半带FIR低通滤波器
- 格式:doc
- 大小:1.37 MB
- 文档页数:12
fir滤波器的设计方法一、引言二、基本概念1.数字信号2.离散时间信号3.FIR滤波器三、FIR滤波器的设计方法1.窗函数法(1)矩形窗函数法(2)汉宁窗函数法(3)汉明窗函数法(4)布莱克曼窗函数法2.最小二乘法3.频率抽样法四、FIR滤波器设计实例五、总结一、引言数字信号处理在现代通信技术中得到了广泛的应用,其中滤波器是数字信号处理的重要组成部分。
FIR滤波器是一种常用的数字滤波器,具有无限冲击响应和线性相位特性。
本文将介绍FIR滤波器的基本概念和设计方法,并给出一个实例。
二、基本概念1.数字信号数字信号是在时间轴上取样后离散化的模拟信号。
在计算机中,数字信号由一系列离散的数值表示。
2.离散时间信号离散时间信号是以时间为自变量且取值为离散值的函数。
通常使用序列表示,如x(n)。
3.FIR滤波器FIR滤波器是一种数字滤波器,其系统函数是有限长冲击响应的线性时不变系统。
FIR滤波器的输出只与当前和过去的输入有关,与未来的输入无关。
FIR滤波器具有无限冲击响应和线性相位特性。
三、FIR滤波器的设计方法1.窗函数法窗函数法是一种常用的FIR滤波器设计方法。
它通过在频域上对理想低通滤波器进行截止频率处理得到所需的频率响应,并使用窗函数将其转换为时域上的序列。
(1)矩形窗函数法矩形窗函数法是最简单的FIR滤波器设计方法。
它将理想低通滤波器在频域上乘以一个矩形窗函数,得到所需频率响应后再进行反变换得到时域上的系数序列。
(2)汉宁窗函数法汉宁窗函数法是一种常用的FIR滤波器设计方法。
它将理想低通滤波器在频域上乘以一个汉宁窗函数,得到所需频率响应后再进行反变换得到时域上的系数序列。
(3)汉明窗函数法汉明窗函数法是一种常用的FIR滤波器设计方法。
它将理想低通滤波器在频域上乘以一个汉明窗函数,得到所需频率响应后再进行反变换得到时域上的系数序列。
(4)布莱克曼窗函数法布莱克曼窗函数法是一种常用的FIR滤波器设计方法。
电子科技大学信息与软件工程学院学院标准实验报告(实验)课程名称数字信号处理电子科技大学教务处制表电 子 科 技 大 学实 验 报 告学生姓名: 学 号: 指导教师: 实验地点: 实验时间:14-18一、实验室名称:计算机学院机房 二、实验项目名称:fir 低通滤波器的设计 三、实验学时: 四、实验原理:1. FIR 滤波器FIR 滤波器是指在有限范围内系统的单位脉冲响应h[k]仅有非零值的滤波器。
M 阶FIR 滤波器的系统函数H(z)为()[]Mkk H z h k z-==∑其中H(z)是kz-的M 阶多项式,在有限的z 平面内H(z)有M 个零点,在z平面原点z=0有M 个极点.FIR 滤波器的频率响应()j H e Ω为 0()[]Mj jk k H e h k e Ω-Ω==∑它的另外一种表示方法为()()()j j j H e H e e φΩΩΩ=其中()j H e Ω和()φΩ分别为系统的幅度响应和相位响应。
若系统的相位响应()φΩ满足下面的条件()φαΩ=-Ω即系统的群延迟是一个与Ω没有关系的常数α,称为系统H(z)具有严格线性相位。
由于严格线性相位条件在数学层面上处理起来较为困难,因此在FIR 滤波器设计中一般使用广义线性相位。
如果一个离散系统的频率响应()j H e Ω可以表示为()()()j j H e A e αβΩ-Ω+=Ω其中α和β是与Ω无关联的常数,()A Ω是可正可负的实函数,则称系统是广义线性相位的。
如果M 阶FIR 滤波器的单位脉冲响应h[k]是实数,则可以证明系统是线性相位的充要条件为[][]h k h M k =±-当h[k]满足h[k]=h[M-k],称h[k]偶对称。
当h[k]满足h[k]=-h[M-k],称h[k]奇对称。
按阶数h[k]又可分为M 奇数和M 偶数,所以线性相位的FIR 滤波器可以有四种类型。
2. 窗函数法设计FIR 滤波器窗函数设计法又称为傅里叶级数法。
数字信号处理课程设计题目低通等波纹FIR滤波器学院名称电气工程学院指导教师班级电子班学号学生姓名2011年06月目录摘要---------------------------------------------------- 3 1前言-------------------------------------------------- 4 2数字滤波器的基本概念介绍------------------------------ 4 2.1滤波的含义------------------------------------------ 4 2.2数字滤波器概述-------------------------------------- 4 2.3数字滤波器的实现方法-------------------------------- 5 2.4 .数字滤波器的可实现性------------------------------ 5 2.5数字滤波器的分类------------------------------------ 52. 6 FIR滤波器简介及其优点---------------------------- 53 .等波纹最佳逼近法的原理说明---------------------------8 3.1等波纹最佳逼近法概述-------------------------------- 8 3.2.等波纹最佳逼近法基本思想---------------------------- 93.3等波纹滤波器的技术指标及其描述参数介绍--------------- 94.基于MATLAB的数字低通FIR最佳等波纹的实现-------------- 10 4.1用matlab编程实现------------------------------------ 10 4.2使用FDA工具箱设计FIR低通滤波器-------------------- 12 4.3借助FDA工具箱分析字长对滤波器性能的影响------------ 14 4.4不同结构对滤波器性能的影响分析---------------------- 20 心得体会------------------------------------------------ 29摘要:在要求严格线性相位的系统,需要采用FIR数字滤波器。
FIR滤波器设计要点FIR (Finite Impulse Response) 滤波器是一种数字滤波器,其设计要点包括滤波器类型选择、滤波器系数设计、频率响应规格、窗函数和滤波器长度选择等。
以下是对这些要点的详细介绍。
1.滤波器类型选择:在设计FIR滤波器之前,需要确定滤波器的类型。
常见的FIR滤波器类型包括低通滤波器、高通滤波器、带通滤波器和带阻滤波器。
不同类型的滤波器适用于不同的应用场景,因此在选择滤波器类型时需要考虑系统的需求。
2.滤波器系数设计:FIR滤波器的核心是滤波器系数。
滤波器系数决定了滤波器的频率响应和滤波特性。
常用的设计方法包括窗函数法、最小均方误差法和频率抽样法等。
窗函数法是最常用的设计方法,其基本思想是通过选择合适的窗函数来得到滤波器系数。
3.频率响应规格:在设计FIR滤波器时,需要明确所需的频率响应规格,包括通带增益、阻带衰减、过渡带宽等。
这些规格直接影响了滤波器的性能,因此需要根据具体应用场景来确定。
4.窗函数选择:窗函数在FIR滤波器设计中起到了重要的作用。
常用的窗函数包括矩形窗、汉宁窗、汉明窗、布莱克曼窗等。
不同的窗函数具有不同的特性,选择合适的窗函数可以得到优良的滤波器性能。
5.滤波器长度选择:滤波器长度决定了滤波器的频率分辨率和时间分辨率。
滤波器长度越长,频率响应越尖锐,但计算复杂度也越高。
因此,在设计FIR滤波器时需要权衡计算复杂度和性能要求,选择合适的滤波器长度。
6.优化设计:7.实现方式:总之,设计FIR滤波器要点包括滤波器类型选择、滤波器系数设计、频率响应规格、窗函数和滤波器长度选择等。
设计者需要根据具体的应用场景和性能要求来进行合理的设计和优化,以满足系统的需求。
基于DSP实现的FIR低通滤波器FIR(有限脉冲响应)低通滤波器是一种常见的数字信号处理(DSP)滤波器。
它的设计和实现非常灵活,可以用于去除数字信号中高频成分,使得信号能在一定的频率范围内进行平滑处理。
FIR低通滤波器有很多种设计方法,其中最简单的方法是基于窗函数设计,例如矩形窗、汉宁窗、布莱克曼窗等。
这些窗函数的选择取决于滤波器的性能要求和频率响应的形状。
在DSP中,FIR低通滤波器的实现可以采用直接形式、级联形式、并行形式和迭代形式等多种结构。
其中直接形式是最简单和直观的实现方式,也是最容易理解和实现的一种结构。
直接形式的FIR低通滤波器由一个延迟线、一组乘法器和加法器组成。
延迟线用于延迟输入信号,乘法器用于对延迟后的信号进行调制,而加法器则将调制后的信号相加得到输出信号。
```----------------------,,,x(n) -->, Delay ,-->, Multiply,-->--+ Sum ,--> y(n)Line ,,,----------------------```在实现过程中,需要注意的是延迟线的设置和乘法器的系数。
延迟线的长度决定了滤波器的阶数,即滤波器对输入信号的响应范围。
乘法器的系数则决定了滤波器的频率响应,可以通过窗函数的选取来确定。
通常,FIR滤波器的实现可以通过查表法或者卷积法来实现。
查表法通过预先计算所有可能的输入组合,并将其存储在一张查找表中,以减少计算量。
卷积法则通过将输入信号和滤波器的冲击响应进行卷积运算来得到输出信号。
当实现FIR低通滤波器时,还需要考虑滤波器的性能指标和算法的优化。
常见的性能指标包括滤波器的截止频率、抗混叠性能、通带和阻带的幅频特性等。
算法的优化可以从以下几个方面考虑:乘法器的系数选择、滤波器结构的选择、滤波器长度的选择和存储器的优化等。
总之,基于DSP实现的FIR低通滤波器是一种常用的数字信号处理滤波器,它可以用于去除数字信号中的高频成分,平滑信号的频谱。
fir滤波器原理
滤波器是一种用于改变信号频率内容的电子或数字设备。
FIR 滤波器是一种常见的数字滤波器,其工作原理基于离散时间信号的有限脉冲响应(Finite Impulse Response,简称FIR)。
FIR滤波器的工作原理如下:首先,输入信号通过FIR滤波器的输入端,经过一系列的延迟操作。
延迟操作将信号的各个采样值按照规定的时间间隔向后移动,形成了一系列的延迟输入信号。
接下来,这些延迟输入信号与滤波器的一组系数相乘,得到一组乘积。
这些乘积值随后被相加,形成最终的输出信号。
这一过程称为卷积操作,其结果是通过不同延迟输入信号与滤波器系数的加权和获得的输出信号。
FIR滤波器的特点是具有线性相位响应和稳定性。
线性相位响应意味着FIR滤波器对不同频率的信号都能够实现同样的延迟,从而不会导致信号的相位失真。
稳定性指的是滤波器在任何输入情况下都能够产生有限的输出,而不会出现无界的振荡或爆炸。
FIR滤波器的设计方法可以通过指定所需的频率响应来实现。
常见的设计方法包括窗函数法、最佳线性逼近法等。
窗函数法通过选择适当的窗函数和截断长度,来实现对滤波器频率响应的控制。
最佳线性逼近法则通过最小化实际输出与所需输出之间的误差来设计滤波器。
总之,FIR滤波器通过延迟、加权和卷积等操作,对输入信号进行滤波处理,达到改变其频率内容的目的。
这种滤波器具有线性相位响应和稳定性,并可以通过不同设计方法来实现所需的频率响应。
河北科技大学课程设计报告学生姓名: 学号:专业班级:课程名称:学年学期指导教师:20年月课程设计成绩评定表目录1. 窗函数设计低通滤波器1.1设计目的 (1)1.2设计原理推导与计算 (1)1.3设计内容与要求 (2)1.4设计源程序与运行结果 (3)1.5思考题……………………………………………………………………101.6心得体会 (14)参考文献……………………………………………………………………… 151.窗函数设计低通滤波器1.1设计目的1. 熟悉设计线性相位数字滤波器的一般步骤。
2. 掌握用窗函数法设计FIR 数字滤波器的原理和方法。
3. 熟悉各种窗函数的作用以及各种窗函数对滤波器特性的影响。
4. 学会根据指标要求选择合适的窗函数。
1.2设计原理推导与计算如果所希望的滤波器的理想的频率响应函数为()ωj d e H ,则其对应的单位脉冲响应为()()ωπωωππd e e H n h j j d d ⎰-=21 (4.1)窗函数设计法的基本原理是设计设计低通FIR 数字滤波器时,一般以理想低通滤波特性为逼近函数()ωj e H ,即()⎪⎩⎪⎨⎧≤<≤=-πωωωωωαωc c j jd ,,e e H 0,其中21-=N α()()()[]()a n a n d e e d e eH n h c j j j j d d cc--===⎰⎰---πωωπωπωαωωωαωππωsin 2121用有限长单位脉冲响应序列()n h 逼近()n h d 。
由于()n h d 往往是无限长序列,而且是非因果的,所以用窗函数()n ω将()n h d 截断,并进行加权处理,得到:()()()n n h n h d ω=(4.2)()n h 就作为实际设计的FI R数字滤波器的单位脉冲响应序列,其频率响应函数()ωj e H 为()()nj N n j en h eH ωω∑-==1ﻩ ﻩ(4.3)式中,N 为所选窗函数()n ω的长度。
fir低通滤波器原理低通滤波器原理一、什么是低通滤波器低通滤波器(LPF)是一种输入信号在指定的频率范围内阻抗为高的滤波器。
它能够有效地抑制较高频率的输入信号,从而只保留较低频率信号,增强信号低频部分的特征,例如:增强低频声音信号提取出人声信号,以及视频信号提取出高清图像。
二、低通滤波器的作用1. 降噪和抑制高频干扰。
低通滤波器可以抑制高于某一特定频率的信号,从而减少输出信号中的噪声和其他干扰,使输出信号的质量更高、更清晰。
2. 细节处理。
低通滤波器可以提取出较低频率的信号,使信号有更多的细节,从而更容易被人们理解。
3. 低频增强。
低通滤波器可以增强低频信号,使低频声音更清晰、更柔和,以及视频信号更细腻、更柔和。
三、低通滤波器的工作原理低通滤波器的工作原理是在特定的截止频率(也称为滤料频率)及其以下的频率信号被有效地通过滤波器,而该频率以上的频率信号被滤波器有效地抑制。
这意味着滤波器在特定的截止频率以上的信号,有效地降低其强度,从而使输出信号低频部分比输入信号强度更高。
四、低通滤波器的类型1. 振荡滤波器(Oscillator Filter)振荡滤波器是一种由震荡电路构成的滤波器,它的两种常见的类型是双稳态振荡滤波器(BFO)和双动态振荡滤波器(BDE)。
它们都执行同样的功能,即通过反馈电路构成的振荡电路来实现低通滤波效果,从而实现高质量的低频信号。
2. 卷积滤波器(Convolution Filters)卷积滤波器是由单独的一段信号与待处理信号的积分求和运算构成的一种滤波器。
它的特点比较灵活,支持多种不同类型的滤波器,比如:低通滤波器、带通滤波器和高通滤波器等,并且支持设计更复杂的滤波器。
3. 周期滤波器(Periodic Filters)周期滤波器是通过模拟周期滤波器的机制来实现低通滤波效果的一种滤波器。
它以用户定义的一组振幅、相位和频率为基础,创建一组周期函数,然后将待处理信号的周期性构造与之匹配,从而实现低通滤波的效果。
FIR低通滤波器设计一、FIR低通滤波器的设计原理FIR低通滤波器是通过截断滤波器的频率响应来实现的。
设计过程中,需要确定滤波器的截止频率和滤波器的阶数。
阶数越高,滤波器的性能越好,但需要更多的计算资源。
截止频率决定了滤波器的带宽,对应于滤波器的3dB截止频率。
低通滤波器将高频部分去除,只保留低频部分。
二、FIR低通滤波器的设计步骤1.确定滤波器的阶数N:根据滤波器的性能要求,确定阶数N,一般通过试验和优化得到。
2.确定滤波器的截止频率:根据所需的频率特性,确定滤波器的截止频率,可以根据设计要求选择合适的截止频率。
3. 建立理想的频率响应:根据滤波器的类型和截止频率,建立理想的频率响应,例如矩形窗、Hamming窗等。
4.通过傅里叶反变换得到滤波器的冲激响应:将建立的理想频率响应进行傅里叶反变换,得到滤波器的冲激响应。
5.通过采样和量化得到滤波器的离散系数:根据采样频率和滤波器的冲激响应,得到滤波器的离散系数。
6.实现滤波器:利用离散系数和输入信号进行卷积运算,得到滤波器的输出信号。
三、常用的FIR低通滤波器设计方法1.矩形窗设计法:矩形窗设计法是一种简单的设计方法,通过选择合适的滤波器阶数和截止频率,利用离散傅里叶变换求解滤波器的系数。
矩形窗设计法的优点是简单易用,但是频率响应的副瓣比较高。
2. Hamming窗设计法:Hamming窗设计法是一种常用的设计方法,通过选择合适的滤波器阶数和截止频率,利用离散傅里叶变换求解滤波器的系数。
Hamming窗设计法可以减小副瓣,同时保持主瓣较窄。
3. Parks-McClellan算法:Parks-McClellan算法是一种常用的优化设计方法,通过最小化滤波器的最大截止误差来得到滤波器的系数。
Parks-McClellan算法可以得到相对较好的频率响应,但是计算量较大。
四、总结FIR低通滤波器设计是数字信号处理中的关键任务之一、设计滤波器的阶数和截止频率是设计的关键步骤,采用不同的设计方法可以得到不同的滤波器性能。
FIR低通滤波器的设计低通滤波器是一种常见的信号处理工具,它可以将高频信号从输入信号中滤除,只留下低频信号。
在很多应用中,低通滤波器被用于去除噪声、平滑信号、降低带宽等。
设计一个低通滤波器需要考虑多个因素,包括滤波器类型、阶数、截止频率、群延迟等。
以下是设计低通滤波器的步骤:1. 确定滤波器类型:首先需要选择滤波器的类型,常见的低通滤波器有巴特沃斯(Butterworth)、切比雪夫(Chebyshev)、椭圆(Elliptic)等。
每种类型的滤波器有不同的特性和设计参数,选择合适的类型取决于具体的应用需求。
2.确定滤波器阶数:滤波器的阶数与其滤波特性的平滑程度有关,阶数越高,滤波曲线越陡峭。
一般来说,阶数越高,滤波器设计越复杂,实现难度也越大。
选择适当的阶数需要在设计要求和性能之间进行平衡。
3.确定截止频率:截止频率是指滤波器在此频率以下开始滤除高频信号的频率。
确定截止频率需要考虑到信号中的有用频率范围以及滤波器对信号的影响。
需要注意的是,低通滤波器的截止频率应该小于采样频率的一半,否则会导致混叠效应。
4.根据以上参数进行滤波器设计:根据选择的滤波器类型、阶数和截止频率,可以利用不同的设计方法进行滤波器设计。
常用的设计方法有频率变换法、零极点法、传递函数设计法等。
这些方法可以通过数学计算或者使用相关软件进行设计。
5.实现滤波器:设计好滤波器后,需要将其实现到具体的系统中。
这通常涉及到电子电路、数字信号处理器(DSP)或者软件实现。
具体的实现方式取决于应用要求和所使用的平台。
在设计低通滤波器时,还需要考虑一些其他因素,例如群延迟、通带波动、阻带抑制等。
群延迟是指滤波器对不同频率的信号引起的延迟差异,通常希望群延迟尽可能平均,以避免引起相移问题。
通带波动是指滤波器在通带内的幅频响应变化情况,阻带抑制是指滤波器在阻带内对高频信号的抑制能力。
总结来说,低通滤波器设计是一个综合考虑信号需求、滤波器特性和实现条件的过程。
F I R数字低通滤波器设计(总14页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--第1章 绪论设计的作用、目的课程设计是理论学习的延伸,是掌握所学知识的一种重要手段,对于贯彻理论联系实际、提高学习质量、塑造自身能力等于有特殊作用。
本次课程设计一方面通过MATLAB 仿真设计内容,使我们加深对理论知识的理解,同时增强其逻辑思维能力,另一方面对课堂所学理论知识作一个总结和补充。
设计任务及要求通过课程设计各环节的实践,应使学生达到如下要求:1.掌握双线性变换法及脉冲响应不变法设计IIR 数字滤波器以及窗函数法 设计FIR 数字滤波器的原理、具体方法及计算机编程。
2.观察双线性变换法、脉冲响应不变法及窗函数法设计的滤波器的频域特性,了解各种方法的特点。
3.用MATLAB 画出三种方法设计数字滤波器的幅频特性曲线,记带宽和衰减量,检查结果是否满足要求。
设计内容设计题目:FIR 数字滤波器的设计 设计内容:(1)设计一线性相位FIR 数字低通滤波器,截止频率π2.0=Ωf ,过渡带宽度 π4.0≤∆Ω,阻带衰减dB A s 30>。
(2)设计一线性相位FIR 数字低通滤波器,截止频率π2.0=Ωf ,过渡带宽度π4.0≤∆Ω,阻带衰减dB A s 50>。
第2章FIR 数字低通滤波器的原理数字低通滤波器的设计原理FIR 数字滤波器传统的设计方法有窗函数法、频率抽样法和等波纹逼近法。
用窗函数设计FIR 数字滤波器就是用有限长的脉冲相应逼近序列,其基本设计思想为:首先选定一个理想的选频滤波器,然后截取它的脉冲响应得到线性相位。
滤波器(filter ),是一种用来消除干扰杂讯的器件,将输入或输出经过过滤而得到纯净的直流电。
对特定频率的频点或该频点以外的频率进行有效滤除的电路,就是滤波器,其功能就是得到一个特定频率或消除一个特定频率。
就是允许某一部分频率的信号顺利的通过,而另外一部分频率的信号则受到较大的抑制,它实质上是一个选频电路。
fir滤波器计算公式FIR滤波器(Finite Impulse Response Filter)是一种数字滤波器,它采用有限长度的冲激响应序列作为滤波器的系数。
FIR滤波器具有线性相位特性,可以实现任意频率响应。
其计算公式包括设计方法、频率响应、转移函数和系统函数等方面。
1.设计方法:FIR滤波器的设计方法主要有窗函数法、最小二乘法、频率采样法和优化算法等。
窗函数法是最常用的一种方法,它通过选择不同的窗函数对理想滤波器的频域响应进行窗函数逼近,从而得到FIR滤波器的系数。
2.频率响应:FIR滤波器的频率响应描述了滤波器在不同频率下的增益和相位变化情况。
一般情况下,FIR滤波器的频率响应是一个线性相位的低通、高通、带通或带阻滤波器。
频率响应可以通过滤波器的冲激响应序列进行计算,其中每个样点乘以相应的频率值,然后进行离散傅里叶变换(DFT)得到频率响应。
3.转移函数:FIR滤波器的转移函数可以通过滤波器的系数计算得到。
假设FIR滤波器的输入为x(n),输出为y(n),滤波器的系数为h(n),则滤波器的转移函数H(z)可以表示为:H(z)=h(0)+h(1)z^(-1)+h(2)z^(-2)+...+h(N)z^(-N)其中,N为滤波器的阶数。
4.系统函数:FIR滤波器的系统函数是指输入和输出之间的关系。
在时域中,FIR 滤波器的系统函数可以表示为:y(n)=h(0)x(n)+h(1)x(n-1)+h(2)x(n-2)+...+h(N)x(n-N)其中,h(n)为滤波器的系数。
FIR滤波器的计算公式主要涵盖了设计方法、频率响应、转移函数和系统函数等方面。
通过这些公式,可以对FIR滤波器的性能进行分析和设计,从而满足实际应用中的不同需求。
fir低通滤波器计算引言:数字滤波器在信号处理中起着至关重要的作用。
其中,低通滤波器是一种常用的滤波器类型,用于去除信号中的高频成分,提取出较低频率的信号。
本文将介绍fir低通滤波器的计算原理和步骤,并通过实例进行说明。
一、fir低通滤波器简介fir(Finite Impulse Response)低通滤波器是一种无限长冲激响应滤波器,其特点是有限的输入信号产生有限的输出响应。
fir低通滤波器通过对输入信号进行加权平均,滤除高频成分,保留低频成分。
二、fir低通滤波器的计算步骤1. 确定滤波器的阶数和截止频率:阶数决定了滤波器的复杂程度,截止频率决定了滤波器的频率范围。
2. 设计滤波器的频率响应曲线:可以使用窗函数、最小二乘法等方法设计fir滤波器的频率响应曲线。
3. 计算滤波器的冲激响应:根据设计的频率响应曲线,通过傅里叶逆变换计算滤波器的冲激响应。
4. 对冲激响应进行归一化:将冲激响应的幅值归一化,使得滤波器的增益为1。
5. 计算滤波器的系数:根据归一化后的冲激响应,计算滤波器的系数。
三、fir低通滤波器的实例计算假设我们要设计一个阶数为10的fir低通滤波器,截止频率为2kHz。
下面是具体的计算步骤:1. 确定滤波器的阶数和截止频率:阶数为10,截止频率为2kHz。
2. 设计滤波器的频率响应曲线:可以选择矩形窗函数作为频率响应曲线。
3. 计算滤波器的冲激响应:对矩形窗函数进行傅里叶逆变换,得到滤波器的冲激响应。
4. 对冲激响应进行归一化:将冲激响应的幅值归一化。
5. 计算滤波器的系数:根据归一化后的冲激响应,计算滤波器的系数。
通过以上步骤,我们可以得到滤波器的系数。
然后,我们可以将待滤波的信号与滤波器的系数进行卷积运算,得到滤波后的信号。
四、总结fir低通滤波器是一种常用的数字滤波器,用于去除信号中的高频成分,提取出较低频率的信号。
本文介绍了fir低通滤波器的计算步骤,并通过实例进行了说明。
FIR滤波器FIR的结构FIR(Finite Impulse Response)滤波器:有限长单位冲激响应滤波器,是数字信号处理系统中最基本的元件,它可以在保证任意幅频特性的同时具有严格的线性相频特性,同时其单位抽样响应是有限长的,因而滤波器是稳定的系统。
因此,FIR滤波器在通信、图像处理、模式识别等领域都有着广泛的应用。
目录一、FIR滤波器的种类二、FIR的特点一、FIR滤波器的种类二、FIR的特点展开编辑本段一、FIR滤波器的种类目前,FIR滤波器的硬件实现有以下几种方式:1.1、数字集成电路FIR滤波器一种是使用单片通用数字滤波器集成电路,这种电路使用简单,但是由于字长和阶数的规格较少,不易完全满足实际需要。
虽然可采用多片扩展来满足要求,但会增加体积和功耗,因而在实际应用中受到限制。
1.2、DSP芯片FIR滤波器另一种是使用DSP芯片。
DSP芯片有专用的数字信号处理函数可调用,实现FIR滤波器相对简单,但是由于程序顺序执行,速度受到限制。
而且,就是同一公司的不同系统的DSP芯片,其编程指令也会有所不同,开发周期较长。
1.3、可编程FIR滤波器还有一种是使用可编程逻辑器件,FPGA/CPLD。
FPGA有着规整的内部逻辑块整列和丰富的连线资源,特别适合用于细粒度和高并行度结构的FIR 滤波器的实现,相对于串行运算主导的通用DSP芯片来说,并行性和可扩展性都更好。
编辑本段二、FIR的特点有限长单位冲激响应(FIR)滤波器有以下特点:(1) 系统的单位冲激响应h (n)在有限个n值处不为零;(2) 系统函数H(z)在|z|>0处收敛,极点全部在z = 0处(因果系统);(3) 结构上主要是非递归结构,没有输出到输入的反馈,但有些结构中(例如频率抽样结构)也包含有反馈的递归部分。
设FIR滤波器的单位冲激响应h (n)为一个N点序列,0 ≤n ≤ N —1,则滤波器的系统函数为H(z)=∑h(n)*z^-n就是说,它有(N—1)阶极点在z = 0处,有(N—1)个零点位于有限z平面的任何位置。
低通FIR数字滤波器设计(1)设计方案本设计利用窗函数法设计了一个低通FIR数字滤波器,利用所设计的滤波器对多个频带叠加的正弦信号进行处理,对比滤波前后的信号时域和频域图。
FIR 滤波器具有严格的相位特性,对于信号处理和数据传输是很重要的。
目前FIR滤波器的设计方法主要有三种:窗函数法、频率取样法和切比雪夫等波纹逼近的最优化设计方法。
由于窗函数法比较简单,可应用现成的窗函数公式,在技术指标要求高的时候是比较灵活方便的,本设计方案选用窗函数法基本思路:从时域出发设计 h(n)逼近理想 hd(n)。
设理想滤波器的单位响应在时域表达为hd(n),则hd(n) 一般是无限长的,且是非因果的,不能直接作为FIR 滤波器的单位脉冲响应。
要想得到一个因果的有限长的滤波器单位抽样响应 h(n),最直接的方法是先将hd(n)往右平移,再进行截断,即截取为有限长因果序列:h(n)=hd(n)w(n),并用合适的窗函数进行加权作为 FIR 滤波器的单位脉冲响应。
按照线性相位滤波器的要求,线性相位FIR数字低通滤波器的单位抽样响应h(n)必须是偶对称的。
对称中心必须等于滤波器的延时常数,即用矩形窗设计的FIR 低通滤波器,所设计滤波器的幅度函数在通带和阻带都呈现出振荡现象,且最大波纹大约为幅度的9%,返个现象称为吉布斯(Gibbs)效应。
为了消除吉布斯效应,一般采用其他类型的窗函数。
MATLAB 设计 FIR 滤波器有多种方法和对应的函数。
从根本上讲,使用窗函数的目的就是消除由无限序列的截短而引起的Gibbs现象所带来的影响。
(2)MATLAB程序设计和仿真图MATLAB程序如下:f1=100;f2=200;%待滤波正弦信号频率fs=2000;%采样频率m=(0.3*f1)/(fs/2);%定义过度带宽M=round(8/m);%定义窗函数的长度N=M-1;%定义滤波器的阶数b=fir1(N,0.5*f2/(fs/2));%使用fir1函数设计滤波器%输入的参数分别是滤波器的阶数和截止频率figure(1)[h,f]=freqz(b,1,512);%滤波器的幅频特性图%[H,W]=freqz(B,A,N)当N是一个整数时函数返回N点的频率向量和幅频响应向量plot(f*fs/(2*pi),20*log10(abs(h)))%参数分别是频率与幅值xlabel('频率/赫兹');ylabel('增益/分贝');title('滤波器的增益响应');figure(2)subplot(211)t=0:1/fs:0.5;%定义时间范围和步长s=sin(2*pi*f1*t)+sin(2*pi*f2*t);%滤波前信号plot(t,s);%滤波前的信号图像xlabel('时间/秒');ylabel('幅度');title('信号滤波前时域图');subplot(212)Fs=fft(s,512);%将信号变换到频域AFs=abs(Fs);%信号频域图的幅值f=(0:255)*fs/512;%频率采样plot(f,AFs(1:256));%滤波前的信号频域图xlabel('频率/赫兹');ylabel('幅度');title('信号滤波前频域图');figure(3)sf=filter(b,1,s);%使用filter函数对信号进行滤波%输入的参数分别为滤波器系统函数的分子和分母多项式系数向量和待滤波信号输入subplot(211)plot(t,sf)%滤波后的信号图像xlabel('时间/秒');ylabel('幅度');title('信号滤波后时域图');axis([0.2 0.5 -2 2]);%限定图像坐标范围subplot(212)Fsf=fft(sf,512);%滤波后的信号频域图AFsf=abs(Fsf);%信号频域图的幅值f=(0:255)*fs/512;%频率采样plot(f,AFsf(1:256))%滤波后的信号频域图xlabel('频率/赫兹');ylabel('幅度');title('信号滤波后频域图');低通的FIR数字滤波器的仿真图如图8~图10所示:图8低通FIR滤波器的增益响应图9 滤波前的信号时域图和频域图图10 滤波后的信号时域图和频域图。
数字信号处理课程设计设计题目半带FIR低通滤波器设计题目编号 0205 学院名称电气学院指导教师班级学号学生姓名目录一.半带滤波器的概述 (1)二.半带FIR滤波器的性质及设计方法 (1)2.1半带FIR滤波器的性质 (1)2.2半带滤波器的设计方法 (2)2.3滤波器指标的确定 (3)2.4手工计算 (4)三.在MATLAB中仿真 (4)3.1滤波器的系数 (4)3.2半带FIR滤波器的频率特性曲线 (4)3.3基于MATLAB的幅频响应曲线 (5)四.滤波器的结构不同对性能指标的影响 (6)4.1利用直接型结构构建滤波器 (6)4.2利用级联型结构构建数字滤波器 (7)五.参数字长对性能指标的影响 (8)5.1参数字长取2位对性能指标的影响 (8)5.2参数字长取8位对性能指标的影响 (8)5.3参数字长取12位对性能指标的影响 (9)5.4参数字长取14位对性能指标的影响 (9)5.5结论 (9)六.心得体会 (9)七.参考文献 (10)八.附录 (10)1半带FIR 低通滤波器的设计一.半带滤波器的概述在数字滤波器的设计过程中,为了能够有效地进行抽取滤波,往往采用多级抽取的方法,这就需要采用内插和抽取的原理。
如果对滤波器进行M 倍抽取,则输出的采样频率是输入采样频率的I /M ;如果对滤波器进行M 倍内插,则输出的采样频率是输入采样频率的M 倍。
半带滤波器是一种基于抽取和内插原理的滤波器,它是一种特殊的低通FIR(有限冲激响应)数字滤波器——一种抽取因子为2的抽取滤波器,这种滤波器由于通带和阻带相对于二分之一Nyquist 频率对称,因而有近一半的滤波器系数为O 。
由于系数为0的部分在运算的过程中不需要消耗运算量,所以运算量减少了一半,使实际滤波过程中的运算量大幅度减少。
因此计算的效率高,实时性比较强,有利于滤波运算的实时实现,多速率信号处理中有着特别重要的地位,并且得到了广泛的应用。
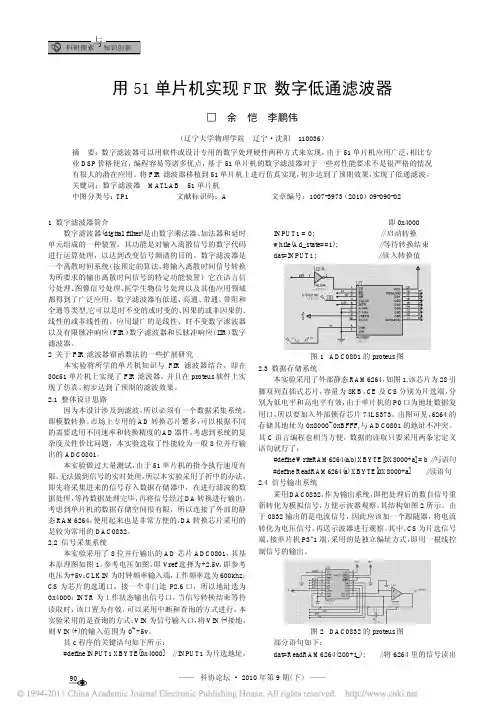
二.半带FIR 滤波器的性质及设计方法2.1半带FIR 滤波器的性质图1为抽取因子为2的半带滤波器的框图,其中:)(z H h 为抽取滤波器,s f 为输入采样2/1s s f f =为输出采样率。
图1 抽取因子为2的半带滤波器框图现在考虑频率特性如图2所示的一种特殊的FIR 滤波器,即为半带FIR 滤波器,它具有如下的特性:(1)通带纹波p δ和阻带纹波s δ相等,即s p δδ=;(2)通带边频p F 和阻带边频s F 相对于4/s f 对称,即2/s s p f F F =+,用数字频率表示为:πωω=+s p 。
f sx(n)H h (z)f s22/1s s f f =2 2.2半带滤波器的设计方法设计滤波器的过程中,根据滤波器的冲击响应)(n h 和节数N ,有以下4种类型的滤波器:(1)类型I :)(n h 偶对称,N 为偶数,4种滤波器都可以设计。
(2)类型II :)(n h 偶对称,N 为奇数,可以用来设计低通和带通滤波器,不可以用来设计高通和带阻滤波器。
(3)类型III :)(n h 奇对称,N 为偶数,只能用来设计带通滤波器,其他类型的滤波器都不可以设计。
(4)类型IV :)(n h 奇对称,N 为奇数,可以用来设计高通和带通滤波器,不可以用来设计低通和带阻滤波器。
根据图2可以看出半带FIR 滤波器是一种特殊的低通滤波器,并且其相位要求是线性的,这里采用类型II 进行设计,即:)1()(n N h n h --=式中N 为滤波器的节数,且为奇数。
对于这种N 为奇数的偶对称FIR 滤波器,其频率响应H (e jw )可以表示为: H h (e jw )=H h (ω)e -jw(N-1)/2 式中:s f f /2πω=,为相对数字频率;∑-==2/)1(0)cos()()(N n h n n a H ωω (1)由线性相位FIR 滤波器性质可知其系数首先要满足:)21()0(-=N h a )21(2)(n N h n a --= n=1,2,...,21-N其次,由半带滤波器的定义πωω=+s p ,s p σσ=和图2可以得到: )()(ωπω-+h h H H =1 (2) 将(1)式带到(2)式中得:∑-=-+2/)1(0)]cos())[cos((N n n n n n a ωπω=∑-=2/)1(0))[cos((N n n n a ω+(-1)n)]cos(n ω3=∑-2/)1()cos()(2N n n n a 为偶数项ω=1故有:5.0)21()0(=-=N h a 0]22/)1[()2(=--=n N h n a n=1,2,...,41-N 上式表明:半带滤波器除了21-=N n 点外,所有a(n)的偶次系数均为0,滤波器系数集的形式为:)(n h ={x,0,x,0,...,x,0.5,x,0,...,0,x}设计半带FIR 数字滤波器有窗函数法和频率采样法2种方法,这里采用窗函数法来设计半带FIR 滤波器。
图2给出了半带滤波器的设计参数)(p p F ω和)(s s F ω以及s p δδ=。
由图2可知:在用窗函数法设计半带滤波器时,其理想幅频特性可以表示为:H h (e jw )={可求得:⎰-=2/2/21)(πππe n h d -jaw e jwn ωd =)()(2sin a n a n -⎥⎦⎤⎢⎣⎡-ππ,其中,21-=N a 。
其次是选择窗函数,为了满足半带滤波器对p F ,s F 及s p δδ=的要求,这里利用Kaiser 窗进行设计。
2.3滤波器指标的确定(1)计算过度带:p s ωωω-=∆ (2)确定滤波器阶数N :1285.28lg 20+∆--≥ωδN , N 取奇数(3)计算凯塞窗:)())112(1()(020ββωI N nI n k ---= ,10-≤≤N n 式中:e -jaw 2πω≤πωπ≤≤24 其中,s s A δlg 20-=,为阻带最小衰减。
(4)求滤波器系数:)()()(n n h n h k d ω=, 10-≤≤N n 2.4手工计算设采样频率s F =16kHz,滚降dB a roll 60=,通带截止频率p ω=0.375π,阻带截止频率s ω=0.625π,由公式ωπ2sF f =可将截止频率的单位转换为Hz,再将其除以采样频率s F 转化为归一化频率,则: (1)通带截止频率:p f =3kHz; (2)阻带截止频率:s f =5kHz;(3)过渡带宽度:p s t B ωωω-=∆=π25.0=; (4)通带最大衰减:)11lg(20ppp a δδ-+==1dB (5)阻带最小衰减:s a =s δlg 20-=roll p a a +=61dB (6)滤波器的阶数:11=N(7)凯塞窗的控制参数β:)7.8(112.0-=s a β=5.7456三.在MATLAB 中仿真3.1滤波器的系数利用fir1函数来设计滤波器,得出的结果如下:图3 h(n)计算值3.2半带FIR 滤波器的频率特性曲线3.3基于MATLAB的幅频响应曲线图4半带FIR滤波器的幅频响应曲线5四.滤波器的结构不同对性能指标的影响在MATLAB中可以利用FDATOOL工具箱构建不同类型的数字滤波器。
设单位脉冲响应的长度为N,由之前算出的h(n)可得出系统函数为:∑+ =-=1) ()(Nnnz nhzH=0.00121-z+0.00002-z-0.03793-z+0.00004-z+0.28665-z+0.50026-z+0.28667-z+0.00008-z-0.03799-z+0.000010-z+0.001211-z4.1利用直接型结构构建滤波器FIR网络结构特点是没有反馈支路,即没有环路,其单位脉冲响应是有限长的。
选择filter structure选项框中Direct-Form I选项,点击窗口下方的Import Filter 按钮,构建直接型的半带FIR低通滤波器,结果如图所示:图5 直接型结构的滤波器幅频响应由图可以得滤波器技术指标(sp ff,单位为kHz p a,s a单位为dB),如表1所示:6性能指标初始设计指标仿真后设计参数∆相对误差f3 3.5156 0.5156 17.18%p5 5.0625 0.0625 1.25%fs1 1.0635 0.0635 6.35%apa61 62.814 1.814 2.97%s表1 直接型结构滤波器对性能指标的影响由图6和表1可以看出,滤波器幅频曲线在通带和阻带内波动幅度不太均匀,p f比初始设计高了0.5156,而s f却比初始设计值高了0.0625,通带最大衰减p a比初始设计高了0.0635dB,阻带最小衰减s a比初始设计高了1.814dB。
4.2利用级联型结构构建数字滤波器选择Edit下拉菜单中Convert to Second-order Sections选项,将构建好的Direct-Form I结构的半带FIR低通滤波器转换为级联滤波器,结果如图所示:图6 级联型结构的滤波器幅频响应图由图可以得级联型结构的滤波器技术指标(sf,单位kHz p a,s a单位为dB)如表2所示:p f性能指标初始设计指标仿真后设计参数∆相对误差3 3.4843 0.4843 16.14%fp5 4.9843 -0.0157 0.31%fs1 0.9134 -0.0686 6.86%ap61 61.7729 0.7729 1.27%as7由图6和表2中可以看出,滤波器幅频曲线在通带和阻带内波动比直接型结构滤波器幅频曲线误差小,通带最大衰减p a比初始值低了0.0686dB,阻带最小衰减s a比初始值高了0.07729dB,p f比初始值高了0.4843,s f比初始设计值低了0.0157。
五.参数字长对性能指标的影响在实际的数字滤波器的设计中,由于计算机或DSP芯片等的字长和存储空间有限,所以也只能对设计参数取有限的字长进行设计,然而,如果字长太短,设计的滤波器误差就会太大,造成滤波效果不佳。
下面研究不同参数字长对性能指标的影响。
将计算获得的半带FIR低通滤波器的系数输入FDATOOL 中的filter coefficients 工具中,点击Import Filter按钮,生成数字滤波器,运用Set quantization parameters 按钮,在filter arithmetic下拉菜单下选择Fixed Point选项,通过改变coefficient word length的值可以改变构建滤波器的参数字长,图中虚线为供参考的理想字长下生成的滤波器的幅频响应曲线,实现为改变参数字长后的滤波器幅频响应曲线。