}{h_{i+1}}-\frac{y_{i+1}-y_{i}}{h_{i}} \nonumber \\ \Rightarrow&\frac{1}{6}(m_ih_i+2m_{i+1}h_i+2m_{i+1}h_{i+1}+m_{i+2}h_{i+1})=\frac{y_{i+2}-y_{i+1}}{h_{i+1}}-\frac{y_{i+1}-y_{i}}{h_{i}} \nonumber \\ \Rightarrow&m_ih_i+2m_{i+1}(h_i+h_{i+1})+m_{i+2}h_{i+1}=6(\frac{y_{i+2}-y_{i+1}}{h_{i+1}}-\frac{y_{i+1}-y_{i}}{h_{i}}), ~~~~i=0,1,...,n-2~~~~~~(8) \nonumber \end{align}由(8)可知i=0,1,...,n-2,则有m_0,m_1,...,m_n,需要两个额外条件⽅程组才有解⾃然边界(Natural)m_0=0,m_n=0\begin{bmatrix} \tiny 1 & 0 & 0 & 0 & 0 & \cdots & 0\\ h_0 & 2(h_0+h_1) & h_1 & 0 & 0 & \cdots & 0\\ 0 & h_1 & 2(h_1+h_2) & h_2 & 0 & \cdots & 0\\ 0 & 0 & h_2 & 2(h_2+h_3) & h_3 & \cdots & 0\\ \vdots& & & \ddots & \ddots & \ddots & \vdots\\ 0 & \cdots & & & h_{n-2} & 2(h_{n-2}+h_{n-1}) & h_{n-1}\\ 0 & \cdots & & & 0 & 0 & 1 \end{bmatrix}\begin{bmatrix} m_0\\m_1\\m_2\\m_3\\\vdots\\m_{n-1}\\m_n \end{bmatrix}=6\begin{bmatrix} 0\\ \frac{y_2-y_1}{h_1}-\frac{y_1-y_0}{h_0}\\ \frac{y_3-y_2}{h_2}-\frac{y_2-y_1}{h_1}\\ \frac{y_4-y_3}{h_3}-\frac{y_3-y_2}{h_2}\\ \vdots\\ \frac{y_n-y_{n-1}}{h_{n-1}}-\frac{y_{n-1}-y_{n-2}}{h_{n-2}}\\ 0 \end{bmatrix}固定边界(Clamped)\begin{align} &\begin{cases} S_0'(x_0)=A\\ S_{n-1}'(x_n)=B \end{cases} \nonumber \\ \Rightarrow&\begin{cases} b_0=A\\ b_{n-1}+2c_{n-1}h_{n-1}+3d_{n-1}h_{n-1}^2=B\end{cases} \nonumber \\ \Rightarrow&\begin{cases} A=\frac{y_1-y_0}{h_0}-\frac{h_0}{2}m_0-\frac{h_0}{6}(m_1-m_0)\\ B=\frac{y_n-y_{n-1}}{h_{n-1}}-\frac{1}{3}m_{n-1}h_{n-1}+m_{n-1}h_{n-1}+\frac{1}{2}m_nh_{n-1}-\frac{1}{2}m_{n-1}h_{n-1} \end{cases} \nonumber \\ \Rightarrow&\begin{cases} 2h_0m_0+h_0m_1=6(\frac{y_1-y_0}{h_0}-A)\\ h_{n-1}m_{n-1}+2h_{n-1}m_{n}=6(B-\frac{y_n-y_{n-1}}{h_{n-1}}) \end{cases} \nonumber \\ \end{align}\begin{bmatrix} 2 & 1 & 0 & 0 & 0 & \cdots & 0\\ h_0 & 2(h_0+h_1) & h_1 & 0 & 0 & \cdots & 0\\ 0 & h_1 & 2(h_1+h_2) & h_2 & 0 & \cdots & 0\\ 0 & 0 & h_2 & 2(h_2+h_3) & h_3 & \cdots & 0\\ \vdots& & & \ddots & \ddots & \ddots & \vdots\\ 0 & \cdots & & & h_{n-2} & 2(h_{n-2}+h_{n-1}) & h_{n-1}\\ 0 & \cdots & & & 0 & 1 & 2 \end{bmatrix}\begin{bmatrix} m_0\\m_1\\m_2\\m_3\\\vdots\\m_{n-1}\\m_n \end{bmatrix}=6\begin{bmatrix} \frac{y_1-y_0}{h_0}-A\\ \frac{y_2-y_1}{h_1}-\frac{y_1-y_0}{h_0}\\ \frac{y_3-y_2}{h_2}-\frac{y_2-y_1}{h_1}\\ \frac{y_4-y_3}{h_3}-\frac{y_3-y_2}{h_2}\\ \vdots\\\frac{y_n-y_{n-1}}{h_{n-1}}-\frac{y_{n-1}-y_{n-2}}{h_{n-2}}\\ B-\frac{y_n-y_{n-1}}{h_{n-1}} \end{bmatrix}⾮节点边界(Not-A-Knot)\begin{align} &\begin{cases} S_0'''(x_1)=S_1'''(x_1)\\ S_{n-2}'''(x_{n-1})=S_{n-1}'''(x_{n-1}) \end{cases} \nonumber \\ \Rightarrow&\begin{cases} 6\cdot\frac{m_1-m_0}{6h_0}=6\cdot\frac{m_2-m_1}{6h_1}\\ 6\cdot\frac{m_{n-1}-m_{n-2}}{6h_{n-2}}=6\cdot\frac{m_n-m_{n-1}}{6h_{n-1}} \end{cases} \nonumber \\ \Rightarrow&\begin{cases} h_1(m_1-m_0)=h_0(m_2-m_1)\\ h_{n-1}(m_{n-1}-m_{n-2})=h_{n-2}(m_n-m_{n-1}) \end{cases} \nonumber \\ \Rightarrow&\begin{cases} -h_1m_0+(h_1+h_0)m_1-h_0m_2=0\\ -h_{n-1}m_{n-2}+(h_{n-1}+h_{n-2})m_{n-1}-h_{n-2}m_n=0 \end{cases} \nonumber \\ \end{align}\begin{bmatrix} -h_1 & h_0+h_1 & -h_0 & 0 & 0 & \cdots & 0\\ h_0 & 2(h_0+h_1) & h_1 & 0 & 0 & \cdots & 0\\ 0 & h_1 & 2(h_1+h_2) & h_2 & 0 & \cdots & 0\\ 0 & 0 & h_2 &2(h_2+h_3) & h_3 & \cdots & 0\\ \vdots& & & \ddots & \ddots & \ddots & \vdots\\ 0 & \cdots & & & h_{n-2} & 2(h_{n-2}+h_{n-1}) & h_{n-1}\\ 0 & \cdots & & & -h_{n-1} & h_{n-1}+h_{n-2} & -h_{n-2} \end{bmatrix}\begin{bmatrix} m_0\\m_1\\m_2\\m_3\\\vdots\\m_{n-1}\\m_n \end{bmatrix}=6\begin{bmatrix} 0\\ \frac{y_2-y_1}{h_1}-\frac{y_1-y_0}{h_0}\\ \frac{y_3-y_2}{h_2}-\frac{y_2-y_1}{h_1}\\ \frac{y_4-y_3}{h_3}-\frac{y_3-y_2}{h_2}\\ \vdots\\ \frac{y_n-y_{n-1}}{h_{n-1}}-\frac{y_{n-1}-y_{n-2}}{h_{n-2}}\\ 0 \end{bmatrix}在n=4时通⽤公式⾃然边界\begin{bmatrix} 1 & 0 & 0 & 0 \\ h_0 & 2(h_0+h_1) & h_1 & 0 \\ 0 & h_1 & 2(h_1+h_2) & h_2 \\ 0 & 0 & 0 & 1 \\ \end{bmatrix}\begin{bmatrix} m_0\\m_1\\m_2\\m_3 \end{bmatrix}=6\begin{bmatrix} 0\\ \frac{y_2-y_1}{h_1}-\frac{y_1-y_0}{h_0}\\ \frac{y_3-y_2}{h_2}-\frac{y_2-y_1}{h_1}\\ 0 \end{bmatrix}固定边界\begin{bmatrix} 2 & 1 & 0 & 0 \\ h_0 & 2(h_0+h_1) & h_1 & 0 \\ 0 & h_1 & 2(h_1+h_2) & h_2 \\ 0 & 0 & 1 & 2 \\ \end{bmatrix}\begin{bmatrix} m_0\\m_1\\m_2\\m_3 \end{bmatrix}=6\begin{bmatrix} \frac{y_1-y_0}{h_0}-A\\ \frac{y_2-y_1}{h_1}-\frac{y_1-y_0}{h_0}\\ \frac{y_3-y_2}{h_2}-\frac{y_2-y_1}{h_1}\\ B-\frac{y_3-y_2}{h_2} \end{bmatrix}⾮节点边界\begin{bmatrix} -h_1 & h_0+h_1 & -h_0 & 0 \\ h_0 & 2(h_0+h_1) & h_1 & 0 \\ 0 & h_1 & 2(h_1+h_2) & h_2 \\ 0 & -h_2 & h_1+h_2 & -h_1 \\ \end{bmatrix}\begin{bmatrix} m_0\\m_1\\m_2\\m_3 \end{bmatrix}=6\begin{bmatrix} 0\\ \frac{y_2-y_1}{h_1}-\frac{y_1-y_0}{h_0}\\ \frac{y_3-y_2}{h_2}-\frac{y_2-y_1}{h_1}\\ 0 \end{bmatrix}图像插值x_{i+1}-x_i=1 \Rightarrow h_i(x)=1在n=4时,即四个点时如下所⽰p_{11}p_{12}p_{13}p_{14}p_{21}p_{22}p_{23}p_{24}pp_{31}p_{32}p_{33}p_{34}p_{41}p_{42}p_{43}p_{44}⾃然边界(可⽤TDMA或化简计算)\begin{bmatrix} 1 & 0 & 0 & 0 \\ 1 & 4 & 1 & 0 \\ 0 & 1 & 4 & 1 \\ 0 & 0 & 0 & 1 \\ \end{bmatrix}\begin{bmatrix} m_0\\m_1\\m_2\\m_3 \end{bmatrix}=6\begin{bmatrix} 0\\ y_0+y_2-2y_1\\ y_1+y_3-2y_2\\ 0 \end{bmatrix}固定边界(只能⽤TDMA计算)\begin{bmatrix} 2 & 1 & 0 & 0 \\ 1 & 4 & 1 & 0 \\ 0 & 1 & 4 & 1 \\ 0 & 0 & 1 & 2 \\ \end{bmatrix}\begin{bmatrix} m_0\\m_1\\m_2\\m_3 \end{bmatrix}=6\begin{bmatrix} y_1-y_0-A\\ y_0+y_2-2y_1\\ y_1+y_3-2y_2\\ y_2-y_3+B \end{bmatrix}⾮节点边界(只能化简计算)\begin{bmatrix} -1 & 2 & -1 & 0 \\ 1 & 4 & 1 & 0 \\ 0 & 1 & 4 & 1 \\ 0 & -1 & 2 & -1 \\ \end{bmatrix}\begin{bmatrix} m_0\\m_1\\m_2\\m_3 \end{bmatrix}=6\begin{bmatrix} 0\\ y_0+y_2-2y_1\\ y_1+y_3-2y_2\\ 0 \end{bmatrix}python代码1class BiSplineInterpolation:2 @staticmethod3 def TDMA(a, b, c, d):4 n = len(d)56 c[0] = c[0] / b[0]7 d[0] = d[0] / b[0]89for i in range(1, n):10 coef = 1.0 / (b[i] - a[i] * c[i - 1])11 c[i] = coef * c[i]12 d[i] = coef * (d[i] - a[i] * d[i - 1])1314for i in range(n - 2, -1, -1):15 d[i] = d[i] - c[i] * d[i + 1]1617return d1819 @staticmethod20 def Simplified_Natural4(y1, y2, y3, y4):21 # 四点⾃然边界化简公式22 d1 = y1 + y3 - 2 * y223 d2 = y2 + y4 - 2 * y32425 k0 = 026 k1 = (4 * d1 - d2) * 0.427 k2 = (4 * d2 - d1) * 0.428 k3 = 02930return [k0, k1, k2, k3]3132 @staticmethod33 def Simplified_Not_A_Knot4(y1, y2, y3, y4):34 # 四点⾮节点边界化简公式35 d1 = y1 + y3 - 2 * y236 d2 = y2 + y4 - 2 * y33738 k0 = 2 * d1 - d239 k1 = d140 k2 = d241 k3 = 2 * d2 - d14243return [k0, k1, k2, k3]4445 # TDMA矩阵说明46 # a0 和 c3 没有实际意义,占位⽤47 # a0 [b0 c0 00 ] [x0] [d0]48 # [a1 b1 c1 0 ] [x1] = [d1]49 # [0 a2 b2 c2] [x2] [d2]50 # [00 a3 b3] c3 [x3] [d3]5152 def SplineInterpolationNatural4(self, x, y1, y2, y3, y4):53 # ⽤TDMA计算54 # matrix_a = [0, 1, 1, 0]55 # matrix_b = [1, 4, 4, 1]56 # matrix_c = [0, 1, 1, 0]57 # matrix_d = [0, 6 * (y1 + y3 - 2 * y2), 6 * (y2 + y4 - 2 * y3), 0]58 # matrix_x = self.TDMA(matrix_a, matrix_b, matrix_c, matrix_d)5960 # 化简计算61 matrix_x = self.Simplified_Natural4(y1, y2, y3, y4)6263 a = y264 b = y3 - y2 - matrix_x[1] / 3.0 - matrix_x[2] / 6.065 c = matrix_x[1] / 2.066 d = (matrix_x[2] - matrix_x[1]) / 6.06768 s = a + b * x + c * x * x + d * x * x * x69return s7071 def SplineInterpolationClamped4(self, x, y1, y2, y3, y4):72 # 仅有TDMA计算,⽆法化简73 A, B = 1, 17475 matrix_a = [0, 1, 1, 1]76 matrix_b = [2, 4, 4, 2]77 matrix_c = [1, 1, 1, 0]78 matrix_d = [6 * (y2 - y1 - A), 6 * (y1 + y3 - 2 * y2), 6 * (y2 + y4 - 2 * y3), 6 * (B - y4 + y3)]79 matrix_x = self.TDMA(matrix_a, matrix_b, matrix_c, matrix_d)8081 a = y282 b = y3 - y2 - matrix_x[1] / 3.0 - matrix_x[2] / 6.083 c = matrix_x[1] / 2.084 d = (matrix_x[2] - matrix_x[1]) / 6.08586 s = a + b * x + c * x * x + d * x * x * x87return s8889 def SplineInterpolationNotAKnot4(self, x, y1, y2, y3, y4):90 # ⽆法使⽤TDMA计算91 matrix_x = self.Simplified_Not_A_Knot4(y1, y2, y3, y4)9293 a = y294 b = y3 - y2 - matrix_x[1] / 3.0 - matrix_x[2] / 6.095 c = matrix_x[1] / 2.096 d = (matrix_x[2] - matrix_x[1]) / 6.09798 s = a + b * x + c * x * x + d * x * x * x99return s100101 def biSpline4(self, srcImg, dstH, dstW):102 dstH, dstW = int(dstH), int(dstW)103 srcH, srcW, _ = srcImg.shape104 srcImg = np.pad(srcImg, ((1, 2), (1, 2), (0, 0)), 'edge')105 dstImg = np.zeros((dstH, dstW, 3), dtype=np.uint8)106for dstY in range(dstH):107for dstX in range(dstW):108for channel in [0, 1, 2]:109 # p11 p12 p13 p14110 #111 # p21 p22 p23 p24112 # p113 # p31 p32 p33 p34114 #115 # p41 p42 p43 p44116 # 储存为 p(y, x)117 p = [dstY * srcH / dstH, dstX * srcW / dstW]118 p22 = [math.floor(p[0]), math.floor(p[1])]119 p21 = [p22[0], p22[1] - 1]120 p23 = [p22[0], p22[1] + 1]121 p24 = [p22[0], p22[1] + 2]122123 p11 = [p21[0] - 1, p21[1]]124 p12 = [p11[0], p22[1]]125 p13 = [p11[0], p23[1]]126 p14 = [p11[0], p24[1]]127128 p31 = [p21[0] + 1, p21[1]]129 p32 = [p31[0], p22[1]]130 p33 = [p31[0], p23[1]]131 p34 = [p31[0], p24[1]]132133 p41 = [p21[0] + 2, p21[1]]134 p42 = [p41[0], p22[1]]135 p43 = [p41[0], p23[1]]136 p44 = [p41[0], p24[1]]137138 diff_y, diff_x = p[0] - p22[0], p[1] - p22[1]139 r1 = self.SplineInterpolationNatural4(diff_x, srcImg[p11[0], p11[1], channel], srcImg[p12[0], p12[1], channel], srcImg[p13[0], p13[1], channel], srcImg[p14[0], p14[1], channel]) 140 r2 = self.SplineInterpolationNatural4(diff_x, srcImg[p21[0], p21[1], channel], srcImg[p22[0], p22[1], channel], srcImg[p23[0], p23[1], channel], srcImg[p24[0], p24[1], channel]) 141 r3 = self.SplineInterpolationNatural4(diff_x, srcImg[p31[0], p31[1], channel], srcImg[p32[0], p32[1], channel], srcImg[p33[0], p33[1], channel], srcImg[p34[0], p34[1], channel]) 142 r4 = self.SplineInterpolationNatural4(diff_x, srcImg[p41[0], p41[1], channel], srcImg[p42[0], p42[1], channel], srcImg[p43[0], p43[1], channel], srcImg[p44[0], p44[1], channel]) 143144 c = self.SplineInterpolationNatural4(diff_y, r1, r2, r3, r4)145146 dstImg[dstY, dstX, channel] = np.clip(c, 0, 255)。
实验报告:牛顿差值多项式&三次样条... . (1)问题:在区间[-1,1]上分别取n=10、20用两组等距节点对龙格函数f (x)---作多项式插25 x 2值及三次样条插值对每个n值,分别画出插值函数矽(x)的图形。
实验目的:通过编程实现牛顿插值方法和三次样条方法,加深对多项式插值的理解。
应用所编程序解决实际算例。
实验要求:1.认真分析问题,深刻理解相关理论知识并能熟练应用;2.编写相关程序并进行实验;3.调试程序,得到最终结果;4.分析解释实验结果;5.按照要求完成实验报告。
实验原理:详见《数值分析第5版》第二章相关容。
实验容:(1)牛顿插值多项式1.1 当 n=10 时:在Matlab下编写代码完成计算和画图。
结果如下:代码:clear allclcx1=-1:0.2:1;y1=1./(1+25.*x1.八2);n=length(x1);f=y1(:);for j=2:nfor i=n:-1:jf(i) = (f(i)-f(i-1))/(x1(i)-x1(i-j+1));endendsyms F x p;F(1)=1;p(1)=y1(1);for i=2:nF(i)=F(i-1)*(x-x1(i-1));p(i)=f(i)*F(i);endsyms PP=sum(p);P10=vpa(expand(P),5);x0=-1:0.001:1;y0=subs(P,x,x0);y2=subs(1/(1+25火x八2),x,x0);plot(x0,y0,x0,y2)grid onxlabel('x')ylabel('y')P10即我们所求的牛顿插值多项式,其结果为:P10(x )=-220.94*x A10+494.91*x A8-9.5065e-14*x A7-381.43*x A6-8.504e-14*x A5+123.36*x A4+2.0202e-14*x A3-16.855*x A2-6.6594e-16*x+1.0并且这里也能得到该牛顿插值多项式的在[-1,1]上的图形,并和原函数进行对比(见Fig.1)。
数值计算方法作业实验4.3 三次样条差值函数实验目的:掌握三次样条插值函数的三弯矩方法。
实验函数:dt ex f xt ⎰∞--=2221)(π实验内容:(1) 编程实现求三次样条插值函数的算法,分别考虑不同的边界条件; (2) 计算各插值节点的弯矩值;(3) 在同一坐标系中绘制函数f(x),插值多项式,三次样条插值多项式的曲线比较插值结果。
实验4.5 三次样条差值函数的收敛性实验目的:多项式插值不一定是收敛的,即插值的节点多,效果不一定好。
对三次样条插值函数如何呢?理论上证明三次样条插值函数的收敛性是比较困难的,通过本实验可以证明这一理论结果。
实验内容:按照一定的规则分别选择等距或非等距的插值节点,并不断增加插值节点的个数。
实验要求:(1) 随着节点个数的增加,比较被逼近函数和三样条插值函数的误差变化情况,分析所得结果并与拉格朗日插值多项式比较;(2) 三次样条插值函数的思想最早产生于工业部门。
作为工业应用的例子,考虑如下例子:某汽车制造商根据三次样条插值函数设计车门曲线,其中一段数据如下:kx012345678910 ky0.00.79 1.53 2.19 2.71 3.03 3.27 2.89 3.06 3.19 3.29ky'0.80.2算法描述:拉格朗日插值:其中是拉格朗日基函数,其表达式为:()∏≠=--=nijj jiji xxxxxl)()(牛顿插值:))...()(](,...,,[....))(](,,[)0](,[)()(11211211----++--+-+=nnnxxxxxxxxxxfxxxxxxxfxxxxfxfxN其中⎪⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎪⎨⎧--=--=--=-)/(]),...,[],...,[(]...,[..],[],[],,[)()(],[11211xxxxxfxxxfxxxfxxxxfxxfxxxfxxxfxfxxfnnnnikjikjkjijijiji三样条插值:所谓三次样条插值多项式Sn(x)是一种分段函数,它在节点Xi(a<X0<X1……<Xn<b)分成的每个小区间[xi-1,xi]上是三次多项式,其在此区间上的表达式如下:],[),6()6(]6)([6)(6)()(111113131iiiiiiiiiiiiiiiiiiiiixxxhyMhMhhyxMMhhyyhxxMihxxMxS-------∈-+-+---+-+-=式中Mi=)(ixS''.因此,只要确定了Mi 的值,就确定了整个表达式,Mi 的计算方法如下:令⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=---+=+=+=+--++++++],,[6)(6111111111i i i i i i i i i i i i i i i i i i i ix x x f h y y h y y h h d h h h h h h λμ则Mi 满足如下n-1个方程:1,...2,1,211-==+++-n i d M M M i i i i i i λμ 常用的边界条件有如下几类:(1) 给定区间两端点的斜率m 0,m n ,即n n n m y x S m y x S ='='='=')(,)(000 (2) 给定区间两端点的二阶导数M0,Mn,即n n n M y x S M y x S =''=''=''='')(,)(000 (3) 假设y=f(x)是以b-a 为周期的周期函数,则要求三次样条插值函数S (x )也为周期函数,对S (x )加上周期条件2,1,0),0()0()(0)(=-=+p x S x S n p p对于第一类边界条件有⎪⎪⎩⎪⎪⎨⎧--=+--=+--)(62)(6211001110n n n n n n i h y y mn h M M m h y y h M M对于第二类边界条件有⎩⎨⎧=+=+-n n n n d M M d M M 221100μλ其中n n n n nnn M u x x f m h d M m x x f h d )1(2]),[(6)1(2)],[(6100001010-+-=-+-=-μλλ那么解就可以为⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛----n n n n n n n d d d d d M M M M M 1210121011...2...............2............................1..2.1......0..2μλμλμλ对于第三类边界条件,)0()0(,,000-=+==n n n x S x S M M y y ,由此推得0010012d M M M n =-++μλ,其中]),1[],[(6,,101010110n n nn n n x x f x x f h h d h h h h h h --+=+=+=μλ,那么解就可以为: ⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛-------1221012101221100...2.............2..............................2..,,.......,..22n n n n n n n d d d d d M M M M M n μλλμλμμλ 程序代码: 1拉格朗日插值函数Lang.mfunction f=lang(X,Y,xi) %X 为已知数据的横坐标 %Y 为已知数据的纵坐标 %xi 插值点处的横坐标%f 求得的拉格朗日插值多项式的值 n=length(X); f=0; for i=1:n l=1; for j=1:i-1l=l.*(xi-X(j))/(X(i)-X(j)); end ; for j=i+1:nl=l.*(xi-X(j))/(X(i)-X(j)); end ;%拉格朗日基函数 f=f+l*Y(i); endfprintf('%d\n',f) return2 牛顿插值函数newton.mfunction f=newton(X,Y,xi) %X 为已知数据的横坐标 %Y 为已知数据的纵坐标%xi插值点处的横坐标%f求得的拉格朗日插值多项式的值n=length(X);newt=[X',Y'];%计算差商表for j=2:nfor i=n:-1:1if i>=jY(i)=(Y(i)-Y(i-1))/(X(i)-X(i-j+1));else Y(i)=0;endendnewt=[newt,Y'];end%计算牛顿插值f=newt(1,2);for i=2:nz=1;for k=1:i-1z=(xi-X(k))*z;endf=f+newt(i-1,i)*z;endfprintf('%d\n',f)return3三次样条插值第一类边界条件Threch.mfunction S=Threch1(X,Y,dy0,dyn,xi)% X为已知数据的横坐标%Y为已知数据的纵坐标%xi插值点处的横坐标%S求得的三次样条插值函数的值%dy0左端点处的一阶导数% dyn右端点处的一阶导数n=length(X)-1;d=zeros(n+1,1);h=zeros(1,n-1);f1=zeros(1,n-1);f2=zeros(1,n-2);for i=1:n%求函数的一阶差商h(i)=X(i+1)-X(i);f1(i)=(Y(i+1)-Y(i))/h(i);endfor i=2:n%求函数的二阶差商f2(i)=(f1(i)-f1(i-1))/(X(i+1)-X(i-1));d(i)=6*f2(i);endd(1)=6*(f1(1)-dy0)/h(1);d(n+1)=6*(dyn-f1(n-1))/h(n-1);%¸赋初值A=zeros(n+1,n+1);B=zeros(1,n-1);C=zeros(1,n-1);for i=1:n-1B(i)=h(i)/(h(i)+h(i+1));C(i)=1-B(i);endA(1,2)=1;A(n+1,n)=1;for i=1:n+1A(i,i)=2;endfor i=2:nA(i,i-1)=B(i-1);A(i,i+1)=C(i-1);endM=A\d;syms x;for i=1:nSx(i)=collect(Y(i)+(f1(i)-(M(i)/3+M(i+1)/6)*h(i))*(x-X(i))...+M(i)/2*(x-X(i))^2+(M(i+1)-M(i))/(6*h(i))*(x-X(i))^3);digits(4);Sx(i)=vpa(Sx(i));%三样条插值函数表达式endfor i=1:ndisp('S(x)=');fprintf('%s (%d,%d)\n',char(Sx(i)),X(i),X(i+1));endfor i=1:nif xi>=X(i)&&xi<=X(i+1)S=Y(i)+(f1(i)-(M(i)/3+M(i+1)/6)*h(i))*(xi-X(i))+M(i)/2*(xi-X(i))^2+(M(i+1)-M(i))/(6 *h(i))*(xi-X(i))^3;endenddisp('xi S');fprintf('%d,%d\n',xi,S);return4 三次样条插值第二类边界条件Threch2.mfunction [Sx]=Threch2(X,Y,d2y0,d2yn,xi)X为已知数据的横坐标%Y为已知数据的纵坐标%xi插值点处的横坐标%S求得的三次样条插值函数的值%d2y0左端点处的二阶导数% d2yn右端点处的二阶导数n=length(X)-1;d=zeros(n+1,1);h=zeros(1,n-1);f1=zeros(1,n-1);f2=zeros(1,n-2);for i=1:n%求一阶差商h(i)=X(i+1)-X(i);f1(i)=(Y(i+1)-Y(i))/h(i);endfor i=2:n%求二阶差商f2(i)=(f1(i)-f1(i-1))/(X(i+1)-X(i-1));d(i)=6*f2(i);endd(1)=2*d2y0;d(n+1)=2*d2yn;%赋初值A=zeros(n+1,n+1);B=zeros(1,n-1);C=zeros(1,n-1);for i=1:n-1B(i)=h(i)/(h(i)+h(i+1));C(i)=1-B(i);endA(1,2)=0;A(n+1,n)=0;for i=1:n+1A(i,i)=2;endfor i=2:nA(i,i-1)=B(i-1);A(i,i+1)=C(i-1);endM=A\d;syms x;for i=1:nSx(i)=collect(Y(i)+(f1(i)-(M(i)/3+M(i+1)/6)*h(i))*(x-X(i))... +M(i)/2*(x-X(i))^2+(M(i+1)-M(i))/(6*h(i))*(x-X(i))^3);digits(4);Sx(i)=vpa(Sx(i));endfor i=1:ndisp('S(x)=');fprintf('%s (%d,%d)\n',char(Sx(i)),X(i),X(i+1));endfor i=1:nif xi>=X(i)&&xi<=X(i+1)S(i)=Y(i)+(f1(i)-(M(i)/3+M(i+1)/6)*h(i))*(xi-X(i))+M(i)/2*(xi-X(i))^2+(M(i+1)-M(i)) /(6*h(i))*(xi-X(i))^3;endenddisp('xi S');fprintf('%d,%d\n',xi,S);return5插值节点处的插值结果main3.mclearclcX=[0.0,0.1,0.2,0.3,0.4];Y=[0.5000,0.5398,0.5793,0.6179,0.7554];xi=0.13;%xi=0.36;disp('xi=0.13');%disp('xi=0.36');disp('拉格朗日插值结果');lang(X,Y,xi);disp('牛顿插值结果');newton(X,Y,xi);disp('三次样条第一类边界条件插值结果');Threch1(X,Y,0.40,0.36,xi);%0.4,0.36分别为两端点处的一阶导数disp('三次样条第二类边界条件插值结果');Threch2(X,Y,0,-0.136,xi);%0,-0.136分别为两端点处的二阶导数6将多种插值函数即原函数图像画在同一张图上main2.mclearclcX=[0.0,0.1,0.2,0.3,0.4];Y=[0.5000,0.5398,0.5793,0.6179,0.7554];a=linspace(0,0.4,21);NUM=21;L=zeros(1,NUM);N=zeros(1,NUM);S=zeros(1,NUM);B=zeros(1,NUM);for i=1:NUMxi=a(i);L(i)=lang(X,Y,xi);% 拉格朗日插值N(i)=newton(X,Y,xi);%牛顿插值B(i)=normcdf(xi,0,1);%原函数S(i)=Threch1(X,Y,0.4,0.36,xi);%三次样条函数第一类边界条件endplot(a,B,'--r');hold on;plot(a,L,'b');hold on;plot(a,N,'r');hold on;plot(a,S,'r+');hold on;legend('原函数','拉格朗日插值','牛顿插值','三次样条插值',2);hold off7增加插值节点观察误差变化main4.mclear;clc;N=5;%4.5第一问Ini=zeros(1,1001);a=linspace(-1,1,1001);Ini=1./(1+25*a.^2);for i=1:3 %节点数量变化次数N=2*N;t=linspace(-1,1,N+1);%插值节点ft=1./(1+25*t.^2);%插值节点函数值val=linspace(-1,1,101);for j=1:101L(j)=lang(t,ft,val(j));S(j)=Threch1(t,ft,0.074,-0.074,val(j));%三样条第一类边界条件插值endplot(a,Ini,'k')%原函数图象hold onplot(val,L,'r')%拉格朗日插值函数图像hold onplot(val,S,'b')%三次样条插值函数图像str=sprintf('插值节点为%d时的插值效果',N);title(str);legend('原函数','拉格朗日插值','三次样条插值');%显示图例hold offfigureend8车门曲线main5.mclearclcX=[0,1,2,3,4,5,6,7,8,9,10];Y=[0.0,0.79,1.53,2.19,2.71,3.03,3.27,2.89,3.06,3.19,3.29]; dy0=0.8;dyn=0.2;n=length(X)-1;d=zeros(n+1,1);h=zeros(1,n-1);f1=zeros(1,n-1);f2=zeros(1,n-2);for i=1:nh(i)=X(i+1)-X(i);f1(i)=(Y(i+1)-Y(i))/h(i);endfor i=2:nf2(i)=(f1(i)-f1(i-1))/(X(i+1)-X(i-1));d(i)=6*f2(i);endd(1)=6*(f1(1)-dy0)/h(1);d(n+1)=6*(dyn-f1(n-1))/h(n-1); A=zeros(n+1,n+1);B=zeros(1,n-1);C=zeros(1,n-1);for i=1:n-1B(i)=h(i)/(h(i)+h(i+1));C(i)=1-B(i);endA(1,2)=1;A(n+1,n)=1;for i=1:n+1A(i,i)=2;endfor i=2:nA(i,i-1)=B(i-1);A(i,i+1)=C(i-1);endM=A\d;x=zeros(1,n);S=zeros(1,n);for i=1:nx(i)=X(i)+0.5;S(i)=Y(i)+(f1(i)-(M(i)/3+M(i+1)/6)*h(i))*(x(i)-X(i))+M(i)/2*(x(i)-X(i))^2+(M(i+1)-M (i))/(6*h(i))*(x(i)-X(i))^3;endplot(X,Y,'k'); hold on;plot(x,S,'o');title('三次样条插值效果图');legend('已知插值节点','三次样条插值');hold off实验结果:4.31计算插值节点处的函数值xi=0.13时Xi=0.36时2将多种插值函数即原函数图像画在同一张图上4.5.1增加插值节点观察误差变化从上面三张图可以看出增加插值节点并不能改善差之效果4.5.2 车门曲线(注:专业文档是经验性极强的领域,无法思考和涵盖全面,素材和资料部分来自网络,供参考。