第七章船位误差青岛远洋船员学院.
- 格式:docx
- 大小:153.18 KB
- 文档页数:17
一、前言时光荏苒,转眼间我在青岛远洋船员学院的航海系实习已经接近尾声。
这段时间里,我深入了解了远洋船舶的运作,亲身参与了航海工作的各个环节。
以下是我这段时间实习的心得体会和总结。
二、实习背景青岛远洋船员学院是一所培养远洋船员的专业院校,我选择了航海系进行学习。
为了更好地将理论知识与实践相结合,学院为我们提供了远洋船员实习的机会。
此次实习,我所在的实习船舶为“远洋一号”,航线为我国沿海至东南亚。
三、实习过程1. 上船培训实习初期,我们在船上进行了一系列的培训,包括船舶概况、航海规则、船舶安全、救生设备使用等。
通过培训,我们对船舶有了初步的了解,为接下来的实习打下了基础。
2. 船舶操作在船舶操作方面,我主要学习了驾驶台的操作。
在指导船员的带领下,我参与了航行的各个环节,包括船舶的启航、航行、靠泊等。
通过实际操作,我掌握了船舶驾驶的基本技能。
3. 航海日志记录在实习过程中,我负责记录航海日志。
这要求我熟悉航海规则,掌握船舶的航行轨迹。
通过记录航海日志,我更加了解了船舶的运行规律,提高了自己的航海素养。
4. 船舶维护保养船舶的维护保养是保证航行安全的重要因素。
在实习期间,我参与了船舶的日常维护保养工作,包括船舶机械设备的检查、保养和维修。
通过这些工作,我了解了船舶维护保养的重要性,并掌握了相关技能。
5. 船员生活在船上生活,我深刻体会到了船员的辛勤付出。
船员们的生活节奏紧凑,工作强度大。
尽管如此,他们依然保持着乐观的心态,团结协作,共同完成航行任务。
四、实习体会1. 理论与实践相结合通过实习,我深刻体会到理论知识与实践操作相结合的重要性。
在船上,我将课堂上学到的知识运用到实际工作中,不仅提高了自己的专业技能,还锻炼了自己的实践能力。
2. 团队协作精神在船上,我明白了团队协作的重要性。
船舶航行过程中,各个部门需要紧密配合,才能确保航行安全。
通过实习,我学会了与他人沟通、协作,提高了自己的团队协作能力。
3. 船员的责任感船员肩负着船舶和乘客的生命安全,这是一份神圣的职责。
数据的来源,针对ECDIS中显示船位可能出现的误差,提出多种核实船位的方法以及修正船位的方式。
关键词:ECDIS 船位核实 船位误差 修正在船舶航行中,船位是航海人员操纵船舶的基础,船位的准确性直接影响船舶的航行安全。
在电子海图显示与信息系统(ECDIS)中,航海人员需充分理解船位的显示,不可忽视船位显示的准确性以及盲目信赖ECDIS。
1.船位的来源在ECDIS性能标准MSC.232(82)决议中,并未详细规定ECDIS接入定位传感器的方式。
实践中,ECDIS船位的来源通常有以下几种方式。
1.1卫星定位系统卫星定位方式已普遍应用于船舶,E C DI S可以与卫星定位设备连接,如我国的北斗卫星定位系统、美国的GPS\DGPS系统、欧洲的伽利略定位系统和俄罗斯的GLONA S S系统。
通过与定位设备连接,ECDIS可以连续实时的显示本船位置。
相比传统的定位方式,卫星定位有很大的优势,可快速、准确的获取当前船位,几乎所有船舶都将卫星定位作为主要的定位手段,这样减轻了航海人员的工作负担。
1.2航迹推算当卫星定位系统无法正常工作时,EC DI S不能获得连续实时的船位,此时,航海人员可以通过其他定位手段(如陆标定位、移线定位)获取船舶较准确的位置作为观测船位,并将该船位作为航迹推算的起始船位,通过接入ECDIS的罗经和计程仪数据获取航向和航程,并结合航行海域的风流情况,考虑船舶航行中的风流压差等因素,此时,ECDIS仍旧可以连续实时的显示本船位置。
另外,ECDIS允许航海人员手动输入船位,利用鼠标或坐标输入的方式手动将船位标绘在海图上。
2.船位的核实2.1主辅定位系统监测在E C DI S系统中,可以同时接入多个定位设备,如可以接入两台GPS设备。
把GPS1作为主定位系统,GPS2作为辅助定位系统。
两套系统都可以提供船位数据,选择其中一个作为显示船位。
设置主辅定位系统船位差异报警,如设置两套定位系统的距离差大于100米时报警,两套系统可以互相监测,当某一个定位设备出现异常时,定位距离差大于设定值,ECDIS能够及时发出报警。
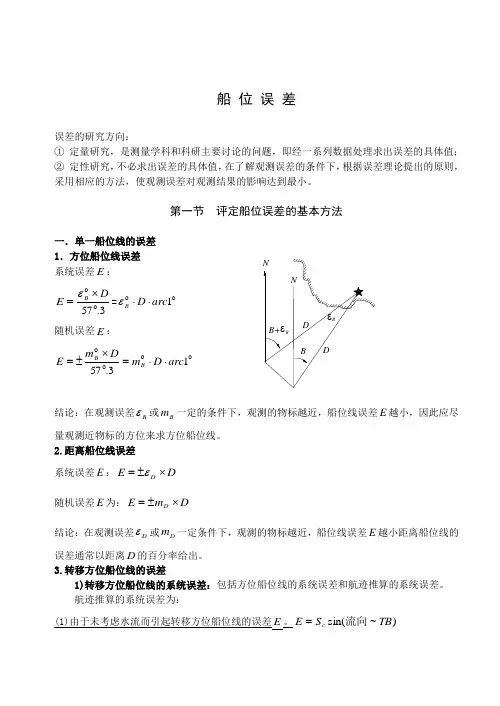
船 位 误 差误差的研究方向:① 定量研究,是测量学科和科研主要讨论的问题,即经一系列数据处理求出误差的具体值;② 定性研究,不必求出误差的具体值,在了解观测误差的条件下,根据误差理论提出的原则,采用相应的方法,使观测误差对观测结果的影响达到最小。
第一节 评定船位误差的基本方法一.单一船位线的误差 1.方位船位线误差 系统误差E :=E 3.57D B⨯ε= 1arc D B ⋅⋅ε随机误差E :13.57arc D m D m E BB ⋅⋅=⨯±=结论:在观测误差B ε或B m 一定的条件下,观测的物标越近,船位线误差E 越小,因此应尽量观测近物标的方位来求方位船位线。
2.距离船位线误差系统误差E :D E D ⨯±=ε 随机误差E 为:D m E D ⨯±=结论:在观测误差D ε或D m 一定条件下,观测的物标越近,船位线误差E 越小距离船位线的误差通常以距离D 的百分率给出。
3.转移方位船位线的误差1)转移方位船位线的系统误差:包括方位船位线的系统误差和航迹推算的系统误差。
航迹推算的系统误差为:(1)由于未考虑水流而引起转移方位船位线的误差E 。
)~sin(TB S c 流向=结论:当转移船位线的方位TB 与流向平行时E =0,误差最小,垂直时,E =c S 误差最大。
移线的时间间隔越短,c S 越小,则E 越小,在航海实际工作中该项E 属于未定系统误差。
(2)由推算航向的误差C ε引起转移船位线的误差E :Q arc S Q S E c ccos 1cos 3.57εε==Q =TB -TC ,移线期间的航程为S 。
结论:当Q =90°时,误差E 最小。
(3)由推算航程的误差S ε引起转移船位线的误差EQ E s sin ε=结论:当Q =0°时,误差E 最小。
2)转移方位船位线的随机误差转移方位船位线的随机误差包括转移前船位线的标准差B m 和转移期间的推算误差ρ:22ρ+±=B m E4.距离差船位线误差距离差船位线的随机误差为: 2csc22csc081.0γγd t m m E ∆∆±=±=t m ∆——时差的标准差(μs );d m ∆——距离差的标准差(′);γ——船对基线的张角。

青岛远洋船员学院船舶实习记录薄(甲板部学员用)----------编者:驾驶0812班伊凡一、船舶消防1.1 操作烟火探测设备烟火报警系统主要由两部分组成,即探测器和报警器两部分.探测器安装在保护处所,将失火时的各种信号通过电路传递给报警器.安装在驾驶台的报警器则将该电信号转换为声光显示,并发出火灾警报和指示失火部位.我们船上的烟火探测设备采用的是感烟和感温式报警器.船上的报警系统由三副负责使用管理,电机员负责维修.一般每个月应进行手动检测,每半年进行一次探测器效用检查,以保证报警系统处于良好状态.由于不同船舶上装的设备型号也会不同,不过工作原理都大同小异.设备的旁边一般都贴有操作说明,当某个部位有报警时,面板上的指示灯会闪烁(故障和火警),同时,该部位的指示灯亮,此时,就在面板上的控制开关打到“OFF”位置就可复位,并及时查清报警原因。
故障报警则须在故障解除后自动复位驾驶员应认真阅读.操作时应严格按照操作手册和船上特别说明书进行试验和操作.1.2 确保所有值班人员能够检测危险情况、纠正危险行为保持船舶整洁有序船舶报警装置一般有两种方法即手动报警和自动报警系统。
两种报警都能显示出该系统所服务的分区已发火灾或有火灾的可能,并应集中于驾驶台内,而且,该装置的声光报警设施应位于驾驶室以外的位置,以保证火灾信号可立即被其他船员收到.任何船舶应制定船上安全防火规则,并予以认真贯切执行:1)对易燃物进行管制:甲板上不可堆放易燃物品废纸、油污等物应放入有盖的金属桶;2)装卸易燃危险品货物应严格按照危险品运输规则进行配载,并进行消防监督装卸;3)建立安全防火制度,保持有效的巡逻制度,以便迅速探知任何火灾的发生;船舶通道随时都保持畅通和清洁;4)每月至少进行一次消防演习;5)其他注意事项:如特殊地方不准吸烟或乱丢烟头,明火作业要有专人看守,航行中不能锁门睡觉等。
1.3 使值班人员确定消防设备、应急逃生通道和声响警报的位置所有船舶应制定船上安全防火制度,保持有效的巡逻制度,以便迅速探知任何火灾的发生。
实习报告一、前言随着全球化进程的不断推进,远洋船员在国际贸易和海上运输领域扮演着越来越重要的角色。
作为一名未来的远洋船员,我深知实习经验对于理论知识的巩固和职业技能的提升具有重要意义。
在此,我通过这次远洋船员实习,详细记录了实习期间的学习和工作经验,并对实习过程中的收获和不足进行总结和反思。
二、实习单位与岗位本次实习单位为青岛远洋船员学院,实习岗位为航海系实习生。
实习期间,我主要参与了船舶操纵、船舶管理、海上安全、航海气象等课程的学习和实践。
三、实习内容与过程1. 船舶操纵实习在船舶操纵实习环节中,我学习了船舶的基本构造、操纵原理和操作方法。
在实际操作过程中,我熟悉了船舶的各种设备,掌握了驾驶台的基本操作,并在指导下独立完成了船舶的离港、靠泊和移泊等操作。
2. 船舶管理实习在船舶管理实习环节中,我学习了船舶管理体系、船员职责和安全管理规定。
通过实际参与船舶的管理工作,我了解了船舶管理的组织架构,掌握了船员职责的划分,并学会了如何进行安全管理和风险控制。
3. 海上安全实习在海上安全实习环节中,我学习了海上安全知识、应急预案和求生技能。
在实际操作中,我参加了船舶的安全培训,了解了海上安全的重要性,掌握了应急预案的制定和实施,并熟练掌握了救生艇、救生筏等求生设备的操作和使用。
4. 航海气象实习在航海气象实习环节中,我学习了气象基本知识、气象图表的识别和应用。
通过实际操作,我掌握了气象观测的方法,学会了气象预报的编制,并对航海气象有了更深入的了解。
四、实习收获与反思1. 实习期间,我系统学习了航海知识,提高了自己的专业技能,为今后从事远洋船员工作奠定了基础。
2. 实习使我深刻认识到船舶安全的重要性,提高了我的安全意识,为今后的工作提供了安全保障。
3. 实习锻炼了我的团队合作能力和沟通协调能力,使我更加了解团队合作的重要性。
4. 实习使我对自身的不足有了更清晰的认识,提醒我在今后的学习中更加努力,提高自己的综合素质。
附件:青岛远洋运输有限公司船员管理实施细则(试行)目录第一章总则第二章用工管理第三章教育培训第四章证件管理第五章调配制度第六章在船管理第七章考核与评估第八章聘任与任职第九章船舶事故处理第十章假期、事假、病假及旷工第十一章守则与纪律第十二章奖励与惩处第十三章附则***********************************************************第一章总则第一条为加强船员管理,提高船员素质,维护船舶正常生产和生活秩序,确保船舶安全优质地完成运输生产任务,维护船员和公司的合法权益,根据国家《劳动法》《劳动合同法》《船员条例》《船员服务管理规定》以及《中远集团船员管理办法》等法律、法规、规定和《2006年海事劳工公约》等国际公约,结合公司实际,制订本细则。
第二条本细则所称公司是青岛远洋运输有限公司的简称,船员公司是青岛远洋对外劳务合作有限公司的简称。
船员公司是公司的下属子公司。
除特别规定外,公司授权船员公司行使本细则规定的各项管理和服务职能。
第三条本细则所称船员是指与公司或船员公司签订劳动合同、建立劳动关系的船员。
第四条本细则是公司规章制度的重要组成部分,是公司船员管理工作中的基础性规定,适用于全体船员和公司所属从事船员管理工作的部门及人员。
公司、船员公司、船员及相关人员应当遵守。
在船实习船员、见习船员、协作船员、外聘船员以及临时随船人员,在船期间参照本细则执行。
第五条本细则所称船员管理部门是指公司人力资源部门等主管船员管理的部门,以及由公司授权的船员公司的人事、调配管理、教育培训、党群工作部门及其他相关部门的通称。
第六条中国远洋运输(集团)总公司及其下设的高于公司的机构是公司的上级领导机关。
其发布的各项管理规章制度经公司转发后,公司、船员公司、船员及相关人员应当遵守。
第七条船员公司依据“ISO9001质量管理体系”要求和挪威船级社《海员劳务公司认证规则》建立质量管理体系并通过认证,船员公司管理部门及船员应当遵守。
第七章船位误差2661.考虑到航迹推算误差和两条船位线的夹角这两方面因素对观测船位的影响,太阳移线定位要求太阳方位变化在___。
A.15°以内为好B.30°~50°为好C.50°~70°为好D.70°~90°为好2662.太阳移线定位时,为消除航迹向的误差所引起转移船位线的误差应___。
A.提高航速B.缩短两次观测时间间隔C.提高推算精度,有条件时待太阳位于正横方向时作第一次观测D.提高推算精度,有条件时待太阳位于首尾方向时作第一次观测2663.由于实际眼高差与表列眼高差不一致而引起观测高度的误差是产生天文船位线___的主要原因之一。
A.随机误差B.系统,误差C.曲率误差D.粗率2664.若世界时有___的误差,那么会使截距产生的最大误差为0'.25。
A.0.25秒B.1秒 C 3秒 D 10秒2665.当天体高度大于30°时,表列蒙气差的误差一般不超过___。
A.0'.1 B.0'.5 C.1'D.2'2666.三天体定位,如果三天体分布范围大于180°,并且船位误差三角形是由系统误差引起的,则消除了系统误差之后的观测船位应在___。
A.误差三角形内切圆的圆心上B.误差三角形外切圆的圆心上C.误差三角形旁切圆的圆心上D.误差三角形内任意一点2667.在相同观测条件下,对某一固定量进行重复观测,出现绝对值大小和符号均不确定的误差称为___。
A.粗差B.固定误差C.系统误差D.随机误差2668.当测者眼高为9米时,若有1米误差,可引起眼高差的误差的___。
A.1'. 0 B.0'.6 C.0'.3 D.0'.12669.由随机误差引起的天文船位误差三角形,其最概率船位在三角形的___。
A.三边垂线的交点上B.三边中线的交点上C.三条角平分线的交点上D.三条反中线的交点上2670.高度差法原理上的误差是___。
第七章船位误差误差的研究可分成两个方面:一是对误差的定量研究;二是对误差的定性研究。
航海上研究误差的目的并不是期望通过一系列的数据处理进一步提高观测结果精度,而是指导航海人员根据船位误差理论确定的原则采用正确的方法,的基础上得到最佳观测结果,这就是对船位误差做定性分析。
第一节评定船位误差的基本方法.单一船位线的误差1.方位船位线误差系统误差:结论:D或m D —定条件下,观测的物标越近,船位线误差在原有精度E B D =57 .3 B D arc1(1的弧度值1/57Q3 arc1 ) /BB+随机误差:m B D/ B /D K/57 .3m B D arc1结论:B或m B —定的条件下,观测的物标越近,船位线误差E越小,应尽量观测近物标的方位来求方位船位线。
2.距离船位线误差距离船位线的误差通常以距离D的百分率给出。
系统误差:随机误差: E m D DE越小,因此2应尽量观测近物标的距离来求距离船位线。
3 .转移方位船位线的误差1) 转移方位船位线的系统误差包括方位船位线的系统误差和航迹推算的系统误差。
航迹推算的系统误差分别为: (1)由于未考虑水流而引起转移方位船位线的误差E S c sin (流向 ~TB )式中:S c ――移线期间内水流的流程流向〜TB ――流向与物标真方位之间的交角。
当转移船位线的方位 TB 与流向平行时 E = 0,误差最小,垂直时,E = S c 误 差最大;移线的时间间隔越短,S c 越小,则E 越小;在航海实际工作中该项 E 属于未定系统误差。
Q = TB — TC ; 移线期间的航程为 当Q = 90°时,误差E 最小。
(3)由推算航程的误差S 引起转移船位线的误差E 。
E s SinQ2)转移方位船位线的随机误差 包括转移前船位线的标准差m B 和转移期间的推算误差(2)由推算航向的误差C 引起转移船位线的误差E 。
E -^^cosQ 57 .3S c arc1 cosQ1.系统误差影响下的观测船位精度1)两条船位线定位时的系统误差由于系统误差所引起的两条船位线的误差分别为:E 1—和 E 2—g 1g 24.距离差船位线误差距离差船位线的随机误差为:E 0.081m t CSC —2m d ----- C SC —2式中:m t ――时差的标准差(卩 S );m d --------- 距离差的标准差(‘)船对基线的张角。
船在基线上 180 ,E 0.081 ;船在基线延伸线上 ,E 。
二. 评定船位误差的方法观测船位的误差一般有系统误差和随机误差由上式可以得到两条船位线向量误差分别为:两条船位线受到同向误差的影响, 即两条船位线的误差同为正值,F i 和F 2点,船位误差为5:如果£ 1= £ 2= £,则:―丄Sing 1结论:在运用两条船位线进行定位时,为了消除或者减小系统误差的影响,则:⑴应尽可能地减小观测值的系统误差。
⑵应尽可能地使两条船位线的交角接近 90°,不小于30°,不大于150 °。
2)三条船位线定位时的系统误差当三条船位线的系统误差相等时,则消除了系统误差后的船位点应该是在误差 三角形的内心或旁心上,即:⑴分布超过180。
时,实际船位点位于三角形的内心上。
⑵分布小于1800时,实际船位点位于三角形的一个旁心上。
旁心的判断:将三角形的三边向同一方向移动同样的距离后,交成了一个新的 三角形,将新三角形与原三角形的对应顶点连起来,三条连线的交点就是所求的旁 心。
三条船位线定位时,为消除或减小系统误差对定位精度的影响,应尽可能地使 各船位线之间的夹角最好均匀分布为600或1200,至少不小于300或不大于1500。
2 .随机误差影响下的观测船位的精度1)两条船位线定位时的随机误差最概率船位:从随机误差的角度而言, 同时观测的两条船位线的交点即为 (最接近真实船位的船位)。
最概率船位的误差可以采用标准误差四边形、标准误差椭圆或标准误差圆来评 定。
⑴标准误差四边形船位误差带:设船位线有标准误差± E ,以船位线为中心线左右± E 范围所构成 的带域。
E 2 sin和V 2g 1 sinsin g 2 sin若当观测时,或同为负值,则实际的船位位于丄- sin 打 g 1g 22-^^ COS g 1g 221 2 — ------ C0sg2g 1g2观测时真实船位落在:(一倍)标准误差四边形内的概率为 68.3%。
二倍标准误差四边形的概率为 95.5%。
三倍标准误差四边形的概率为99.7%。
标准误差四边形:以同时测得的两条船位线之船 位误差带所构成的平行四边形。
观测时真实船位落在:(一倍)标准误差四边形内的概率为 46.6%。
二倍标准误差四边形的概率为 91.1%。
三倍标准误差四边形的概率为 99.5%。
⑵标准误差椭圆标准误差椭圆:四边形相切的误差椭圆。
真实船位落在标准误差椭圆内的概率是 二倍标准误差椭圆的概率为 三倍标准误差椭圆的概率为真实船位出现的概率为等值的,能够反映观测船位误差的大小和方向。
是最为理想的反映观测船位精度的误差图形。
绘画复杂,在实际航海当中较少使用。
⑶标准误差圆标准误差圆又称均方误差圆,它是标准误差四边形的外接圆。
当两条船位线的 误差差别较大时,或者是船位线的夹角较小时,一般用标准误差四边形而不宜用标 准误差圆。
标准误差圆具有作图简便、直观和在标准误差圆内真实船位出现的概率 大的优点。
但它无法反映误差的方向。
所谓的标准误差圆,它是以最概率船位点 F 为圆心,以M J a 2 b 2为半径所作的圆。
因为b J v j V 22 2MV 2 sinb J V i 2 v22V 1V 2 sin所以39.4%; 86.5%; 98.9%。
a 2 b 2V i2V 22sin2E i 2E 2 sinsffcf2M 丄」rnsinsin从上式中可以看出, 为了减小观测船位的均方误差 该:①尽量使两位置线交角接近 90 °;②尽量减小观测值的标准误差m j 和m 2。
真实船位在观测船位均方误差圆内的概率值是一个变量, 圆的长短半轴的比值 b/a 的变化而变化的。
下表为不同的 率值。
⑷三种观测船位标准误差图形的比较① 在评定船位精度方面,误差椭圆是最为精确和最有利的图形,四边形次之, 椭圆和四边形均能反映误差的方向,误差圆无法反映误差的方向。
② 误差圆作图简易和方便,椭圆作图最为复杂。
实际航海当中常用误差圆。
为 了表征误差的方向有时也用四边形来评定船位精度;③ 真实船位出现的概率, 误差圆的概率最大, 其次为四边形,椭圆的概率最小; 若将三种图形的面积画成同样大小时, 船位出现在椭圆内的概率最大, 四边形次之, 误差圆最小。
2)偶然误差影响下三条船位线确定最概率船位的方法。
反中线法(作图示意)2m 2g 1 g 2(即均方误差圆半径)它是随着标准误差椭b/a 值的均方误差圆的概第二节推算船位的误差、推算船位误差的主要影响因素如下:推算起始点的误差( the error of initial estimating point )起始点必须是准确的观测船位,目的是为了减小其后航迹推算的误差。
航程误差 (the error of running distanee)1) 计程仪读数的误差; 2) 计程仪改正率的误差;3) 水流要素掌握不准产生的航程误差; 4) 航线上截取航程的作图误差。
航向误差(courseerror)1)2) 3) 4)5)风流压差与实际不符产生的航向误差。
二•无风无流情况下航迹推算的误差推算船位的左右偏移量为:J(1.745%S L )2 (1%S L )2 2%S L一般条件下,无风无流情况下推算船位的标准误差圆半径约为推算航程的以上推算船位误差的计算公式,只是在航程较短(一般不超过 比较理想; 航程较长时,运用上述计算公式计算得到的推算船位误差,往往大于实际存在 的误差。
当在下述情况下,最好应绘画概率航迹区,以保证船舶航行安全。
1 )远航归来,接近海岸、海峡、航海危险物和禁区时; 2)当能见度不良,船舶航行在航海危险物附近时。
三. 有风无流情况下航迹推算的误差如果风压差是由实际观测求得的,则可以认为有风无流情况下推算船位标准误航向误差 m e1 .0。
1. 2. 3. 航线作图不准造成航向误差; 从罗经读取航向的误差; 罗经差的误差; 操作舵不稳定产生的航向误差; BF(BI)m e S L 57 .3S L 57.3 E L推算航程的误差: 推算BD ( BC ) 船=1%3L 。
位的J BF 2 BD 2 2%。
100n mile )时,差是推算航程的3.2%。
四. 有流无风情况下航迹推算的误差主要决定于对流资料掌握的准确程度, 约为推算航程的 4%~7%。
五. 有风有流情况下航迹推算的误差约为无风无流的2~4倍; 约为推算航程的 5%〜8%。
六. 航迹推算误差归纳如下:⑴无风流⑶有流无风无风流02%S L航迹推算误差为:4% ~ 7%S L航迹推算误差为:5%〜8%S LS L <100 n mile 时上述结果与实际较为相符;S L >100 n mile 时上述结果大于实际结果(实际误差小于上述推算误差) 推算船位的误差主要有航向误差和航程误差,其产生的主要原因包括: 航向误差:罗经差的误差、操舵不稳、风流压差的误差。
航程误差:计程仪改正率的误差、水流要素的误差。
水流要素流向误差m P流速误差m v eV e m Ph 57 .3m Ve⑷有风有流有风无流 1 3.2%S L水流要素引起推算船位误差m e1罗经差的误差 占八'、操舵不稳 m C S L .357 1.7%S Lm s 计程仪改正率误差 m sS L E L 1%S Ls IL\| 57.3航迹推算误差为:±2%S Lm cA m em e S L 57 .3 3.1%S Lm CA m sS L m L1%S Lhi 57 .3(m L )2航迹推算误差为:± 3.2%S L第三节陆标定位的船位误差、方位定位的船位误差1 .两方位定位的船位误差系统误差:—__DT__2D1 D2 cos sin B d57 .3sin随机误差:mi BM=5rS;rJ D12 D22式中: 两方位船位线的交角;D i,D2 ——分别到两物标的距离;d ——两物标之间的距离结论:为了提高两方位定位的精度,应尽量减小观测方位系统误差机误差m B ;应尽量选用离船较近的物标;两方位船位线的交角好,至少应大于30°或小于150 °。