旋转型灌装机任务书
- 格式:doc
- 大小:18.50 KB
- 文档页数:2
机械原理课程设计-旋转型灌装机设计贵州大学机械工程学院机械原理课程设计说明书题号11旋转型灌装机学院:机械工程专业:班姓名学号:指导导师:日期:目录一、机械原理课程设计任务书题号11 ......... - 3 -一、设计题目及原始数据............... - 4 -二、设计方案提示........................... - 5 -三、设计任务................................... - 5 -二、设计背景................................................... - 7 -三、方案的选择............................................... - 8 -3.1综述............................................................. - 8 -3.2选择设计方案..................................... - 8 -3.2.1、功能逻辑图和功能原理解图- 8 -3.2.2、功能原理的工艺过程分解. - 10 -3.2.3、机械系统运动转化功能图. - 21 -3.3方案确定........................................... - 21 -四、原动机选择............................................. - 24 -五、传动比分配............................................. - 24 -六、传动机构的设计..................................... - 24 -6.1减速器的设计................................... - 24 -6.2齿轮的设计....................................... - 25 -七、机械运动循环图..................................... - 28 -八、机构设计................................................. - 28 -8.1、凸轮设计计算及校核.................... - 28 -8.2、槽轮尺寸设计与分析.................... - 31 -九、整体评价................................................. - 35 -十、Pro/e建模分析....................................... - 36 - 十一、设计小结........................................... - 40 - 十二、参考文献............................................. - 41 -贵州大学机械工程学院机械原理课程设计任务书题号11旋转型灌装机一、设计题目及原始数据设计旋转型灌装机。
目录第一章设计任务 (3)§1-1 工作原理及工艺动作 (3)§1-2 设计要求及提示 (3)§1-3 设计任务要求 (3)第二章旋转型灌装机的工作原理及其功能原理 (4)§2-1旋转型灌装机工作原理 (4)§2-2 旋转型灌装机的功能分解图、执行机构动作分解图 (5)第三章旋转型灌装机机构运动总体方案 (16)§3-1 旋转型灌装机总体方案图(机构运动简图) (16)第四章工作循环图及运动转换功能图 (18)§4-1工作循环图 (18)§4.2绘制机械系统运动转换功能图 (19)§4-3用形态学矩阵法创建旋转型灌装机机械系统运动方案: (19)第五章旋转型灌装机各运动构件的设计选择与分析 (20)§5-1传动机构的选择: (20)§5-2减速机构的设计,选择与分析 (21)§5-3灌装机构的设计: (22)§5-4间歇运动机构的设计,分析 (26)§5-5传动齿轮,带轮,链轮的设计: (28)§5-6压盖封口机构的设计: (28)第六章设计总结与心得体会: (30)参考文献 (31)大学机械工程学院大学机械工程学院机械原理课程设计任务书题号5旋转型灌装机第一章设计任务1-1 工作原理及工艺动作设计旋转型灌装机。
在转动工作台上对包装容器(如玻璃瓶)连续灌装流体(如饮料、酒、冷霜等),转台有多工位停歇,以实现灌装、封口等工序。
为保证在这些工位上能够准确地灌装、封口,应有定位装置。
如图1中,工位1:输入空瓶;工位2:灌装;工位3:封口;工位4:输出包装好的容器。
该机采用电动机驱动,传动方式为机械传动。
1-2 设计要求及提示1234传送带固定工作台转台1.采用灌瓶泵灌装流体,泵固定在某工位的上方。
2.采用软木塞或金属冠盖封口,它们可由气泵吸附在压盖机构上,由压盖机构压入(或通过压盖模将瓶盖紧固在)瓶口。
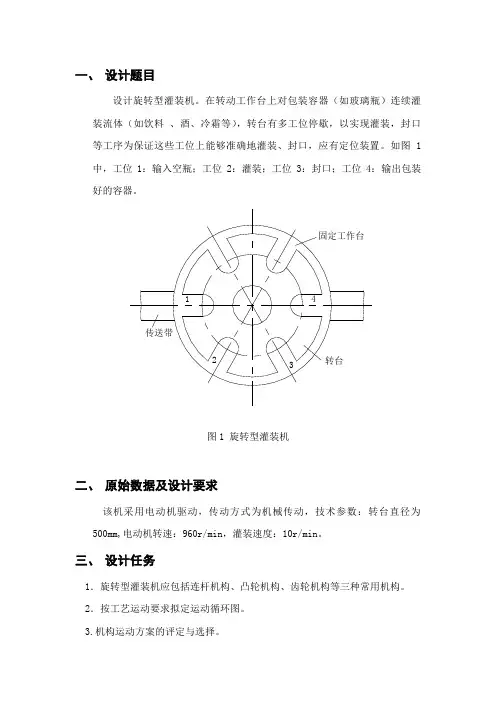
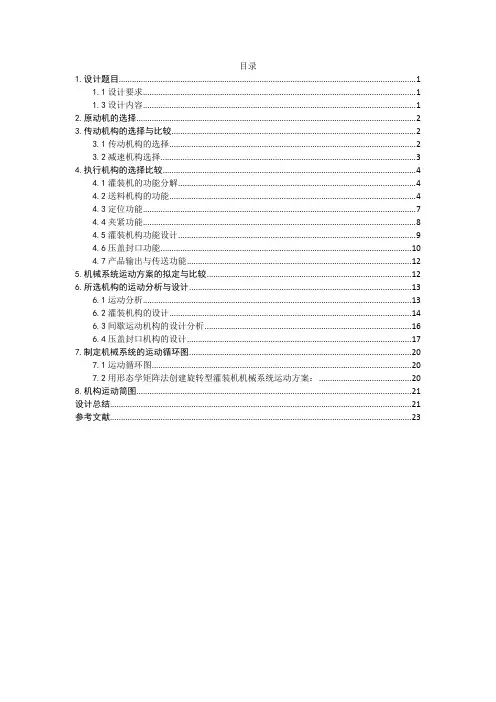
图1 旋转型灌装机二、原始数据及设计要求该机采用电动机驱动,传动方式为机械传动,技术参数:转台直径为500mm,电动机转速:960r/min,灌装速度:10r/min。
三、设计任务1.旋转型灌装机应包括连杆机构、凸轮机构、齿轮机构等三种常用机构。
2.按工艺运动要求拟定运动循环图。
3.机构运动方案的评定与选择。
4.设计传动系统并确定其传动比分配。
5.绘制旋转型灌浆机的运动方案简图。
6.凸轮的设计计算。
7.齿轮机构的设计计算。
8.对传动机构和执行机构进行运动尺寸综合。
9.编写设计计算说明书。
四、功能分析待灌瓶由传送系统(一般经洗瓶机由输送带输入)或人工送入灌装机进瓶机构,转台有多工位停歇,可实现灌装、封口等工序。
为保证在这些工位上能够准确地灌装、封口,应有定位装置。
我们将设计主要分成下几个步骤:1.输入空瓶:这个步骤主要通过传送带来完成,把空瓶输送到转台上使下个步骤能够顺利进行。
2.灌装:这个步骤主要通过灌瓶泵灌装流体,而泵固定在某工位的上方。
3.封口:用软木塞或者金属冠通过冲压对瓶口进行密封的过程。
4.输出包装好的容器:步骤基本同1,也是通过传送带来完成。
五、设计方案的拟定及最终确定以上4个步骤由于灌装和传送较为简单无须进行考虑,因此,旋转型灌装机运动方案设计重点考虑便在于转盘的间歇运动、灌装时灌嘴的定位、封口时的冲压过程,和实现这3个动作的机构的选型和设计问题。
(其中考虑到转盘旋转时工件的定位,固定工作台采用外环凸起形式)经小组成员研究讨论,下面拟定上述3个动作的实现方案:1.采用灌装泵灌装流体,泵固定在某工位的上方。
对于灌嘴的设计可以采用移动导杆机构等平面连杆机构或凸轮机构。
2.采用软木塞或金属冠盖封口,它们可以由气泵吸附在压盖机构上,由压盖机构压入(或通过压盖模将瓶盖紧固在瓶口)。
设计者只需设计作直线往复运动的压盖机构。
压盖机构可采用移动导杆机构等平面连杆机构或凸轮机构。
3.此外,需要设计间歇传动机构,以实现工作转台的间歇传动。
旋转型灌装机课程设计-旋转灌装机毕设一、课程设计目标通过本课程设计,学生应能掌握以下能力:1.理解旋转型灌装机的工作原理和构造特点;2.对旋转型灌装机的各个组成部件进行设计和选型;3.进行实际工程制作,掌握机械加工和装配技能;4.进行系统调试和运行,熟练掌握机器的操作和维护。
二、课程设计内容1.灌装机的工作原理和构造特点的学习:学生首先应该对旋转型灌装机的工作原理进行学习,了解其基本构造和工作方式。
2.灌装机的组成部件设计和选型:学生需要对灌装机的各个组成部件进行设计和选型,包括电机、减速器、传动装置、灌装头等。
学生应该根据工作任务和要求,对各个部件进行合理的设计和选型。
3.机械加工和装配:学生需要进行机械加工和装配工作,包括对零部件进行加工和装配,确保机器的正常运行。
4.系统调试和运行:学生应进行系统的调试和运行,确保机器的各项功能正常,并进行相关参数的调整和优化。
5.机器的操作和维护:学生需要学习机器的操作和维护,包括对机器的日常保养、故障排除和维修等工作。
三、参考教材和实验设备参考教材包括《灌装机械设计与实验》和《机械制图与AutoCAD设计》等相关教材。
实验设备包括旋转灌装机模型、机械加工工具、电气元件等。
四、课程设计进度安排本课程设计安排为5周,每周需要进行相关实践工作。
第1周:学习旋转型灌装机的工作原理和构造特点,理解课程设计的目标和要求。
第2周:对灌装机的组成部件进行设计和选型,包括电机、减速器、传动装置、灌装头等。
第3周:进行机械加工和装配工作,包括对零部件进行加工和装配。
第4周:进行系统的调试和运行,确保机器的各项功能正常,并进行相关参数的调整和优化。
第5周:学习机器的操作和维护,包括对机器的日常保养、故障排除和维修等工作。
五、课程设计评价学生的课程设计成绩主要根据以下几个方面进行评价:1.设计方案的合理性和创新性;2.机械加工和装配的准确性和质量;3.系统调试和运行的效果和稳定性;4.机器操作和维护的规范性和熟练程度。
![旋转型灌装机-机械原理课程设计[优秀]](https://uimg.taocdn.com/b5a4e6820b4c2e3f5627636a.webp)
课程设计说明书设计题目:旋转型灌装机专业: 车辆工程班级:设计人: 学号:山东科技大学年月日课程设计任务书学院机械电子工程学院专业车辆工程班级姓名一、课程设计题目:旋转型灌装机二、课程设计主要参考资料[1] 课程设计指导书[2] 孙桓,陈作模.机械原理[米].7版. 北京:高等教育出版社,2006[3]杨晓辉.简明机械使用手册[米].北京:高等科学出版社,2006[4] 唐亚楠,罗浩,陈兴来等.机械原理同步辅导习题全解[米].北京:中国矿业大学出版社.2010三、课程设计应解决主要问题(1)通过机构设计满足机构的运动要求(2)优化结构设计,提高可行性以及机构工作的稳定性(3) 通过不完全齿轮和凸轮实现转台的间歇运动和压盖动作四、课程设计相关附件(如:图纸、软件等)(1)A3结构原理图(2)课程设计说明书一份(3) 电子稿一份五、任务发出日期:2011.07.04 任务完成日期:2011.07.08指导教师签字: 系主任签字:指导教师对课程设计的评语指导教师签字:年月日目录1 课程设计任务 (1)1.1设计题目 (1)1.2设计要求 (1)1.3原始数据 (1)2机械系统方案设计 (3)2.1功能描述 (3)2.2机械系统运动功能系统图 (3)2.3系统方案拟定与比较 (3)3 系统尺度综合 (6)4 系统运动学分析 (9)5系统动力学分析 (14)6 课程设计总结 (12)参考文献 (13)1 课程设计任务1.1设计题目旋转型灌装机1.2设计要求.为保证在输入空瓶;0.5s.1.3原始数据表7 旋转型灌装机技术参数2机械系统方案设计2.1功能描述在转动工作台上对包装容器(如玻璃瓶)连续灌装流体(如饮料、酒、冷霜等),转台有多工位停歇,以实现灌装、封口等工序.实现的功能是转台的停歇,压盖,在停歇过程中实现压盖的动作.输送线上的待灌瓶子等间距放置,在传送带上进行直线输送,待灌瓶子送至1处开始随工作台转动1.5秒达到2处时停止0.5秒,由灌装设备装被装物.然后被送至下一个工位进行包装.原动机转速为960 r/米in,实现工作台的转速为5 r/米in.2.2机械系统运动分析原动机通过皮带和减速器减速达到一定的转速后,用不完全齿轮实现转台的间歇运动,用凸轮机构实现压盖的功能图2 机械系统工作循环图2.3系统方案拟定与比较2.3.4方案比较为了实现转盘的间歇运动机构,比较槽轮机构和不完全齿轮之间的优缺点;因为:1)与其他间歇运动机构相比,不完全齿轮机构结构简单.2)主动轮转动一周时,其从动轮的停歇次数,每次停歇的时间和每次传动的角度等变化范围大,因而设计灵活.3)而且它一般适用于低速、轻载的场合,并且主动轮和从动轮不能互换.所以在这里选择不完全齿轮来实现转盘的间歇运动.为了实现封口的压盖机构,比较凸轮机构和连杆机构之间的优缺点:1)凸轮机构比连杆机构更容易设计.2)结构简单,容易实现.所以,在这里凸轮机构比连杆机构更适用综上可知:转盘的间歇运动机构,我们选择不完全齿轮机构;封口的冲压机构,,我们选择凸轮机构.z23机械系统尺度综合3.1 不完全齿轮由于转台的转速是5转每分,每转60度需时2秒,其中间歇设为0.5秒,实际转速为1.5秒转动60度,左边为不完全齿轮,右边为标准齿轮,左边齿轮转一圈,右边齿轮转动60°.具体参数为:z 左=6,z 右=36,米=5米米,α=20°,θ左=60°.θ右 =270°中心距:a=米(z 左*360°/θ左+z 7)/2=5*(6*360/270+36)/2=110米米分度圆半径:r 右= 米z 右=90米米 r 左=a- r 右=20米米基圆半径: r b 右=a*cos α/2=180*cos20°/2=84.6米米 r b 左=18.8米米 齿顶圆半径: r a 右=(z右+2ha*)*米/2=(36+2*1)*5/2=95米米 r a 左=r 左+ha*米=25米米齿顶圆压力角:αa 右=arccos 【z 右cos α/(z 右+2ha*)】=acrcos【36cos20°/(36+2*1)】=27° αa 左=arccos 【z 左*360°/θ左 cos α/(z 左*360°/θ左+2ha*)】=41.25基圆齿距:P b 左=P b 右=π米cos α=3.14*5*cos 20°=14.76米米3.2 传动齿轮的设计3.2.1 皮带传动,i=2;3.2.2第一齿轮传动z1=20,d1=100米米,n1=480r/米in;Z2=80 d2=400米米,n2=120r/米in;i 12=4;第二级齿轮传动 z 2'=20,d2'=100米米,n2'=120r/米in;Z3=80 d3=400米米,n2=30r/米in;i 2'3=4;3.3 凸轮设计任务要求所推瓶子的直径为80米米,为了工作安全,令推杆的升程h 0=60米米,根据优化后的工作循环图可知凸轮的升程角δo =60°,回程角δ‘o =60°,推杆的运动规律我们采用了一次多项式运动规律,最后得到:推杆的升程运动方程为 ⎪⎩⎪⎨⎧===0a /60/60s o o δωυδδ推杆的回程运动方程为 ⎪⎪⎩⎪⎪⎨⎧=-=-=0a /60)/1(60s 'o o 'δωυδδ推杆的运动方程确定后,再确定凸轮的尺寸.根据基圆半径的计算公式:()[][]22o tan /e d /ds r e s +--≥αδ,其中e=0,α取许用压力角[α]=30°,算得r o ≥99米米,我们最终取得r o =100米米,然后根据推杆升程h 0=60米米,以及升程角和回程角,就可确定出凸轮的形状,如图13所示.图13所示凸轮位置即为与曲柄滑块相配合的起始位置,以此位置建立xoy坐标系.根据此坐标系可以得出推杆行程的具体方程(θ为主轴在一个周期内转过的角度):θ)h1=50(1-θ/50°) 米米(0°︒≤50≤θ250o)h2= 0 (50°<≤θ) h3=60(θ-250︒)/60°米米(250°︒<250≤θ)h4=0 (310°︒≤<350θ) h5=60[1-(θ-350°)/60°] 米米(350°︒<360≤图13 凸轮机构4 机械系统运动学分析根据图13所做xoy 坐标系以及推杆的运动方程h ,就可得出凸轮理论轮廓曲线方程(θ为主轴在一个周期内转过的角度):()()()⎪⎩⎪⎨⎧+=︒≤≤︒+-=θθθcos h 100y 500sin h 100x 11 ()⎪⎩⎪⎨⎧=︒≤<︒-=θθθcos 100y 50250sin 100x ()()()⎪⎩⎪⎨⎧+=︒≤<︒+-=θθθcos h 100y 310250sin h 100x 33 ()()()⎪⎩⎪⎨⎧+=︒≤<︒+-=θθθcos h 100y 350310sin h 100x 00 ()()()⎪⎩⎪⎨⎧+=︒≤<︒+-=θθθcos h 100y 360350sin h 100x 55 为了使凸轮和推杆的配合更加平稳,避免出现剧烈跳动,把推杆的底部设计成滚子.加上滚子后,凸轮的实际轮廓曲线应当在其理论轮廓曲线上加以修正..5课程设计总结本次课程设计是我进入大学以来第一次对自己所学知识和实践能力的综合检测,使我受到许多启发.首先,通过此次课程设计,是我对所学的知识有了一个更加深刻的影响和一个完整的体系,培养了自己分析和解决与本课程有关的具体机械所涉及的实际问题的能力.对平面连杆机构、摇杆、齿轮、槽轮等一些课本上独立的知识有了更加深刻的理解和联系,要使这些基本结构能组成功能强大的各种机构,我的学习还有待于更深入.其次,这次课程设计过程中,使我了解到团队的力量是无限的.与同学们激烈讨论,团结合作,共同努力,最终完美的实现了机构的设计,是本次课程设计中珍贵的体验.此外,希望我们能有更多的机会参与课程设计,提高自主创新能力.这次课程设计我投入了很多的时间和精力,我觉得这是完全值得的.在我看来,课程设计比考试更能检测出学习的深度和精度.独立思考,勇于创新,动手能力都得到了进一步的加强.最后,衷心感谢曹冲振老师这个学期的悉心教导与鼓励,在课堂上为我们补充了很多知识,带领我们走进了奇妙的机械世界.在曹老师的耐心指导下,我们才能完成了这次的课程设计,并从中学到了更多的知识.参考文献[1] 课程设计指导书[2] 孙桓,陈作模.机械原理[米].7版. 北京:高等教育出版社,2006[3]杨晓辉.简明机械使用手册[米].北京:高等科学出版社,2006[4] 唐亚楠,罗浩,陈兴来等.机械原理同步辅导习题全解[米].北京:中国矿业大学出版社.2010。
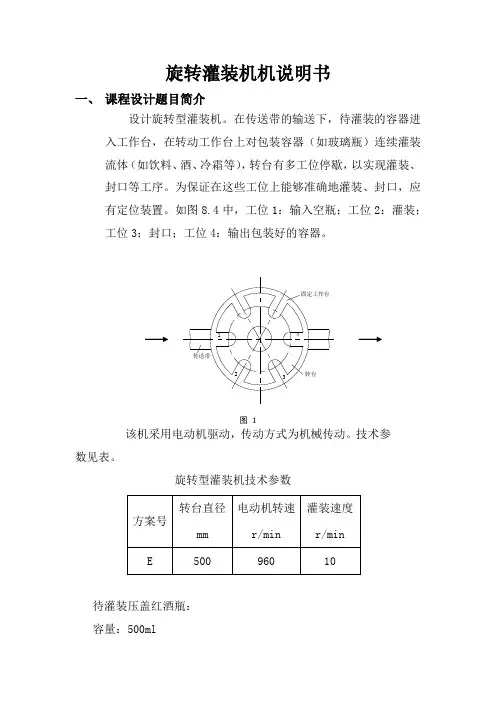
旋转灌装机机说明书一、课程设计题目简介设计旋转型灌装机。
在传送带的输送下,待灌装的容器进入工作台,在转动工作台上对包装容器(如玻璃瓶)连续灌装流体(如饮料、酒、冷霜等),转台有多工位停歇,以实现灌装、图1该机采用电动机驱动,传动方式为机械传动。
技术参数见表。
旋转型灌装机技术参数待灌装压盖红酒瓶:容量:500ml高:300mm底直径:60mm瓶口外直径:29mm;瓶口内直径:20mm瓶颈长:75mm瓶塞:高40mm,上底25mm,下底18mm二、功能及装置1、输入输出设备1.1 方案一:连杆拨动传送装置如图2,输入时,将一个个待灌装、封口的红酒瓶等距置于传送台上,连杆机构在主动杆的转动带动下,每一个周期齿条上升至传送台高度通过拨齿的前进运动将红酒瓶向前方拨动一个齿距长度,回程之前齿条先向下运动,避免回程时再把红酒瓶回拨。
输出时,当红酒瓶灌装、封口完成后到达输出位置时,此装置与输入同理,将红酒瓶从工作台上拨出至传送台上,实现输出。
优点:间歇步进。
缺点:需要等距放置;要求太过精确;拨动红酒瓶时会产生刚性冲击,不平稳。
图21.2 方案二:履带传送带装置如图3,用一个履带传送带装置通过工作台同时作为输入输出装置。
待灌装、封口的红酒瓶从输入端放上传送带,传送带上容器以一字排列的形式传送过来进入工作台经过灌装、封口后从工作台输出位直接传送出来,实现成品的输出。
优点:工作难度低,连续不间断。
图3由于加工品是红酒瓶,易损,则相比方案一,方案二的履带传送带更加平稳连续,成本底,操作难易度低,故选择方案二为输入输出的最终装置。
2、工作台固定工作台为两个半圆,中间相隔间距为传送带宽度,供传送带通过,这样可以使红酒瓶输入时直接进入旋转工作台1号位,经过灌装封口后到达4号位下传送带直接将其输出。
这样不需要另外增加拨杆将红酒瓶拨入拨出旋转工作台。
当旋转工作台卡槽进给深度只容许一个红酒瓶进入时,则红酒瓶输入可以不必遵守等间距原则,即使间距小或无间距,第二个红酒瓶也无法进入工作台,使得传送带可以一直连续运转。
机械原理课程设计说明书课题名称:旋转型灌装机专业班级:11级机械卓越班学生姓名:学生学号:指导老师:目录一、题目 (2)1、设计题目及原始数据 (2)2、设计方案提示 (2)3、设计任务 (3)二、设计方案 (3)1、工艺分解 (4)<1>. 减速装置 (4)<2>.容器输入输出装置 (5)<3>.旋转工作台多工位间歇转动功能 (6)<4>.各个工位的精确定位功能 (6)<5>.对容器的灌装封口压力结构(凸轮机构) (7)<6>.送盖,吸盖,换盖装置 (8)2、运动方案总图 (10)3、运动循环图 (11)三、尺寸设计 (12)1、凸轮设计 (12)2、槽轮设计 (13)3、齿轮设计 (14)4、其他机构尺寸设计 (15)四、心得体会 (15)五、参考资料 (16)机械原理课程设计任务书位2该机采用电动机驱动,传动方式为机械传动。
技术参数见下表。
旋转型灌装机技术参数表 2、设计方案提示<1>.采用灌瓶泵灌装流体,泵固定在某工位的上方。
<2>.采用软木塞或金属冠盖封口,它们可由气泵吸附在压盖机构上,由压盖机构压入(或通过压盖模将瓶盖紧固在)瓶口。
设计者只需设计作直线往复运动的压盖机构。
压盖机构可采用移动导杆机构等平面连杆机构或凸轮机构。
<3>.此外,需要设计间歇传动机构,以实现工作转台间歇传动。
为保证停歇可靠,还应有定位(锁紧)机构。
间歇机构可采用槽轮机构、不完全齿轮机构等。
定位(锁紧)机构可采用凸轮机构等。
3、设计任务<1>.旋转型灌装机应包括连杆机构、凸轮机构、齿轮机构等三种常用机构;<2>.设计传动系统并确定其传动比分配,并在图纸上画出传动系统图;<3>.图纸上画出旋转型灌装机的运动方案简图,并用运动循环图分配各机构运动节拍;<4>确定连杆机构各个杆件尺寸,进行速度、加速度分析,绘出运动线图<5>.凸轮机构的设计计算。
机械原理课程设计旋转型灌装机旋转型灌装机是一种常用于食品、饮料、化妆品等行业的包装设备,其主要功能是将液体、粉末或颗粒物料按照一定的容量灌装到容器中。
本文将就机械原理课程设计的旋转型灌装机进行详细介绍。
一、设计要求1.灌装速度:1000瓶/小时;2.灌装精度:±1%;3. 适用于不同规格的容器,容器直径范围:40-100mm,容器高度范围:80-200mm;4.采用PLC控制系统,具备自动化操作功能;5.设计结构紧凑,易于清洁和维护。
二、设计思路1.采用旋转式结构,将整个灌装过程分为定位、灌装、旋盖和出瓶四个阶段;2.通过传感器检测容器的到位情况,控制灌装和旋盖动作;3.采用伺服驱动系统,控制灌装机的旋转和灌装速度;4.通过气动系统控制灌装机的灌装和旋盖动作;5.采用PLC控制系统,实现自动化操作和灌装精度控制。
三、设计方案1.结构设计:灌装机采用旋转式结构,主要由机座、旋转盘、灌装头、旋盖头和输送带组成。
旋转盘上设置有容器定位装置,通过气缸控制容器的定位和释放。
灌装头和旋盖头分别采用气动驱动,通过气缸控制灌装和旋盖动作。
输送带用于输送容器,在灌装和旋盖过程中保持连续运动。
2.控制系统设计:采用PLC控制系统,通过传感器检测容器的到位情况,控制灌装和旋盖动作。
PLC控制系统可以实现自动运行、停机、手动操作等功能。
通过调节PLC参数,可以控制灌装机的灌装速度和灌装精度。
伺服驱动系统用于控制灌装机的旋转和灌装速度,可以实现精确的控制。
气动系统用于控制灌装和旋盖动作,通过气缸控制动作的快慢和力度。
3.安全保护设计:在设计过程中,要考虑到灌装机的安全性。
设置紧急停机按钮和安全门开关,以确保操作人员的安全。
在灌装和旋盖过程中,通过传感器检测容器的位置和动作,避免发生意外。
四、结论本文设计了一种旋转型灌装机,通过PLC控制系统、伺服驱动系统和气动系统实现了自动化操作和灌装精度控制。
该设计满足了1000瓶/小时的灌装速度要求,具备灌装精度高、适用范围广、结构紧凑、易于清洁和维护等优点。
目录1.设计题目 (1)1.1设计要求 (1)1.3设计内容 (1)2.原动机的选择 (2)3.传动机构的选择与比较 (2)3.1传动机构的选择 (2)3.2减速机构选择 (3)4.执行机构的选择比较 (4)4.1灌装机的功能分解 (4)4.2送料机构的功能 (4)4.3定位功能 (7)4.4夹紧功能 (8)4.5灌装机构功能设计 (9)4.6压盖封口功能 (10)4.7产品输出与传送功能 (12)5.机械系统运动方案的拟定与比较 (12)6.所选机构的运动分析与设计 (13)6.1运动分析 (13)6.2灌装机构的设计 (14)6.3间歇运动机构的设计分析 (16)6.4压盖封口机构的设计 (17)7.制定机械系统的运动循环图 (20)7.1运动循环图 (20)7.2用形态学矩阵法创建旋转型灌装机机械系统运动方案: (20)8.机构运动简图 (21)设计总结 (21)参考文献 (23)1.设计题目1.1设计要求设计旋转型灌装机。
在转动工作台上对包装容器(如玻璃瓶)连续灌装流体(如饮料、酒、冷霜等),转台有多工位停歇,以实现灌装、封口等工序。
为保证在这些工位上能够准确地灌装、封口,应有定位装置。
如下图所示,工位1:输入空瓶;工位2:灌装;工位3:封口;工位4:输出包装好的容器。
图1.1旋转型灌装机工位示意图1.2原始数据转台直径/mm 电动机转速(r/min) 灌装速度(r/min)500 720 101.3设计内容(1)根据给定的原始数据和工艺要求,构思并选定机构方案;(2)设计上述各机构,根据选定的方案设计各机构(连杆机构、凸轮机构、齿轮机构等),并进行运动分析;(3)根据上面求得的尺寸,按比例画出机构的运动简图及运动循环图;计算自由度,拆分杆组,判定机构级别;(4)编写设计计算说明书。
2.原动机的选择选用720r/min电动机驱动。
转速较高,需要减速机构降低速度供执行机构使用。
3.传动机构的选择与比较3.1传动机构的选择机械的传动机构,是将动力源所提供的运动的方式、方向或速度加以定向的改变,从而被人们有目的地加以利用。
实用文档学号********成绩课程设计说明书系别机电工程系专业机械设计制造及其自动化方向无课程名称《机械设计(二)课程设计》学号 ********姓名蔡铁根指导教师张恩光题目名称旋转型灌装机设计时间 2012年9-12月2012 年 12 月 8 日一.设计任务书及工作要求 (3)1.1设计题目 (3)1.2工作原理及工艺过程 (3)1.3原始数据及设计要求 (3)1.4设计方案提示 (3)1.5设计任务 (3)二.原动机选择 (4)三.传动比分配 (4)四.机构的选择与比较 (4)4.1传动机构的选择与比较 (4)4.2执行机构的选择与比较 (6)五.机械系统运动方案的拟订与评价 (8)5.1 综述 (8)5.2设计方案 (8)5.2.1 设计方案I (8)5.2.2 设计方案II (8)5.2.3 设计方案III (9)5.2.4比较、选择设计方案 (10)六.机械系统的运动循环图 (10)七.执行机构的运动分析及设计 (10)7.1凸轮结构的设计分析 (10)7.1.1凸轮机构运动分析线图 (13)7.2曲柄滑块机构的设计分析 (14)7.2.1连杆机构的尺寸参数设计 (14)7.2.2曲柄滑块机构的三维模型设计 (15)7.2.3 曲柄滑块的运动分析线图 (15)7.3 间歇机构的设计 (16)八.设计感想 (18)九.主要零件附图 (18)十.主要参考资料 (19)1.11.2(如饮料等)封口等工序。
入空瓶;工位1.3(1)转台直径:500~600mm。
附图(2)灌装机的生产率:10瓶/min。
(3)驱动电机:功率N=1.2kW,转速n=1440r/min。
1.4设计方案提示(1)采用泵来灌装流体,泵固定在灌装工位的上方。
(2)采用软木塞或金属冠盖封口,它们可由气泵吸附在压盖机构上,由压盖机构压入或通过压盖模将瓶盖紧固在瓶口。
设计者只需设计作直线往复运动的压盖机构。
压盖机构可采用移动导杆机构等平面连杆机构或凸轮机构。
课程设计课程名称:机械原理课程设计学院:机械学院专业:机电一体化姓名:孙耀平学号:080803110280 年级:083 任课教师:余述凡2011年1月14日目录:一设计任务书及工作要求 (2)二设计机构的工作原理 (4)三功能分解图、执行机构动作分解图 (5)四运动方案的选择与比较 (5)五机构运动总体方案图 (7)六工作循环图 (10)七执行机构的设计过程 (13)八机构运动分析计算机辅助设计流程框图 (13)九程序清单 (16)十运动线图 (24)位3:封口;工位4:输出包装好的容器。
该机采用电动机驱动,传动方式为机械传动。
技术参数见下表。
旋转型灌装机技术参数表二、设计方案提示1.采用灌瓶泵灌装流体,泵固定在某工位的上方。
2.采用软木塞或金属冠盖封口,它们可由气泵吸附在压盖机构上,由压盖机构压入(或通过压盖模将瓶盖紧固在)瓶口。
设计者只需设计作直线往复运动的压盖机构。
压盖机构可采用移动导杆机构等平面连杆机构或凸轮机构。
3.此外,需要设计间歇传动机构,以实现工作转台间歇传动。
为保证停歇可靠,还应有定位(锁紧)机构。
间歇机构可采用槽轮机构、不完全齿轮机构等。
定位(锁紧)机构可采用凸轮机构等。
三、设计任务1.旋转型灌装机应包括连杆机构、凸轮机构、齿轮机构等三种常用机构;2.设计传动系统并确定其传动比分配,并在图纸上画出传动系统图;3.图纸上画出旋转型灌装机的运动方案简图,并用运动循环图分配各机构运动节拍;4.电算法对连杆机构进行速度、加速度分析,绘出运动线图。
图解法或解析法设计平面连杆机构;5.凸轮机构的设计计算。
按凸轮机构的工作要求选择从动件的运动规律,确定基圆半径,校核最大压力角与最小曲率半径。
对盘状凸轮要用电算法计算出理论廓线、实际廓线值。
画出从动件运动规律线图及凸轮廓线图;6.齿轮机构的设计计算;7.编写设计计算说明书;第二部分设计机构的工作原理一、各机构功能原理设计①送料功能原理分析此机构的主要部分为传送圆盘,圆盘上有三个缺口,用以卡紧瓶子,其转速为10r/min,每转1一圈用时6s正好与转台工位转换时间相同。
110推 介Design 旋转型灌装机运动方案设计文/万爽 北京林业大学工学院车辆工程专业摘要:旋转灌装机在转动工作台上对包装容器(如玻璃瓶)连续灌装流体(如饮料、酒、冷霜等),转台有多工位停歇,以实现灌装、封口等工序。
所以应采用灌瓶泵灌装流体,并且使泵固定在某工位的上方。
采用软木塞或金属冠盖封口,它们可由气泵吸附在压盖机构上,由压盖机构压入(或通过压盖模将瓶盖紧固在)瓶口。
压盖机构可采用移动导杆机构等平面连杆机构或凸轮机构。
此外,需要设计间歇传动机构,以实现工作转台间歇传动。
为保证停歇可靠,还应有定位(锁紧)机构。
关键词:旋转型灌装机 运动 参数旋转型灌装机也可称为回转型灌装机,一般采用连续式灌注形式,即包装容器在运行中自动完成灌注动作。
由于灌装过程中包装容器沿圆周方向作等速回转运动,运动中同时完成灌装和封盖操作,因此旋转型灌装机连续生产,自动化程度高、占地少、生产能力大,生产效率较高;但这类灌装机结构复杂、制造较麻烦。
各种类型的液体物料(包括含气液体和不含气液体,低黏度、中等黏度和高黏度的液体)均可以选用合适的旋转型灌装机进行灌装。
设计旋转型灌装机。
在转动工作台上对包装容器(如玻璃瓶)连续灌装流体(如饮料 、酒、冷霜等),转台有多工位停歇,以实现灌装,封口等工序为保证这些工位上能够准确地灌装、封口,应有定位装置。
一、初始参数该机采用电动机驱动,传动方式为机械传动。
技术参数见表1。
表1 旋转型灌装机技术参数二、运动方案用蜗轮蜗杆减速,用槽轮机构实现间歇运动,然后利用凸轮进行间歇输液运动,最后采用曲柄滑块机构压盖。
涡轮蜗杆减速装置传动平稳,啮合冲击小;槽轮间歇运动机构结构简单,便于加工,机械效率高,并能平稳的实现间歇转位。
如图所示:三、运动循环图四、凸轮机构设计计算1.凸轮的运动规律由于运动需要,在凸轮的一个运动周期内,凸轮有1/3周期处于近修止,且凸轮的行程是70mm。
凸轮的轮廓曲线:要求凸轮在退程和回程的过程中,等加速等减速运动。
旋转型灌装机 课程设计一、课程目标知识目标:1. 学生能理解旋转型灌装机的结构组成和工作原理,掌握相关术语及概念。
2. 学生能描述旋转型灌装机的操作流程,了解其在中小学物理课程中的应用。
3. 学生掌握旋转型灌装机涉及到的物理知识,如力学、流体力学等。
技能目标:1. 学生能通过观察、操作旋转型灌装机,提高动手实践能力。
2. 学生能运用物理知识分析旋转型灌装机的工作过程,培养问题解决能力。
3. 学生具备团队协作能力,能在小组合作中共同完成旋转型灌装机的操作和调试。
情感态度价值观目标:1. 学生培养对物理学科的兴趣和热情,增强学习动力。
2. 学生通过实践操作,认识到科技在生活中的重要性,提高科技创新意识。
3. 学生在团队合作中,学会尊重他人,培养良好的沟通能力和团队精神。
课程性质:本课程为物理学科实践教学课程,结合实际旋转型灌装机设备,让学生在实践中学习物理知识。
学生特点:六年级学生具备一定的物理基础知识和动手能力,好奇心强,善于观察和思考。
教学要求:教师需结合学生特点,以实践操作为主,引导学生主动探究,注重培养学生的动手能力和问题解决能力。
在教学过程中,关注学生的情感态度价值观的培养,使学生在掌握知识技能的同时,形成良好的学习态度和价值观。
通过分解课程目标为具体的学习成果,为后续教学设计和评估提供依据。
二、教学内容依据课程目标,本章节教学内容主要包括以下几部分:1. 旋转型灌装机的结构与原理:介绍旋转型灌装机的各部分组成、工作原理及其在中小学物理课程中的应用。
- 教材章节:第五章《简单机械》第三节《旋转与传动》- 内容列举:旋转型灌装机的结构、工作原理、相关物理概念。
2. 旋转型灌装机的操作流程:讲解旋转型灌装机的操作步骤,使学生了解其实际应用。
- 教材章节:第六章《实践活动》第一节《实践活动的设计与实施》- 内容列举:旋转型灌装机的操作步骤、注意事项。
3. 物理知识在旋转型灌装机中的应用:分析旋转型灌装机涉及到的物理知识,如力学、流体力学等。
机械原理课程设计说明书设计课题:旋转型灌装机动力工程与过程装备系过程装备与动力工程专业设计者指导老师陶峰2 0 0 8 年0 7 月03 日旋转型灌装机设计要求设计旋转型灌装机,在转动工作台上对容器连续灌装流体,转台要有多工位停歇,以实现灌装,封口等工序。
同时设计定位装置用用来保证这些工位上能够准确地灌装,封口。
如图4.1所示,工位1:输入空瓶;工位2:灌装;工位3:封口;工位4:输出灌装好的容器。
该机采用电动机驱动,传动方式为机械传动,其主要参数如下转台直径/mm 电动机转速/(r/min)灌装转速/(r/min)A 600 1440 10B 550 1440 12C 500 960 10功能分解本机器的功能是实现流体自动灌装,容器的输入与输出在一条传送带上进行,其中经由一个可进行停歇运动的旋转工作台,并且经过工作台的旋转使得工作槽口旋转两次工作角度进行灌装以及压紧。
容器输送至工作台的槽口中,通过夹紧装置夹紧后通过它来使得输入的容器可以便于进行容器的灌装,压盖等工序。
其运动功能可分解为如下几个工艺动作:1.输入空瓶容器经由传送带进入旋转工作台的槽口之中,并且由槽口处的夹紧装置进行夹紧,停止前进。
2.灌装旋转工作台旋转一个工作角度(本设计为60°),带有容器的槽口在其工位上方由灌瓶泵向容器中灌注流体,泵由一凸轮机构控制其开关。
3.封口灌注后再旋转一个工作角度,采用软木塞或金属瓶盖进行封口,由一凸轮机构控制导杆做直线往复运动,由导杆将瓶盖或软木塞压入瓶口。
4.输出灌装好的容器压盖完成后再旋转一个工作角度,将灌装并且压紧好的容器经由传送带输出。
机构选用利用设计目录,并根据技术、经济以及相容性的要求,确定几个重要工艺动作的的执行构件所要用的执行机构,已分别实现其不同功能工作台旋转(功能)——圆周停歇运动(工艺动作)——齿轮机构----槽轮机构(执行机构)灌装——直线往复停歇运动——凸轮机构压紧——直线往复停歇运动——凸轮机构本小组选用A组参数机构设计根据设计要求,转动工作台应进行间歇运动,机构中必须要设置可以进行停歇运动的装置与工作台相连接。
《机械原理》课程设计任务书学生姓名:专业班级:一、题目:旋转型灌装机设计旋转型灌装机。
在转动工作台上对包装容器(如玻璃瓶)连续灌装流体(如饮料、酒、冷霜等),转台有多工位停歇,以实现灌装、封口等工序。
为保证在这些工位上能够准确地灌装、封口,应有定位装置。
如图中,工位1:输入空瓶;工位2:灌装;工位3:封口;工位4:输出包装好的容器。
二、初始条件该机采用电动机驱动,传动方式为机械传动。
技术参数见表1。
三、设计任务及要求1. 旋转型灌装机一般应包括连杆机构、凸轮机构、齿轮机构等三种常用机构。
至少设计出三种能实现该机器运动形式要求的机构,绘制所选机构的机构示意图(绘制在说明书上),比较其优缺点,并最终选出一个自己认为最合适的机构进行机构综合设计,绘制出其机构运动简图。
2. 设计传动系统并确定其传动比分配(皮带传动传动比i ≈ 2 ,每级齿轮传动传动比i ≤ 7.5 )。
3. 图纸上画出旋转型灌装机的传动系统方案图和工作循环图。
4. 图纸上画凸轮机构设计图(包括位移曲线、凸轮廓线和从动件的初始位置);要求确定运动规律,选择基圆半径,校核最大压力角与最小曲率半径,确定凸轮廓线。
5. 设计计算其中一对齿轮机构。
6. 同一小组内,每人至少有一种与别人不一样的机构设计方案。
7. 以上所要求绘制的图形均绘制在一号图纸。
8. 编写设计计算说明书(15page以上)。
四、设计提示1. 采用灌瓶泵灌装流体,泵固定在某工位的上方。
2. 采用软木塞或金属冠盖封口,它们可由气泵吸附在压盖机构上,由压盖机构压入(或通过压盖模将瓶盖紧固在)瓶口。
设计者只需设计作直线往复运动的压盖机构。
压盖机构可采用移动导杆机构等平面连杆机构或凸轮机构。
3. 此外,需要设计间歇传动机构,以实现工作转台间歇传动。
为保证停歇可靠,还应有定位(锁紧)机构。
间歇机构可采用槽轮机构、不完全齿轮机构等。
定位(锁紧)机构可采用凸轮机构等。
五、时间安排。
课程设计旋转型罐装机一、课程目标知识目标:1. 学生能理解旋转型罐装机的结构组成及其工作原理;2. 学生能掌握旋转型罐装机在工业生产中的应用及其优势;3. 学生能描述旋转型罐装机涉及的物理力学原理,如转动惯量、摩擦力等。
技能目标:1. 学生能够运用所学的知识,分析旋转型罐装机的运作过程,提出优化方案;2. 学生能够通过小组合作,设计并制作一个简易的旋转型罐装机模型;3. 学生能够运用科学探究方法,对旋转型罐装机的性能进行测试和评估。
情感态度价值观目标:1. 学生培养对机械设计及自动化技术的兴趣,提高创新意识和实践能力;2. 学生通过小组合作,培养团队协作精神,增强沟通能力;3. 学生认识到科技发展对工业生产的促进作用,增强对国家科技创新战略的理解和支持。
课程性质:本课程为实践性强的综合设计课程,以物理、工程技术等学科知识为基础,培养学生动手操作、创新设计的能力。
学生特点:六年级学生具备一定的物理知识和动手能力,对新鲜事物充满好奇心,喜欢动手实践。
教学要求:结合学生特点,注重理论联系实际,以学生为主体,鼓励学生自主探究、合作学习,提高解决问题的能力。
在教学过程中,关注学生的个体差异,给予个性化指导。
通过课程学习,使学生达到预设的知识、技能和情感态度价值观目标。
二、教学内容1. 引入新课:通过展示旋转型罐装机的实物或视频,激发学生对本节课的兴趣,引入新课内容。
相关教材章节:第四章第3节《机械传动系统》2. 理论知识学习:a. 旋转型罐装机的结构组成及各部分功能;b. 旋转型罐装机的工作原理及物理力学原理;c. 旋转型罐装机在工业生产中的应用及优势。
相关教材章节:第四章第3节《机械传动系统》及第4节《自动化设备》3. 实践操作:a. 分组讨论,设计旋转型罐装机优化方案;b. 制作简易旋转型罐装机模型,培养学生动手实践能力;c. 测试并评估旋转型罐装机的性能,分析问题并提出改进措施。
相关教材章节:第四章第5节《实践活动:设计制作简易机械装置》4. 总结与反思:a. 归纳旋转型罐装机的关键知识点;b. 学生分享实践过程中的收获和体验;c. 教师点评并指导学生改进方案。
机械原理课程设计任务书
旋转型灌装机
一、设计题目及原始数据
设计旋转型灌装机。
在转动工作台上对包装容器(如玻璃瓶)连续灌装流体(如饮料、酒、冷霜等),转台有多工位停歇,以实现灌装、封口等工序。
为保证在这些工位上能够准确地灌装、封口,应有定位装置。
如图1中,工位1:输入空瓶;工位2:灌装;工位3:封口;工位4:输出包装好的容器。
该机采用电动机驱动,传动方式为机械传动。
技术参数见下表。
旋转型灌装机技术参数表
方案号
转台直径 mm
电动机转速r/min
灌装速度r/min
1 600 1440 10
2 550 1140 12 3
500
960
10
二、设计方案提示
1.采用灌瓶泵灌装流体,泵固定在某工位的上方。
2.采用软木塞或金属冠盖封口,它们可由气泵吸附在压盖机构上,由压盖机构压入(或通过压盖模将瓶盖紧固在)瓶口。
设计者只需设计作直线往复运动的压盖机构。
压盖机构可采用移动导杆机构等平面连杆机构或凸轮机构。
3.此外,需要设计间歇传动机构,以实现工作转台间歇传动。
为保证停歇可靠,还应有定位(锁紧)机构。
间歇机构可采用槽轮机构、不完全齿轮机构等。
定位(锁紧)机构可采用凸轮机构等。
三、设计任务
1)根据功能要求,确定工作原理和绘制系统功能图。
2)按工艺动作过程拟定运动循环图。
3)构思系统运动方案(至少3个以上),进行方案评价,选出较优方案。
1
2
3
4
传送带
固定工作台
转台
图1 旋转型灌装机
4)对传动机构和执行机构进行运动尺寸设计。
5)用相关软件或程序对连杆机构进行运动学分析,并画出输出机构的位移、速度、和加
速度线图。
6)在2号图纸上画出绘制系统机械运动方案简图。
7)完成设计说明书的编写。