∑M C ( F) =0 N2 L3+f2 L5+M2-F2 L3-G2 L2-F1 L4-G1 X +M1 =0
第一步的实现与楼梯台阶的高度、机器人关节臂 的长度和重心位置、机器人中间主体长度和重心 位置、履带驱动轮半径、关节臂的驱动力矩以及 接触面性质有关。关节臂的驱动力矩越大,接触 面越粗糙,机器人就越容易实现第一步。
脱离地面的力学条件
达朗贝尔原理 定义:作用于一个物体的外力与动力的反作用之和等于零 公式:F+(-Ma)+N=0………..(式1) 其中M,a为物体质量和加速度,F为物体受到的直接外力, N为物体受到的约束反作用力(也是外力)。 在没有约束时,相应的N=0,式1成为 :F-Ma=0 ……(式2)
通过分析可知机器人重心位置机器人履带驱动轮半径及机器人关节臂与中间主体的长度都会影响到机器人的爬梯性能但是这些影响又不具有单调性因此要提高机器人爬梯性能可以在考虑机器人客观条件的前提下以上述条件为依据对机器人结构进行优化
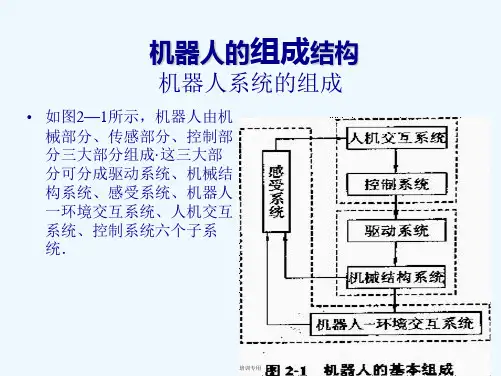
智能机器人概论
履带移动机器人爬梯原理
背景介绍
随着现代军事的发展和反恐战争需要,移动机器人具有 可以执行侦查、巡逻、反恐和排爆等高危险性工作的 特点,其应用前景越来越广泛。移动机器人在工作中最 常见的障碍就是楼梯,所以攀爬楼梯是移动机器人适应 结构化环境所必备的功能。
在机器人质量不变的情况下,机器人中间主体的加长、机 器人整体重心位置向C 点的靠近以及履带驱动轮半径变 大,都有利于第一步的实现。在这些因素中,关节臂的长度 变化对第一步的影响最复杂。在其它因素都不变的情况 下,设关节臂的驱动力矩为M, 则近似有:
M R cos( ) N 2 L3 [ L1 ] L1 sin H R arcsin L1