第六章GPS基线解算
- 格式:doc
- 大小:323.00 KB
- 文档页数:13
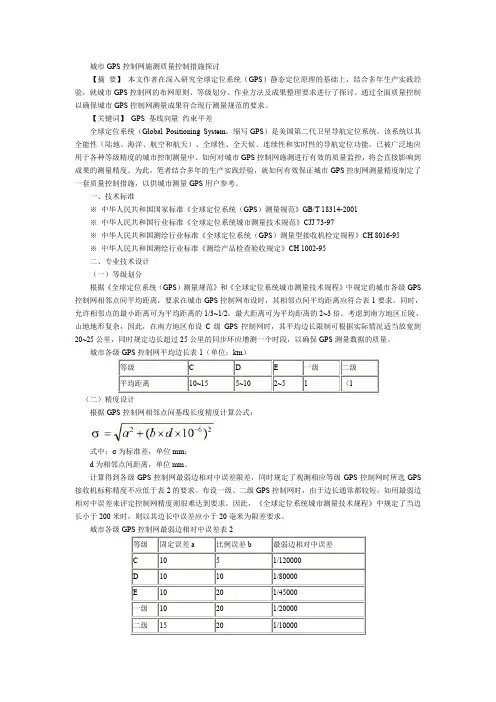
城市GPS控制网施测质量控制措施探讨【摘要】本文作者在深入研究全球定位系统(GPS)静态定位原理的基础上,结合多年生产实践经验,就城市GPS控制网的布网原则、等级划分、作业方法及成果整理要求进行了探讨。
通过全面质量控制以确保城市GPS控制网测量成果符合现行测量规范的要求。
【关键词】GPS 基线向量约束平差全球定位系统(Global Positioning System,缩写GPS)是美国第二代卫星导航定位系统。
该系统以其全能性(陆地、海洋、航空和航天)、全球性、全天候、连续性和实时性的导航定位功能,已被广泛地应用于各种等级精度的城市控制测量中。
如何对城市GPS控制网施测进行有效的质量监控,将会直接影响到成果的测量精度。
为此,笔者结合多年的生产实践经验,就如何有效保证城市GPS控制网测量精度制定了一套质量控制措施,以供城市测量GPS用户参考。
一、技术标准※中华人民共和国国家标准《全球定位系统(GPS)测量规范》GB/T 18314-2001※中华人民共和国行业标准《全球定位系统城市测量技术规范》CJJ 73-97※中华人民共和国测绘行业标准《全球定位系统(GPS)测量型接收机检定规程》CH 8016-95※中华人民共和国测绘行业标准《测绘产品检查验收规定》CH 1002-95二、专业技术设计(一)等级划分根据《全球定位系统(GPS)测量规范》和《全球定位系统城市测量技术规程》中规定的城市各级GPS 控制网相邻点间平均距离,要求在城市GPS控制网布设时,其相邻点间平均距离应符合表1要求。
同时,允许相邻点的最小距离可为平均距离的1/3~1/2,最大距离可为平均距离的2~3倍。
考虑到南方地区丘陵、山地地形复杂,因此,在南方地区布设C级GPS控制网时,其平均边长限制可根据实际情况适当放宽到20~25公里,同时规定边长超过25公里的同步环应增测一个时段,以确保GPS测量数据的质量。
城市各级GPS控制网平均边长表1(单位:km)(二)精度设计根据GPS控制网相邻点间基线长度精度计算公式:式中:σ为标准差,单位mm;d为相邻点间距离,单位mm。
第六章GPS 基线解算第1节GPS 基线解算的基本原理GPS 基线向量表示了各测站间的一种位置关系,即测站与测站间的坐标增量。
GPS 基线向量与常规测量中的基线是有区别的,常规测量中的基线只有长度属性,而GPS 基线向量则具有长度、水平方位和垂直方位等三项属性。
GPS 基线向量是GPS 同步观测的直接结果,也是进行GPS 网平差,获取最终点位的观测值。
一、观测值基线解算一般采用差分观测值,较为常用的差分观测值为双差观测值,即由两个测站的原始观测值分别在测站和卫星间求差后所得到的观测值。
双差观测值可以表示为下面的形式:n mff trop ion f f N dd dd dd v dd ,)()()()(⋅+++=+λρρρφ其中:为双差分算子(在测站i ,j 和卫星m ,n 间求差);(...)dd 为频率f 的双差载波相位观测值;)(f dd φ为频率f 的双差载波相位观测值的残差(改正数);f v 为观测历元t 时的站星距离;ρ为电离层延迟;ion ρ为对流层延迟;trop ρ为频率f 的载波相位的波长;f λ为整周未知数。
n m fN ,若在某一历元中,对k 颗卫星数进行了同步观测,则可以得到k -1个双差观测值;若在整个同步观测时段内同步观测卫星的总数为l 则整周未知数的数量为l -1。
在进行基线解算时,和一般并不作为未知参数,而是通过某些方法将它们消ion ρtrop ρ除1。
因此,基线解算时一般只有两类参数,一类是测站的坐标参数,数量为32;另1,3C X 1如用模型改正或双频改正。
2 在基线解算时将基线的一个端点的坐标作为已知值固定,解求另一个点。
固定的点称为起点,待求的点一类是整周未知数参数(m 为同步观测的卫星数),数量为。
1,1-m N X 1-m 二、基线解算(平差)基线解算的过程实际上主要是一个平差的过程,平差所采用的观测值主要是双差观测值。
在基线解算时,平差要分三个阶段进行,第一阶段进行初始平差,解算出整周未知数参数3的和基线向量的实数解(浮动解);在第二阶段,将整周未知数固定成整数;在第三阶段,将确定了的整周未知数作为已知值,仅将待定的测站坐标作为未知参数,再次进行平差解算,解求出基线向量的最终解-整数解(固定解)。
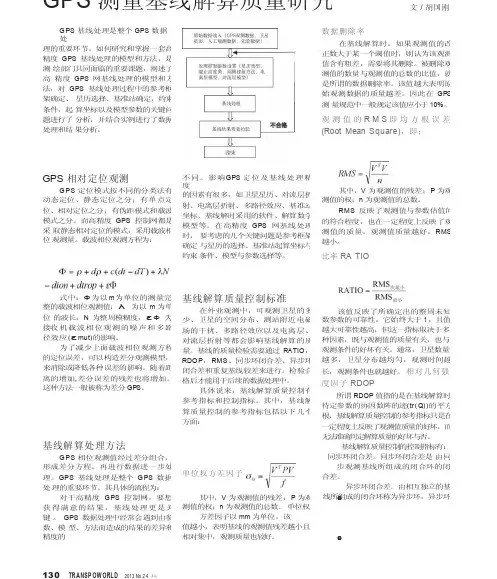
GPS测量基线解算质量研究文/ 胡国刚G PS基线处理是整个GPS数据处理的重要环节。
如何研究和掌握一套高精度GPS基线处理的模型和方法,是测绘部门共同面临的重要课题,阐述了高精度GPS网基线处理的模型和方法,对GPS基线处理过程中的参考框架确定、星历选择、基准站确定,约束条件,起算坐标以及模型参数的关键问题进行了分析,并结合实例进行了数据处理和结果分析。
数据删除率在基线解算时,如果观测值的改正数大于某一个阈值时,则认为该观测值含有粗差,需要将其删除。
被删除观测值的数量与观测值的总数的比值,就是所谓的数据删除率。
该值越大表明原始观测数据的质量越差。
因此在GP S测量规范中一般规定该值应小于10%。
观测值的 R M S 即均方根误差(Root Mean Square),即:GPS相对定位观测G PS定位模式按不同的分类法有动态定位、静态定位之分;有单点定位、相对定位之分;有伪距模式和载波模式之分。
而高精度GPS控制网都是采取静态相对定位的模式,采用载波相位观测量。
载波相位观测方程为:不同。
影响 GPS定位及基线处理精度的因素有很多,如卫星星历、对流层折射、电离层折射、多路径效应、基准站坐标、基线解时采用的软件、解算数学模型等。
在高精度GPS网基线处理时,要考虑的几个关键问题是参考框架确定与星历的选择、基准站起算坐标与约束条件、模型与参数选择等。
其中,V为观测值的残差;P为观测值的权;n为观测值的总数。
RMS反映了观测值与参数估值间的符合程度,也在一定程度上反映了观测值的质量,观测值质量越好,RMS越小。
比率RA TIO式中:Φ为以 m 为单位的测量完整的载波相位观测值;λ为以m为单位的波长;N为整周模糊度,εΦ为接收机载波相位观测的噪声和多路径效应 (εmut)的影响。
为了减少上面载波相位观测方程的定位误差,可以构造差分观测模型,来消除或降低各种误差的影响。
随着距离的增加,差分误差的残差也将增加。
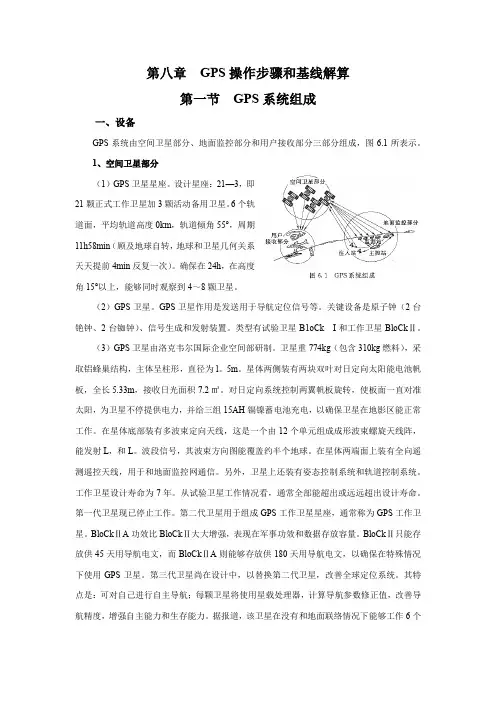
第八章GPS操作步骤和基线解算第一节GPS系统组成一、设备GPS系统由空间卫星部分、地面监控部分和用户接收部分三部分组成,图6.1所表示。
1、空间卫星部分(1)GPS卫星星座。
设计星座:21—3,即21颗正式工作卫星加3颗活动备用卫星。
6个轨道面,平均轨道高度0km,轨道倾角55°,周期11h58min(顾及地球自转,地球和卫星几何关系天天提前4min反复一次)。
确保在24h,在高度角15°以上,能够同时观察到4~8颗卫星。
(2)GPS卫星。
GPS卫星作用是发送用于导航定位信号等。
关键设备是原子钟(2台铯钟、2台铷钟)、信号生成和发射装置。
类型有试验卫星B1oCk I和工作卫星BloCkⅡ。
(3)GPS卫星由洛克韦尔国际企业空间部研制。
卫星重774kg(包含310kg燃料),采取铝蜂巢结构,主体呈柱形,直径为l。
5m。
星体两侧装有两块双叶对日定向太阳能电池帆板,全长5.33m,接收日光面积7.2㎡。
对日定向系统控制两翼帆板旋转,使板面一直对准太阳,为卫星不停提供电力,并给三组15AH镉镍蓄电池充电,以确保卫星在地影区能正常工作。
在星体底部装有多波束定向天线,这是一个由12个单元组成成形波束螺旋天线阵,能发射L,和L。
波段信号,其波束方向图能覆盖约半个地球。
在星体两端面上装有全向遥测遥控天线,用于和地面监控网通信。
另外,卫星上还装有姿态控制系统和轨道控制系统。
工作卫星设计寿命为7年。
从试验卫星工作情况看,通常全部能超出或远远超出设计寿命。
第一代卫星现已停止工作。
第二代卫星用于组成GPS工作卫星星座,通常称为GPS工作卫星。
BloCkⅡA功效比BloCkⅡ大大增强,表现在军事功效和数据存放容量。
BloCkⅡ只能存放供45天用导航电文,而BloCkⅡA则能够存放供180天用导航电文,以确保在特殊情况下使用GPS卫星。
第三代卫星尚在设计中,以替换第二代卫星,改善全球定位系统。
其特点是:可对自己进行自主导航;每颗卫星将使用星载处理器,计算导航参数修正值,改善导航精度,增强自主能力和生存能力。
第六章 GPS 基线解算第1节 GPS 基线解算的基本原理一较为常用的差分观测值为双差观测值双差观测值可以表示为下面的形式(...)dd 为双差分算子j和卫星mf v 为频率f 的双差载波相位观测值的残差ion ρ为电离层延迟f λ为频率f 的载波相位的波长若在某一历元中则可以得到k -1个双差观测值在进行基线解算时而是通过某些方法将它们消除1»ùÏß½âËãʱһ°ãÖ»ÓÐÁ½Àà²ÎÊý数量为32m 为同步观测的卫星数数量为1−m 基线解算基线解算的过程实际上主要是一个平差的过程在基线解算时第一阶段进行初始平差浮动解在第二阶段在第三阶段仅将待定的测站坐标作为未知参数解求出基线向量的最终解-整数解2在基线解算时将基线的一个端点的坐标作为已知值固定固定的点称为起点3此时所解求出的整周未知数为实数1. 初始平差根据双差观测值的观测方程然后组成法方程后其结果为=N C X X X )))待定参数的协因数阵单位权中误差通过初始平差但由于观测值误差使得其结果为实数此时与实数的整周未知数参数对应的基线解被称作基线向量的实数解或浮动解必须准确地确定出整周未知数的整数值目前所采用的方法基本上是以下面将要介绍的搜索法为基础的1. 根据初始平差的结果N X )和NNX XD ))1ÒÔÓëËüÃÇÖÐÎó²îµÄÈô¸É±¶2为搜索半径2. 从上面所确定出的每一个整周未知数的备选整数值中一次选取一个并分别以它们作为已知值确定出相应的基线解[]iCiC X Xi Q Q ))=⋅ ∈♠⋅√∏∝⊗®⊄©〈≠≈∫≥∅≠⊂∂♦ ®[]iC i X X ))=i 0ˆσ不过当出现以下情况时而无法求出该基线向量的整数解其自由度为f 和f2可根据一定的置信水平来加以确定其中i 0ˆσ也被称为RMS3. 确定基线向量的固定解当确定了整周未知数的整数值后第2节 GPS 基线解算的分类一每两台接收机之间就可以形成基线向量其中最多可以选出相互独立的1−m 条同步观测基线只要保证所选的1−m 条独立基线不构成闭和环就可以了凡是构成了闭和环的同步基线是函数相关的但它们却是误差相关的所谓单基线解算对每条基线单独进行解算但由于其解算结果无法反映同步基线间的误差相关的特性一般只用在普通等级GPS 网的测设中多基线解1. 定义与单基线解算不同的是在基线解算时对所有同步观测的独立基线一并解算2. 特点多基线解由于在基线解算时顾及了同步观测基线间的误差相关特性在理论上是严密的质量控制指标及其应用1. 质量控制指标n 单位权方差因子0ˆσn 定义fPVV T =0ˆσ其中P 为观测值的权n 实质单位权方差因子又称为参考因子如果观测值的改正数大于某一个阈值时则需要将其删除就是所谓的数据删除率数据删除率越高n RATIOn 定义RATIO RMS RMS =次最小最小显然这一指标取决于多种因素测值的质量有关n RDOPn 定义所谓RDOP 值指的是在基线解算时待定参数的协因数阵的迹的平方根即观测条件当基线位置确定后而观测条件又是时间的函数实际上对与某条基线向量来讲n 实质RDOP 表明了GPS 卫星的状态对相对定位的影响它不受观测值质量好坏的影响Root Mean Square 即V 为观测值的残差n 为观测值的总数观测值质量越好反之则RMS 越大观测期间卫星分布图形依照数理统计的理论观测值误差落在1.96倍RMS 的范围内的概率是95%n 特点及作用由于同步观测基线间具有一定的内在联系如果同步环闭合差超限但反过来还不能说明组成同步环的所有基线在质量上均合格2所谓环的闭和差有以下几类∑∆=∆XX ε∑∆=∆ZZ ε∆∆∆++=Sz y x 1222)(εεεε∑S 为环长n 异步环闭合差n 定义不是完全由同步观测基线所组成的闭合环称为异步环n 特点及作用当异步环闭合差满足限差要求时当异步环闭合差不满足限差要求时要确定出哪些基线向量的质量不合格n 重复基线较差n 定义不同观测时段就是所谓重复基线就是重复基线较差应用RATIOËüÃÇÊýÖµµÄ¸ßµÍ²»Äܾø¶ÔµÄ˵Ã÷»ùÏßÖÊÁ¿µÄ¸ßµÍÔò˵Ã÷¹Û²âÖµÖÊÁ¿½Ï²î1Ôò˵Ã÷¹Û²âÌõ¼þ½Ï²î影响GPS 基线解算结果的几个因素影响基线解算结果的因素主要有以下几条会导致基线出现尺度和方向上的偏差导致这些卫星的整周未知数无法准确确定当卫星的观测时间太短时而对与基线解算来讲如果与其相关的整周未知数没有准确确定的话有个别时间段里周跳太多多路径效应比较严重周跳修复是否完全以及多路径效应是否严重等因素二有些是较容易判别的周跳太多对流层或电离层折射影响过大等如起点坐标不准确目前还没有较容易的方法来加生别在实际工作中以避免这种情况的发只要查看观测数据的记录文件中有与每个卫星的观测数据的数量就可以了这就更直观了示例可以从基线解算后所获得的观测值残差上来大部分的基线处理软件一般采用的双差观测值与此相关的所有双差观测值的残差都会出现显著的整数倍的n 多路径效应严重对流层或电离层折射影响的判别不过与整周跳变不同的是对流层或电离层折射影响过大时而只是出现非整数倍的增大但却又明显地大于正常观测值的残差可以在进行基线解算时较为准确的起点坐标可以通过进行较长时间的单点定位或通过与WGS-84坐标较准确的点联测得到所有基线起点的坐标均由一个点坐标衍生而来然后引入系统参数的方法加以解决则可以删除该卫星的观测数据这样可以保证基线解算结果的质量则可采用删除周跳严重的时间段的方法若只是个别卫星经常发生周跳来尝试改善基线解算结果的质量因此另外n 对流层或电离层折射影响过大的应对方法对于对流层或电离层折射影响过大的问题1. 提高截止高度角但这种方法因为不一定受对流层或电离层的影响就大3. 如果观测值是双频观测值3. 基线精化处理的有力工具-残差图在基线解算时经常要判断影响基线解算结果质量的因素残差图对于完成这些工作非常有用0.000.100.10图9 残差图上图是一种常见双差分观测值残差图的形式纵轴表示观测值的残差SV12-SV15Õý³£µÄ²Ð²îͼһ°ãΪ²Ð²îÈÆ×ÅÁãÖáÉÏÏ°ڶ¯下面三个图表明SV12号卫星的观测值中含有周跳周1图11 SV12含有周跳的残差图 0.100.10图12 SV12含有周跳的残差图下面三个残差图表明SV25在21~T T 时间段内受不名因素对流层折射影响严重1.000.001.00图13 SV25受不明因素影响的残差图 残差1.000.001.00图14 SV25受不明因素影响的残差图 0.100.000.10图15 SV25受不明因素影响的残差图 第5节GPS基线解算的过程每一个厂商所生产的接收机都会配备相应的数据处理软件但是它们在使用步骤上却是大体相同的1. 原始观测数据的读入在进行基线解算时一般说来而由第三方所开发的数据处理软件则不一定能对各接收机的原始观测数据进行处理首先需要进行格式转换最常用的格式是RINEX格式大部分的数据处理软件都能直接处理就需要对观测数据进行必要的检查测站名测站坐标对这些项目进行检查的目的3. 设定基线解算的控制参数基线解算的控制参数用以确定数据处理软件采用何种处理方法来进行基线解算通过控制参数的设定4. 基线解算基线解算的过程一般是自动进行的5. 基线质量的检验基线解算完毕后还必须对基线的质量进行检验如果不合格基线的质量检验需要通过RATIO RMSÒì²½»·±ÕºÍ²îºÍÖظ´»ùÏ߽ϲîÀ´½øÐÐ。

GPS 基线解算基本理论与质量控制引言近年来,随着全球导航卫星系统(global navigation satellite system ,简称GNSS )技术的发展,GPS 技术飞速发展,从米级的导航定位到厘米的工程测量应用,再到更高等级的全球地壳形变监测,GPS 定位技术精度越来越高;此外,GPS 作业全天候,无通视要求,施测便利,GPS 技术已逐渐替代传统测量方法。
利用GPS 静态观测数据,采用事后处理GPS 软件,获取精确的定位信息。
在获取高精度的测量数据的同时,人们对于GPS 事后处理软件中基线解算质量控制越来越关注。
本文主要从基线解算的基本原理出发,讨论了基线解算分类、质量控制等内容,并使用HGO 软件解算基线并平差实例来阐述获取高精度基线向量以及基线质量控制的过程。
1 基线解算的基本原理GPS 基线向量是利用由两台或两台以上GPS 接收机所采集的同步观测数据形成的差分观测值,通过参数估计的方法计算出得两两接收机间三维坐标差。
基线向量是既具有长度特性,又具有方向特性的矢量。
基线解算就是利用多个测站的GPS 同步观测数据,确定这些测站之间坐标差的过程。
平差时所采用的观测值主要是双差值。
基线解算分为三个步骤:第一,以双差值观测方程进行初始平差,解算出整周期未知参数和基线向量的实数解;第二,将整周期未知参数固定成整数;第三,将确定的整周期数作为已知数,仅将待定的测站坐标作为未知参数,再次进行平差,解算出基线向量的最终解——整数解(固定解)。
双差观测值可以用以下公式表示:dd (f ϕ)+f v = dd (ρ)+dd (ion ρ)+ dd (trop ρ)+nm ff N ,⨯λ式中:dd (* *)为双差分因子(在i ,j 测站和卫星m,n 间求差); dd (f ϕ)为频率为f 的载波相位观测值的双差值,f v 为该双差观测值得改正数;ρ为历元t 时刻的伪距,ion ρ为电离层延迟,trop ρ为对流层延迟;f λ为频率为f 的载波相位波长;2 基线解算分类目前,基线解算可以模式可以分为单基线解模式、多基线解(时段)模式和整体解(战役)模式三钟。
GPS的基线解算及已知点兼容性检验张永军 王泽民 徐绍铨 鄢子平(武汉测绘科技大学地学测量工程学院)1 引言全球定位系统(简称GPS)是美国国防部为满足军事部门对海上、陆地和空中设施进行高精度导航和定位要求而建立的,它具有全球性、全天候、连续的精密三维导航与定位能力。
经过全世界科技工作者、仪器生产厂商的共同努力,GPS定位技术日趋成熟,而且具有自动化程度高、观测速度快、定位精度高、不受通视条件限制、抗干扰能力强等特点,从而广泛应用于测绘领域的各个部门。
而这些优点的充分发挥,GPS定位精度潜力的进一步挖掘,与作业者的正确操作及数据处理经验密切相关,例如采集外业数据时仪器的正确操作,基线解算的策略及质量控制,平差阶段多个已知点之间进行兼容性检验等。
本文结合我国南方某机场控制网的施测及数据处理过程,对GPS基线解算及网平差中的已知点兼容性检验问题进行探讨。
该网按C级精度要求,采用T rimble4000SSI双频接收机施测,测区共有8个点,共布设了8个同步环,其中GZ01为国家一等点,GZ02及GZ03为城市二等点,它们都有实测的水准数据及1954年北京坐标系坐标,中央子午线为东经113°。
基线解算采用随机的“GPSurvey Ver2.2”软件,平差则采用武汉测绘科技大学研制的“POW-ERADJ Ver3.00”软件。
2 基线解算过程及策略(1) 基线解算的一般过程GPS技术在测量中均采用相对定位技术,即确定点与点间的相对位置关系。
这种相对关系可以用某一坐标系下的三维直角坐标差( X ij, Y ij, Z ij)表示,也可以用大地坐标差( B ij, L ij, H ij)等表示。
这种点间的相对位置量称为基线向量。
基线处理的一般过程为: 读取数据。
数据可从GPS接收机读取,也可从计算机或其他存储设备读取。
观测值的预处理。
包括组成差分观测值、剔除不合格数据和周跳的探测及修复。
组成误差方程、法方程并求解未知参数。
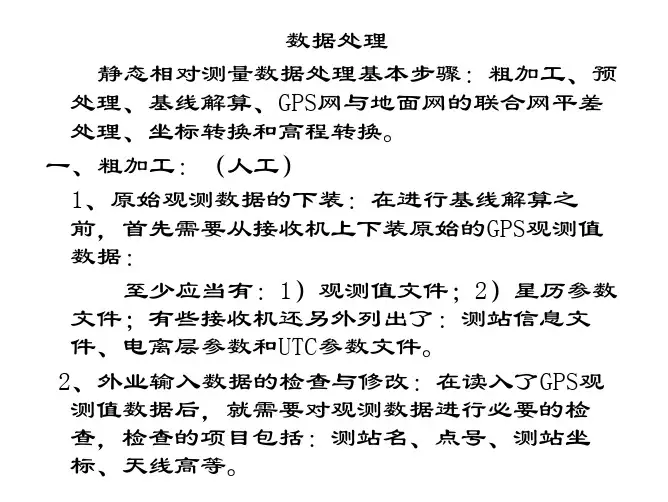
1、原始观测数据的读入
在进行基线解算时,首先需要读取原始的GPS观测值数据。
一般说来,各接收机厂商随接收机一起提供的数据处理软件都可以直接处理从接收机中传输出来的GPS原始观测值数据,而由第三方所开发的数据处理软件则不一定能对各接收机的原始观测数据进行处理,要处理这些数据,首先需要进行格式转换。
目前,最常用的格式是RINEX格式,对于按此种格式存储的数据,大部分的数据处理软件都能直接处理。
2、外业输入数据的检查与修改
在读入了GPS观测值数据后,就需要对观测数据进行必要的检查,检查的项目包括:测站名、点号、测站坐标、天线高等。
对这些项目进行检查的目的,是为了避免外业操作时的误操作。
3、设定基线解算的控制参数
基线解算的控制参数用以确定数据处理软件采用何种处理方法来进行基线解算,设定基线解算的控制参数是基线解算时的一个非常重要的环节,通过控制参数的设定,可以实现基线的精化处理。
4、基线解算
基线解算的过程一般是自动进行的,无需过多的人工干预。
5、基线质量的检验
基线解算完毕后,基线结果并不能马上用于后续的处理,还必须对基线的质量进行检验,只有质量合格的基线才能用于后续的处
理,如果不合格,则需要对基线进行重新解算或重新测量。
基线的质量检验需要通过 RATIO、RDOP、RMS、同步环闭和差、异步环闭和差和重复基线较差来进行。
6、结束。
GPS的基线解算及已知点兼容性检验本文由lc821013贡献pdf文档可能在WAP端浏览体验不佳。
建议您优先选择TXT,或下载源文件到本机查看。
6暑一GPS的基线解算及已知点兼容性检验张永军王泽泽民徐绍铨鄢子平(汉绘技学学量程院武测科大地测工学l引言797/即确定点与点间的相对位置关系。
这种相对关系可以用某一坐标系下的三维直角坐标差(X.△.A.y.△五,.)表示,可以用大地坐标差也(B△L.AT△H.等表示。
种点间的相对位,.)这置量称为基线向量。
基线处理的一般过程为:全球定位系统(称GP)美国国防部简S是为满足军事部门对海上、地和空中设施进行陆高精度导航和定位要求而建立的.具有全球它性、天候、续的精密三维导航与定位能力全连经过全世界科技工作者、仪器生产厂商的共同努力.S定位技术日趋成熟.且具有自动GP而化程度高、测速度快、位精度高、受通视观定不条件限制、干扰能力强等特点.而广泛应用抗从于测绘领域的各个部门而这些优点的充分发①读取数据。
据可从GP数S接收机读取,可从计算机或其他存储设备读取也② 观测值的预处理。
括组成差分观测包值、除不合格数据和周跳的探测及修复。
剔③数挥.S定位精度潜力的进一步挖掘.作业GP与者的正确操作及数据处理经验密切相关,如例采集外业数据时仪器的正确操作,线解算的基策略及质量控制,差阶段多个已知点之间进平行兼容性检验等组成误差方程、方程并求解未知参法确定整周未知数。
般是用概率统计一④的方法确定置信区间,出可能的值.找再根据方差最小来确定Ⅳ⑤ 反复进行前两步,到观测值残差符直合要求,最终求得基线向量的固定解。
再()解算参数的选择2①截止高度角(lvtnmak)系统Eeais:o缺省的截止高度角为l。
适当增大截止高度角5.有利于求解整周未知数及提高成果精度。
为因本文结合我国南方某机场控制网的施测及数据处理过程,GP对S基线解算及网平差中的已知点兼容性检验问题进行探讨该网按C级精度要求,用T*l40S双颧接收机采ie00SImb施测.区共有8个点,布设了8个同步环,测共其中(zl为国家一等点.Z00G2及GZ3为城0市=等点,们都有实测的水准数据及15:它4年9北京坐标系坐标.中央于午线为东经¨ 3。
GPS基线的解算模式GPS基线向量是利用2台或2台以上GPS接收机所采集的同步观测数据形成的差分观测值,通过参数估计得方法所计算出的两两接收机间的三维坐标差。
与常规地面测量中所测定的基线边长不同,基线向量是既具有长度特性又具有方向特性的矢量,而基线边长则是仅具有长度特性的标量。
基线向量主要采用空间直角坐标的坐标差的形式。
在一个基线解算结果中,可能包含很多项内容,但其中最主要的只有两项,即基线向量估值及其验后方差—协方差阵。
对于一组具有一个共同端点的同步观测基线来说,由于在进行基线解算时用到了一部分相同的观测数据(如3条同步观测基线AB、AC、AD均用到了A点的数据),数据中的误差将同时影响这些基线向量,因此,这些同步观测基线之间存在固有的统计相关性。
在进行基线解算时,应考虑这种相关性,并通过基线向量估值的方差-协方差阵加以体现,从而能最终应用于后续的网平差。
但实际上,在经常采用的各种不同基线解算模式中,并非都能满足这一要求。
另外,由于不同模式的基线解算方法在数学模型上存在一定差异,因而基线解算结果及其质量也不完全相同。
基线解算模式主要有单基线解模式、多基线解模式和整体解模式三种。
在上述三种基线解算模式中,单基线解模式(Single-Baseline Mode)是最简单也是最常用的一种。
在该模式中,基线逐条进行解算,也就是说,在进行基线解算时,一次仅同时提取2台GPS接收机的同步观测数据来解求它们之间的基线向量,当在该时段中有多台接收机进行了同步观测而需要解求多条基线时,这些基线时逐条在独立的解算过程中解求出来的。
例如,在某一时段中,共有4台GPS接收机进行了同步观测,可确定6条同步观测基线,要得到它们的解,则需要6个独立的解算过程。
在每一个完整的单基线解中,仅包含一条基线向量的结果。
由于这种基线解算模式是以基线为单位进行解算的,因而也被称为基线模式(Baseline Mode)。
单基线解模式的优点是:模型简单,一次解求的参数较少,计算量小。
GPS 基线解算基本理论与质量控制引言近年来,随着全球导航卫星系统(global navigation satellite system ,简称GNSS )技术的发展,GPS 技术飞速发展,从米级的导航定位到厘米的工程测量应用,再到更高等级的全球地壳形变监测,GPS 定位技术精度越来越高;此外,GPS 作业全天候,无通视要求,施测便利,GPS 技术已逐渐替代传统测量方法。
利用GPS 静态观测数据,采用事后处理GPS 软件,获取精确的定位信息。
在获取高精度的测量数据的同时,人们对于GPS 事后处理软件中基线解算质量控制越来越关注。
本文主要从基线解算的基本原理出发,讨论了基线解算分类、质量控制等内容,并使用HGO 软件解算基线并平差实例来阐述获取高精度基线向量以及基线质量控制的过程。
1 基线解算的基本原理GPS 基线向量是利用由两台或两台以上GPS 接收机所采集的同步观测数据形成的差分观测值,通过参数估计的方法计算出得两两接收机间三维坐标差。
基线向量是既具有长度特性,又具有方向特性的矢量。
基线解算就是利用多个测站的GPS 同步观测数据,确定这些测站之间坐标差的过程。
平差时所采用的观测值主要是双差值。
基线解算分为三个步骤:第一,以双差值观测方程进行初始平差,解算出整周期未知参数和基线向量的实数解;第二,将整周期未知参数固定成整数;第三,将确定的整周期数作为已知数,仅将待定的测站坐标作为未知参数,再次进行平差,解算出基线向量的最终解——整数解(固定解)。
双差观测值可以用以下公式表示:dd (f ϕ)+f v = dd (ρ)+dd (ion ρ)+ dd (trop ρ)+nm ff N ,⨯λ式中:dd (* *)为双差分因子(在i ,j 测站和卫星m,n 间求差); dd (f ϕ)为频率为f 的载波相位观测值的双差值,f v 为该双差观测值得改正数;ρ为历元t 时刻的伪距,ion ρ为电离层延迟,trop ρ为对流层延迟;f λ为频率为f 的载波相位波长;2 基线解算分类目前,基线解算可以模式可以分为单基线解模式、多基线解(时段)模式和整体解(战役)模式三钟。
GPS静态基线解算原理编写人:**学号: *************所在院系:测绘学院2011年5月目录1 RINEX文件命名与类型............................... - 1 - 1.1 观测文件格式.................................... - 1 -1.2 导航电文文件格式................................ - 4 -2 GPS卫星位置的计算................................. - 7 - 2.1 计算归化时间tk.................................. - 7 - 2.2 对平均运动角速度进行改正........................ - 8 - 2.3 观测时刻卫星平近点角Mk的计算................... - 8 - 2.4 计算偏近点角Ek.................................. - 8 - 2.5 真近点角Vk的计算............................... - 8 - 2.6 升交距角Φk的计算.............................. - 8 - 2.7 摄动改正项δu,δr,δi的计算.................. -8 - 2.8 计算经过摄动改正的升交距角uk、卫星矢径rk和轨道倾角ik ..................................................... -9 - 2.9 计算卫星在轨道平面坐标系的坐标.................. - 9 - 2.10 观测时刻升交点经度Ωk的计算.................... - 9 -2.11 计算卫星在地心固定坐标系中的直角坐标............ - 9 -3 GPS静态基线解算 .................................. - 9 - 3.1 载波相位测量原理................................ - 9 - 3.2 载波相位测量的观测方程......................... - 10 - 3.3 观测值的组合................................... - 11 - 3.4 在接收机和卫星间二次差......................... - 11 - 3.5 观测方程的线性化............................... - 12 -1 RINEX 文件命名与类型1.1 观测文件格式(1)观测文件的文件头如下图列出了头文件中程序里所需要的信息图1-1 rienx o 文件 表1-1 rienx o 文件头文件说明 标签描述RINEX VERSION / TYPE版本格式(2.10) 文件类型 导航系统:空格或’G’为GPS ,‘R’为GLONASS ,‘S’‘T’:‘M’为混合 APPROX POSITION XYZ 标记点概略位置(WGS84) ANTENNA: DELTA H/E/N- 天线高度:天线底部相交于标记点的高度- 天线中心相对标记点东向和北向距离(单位米)文件头观测值WA VELENGTH FACT L1/2 - L1和L2载波的缺省系数1: 整周2: 半周0 (L2载波): 单频接收机-0或空格*WAVELENGTH FACT L1/2 - L1和L2载波的缺省系数1: 整周2: 半周0 (L2载波): 单频接收机- 系数适用的卫星数据- 系数适用的卫星列表# / TYPES OF OBSERV - 文件中观测类型数量- 观测类型如果超过9种观测类型,下行继续观测类型:L1,L2: L1、L2载波相位测量C1: L1载波C/A码伪距测量P1,P2: L1,L2载波P码伪距测量D1,D2: L1、L2载波多普勒频率测量*INTERV AL 以秒为单位的观测间隔TIME OF FIRST OBS-初次观测时间(四字节年,月、日、时、分、秒)-时间系统:GPS(GPS时间系统)GLO(UTC时间系统)*TIME OF LAST OBS -最后观测时间(四字节年,月、日、时、分、秒)-时间系统:GPS(GPS时间系统)GLO(UTC时间系统)*# OF SATELLITES观测到的卫星数量*PRN / # OF OBS 不同的观测类型中,观测到的卫星数量,如果超过9种类型下行继续END OF HEADER 文件头部分的最后一行(2)、观测文件数据记录表1-2 rienx o文件观测值说明观测记录描述观测值的第一行-星历:年(2字节需要时补0) ;月,日,时,分,秒; -星历标志0:表示正常1:表示从前一历元到当前历元观测失败2: 开始移动天线3: 新地点4: 接下来是头信息5: 其它事件-当前历元的卫星数量-当前观测到的卫星列表-接收机钟差(秒,可选)-如果超过12颗卫星,下行继续事件标志:OBSERV ATIONS - 观测值- LLI- 信号强度信号强度设为 1-9级:1: 最小信号强度5: 信噪比S/N9: 最大信号强度0: 或空: 不确定1.2 导航电文文件格式图1-2 (1)、头文件格式表1-3 rinex n 文件头文件说明头文件标签 说明RINEX VERSION/TYPE -RINEX 格式的版本号-文件类型PGN/RUN BY/DA TE -创建本数据文件所采用的名称文件头文件体-创建本数据文件单位名称-创建本数据文件的日期COMMENT 注释行LON ALPHA 历书中的电离层参数A0~A3 ION BETA 历书中的电离层参数B0~B3DELTA-UTC:A0,A1,T,W 用于计算UTC时间的历书参数-A0,A1:多项式系数-T:UTC数据参考时刻-W:UTC参考周数,为连续计数,不是1024余数LEAP SECONDS 由于周跳造成的时间差END OF HEADER 文件头的最后一个记录(2)、数据记录格式表1-4 rinex n 文件头观测值说明观测值记录说明PRN号/历元/卫星钟- 卫星的PRN号- 历元:TOC(卫星钟参考时刻)年,月,日,时,分,秒- 卫星钟的偏差(s)- 卫星钟的漂移(s/s)- 卫星钟的漂移速度(s/s^2)广播轨道—1 - IDOC(数据星历发布时间)-)(mCrs-)/(sradn∆-)(radM广播轨道—2 -)(radCuc- e轨道偏心率-)(radians Cus-))((2/1mAsqrt广播轨道—3 - TOE星历的参考时刻(GPS周内的秒数)-)(radCic-))((OMEGAradΩ-)(radCis ik广播轨道—4 -)(radi-)(mCrc-)(radω-))(/(OMEGADOTsradΩ广播轨道—5 -))(/(IDOTsradi- 2L上的码- GPS周数(与TOE一同表示时间)。
第六章 GPS 基线解算第1节 G PS 基线解算的基本原理GPS 基线向量表示了各测站间的一种位置关系,即测站与测站间的坐标增量。
GPS 基线向量与常规测量中的基线是有区别的,常规测量中的基线只有长度属性,而GPS 基线向量则具有长度、水平方位和垂直方位等三项属性。
GPS 基线向量是GPS 同步观测的直接结果,也是进行GPS 网平差,获取最终点位的观测值。
一、 观测值基线解算一般采用差分观测值,较为常用的差分观测值为双差观测值,即由两个测站的原始观测值分别在测站和卫星间求差后所得到的观测值。
双差观测值可以表示为下面的形式:n m ff trop ion f f N dd dd dd v dd ,)()()()(⋅+++=+λρρρφ 其中:(...)dd 为双差分算子(在测站i ,j 和卫星m ,n 间求差);)(f dd φ为频率f 的双差载波相位观测值;f v 为频率f 的双差载波相位观测值的残差(改正数);ρ为观测历元t 时的站星距离;ion ρ为电离层延迟;trop ρ为对流层延迟;f λ为频率f 的载波相位的波长;n m fN ,为整周未知数。
若在某一历元中,对k 颗卫星数进行了同步观测,则可以得到k -1个双差观测值;若在整个同步观测时段内同步观测卫星的总数为l 则整周未知数的数量为l -1。
在进行基线解算时,ion ρ和trop ρ一般并不作为未知参数,而是通过某些方法将它们消除1。
因此,基线解算时一般只有两类参数,一类是测站的坐标参数1,3C X ,数量为32;另一1如用模型改正或双频改正。
2 在基线解算时将基线的一个端点的坐标作为已知值固定,解求另一个点。
固定的点称为起点,待求的点类是整周未知数参数1,1-m N X (m 为同步观测的卫星数),数量为1-m 。
二、 基线解算(平差)基线解算的过程实际上主要是一个平差的过程,平差所采用的观测值主要是双差观测值。
在基线解算时,平差要分三个阶段进行,第一阶段进行初始平差,解算出整周未知数参数3的和基线向量的实数解(浮动解);在第二阶段,将整周未知数固定成整数;在第三阶段,将确定了的整周未知数作为已知值,仅将待定的测站坐标作为未知参数,再次进行平差解算,解求出基线向量的最终解-整数解(固定解)。
1. 初始平差根据双差观测值的观测方程(需要进行线性化),组成误差方程后,然后组成法方程后,求解待定的未知参数其精度信息,其结果为:待定参数:⎥⎦⎤⎢⎣⎡=N C X X X待定参数的协因数阵:⎥⎥⎦⎤⎢⎢⎣⎡=N N C N N C CC X X X X X X X X Q Q Q Q Q , 单位权中误差:0ˆσ。
通过初始平差,所解算出的整周未知数参数N X 本应为整数,但由于观测值误差、随即模型和函数模型不完善等原因,使得其结果为实数,因此,此时与实数的整周未知数参数对应的基线解被称作基线向量的实数解或浮动解。
为了获得较好的基线解算结果,必须准确地确定出整周未知数的整数值。
2. 整周未知数的确定确定整周未知数的整数值的方法有很多种,目前所采用的方法基本上是以下面将要介绍的搜索法为基础的。
搜索法的具体步骤如下:1. 根据初始平差的结果N X 和NN X X D 4,分别以N X 中的每一个整周未知数为中心,以与它们中误差的若干倍5为搜索半径,确定出每一个整周未知数的一组备选整数值。
2. 从上面所确定出的每一个整周未知数的备选整数值中一次选取一个,组成整周未知数的 称为终点。
3此时所解求出的整周未知数为实数。
4N N N N X X X X Q D ⋅=20σ。
5 可根据一定的置信水平来加以确定。
备选组,并分别以它们作为已知值,代入原基线解算方程,确定出相应的基线解: []i C i X X =, []i C i C X X i Q Q =, i 0ˆσ3. 从所解算出的所有基线向量中选出产生单位权中误差最小那个基线向量结果,作为最终的解算结果,这就是所谓的基线向量整数解(或称固定解)。
[]i C i X X =, []i C i C X X i Q Q =, i 0ˆσ不过当出现以下情况时,则认为整周未知数无法确定,而无法求出该基线向量的整数解。
T ≤最小次最小00ˆˆσσ 21;,αζ-=f f F T21;,αζ-f f F 是置信水平为α-1时的F 分布的接受域,其自由度为f 和f 。
其中:最小次最小00ˆˆσσ称为RATIO 值; i 0ˆσ也被称为RMS ; )(Q tr 称为RDOP 值。
3. 确定基线向量的固定解当确定了整周未知数的整数值后,与之相对应的基线向量就是基线向量的整数解。
第2节 G PS 基线解算的分类一、 单基线解算1. 定义当有m 台GPS 接收机进行了一个时段的同步观测后,每两台接收机之间就可以形成一条基线向量,共有)1(21-⋅m m 条同步观测基线,其中最多可以选出相互独立的1-m 条同步观测基线,至于这1-m 条独立基线如何选取,只要保证所选的1-m 条独立基线不构成闭和环就可以了。
这也是说,凡是构成了闭和环的同步基线是函数相关的,同步观测所获得的独立基线虽然不具有函数相关的特性,但它们却是误差相关的,实际上所有的同步观测基线间都是误差相关的。
所谓单基线解算,就是在基线解算时不顾及同步观测基线间的误差相关性,对每条基线单独进行解算。
2. 特点单基线解算的算法简单,但由于其解算结果无法反映同步基线间的误差相关的特性,不利于后面的网平差处理,一般只用在普通等级GPS 网的测设中。
二、 多基线解1. 定义与单基线解算不同的是,多基线解算顾及了同步观测基线间的误差相关性,在基线解算时对所有同步观测的独立基线一并解算。
2. 特点多基线解由于在基线解算时顾及了同步观测基线间的误差相关特性,因此,在理论上是严密的。
第3节 基线解算阶段的质量控制一、 质量控制指标及其应用1. 质量控制指标⏹ 单位权方差因子0ˆσ⏹ 定义fPV V T =0ˆσ 其中:V 为观测值的残差;P 为观测值的权;n 为观测值的总数。
⏹ 实质单位权方差因子又称为参考因子。
⏹ 数据删除率⏹ 定义在基线解算时,如果观测值的改正数大于某一个阈值时,则认为该观测值含有粗差,则需要将其删除。
被删除观测值的数量与观测值的总数的比值,就是所谓的数据删除率。
⏹ 实质数据删除率从某一方面反映出了GPS 原始观测值的质量。
数据删除率越高,说明观测值的质量越差。
⏹ RATIO⏹ 定义RATIO RMS RMS =次最小最小显然,0.1≥RATIO⏹ 实质RATIO 反映了所确定出的整周未知数参数的可靠性,这一指标取决于多种因素,既与观测值的质量有关,也与观测条件6的好坏有关。
6 在GPS 测量中的观测条件指的是卫星星座的几何图形和运行轨迹。
⏹ RDOP⏹ 定义所谓RDOP 值指的是在基线解算时待定参数的协因数阵的迹()(Q tr )的平方根,即21))((Q tr RDOP =RDOP 值的大小与基线位置和卫星在空间中的几何分布及运行轨迹(即观测条件)有关,当基线位置确定后,RDOP 值就只与观测条件有关了,而观测条件又是时间的函数,因此,实际上对与某条基线向量来讲, 其RDOP 值的大小与观测时间段有关。
⏹ 实质RDOP 表明了GPS 卫星的状态对相对定位的影响,即取决于观测条件的好坏,它不受观测值质量好坏的影响。
⏹ RMS⏹ 定义RMS 即均方根误差(Root Mean Square ),即:1-=n V V RMS T 其中:V 为观测值的残差;P 为观测值的权;n 为观测值的总数。
⏹ 实质RMS 表明了观测值的质量,观测值质量越好,RMS 越小,反之,观测值质量越差,则RMS 越大,它不受观测条件(观测期间卫星分布图形)的好坏的影响。
依照数理统计的理论观测值误差落在1.96倍RMS 的范围内的概率是95%。
⏹ 同步环闭合差⏹ 定义同步环闭合差是由同步观测基线所组成的闭合环的闭合差7。
⏹ 特点及作用由于同步观测基线间具有一定的内在联系,从而使得同步环闭合差在理论上应总是为0的,如果同步环闭合差超限,则说明组成同步环的基线中至少存在一条基线向量是错误的,但反过来,如果同步环闭合差没有超限,还不能说明组成同步环的所有基线在质量上均合格。
7 所谓环的闭和差有以下几类:分量闭合差:∑∆=∆XX ε;∑∆=∆Y Y ε;∑∆=∆Z Z ε。
全长相对闭合差:∑∆∆∆++=S z y x 21222)(εεεε,其中:∑S 为环长。
⏹异步环闭合差⏹定义不是完全由同步观测基线所组成的闭合环称为异步环,异步环的闭合差称为异步环闭合差。
⏹特点及作用当异步环闭合差满足限差要求时,则表明组成异步环的基线向量的质量是合格的;当异步环闭合差不满足限差要求时,则表明组成异步环的基线向量中至少有一条基线向量的质量不合格,要确定出哪些基线向量的质量不合格,可以通过多个相邻的异步环或重复基线来进行。
⏹重复基线较差⏹定义不同观测时段,对同一条基线的观测结果,就是所谓重复基线。
这些观测结果之间的差异,就是重复基线较差。
二、应用RATIO、RDOP和RMS这几个质量指标只具有某种相对意义,它们数值的高低不能绝对的说明基线质量的高低。
若RMS偏大,则说明观测值质量较差8,若RDOP值较大,则说明观测条件较差。
第4节影响GPS基线解算结果的几个因素及其应对方法一、影响GPS基线解算结果的几个因素影响基线解算结果的因素主要有以下几条:⏹基线解算时所设定的起点坐标不准确起点坐标不准确,会导致基线出现尺度和方向上的偏差。
⏹少数卫星的观测时间太短,导致这些卫星的整周未知数无法准确确定当卫星的观测时间太短时,会导致与该颗卫星有关的整周未知数无法准确确定,而对与基线解算来讲,对于参与计算的卫星,如果与其相关的整周未知数没有准确确定的话,就将影响整个⏹在整个观测时段里,有个别时间段里周跳太多,致使周跳修复不完善⏹在观测时段内,多路径效应比较严重,观测值的改正数普遍较大⏹对流层或电离层折射影响过大8观测值质量的好坏取决于接收机的测相精度的高低,周跳修复是否完全,对流层和电离层延迟的影响是否完全消除,以及多路径效应是否严重等因素。
二、影响GPS基线解算结果因素的判别及应对措施1. 影响GPS基线解算结果因素的判别⏹概述对于影响GPS基线解算结果因素,有些是较容易判别的,如卫星观测时间太短、周跳太多、多路径效应严重、对流层或电离层折射影响过大等;但对于另外一些因素却不好判断了,如起点坐标不准确。
⏹基线起点坐标不准确的判别对于由起点坐标不准确所对基线解算质量造成的影响,目前还没有较容易的方法来加以判别,因此,在实际工作中,只有尽量提高起点坐标的准确度,以避免这种情况的发生。