机构简图(参考)
- 格式:ppt
- 大小:3.58 MB
- 文档页数:59
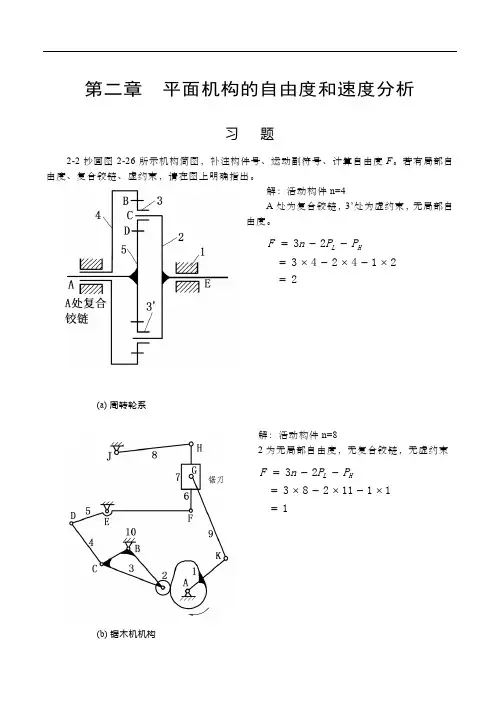
第二章 平面机构的自由度和速度分析习 题2-2抄画图2-26所示机构简图,补注构件号、运动副符号、计算自由度F 。
若有局部自由度、复合铰链、虚约束,请在图上明确指出。
解:活动构件n=4A 处为复合铰链,3’处为虚约束,无局部自由度。
2214243 23=⨯-⨯-⨯=--=HL P P n F(a) 周转轮系解:活动构件n=82为无局部自由度,无复合铰链,无虚约束11111283 23=⨯-⨯-⨯=--=HL P P n F(b) 锯木机机构解:活动构件n=6D 处为复合铰链,有3个转动副,无虚约束,无局部自由度。
1317263 23=⨯-⨯-⨯=--=HL P P n F(c) 连杆齿轮组合机构解:活动构件n=9无复合铰链,无虚约束,无局部自由度。
10113293 23=⨯-⨯-⨯=--=HL P P n F(d) 多杆机构解:活动构件n=7A 、B 、C 、D 处为复合铰链,四处的转动副数均为2,无虚约束,无局部自由度。
2318273 23=⨯-⨯-⨯=--=HL P P n F(e) 连杆齿轮组合机构解:活动构件n=7滚子5和9处存在局部自由度,同时D’处为虚约束,无复合铰链。
1219273 23=⨯-⨯-⨯=--=HL P P n F(f) 凸轮连杆机构图2-26 几种机构运动简图2-3画出图2-27所示机构的运动简图并计算自由度F 。
试找出原动件,并标以箭头。
解:活动构件n=3无复合铰链,无局部自由度,无虚约束。
1014233 23=⨯-⨯-⨯=--=HL P P n F图2-27(a )解:活动构件n=4无复合铰链,无局部自由度,无虚约束。
1115243 23=⨯-⨯-⨯=--=HL P P n F图2-27(b )解:活动构件n=3无复合铰链,无局部自由度,无虚约束。
1014233 23=⨯-⨯-⨯=--=HL P P n F图2-27(c )图2-27 几种机构运动简图2-4试绘制图2-28所示机构的运动简图,并计算其机构的自由度F 。
机械原理参考资料(仅供参考)第一章(绪论)1 机构:指一种用来传递与变换运动和力的可动装置。
2 机器:指一种可用来变换和传递能量、物料与信息的机构的组合。
第二章1. 零件:机器中的一个独立制造单元体;2 构件:机器中每一个独立的运动单元体。
构件是组成机构的基本要素之一。
3 运动副:是两构件直接接触而构成的可动联接。
高副:凡两构件通过单一点或线接触而构成的运动副,(凸副,齿轮副)一个约束:低副:通过面接触而构成的运动副。
(移动副,转动副)两个约束。
空间两构件构成的运动副,其自由度f 和约束数s 满足f+s=6。
4 机构运动简图根据机构的运动尺寸,按一定的比例尺定出各运动副的位置,采用运动副及常用机构运动简图符号和构件的表示方法,将机构运动传递情况表示出来的简化图形。
绘制方法及步骤:(1)搞清机械的构造及运动情况,沿着运动传递路线,查明组成机构的构件数目、运动副的类别及其位置;(2)选定视图平面;(3)选适当比例尺,作出各运动副的相对位置,再画出各运动副和机构的符号,最后用简单线条连接,即得机构运动简图。
5 机构的自由度机构具有确定运动时所必须给定的独立运动参数的数目,其数目用F表示。
6 机构具有确定运动的条件(1)机构的原动件数目应等于机构的自由度数目。
(2)如果原动件数<F, 则机构的运动将不完全确定;(3)如果原动件数>F, 则会导致机构最薄弱环节的损坏。
7 机构自由度的计算(平面机构)每个低副引入两个约束,使构件失去两个自由度;每个高副引入一个约束,使构件失去一个自由度。
计算公式:F=3n-2PL-Ph机构自由度F 取决于活动构件的件数与运动副的性质(高副或低副)和个数。
(1)复合铰链:两个以上构件在同一处用转动副相连接,该处则构成复合铰链。
复合铰链处的运动副数目为:K-1(K为构成复合铰链的构件数目)。
(2)局部自由度:某些构件所产生的局部运动并不影响其他构件的运动。
(一般处理方法为焊死)(3虚约束机构中某些运动副带入的对机构运动起重复约束作的约束,以p′表示。
院-系:工学院机械系专业:机械工程及自动化年级: 2011级学生姓名:张万兵学号: 201101030209指导教师:王海生2013年8月目录一.设计题目 (1)1.1课程设计目的和任务 (1)1.2课程设计内容与基本要求 (2)1.3机构简介 .................................................. 错误!未定义书签。
1.4参考数据 (5)1.5设计要求 (5)二. 设计方案比较 (6)2.1设计方案一 (6)2.2设计方案二 (7)2.3设计方案三 (8)2.4最终设计方案 .......................................... 错误!未定义书签。
三.虚拟样机实体建模与仿真 ......................... 错误!未定义书签。
3.1ADAMS/V IEW 的样机建模 .................. 错误!未定义书签。
四.虚拟样机仿真结果分析 (10)4.1滑块水平位移仿真曲线 (10)4.2块水平运动速度仿真曲线 (10)4.3滑块水平运动加速度仿真曲线 (11)4.4带刮片摆杆角速度仿真曲线 (11)4.5带刮片白杆角速度仿真曲线 (11)五. 课程设计总结 (12)5.1机械原理课程设计总结 (12)5.2设计过程 (13)5.3设计展望 (14)5.4设计工作分工表 (15)5.5参考文献 (15)一.题目:汽车风扇刮水器1.1课程设计目的和任务机械原理课程设计能够培养机械类专业学生创新能力,是学生综合运用机械原理课程所学理论知识和技能解决实际问题,获得工程技术训练的必不可少的实践性教学环节。
机械原理课程设计教学所要达到的目的是:1、培养学生理论联系实际的设计思想,训练学生综合运用机械原理课程的理论知识,并结合生产实际来分析和解决工程问题的能力。
2、通过制定设计方案、合理选择机构的类型、正确地对机构的运动和受力进行分析和计算,让学生对机构设计有一个较完整的概念。
第二章2-1 何谓构件?何谓运动副及运动副元素?运动副是如何进行分类的?答:参考教材5~7页。
2-2 机构运动简图有何用处?它能表示出原机构哪些方面的特征?答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,也可用来进行动力分析。
2-3 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况?答:参考教材12~13页。
2-5 在计算平面机构的自由度时,应注意哪些事项?答:参考教材15~17页。
2-6 在图2-22所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗?为什么?答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。
2-7 何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基本杆组的级别及机构的级别? 答:参考教材18~19页。
2-8 为何要对平面高副机构进行“高副低代"?“高副低代”应满足的条件是什么?答:参考教材20~21页。
2-11 如图所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴 A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头上下运动以达到冲压目的。
试绘出其机构运动简图,分析其是否能实现设计意图?并提出修改方案。
解:1)取比例尺绘制机构运动简图。
2)分析其是否可实现设计意图。
F=3n-( 2P l +P h –p’ )-F’=3×3-(2×4+1-0)-0=0此简易冲床不能运动,无法实现设计意图。
3)修改方案。
为了使此机构运动,应增加一个自由度。
办法是:增加一个活动构件,一个低副。
修改方案很多,现提供两种。
※2-13图示为一新型偏心轮滑阎式真空泵。
其偏心轮1绕固定轴心A转动,与外环2固连在一起的滑阀3在可绕固定轴心C转动的圆柱4中滑动。
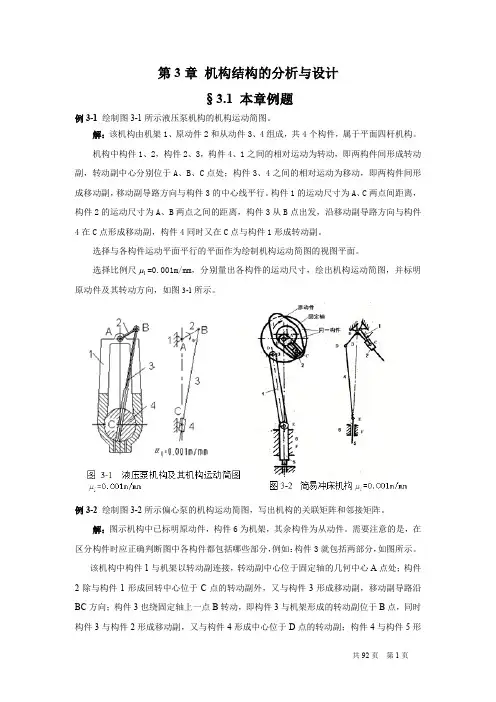
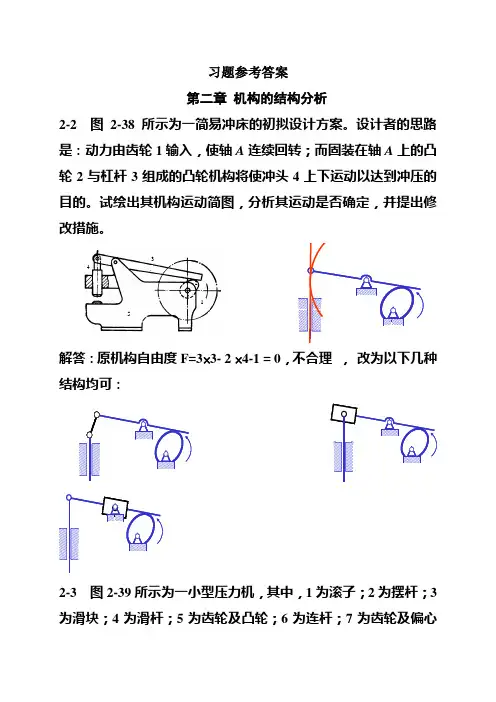
习题参考答案第二章机构的结构分析2-2 图2-38所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图,分析其运动是否确定,并提出修改措施。
4351 2解答:原机构自由度F=3⨯3- 2 ⨯4-1 = 0,结构均可:1为滚子;2为摆杆;3为滑块;4为滑杆;5为齿轮及凸轮;6为连杆;7为齿轮及偏心轮;8为机架;9为压头。
试绘制其机构运动简图,并计算其自由度。
O齿轮及偏心轮ωA齿轮及凸轮BEFDC压头机架连杆滑杆滑块摆杆滚子解答:n=7; P l =9; P h =2,F=3⨯7-2 ⨯9-2 = 12-6 试计算图2-42所示凸轮—连杆组合机构的自由度。
解答:a) n=7; P l =9; P h =2,F=3⨯7-2 ⨯9-2 =1 L 处存在局部自由度,D 处存在虚约束b) n=5; P l =6; P h =2,F=3⨯5-2 ⨯6-2 =1 E 、B 处存在局部自由度,F 、C 处存在虚约束b)a)A EMDFELKJIFBCCDBA2-7 试计算图2-43所示齿轮—连杆组合机构的自由度。
BDCA(a)CDBA(b)解答:a) n=4; P l =5; P h =1,F=3⨯4-2 ⨯5-1=1 A 处存在复合铰链b) n=6; P l =7; P h =3,F=3⨯6-2 ⨯7-3=1 B 、C 、D 处存在复合铰链2-8 试计算图2-44所示刹车机构的自由度。
并就刹车过程说明此机构自由度的变化情况。
解答:① 当未刹车时,F=3⨯6-2 ⨯8=2② 在刹车瞬时,F=3⨯5-2⨯7=1,此时构件EFG 和车轮接触成为一体,位置保持不变,可看作为机架。
③ 完全刹死以后,F=3⨯4-2⨯6=0,此时构件EFG 、HIJ 和车轮接触成为一体,位置保持不变,可看作为机架。
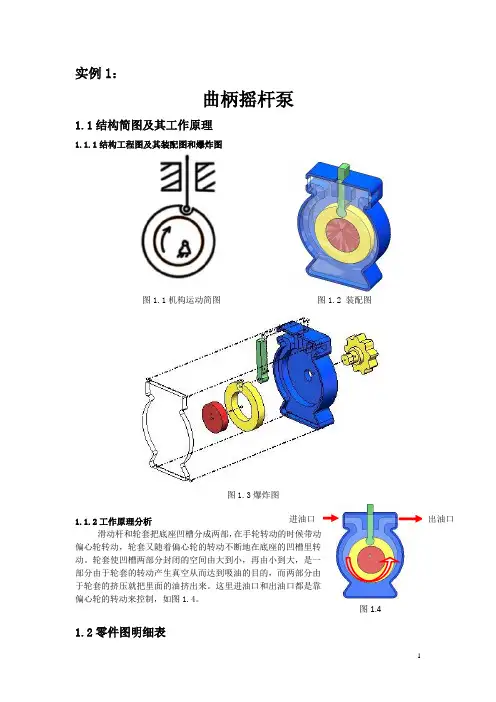
图1.4实例1:曲柄摇杆泵1.1结构简图及其工作原理1.1.1结构工程图及其装配图和爆炸图图1.1机构运动简图 图1.2 装配图图1.3爆炸图1.1.2工作原理分析滑动杆和轮套把底座凹槽分成两部,在手轮转动的时候带动偏心轮转动,轮套又随着偏心轮的转动不断地在底座的凹槽里转动。
轮套使凹槽两部分封闭的空间由大到小,再由小到大,是一部分由于轮套的转动产生真空从而达到吸油的目的,而两部分由偏心轮的转动来控制,如图1.4。
1.2零件图明细表进油口 出油口1.2.1零件图序号名称渲染效果图电子文档名称备注1 底座底座.SLDPRT2 滑动杆滑动杆.SLDPRT3 偏心轮偏心轮.SLDPRT4 轮套轮套.SLDPRT5 手轮手轮.SLDPRT6 玻璃盖玻璃盖.SLDPRT1.3刀具路径1.3.1底座步骤加工对象加工方法使用刀具下刀速率提刀速率主轴转速进给率1 不规则平面曲面粗加工挖槽加工3mm平底刀(刃长10mm)200 400 2000 5002 圆形通孔外形铣削3mm平底刀(刃长10mm)200 400 2000 5003 外形轮廓外形铣削3mm平底刀(刃长10mm)200 400 2000 5004 外形毛头外形铣削3mm平底刀200 400 2000 3001、平面加工由于要铣的平面外形并不是规则的,且深度分为3层,因此应使用“曲面粗加工挖槽加工”,具体步骤如下:(1)打开“底座”文件模型,按F9显示坐标原点,并把零件底面中心的原点移动到与Mastercam的坐标原点重合。
如图1.5所示:图1.5 图1.6(2)选择刀具路径:单击“机床类型”,选择在“铣床”菜单下选择“默认”。
再单击“刀具路径”选项卡,选择“曲面粗加工”中的“粗加工挖槽加工”。
如图1.6所示。
(3)选择边界范围:加工对象:框选整个模型。
然后单击选择边界,如图 1.7。
选取2D串联,所选边界为模型底面外形边界,图1.8所示。
然后单击确定。
目录第一部分:六杆机构运动与动力分析一.机构分析分析类题目 3 1分析题目 32.分析内容 3 二.分析过程 4 1机构的结构分析 42.平面连杆机构运动分析和动态静力分析 53机构的运动分析8 4机构的动态静力分析18 三.参考文献21第二部分:齿轮传动设计一、设计题目22二、全部原始数据22三、设计方法及原理221传动的类型及选择22 2变位因数的选择22四、设计及计算过程241.选取两轮齿数242传动比要求24 3变位因数选择244.计算几何尺寸25 五.齿轮参数列表26 六.计算结果分析说明28 七.参考文献28第三部分:体会心得29一.机构分析类题目3(方案三)1.分析题目对如图1所示六杆机构进行运动与动力分析。
各构件长度、构件3、4绕质心的转动惯量如表1所示,构件1的转动惯量忽略不计。
构件1、3、4、5的质量G1、G3、G4、G5,作用在构件5上的阻力P工作、P空程,不均匀系数δ的已知数值如表2所示。
构件3、4的质心位置在杆长中点处。
2.分析内容(1)对机构进行结构分析;(2)绘制滑块F的运动线图(即位移、速度和加速度线图);(3)绘制构件3角速度和角加速度线图(即角位移、角速度和角加速度线图);(4)各运动副中的反力;(5)加在原动件1上的平衡力矩;(6)确定安装在轴A上的飞轮转动惯量。
图1 六杆机构方案号L DF(mm)L CE(mm)L CD(mm)L AB(mm)L AC(mm)n1r/minJ S3kg.m2J S4kg.m23 510 575 170 140 375 80 0.22 0.16方案号G1(kg)G3(kg)G4(kg)G5(kg)P工作(N)P空程(N)δ3 14 75 55 80 1400 140 1/40二.分析过程:通过CAD制图软件制作的六杆机构运动简图:图2 六杆机构CAD所做的图是严格按照题所给数据进行绘制的。
并机构运动简图中活动构件的序号从1开始标注,机架的构件序号为0。
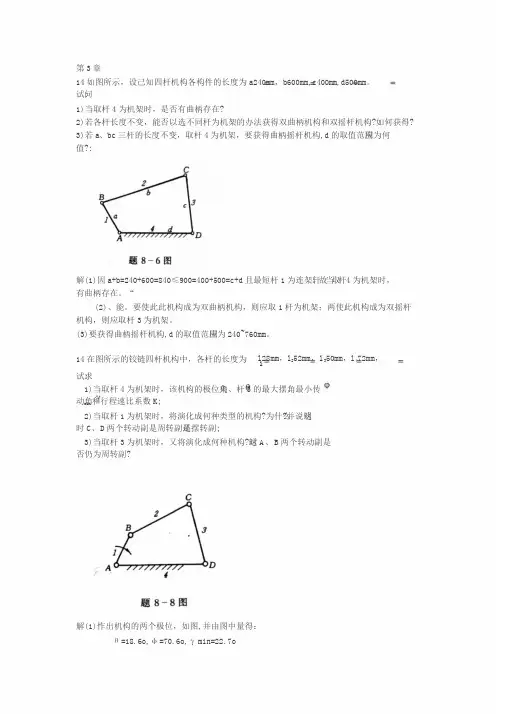
第3章14如图所示,设己知四杆机构各构件的长度为a240mm,b600mm,c400mm,d500mm。
:试问1)当取杆4为机架时,是否有曲柄存在?2)若各杆长度不变,能否以选不同杆为机架的办法获得双曲柄机构和双摇杆机构?如何获得?c三杆的长度不变,取杆4为机架,要获得曲柄摇杆机构,d的取值范围应为何3)若a、b﹑值?:解(1)因a+b=240+600=840≤900=400+500=c+d且最短杆1为连架轩.故当取杆4为机架时,有曲柄存在。
“(2)、能。
要使此此机构成为双曲柄机构,则应取1杆为机架;两使此机构成为双摇杆机构,则应取杆3为机架。
(3)要获得曲柄摇杆机构,d的取值范围应为240~760mm。
14在图所示的铰链四杆机构中,各杆的长度为l28mm,l252mm,l350mm,l472mm,1试求:、最小传1)当取杆4为机架时,该机构的极位夹角、杆3的最大摆角动角m in和行程速比系数K;2)当取杆1为机架时,将演化成何种类型的机构?为什么?并说明这是摆转副;时C、D两个转动副是周转副还时A、B两个转动副是3)当取杆3为机架时,又将演化成何种机构?这否仍为周转副?解(1)怍出机构的两个极位,如图,并由图中量得:θ=18.6o,φ=70.6o,γmin=22.7ok 18018018.612.3 18018018.6(2)①由28+72≤52+50可知图示铰链四杆机构各杆长度符合杆长条件;小②最短杆l为机架时,该机构将演化成双曲柄机构;③最短杆1参与构成的转动副A、B都是周转副而C、D为摆转副;(3)当取杆3为机架时,最短杆变为连杆,又将演化成双摇杆机构,此时A、B仍为周转副。
31设计一曲柄滑块机构,设已知滑块的行程速度变化系数K=1.5,滑块的冲程H=50mm,偏距e=20mm。
并求其最大压力角αmax。
解:计算18011801.5136kk11.51并取相应比例尺μl根据滑块的行程H作出极位及作θ圆,作偏距线,两者的交点即铰链所在的位置,由图可得:l AB=μl.(AC2-AC1)/2=17mm,l BC=μl.(AC2+AC1)/2=36mm16试求图示各机构在图示位置时全部瞬心的位置(用符号P,,直接标注在图上)(a)参考答案:(b)参考答案:参考答案:参考答案:(e)参考答案:17.在图示的四杆机构中,L AB=60mm,L CD=90mm,L AD=L BC=120mm,ω2=10rad/s,试用瞬心法求:1)当φ=165°时,点的速度vc;2)当φ=165°时,构件3的BC线上速度最小的一点E的位置及速度的大小;3)当V C=0时,φ角之值(有两个解)。
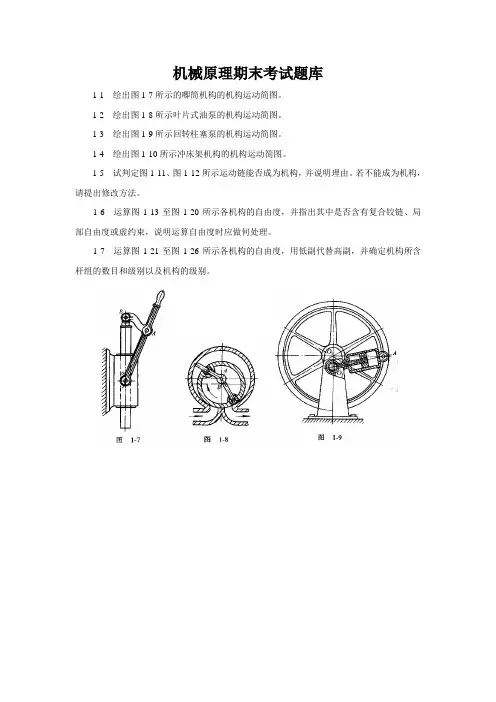
机械原理期末考试题库1-1 绘出图1-7所示的唧筒机构的机构运动简图。
1-2 绘出图1-8所示叶片式油泵的机构运动简图。
1-3 绘出图1-9所示回转柱塞泵的机构运动简图。
1-4 绘出图1-10所示冲床架机构的机构运动简图。
1-5 试判定图1-11、图1-12所示运动链能否成为机构,并说明理由。
若不能成为机构,请提出修改方法。
1-6 运算图1-13至图1-20所示各机构的自由度,并指出其中是否含有复合铰链、局部自由度或虚约束,说明运算自由度时应做何处理。
1-7 运算图1-21至图1-26所示各机构的自由度,用低副代替高副,并确定机构所含杆组的数目和级别以及机构的级别。
第1章综合测试题1-1 填空题及简答题(1)平面机构中若引入一个高副将带入个约束,而引入一个低副将带入人约束。
(2)高副低代必须满足的条件是,。
(3)何谓运动链?运动链具备什么条件才具有运动的可能性?具备什么条件才具有运动的确定性?运动链具备什么条件才能成为机构?(4)何谓机构运动简图?绘制的步骤如何?(5)机构具有确定运动的条件是什么?(6)在运算平面机构自由度时应注意哪些事项?(7)杆给具有什么特点?如何确定杆组的级别?(8)假如确定机构的级别?选择不同原动件对机构的级别有无阻碍?1-2 画出图1-27所示油泵的机构运动简图,并运算其自由度。
1-3 判别图1-28、图1-29所示运动链能否成为机构,并说明理由。
假如有复合铰链、局部自由度或虚约束,需一一指出。
1-4 试用低副代替图1-30所示机构中的高副,并说明高副低代的一样方法。
1-5 图1-31所示为一机构的初拟设计方案,试从机构自由度的概念分析其设计是否会理,并提出修改措施。
又问,在此初似设计方案中,是否存在复合铰链、局部自由度和虚约束?1-6 运算图1-32所示机构的自由度,并在高副低代后,确定机构所含杆组的数目和级别并判定机构的级别。
第1章习题参考答案1-5 F=0,机构不能运动F=0,机构不能运动1-6 F=1F=1F=1F=2F=1F=1F=1F=11-7 F=1,Ⅱ级机构F=1,Ⅱ级机构F=1,Ⅱ级机构F=1,Ⅲ级机构,一个Ⅱ级杆组,一个Ⅱ级杆组F=1,Ⅱ级机构F=1,Ⅲ级机构第1章综合测试题参考答案1-2 F=11-3 F=0,不能成为机构;F=1,能成为机构,F(G)为虚约束1-5 E为虚约束,B为局部自由度1-6 F=1,一个Ⅲ级杆组,一个Ⅰ级杆组,Ⅲ级机构。
一、机构结构分析的内容及目的(1) 研究机构的组成及机构具有确定运动的条件。
目的是弄清机构包含哪几个部分,各部分如何相联?以及怎样的结构才能保证具有确定的相对运动?这对于设计新的机构显得尤其重要。
(2) 研究机构运动简图的绘制方法。
如何用简单的图形表示机构的结构和运动状况,目的是为机构的运动分析和动力分析作准备。
一、机构结构分析的内容及目的(3) 研究机构的组成原理并按结构特点对机构进行分类。
把各种机构按结构加以分类,其目的是搞清楚按何种规律组成的机构能满足运动确定性的要求,并按其分类建立运动分析和动力分析的一般方法。
机构有简有繁,构件有多有少,不同的机构都有各自的特点,而运动确定是它们的共同特征。
名词术语:构件−独立运动的最小单元体组成机构的基本要素,本课程研究的基本单元单一零件或多个零件刚性联接而成的一个独立运动单元零件−加工制造的最小单元体运动副运动副元素a)两个构件、b) 直接接触、c) 有相对运动 − 两个构件之间接触式的可动联接 三个条件,缺一不可 − 两构件直接接触的点、线、面 部分 名词术语:运动副作用是限制构件间的相对运动,使相对运动自由度的数目减少,这种限制作用称为约束运动副分类 (2)按相对运动的范围分−平面运动副、空间运动副凡是以面接触的运动副称为低副,而以点或线相接触的运动副称为高副(3)按运动副引入的约束数分 (4)按运动副接触部分的几何形状分如果运动副元素间只能相互作平面平行运动,则称之为平面运动副,否则称为空间运动副将引入一个约束数的运动副称为I 级副,引入两个约束数的运动副称为Ⅱ级副,依此类推点接触高副 线接触高副 球面副 球销副 圆柱副 螺旋副 平面高副 转动副 移动副 等2-1I 级副、II 级副、III 级副、IV 级副、V 级副机构的结构分析 2-1-1 二 机构的组成 (1)按运动副的接触方式分 − 高副、低副运动副是约束运动的,故一个运动副至少引入一个约束,也至少保留一个自由度常见运动副符号的表示:国标GB4460-84 (表2-1)2-2一般构件的表示方法杆、轴构件固定构件同一构件一般构件的表示方法两副构件三副构件一般构件的表示方法注意事项:画构件时,构件上与运动无关的因素(复杂形状等)应略去,只考虑与运动有关的因素。
提示:
1.在画简图之前大家先观察各机构动图,研究其运动特点,进行运动分析:(1)找出原动件(动力来源)(2)数出运动构件数目(3)找出运动传递路线(4)找出执行构件运动(5)找出高副和低副(移动副和转动副)。
2.机构运动简图只需画出抽象的线条和符号,不必具体画出机构的真实外形。
简图包括原动件(带箭头构件)、运动构件(图中用数目标出)、运动副(高副、低副)、固定机架(阴影线),有比例要求;机构运动示意图就没有比例要求了。
报告上画图两者选一即可。
3.绝大多数机构的原动件只有1个,每个机构都有低副,但不一定有高副。
机构运动简图参考:
1.牛头刨床机构
或
2.曲柄滑块机构
3.抽水唧筒机构
4.
5.正弦机构或偏心轮机构(自己思考)。
毕业设计32/5t桥式起重机小车及大车运行机构设计毕业设计任务书32/5t桥式起重机小车及大车机构设计32/5t桥式起重机小车及大车机构设计摘要桥式起重机是一种工作效率较高,性能稳定的常用起重机。
桥式起重机的使用提高了工厂,矿山等工作环境的机械化程度。
本次设计结合生产实践并参阅了众多的相关书籍,介绍了32/5t标准桥式起重机的主要结构组成以及在生产中是如何进行工作的;论述了国内外桥式起重机的最新动态和研发成果。
按照现有的设计理论进行了方案设计。
主要做了桥式起重机中的提升机构、小车行走机构和大车行走机构等方面的设计计算和校核。
大体内容包含起升机构和行走机构的传动方案,零部件的空间位置分布,起升机构中卷筒,钢丝绳,滑轮组和吊钩组的设计以及运行机构中车轮和运行轨道的设计。
选择并校核了如联轴器、减速器、电动机、传动轴等重要零部件的工作性能。
关键词桥式起重机起升机构大车运行机构小车运行机构32/5t bridge crane lifting and travelling mechanismdesignAbstractBridge crane is a kind of common cranes which have high efficiency and stable performance. The use of bridge crane improved the degree of mechanization in factories, mines and other work environments. The design introduced 32/5t standard bridge cranes and the main structural component and their way to work in the production; discusses the latest developments at home and abroad of bridge crane and R & D results by combined production practice and refer to a large number of books. Make the program design in accordance with the existing design theory. Mainly carried out the design and calculations of the hoisting mechanism, crane trolley and travelling mechanism’s operating mechanism in the bridge crane . Generally contains the transmission scheme of hoisting mechanism and operating mechanism, the distribution of position of the parts ,the drum of lifting mechanism, wire rope, pulley and hook block design and the design of the wheels and running track in the working mechanism. Selected and checked the parts like coupling, reducer, motor, drive shafts and other important parts of the job performance.Keywords Bridge crane hoisting mechanism crane traveling mechanism cart mechanism目录摘要Abstract1 前言 (1)1.1 概述 (1)1.2 起重机械的工作特点 (1)1.3 国外桥式起重机发展动向 (1)1.4 国内桥式起重机发展动向 (2)2 起升机构设计 (3)2.1 主要工作参数 (3)2.2 主起升机构的计算 (3)2.2.1 确定起升机构的传动方案 (3)2.2.2 钢丝绳的选择 (4)2.2.3 滑轮的计算和选择 (6)2.2.4 卷筒的计算选择及强度验算 (6)2.2.5 电动机的选择 (8)2.2.6 电动机的发热和过载校验 (9)2.2.7 减速器的选择 (9)2.2.8 实际起升速度及所需功率计算 (9)2.2.9 校验减速器输出轴强度 (10)2.2.10 制动器的选择 (10)2.2.11 联轴器的选择 (11)2.2.12 验算启动时间 (12)2.2.13 验算制动时间 (12)2.2.14 高速浮动轴计算 (12)3 小车运行机构设计 (14)3.1 机构传动方案设计 (14)3.1.1 选择车轮与轨道并验算强度 (14)3.1.2 计算运行阻力 (15)3.1.3 计算选择电动机 (16)3.1.4 计算选择减速器 (16)3.1.5 验算运行机构速度和实际功率 (17)3.1.6 验算启动时间 (17)3.1.7 按启动工况校核减速器功率 (18)3.1.8 选择制动器 (18)3.1.9 选择联轴器 (19)3.1.10 验算低速浮动轴强度 (19)4 大车运行机构计算 (21)4.1 机构传动方案设计 (21)4.2 车轮与轨道的选择及校验 (21)4.3 运行阻力的计算 (23)4.4 电动机的选择 (23)4.5 减速器的选择 (24)4.6 验算运行速度和实际所需功率 (24)4.7 验算启动时间 (24)4.8 启动工况下校核减速器功率 (25)4.9 验算启动不打滑条件 (26)4.10 选择制动器 (27)4.11 选择联轴器 (28)4.12 浮动轴强度的验算 (28)4.13 缓冲器选择 (29)结论 (31)参考文献 (32)致谢 (33)1 前言1.1 概述桥式起重机是在架设好的桥架上沿轨道运行的一种起重机,又称天车。