南京理工大学机械设计基础(上)答案 (10)
- 格式:doc
- 大小:238.50 KB
- 文档页数:2
第11章 蜗杆传动11.1 蜗杆传动的特点及使用条件是什么?答:蜗杆传动的特点是:结构紧凑,传动比大。
一般在传递动力时,10~80i =;分度传动时只传递运动,i 可达1 000;传动平稳,无噪声;传动效率低;蜗轮一般用青铜制造,造价高;蜗杆传动可实现自锁。
使用条件:蜗杆传动用于空间交错(90)轴的传动。
用于传动比大,要求结构紧凑的传动,传递功率一般小于50kW 。
11.2 蜗杆传动的传动比如何计算?能否用分度圆直径之比表示传动比?为什么?答:蜗杆传动的传动比可用齿数的反比来计算,即1221i n n z z ==;不能用分度圆直径之比表示传动比,因为蜗杆的分度圆直径11d mq mz =≠。
11.3 与齿轮传动相比较,蜗杆传动的失效形式有何特点?为什么?答:蜗杆传动的失效形式与齿轮传动类似,有点蚀、弯曲折断、磨损及胶合。
但蜗杆传动中蜗轮轮齿的胶合、磨损要比齿轮传动严重得多。
这是因为蜗杆传动啮合齿面间的相对滑动速度大,发热严重,润滑油易变稀。
当散热不良时,闭式传动易发生胶合。
在开式传动及润滑油不清洁的闭式传动中,轮齿磨损较快。
11.4 何谓蜗杆传动的中间平面?中间平面上的参数在蜗杆传动中有何重要意义? 答:蜗杆传动的中间平面是通过蜗杆轴线且垂直于蜗轮轴线的平面。
中间平面上的参数是标准值,蜗杆传动的几何尺寸计算是在中间平面计算的。
在设计、制造中,皆以中间平面上的参数和尺寸为基准。
11.5 试述蜗杆直径系数的意义,为何要引入蜗杆直径系数q ?答:蜗杆直径系数的意义是:蜗杆的分度圆直径与模数的比值,即1q d m =。
引入蜗杆直径系数是为了减少滚刀的数量并有利于标准化。
对每个模数的蜗杆分度圆直径作了限制,规定了1~4个标准值,则蜗杆直径系数也就对应地有1~4个标准值。
11.6 何谓蜗杆传动的相对滑动速度?它对蜗杆传动有何影响?答:蜗杆传动的相对滑动速度是由于轴交角90∑=,蜗杆与蜗轮啮合传动时,在轮齿节点处,蜗杆的圆周速度1v 和蜗轮的圆周速度2v 也成90夹角,所以蜗杆与蜗轮啮合传动时,齿廓间沿蜗杆齿面螺旋线方向有较大的相对滑动速度s v ,其大小为s 1cos v v λ==。
![南京理工大学机械设计基础(上)答案_(8)[1]](https://uimg.taocdn.com/dc5496bafd0a79563c1e729d.webp)
《机械设计基础》作业答案第一章平面机构的自由度和速度分析1 —1自由度为:F =3n _(2P L +P H _P') _F' =3 7 -(2 9 1-0) -1二21-19 -1=1或:F =3n -2P L -P H=3 6 -2 8 -1-11-6自由度为F =3n _(2P L P H _P') _F' =3 9-(2 12 1 -0) -1 =1或:F =3n -2P L - F H=3 8-2 11-1=24-22 -1=11 —10自由度为:F =3n _(2P L +P H _P') _F' =3 10-(2 14 12 -2) -1 = 30 -28 -1=1或:F =3n-2P L - P H=3 9-2 12-1 2=27-24 -2=11 — 11F =3n -2P L -P H=3 4 -2 4 -2=21 — 13:求出题1-13图导杆机构的全部瞬心和构件R4 p 3 P34 R3 1、3的角速度比。
1 - 14:求出题1-14图正切机构的全部瞬心。
设 •= =10rad/s ,求构件3的速度v 3 。
v 3 =v P13 =叫 P 14P 3 =10^200 = 2000mm/s1- 15:题1-15图所示为摩擦行星传动机构,设行星轮2与构件1、4保持纯滚动接触,试用瞬心法求轮1与轮2的角速度比「1/「2。
构件1、2的瞬心为P 12P 24、P 14分别为构件2与构件1相对于机架的绝对瞬心⑷ 1 沃 P 14p 2 =切2 “ !~24 P 12 4-13 P3PP1 3创|P 24p 2| 2r 2 ⑷ 2 IR 4P 12I r i=10 AC tan BCA 916.565mm/s :2.9rad / s转中心的距离l AC =15mm , I AB = 90mm ,^10rad /s ,求『-00和『-1800时,从动件角速度-'2的数值和方向。
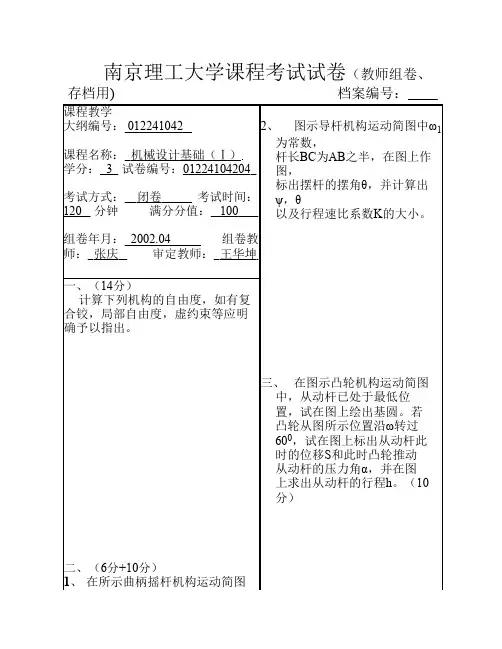
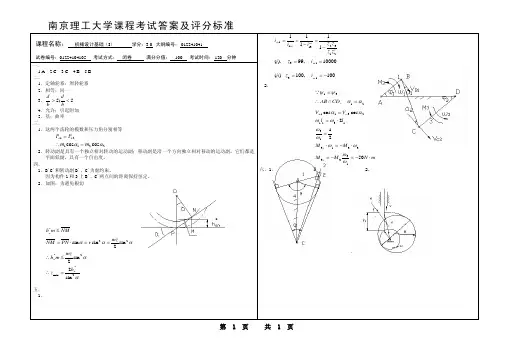
南京理工大学课程考试试卷(教师组卷、存档用) 档案编号:中,摇杆为驱动构件。
试在图上绘出处于死点位置的机构运动简图。
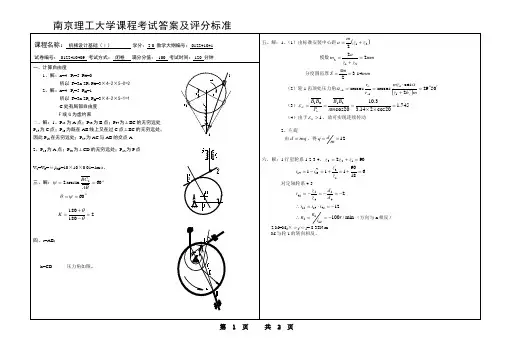
四、(16分+6分)1、一对标准渐开线圆柱直齿轮外啮合传动(正常齿),正确安装(齿侧间隙为零)后,中心距为144mm,其齿数为z1=24,z2=120,分度圆上压力角α=2001 求齿轮2的模数m2及其在分度圆上的齿厚S2;2 求轮1的齿顶圆处的压力角αa1;3 如已求得它们的实际啮合线长度B1B2=10.3mm,试计算该对齿轮传动的重合度;4 说明该对齿轮能否实现连续传动。
2、蜗轮蜗杆的相对转向关系如图所示。
试指出蜗杆及蜗轮的螺旋线旋向。
若蜗杆的分度圆直径为36mm,七、(8分)梯形滑块1在V形槽2上沿垂直纸面方向相对滑动,α1=65°,α2=25°,1与2间的而蜗轮的端面模数为3mm,试求蜗杆的直径系数q 。
五、(18分)图示轮系中,各轮均为正确安装的标准渐开线圆柱直齿轮。
已知轮1的齿数z1=18,轮2的齿数z2=36,而轮5的分度圆半径为轮4的两倍。
轮1的转速大小为1200r/min ,转向如图所示。
1 、求从轮1到轮5的传动比i15及轮5的转速大小与转向。
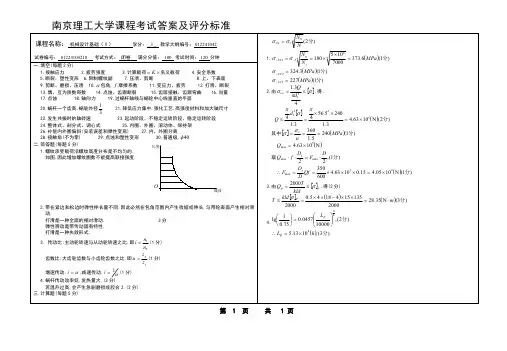
2 、若5齿轮上加阻力矩,其值为100N.m,现以1齿轮为等效构件,那么其对应的等效力矩M的值多大,方向与齿轮1的转向成何关系?摩擦系数f=0.12。
试推导当量摩擦系数fΔ的计算公式,并计算其值。
六、图示凸轮机构运动简图中,长度比例尺为μl=0.002m/mm,凸轮的角速度ω1=10rad/s。
试求构件1与2的速度,瞬心P12,并用它求解杆2速度的大小与方向。
(12分)。
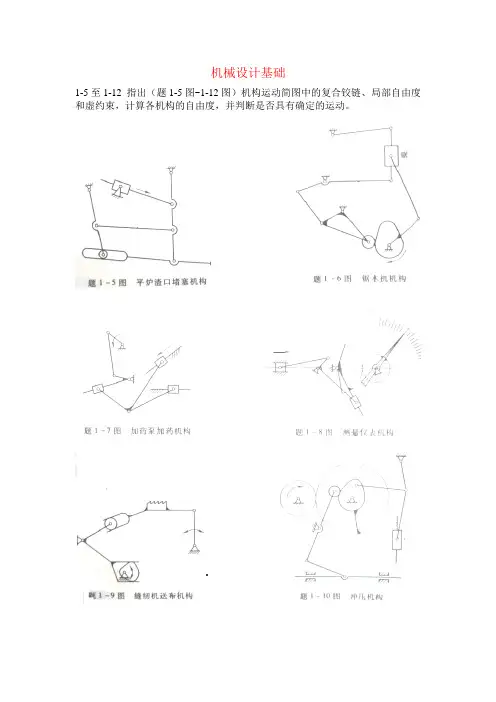
机械设计基础1-5至1-12 指出(题1-5图~1-12图)机构运动简图中的复合铰链、局部自由度和虚约束,计算各机构的自由度,并判断是否具有确定的运动。
1-5 解 F =H L P P n --23=18263-⨯-⨯=11-6 解F =H L P P n --23=111283-⨯-⨯=11-7 解F =H L P P n --23=011283-⨯-⨯=21-8 解F =H L P P n --23=18263-⨯-⨯=11-9 解F =H L P P n --23=24243-⨯-⨯=21-10 解F =H L P P n --23=212293-⨯-⨯=11-11 解F =H L P P n --23=24243-⨯-⨯=21-12 解F =H L P P n --23=03233-⨯-⨯=32-1 试根据题2-1图所标注的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构还是双摇杆机构。
题2-1图答 : a )160907015011040=+<=+,且最短杆为机架,因此是双曲柄机构。
b )1707010016512045=+<=+,且最短杆的邻边为机架,因此是曲柄摇杆机构。
c )132627016010060=+>=+,不满足杆长条件,因此是双摇杆机构。
d )1909010015010050=+<=+,且最短杆的对边为机架,因此是双摇杆机构。
2-3 画出题2-3图所示个机构的传动角和压力角。
图中标注箭头的构件为原动件。
题2-3图解:2-5 设计一脚踏轧棉机的曲柄摇杆机构,如题2-5图所示,要求踏板CD 在水平位置上下各摆10度,且500CD l mm =,1000AD l mm =。
(1)试用图解法求曲柄AB 和连杆BC 的长度;(2)用式(2-6)和式(2-6)’计算此机构的最小传动角。
题2-5图解 : ( 1 )由题意踏板CD 在水平位置上下摆动 10,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
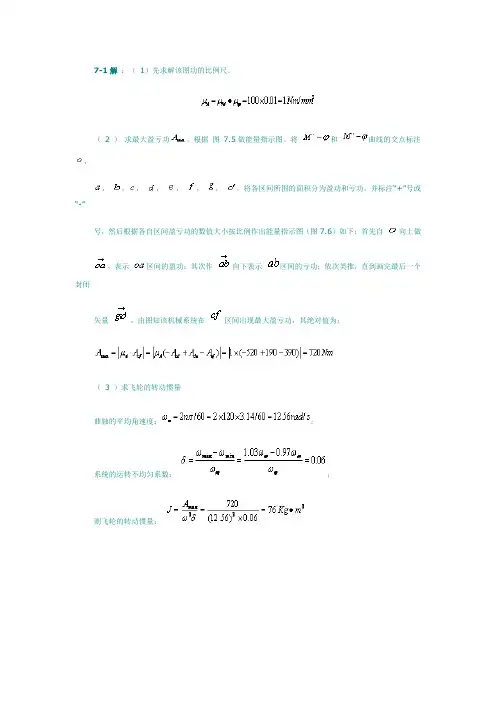
7-1解:(1)先求解该图功的比例尺。
(2 )求最大盈亏功。
根据图7.5做能量指示图。
将和曲线的交点标注,,,,,,,,。
将各区间所围的面积分为盈功和亏功,并标注“+”号或“-”号,然后根据各自区间盈亏功的数值大小按比例作出能量指示图(图7.6)如下:首先自向上做,表示区间的盈功;其次作向下表示区间的亏功;依次类推,直到画完最后一个封闭矢量。
由图知该机械系统在区间出现最大盈亏功,其绝对值为:(3 )求飞轮的转动惯量曲轴的平均角速度:;系统的运转不均匀系数:;则飞轮的转动惯量:图7.5图7.67-2图7.7 图7.8解:(1)驱动力矩。
因为给定为常数,因此为一水平直线。
在一个运动循环中,驱动力矩所作的功为,它相当于一个运动循环所作的功,即:因此求得:(2)求最大盈亏功。
根据图7.7做能量指示图。
将和曲线的交点标注,,,。
将各区间所围的面积分为盈功和亏功,并标注“+”号或“-”号,然后根据各自区间盈亏功的数值大小按比例作出能量指示图(图7.8)如下:首先自向上做,表示区间的盈功;其次作向下表示区间的亏功;然后作向上表示区间的盈功,至此应形成一个封闭区间。
由图知该机械系统在区间出现最大盈亏功。
欲求,先求图7.7中的长度。
如图将图中线1和线2延长交于点,那么在中,相当于该三角形的中位线,可知。
又在中,,因此有:,则根据所求数据作出能量指示图,见图7.8,可知最大盈亏功出现在段,则。
(3)求飞轮的转动惯量和质量。
7-3解:原来安装飞轮的轴的转速为,现在电动机的转速为,则若将飞轮安装在电动机轴上,飞轮的转动惯量为:7-4解:(1)求安装在主轴上飞轮的转动惯量。
先求最大盈亏功。
因为是最大动能与最小动能之差,依题意,在通过轧辊前系统动能达到最大,通过轧辊后系统动能达到最小,因此:则飞轮的转动惯量:(2)求飞轮的最大转速和最小转速。
(3)因为一个周期内输入功和和输出功相等,设一个周期时间为,则:,因此有:。
7-5 解:图7.9一个周期驱动力矩所作的功为:一个周期阻力矩所作的功为:又时段内驱动力矩所做的功为:因此最大盈亏功为:机组的平均角速度为:机组运转不均匀系数为:故飞轮的转动惯量为:7-6答:本书介绍的飞轮设计方法,没有考虑飞轮以外其他构件动能的变化,而实际上其他构件都有质量,它们的速度和动能也在不断变化,因而是近似的。
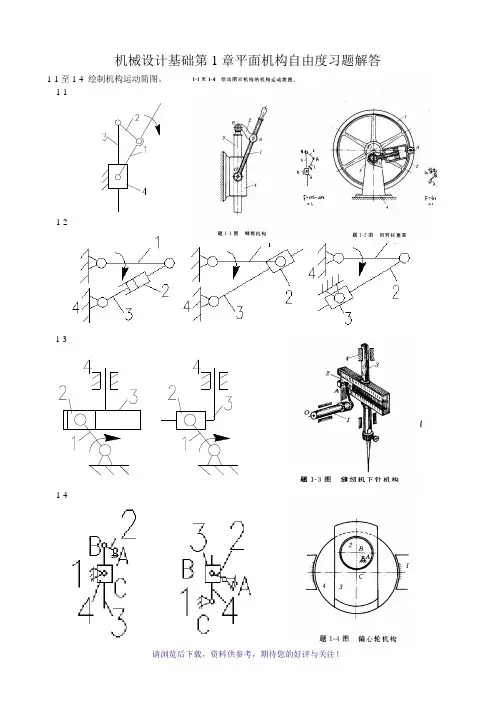
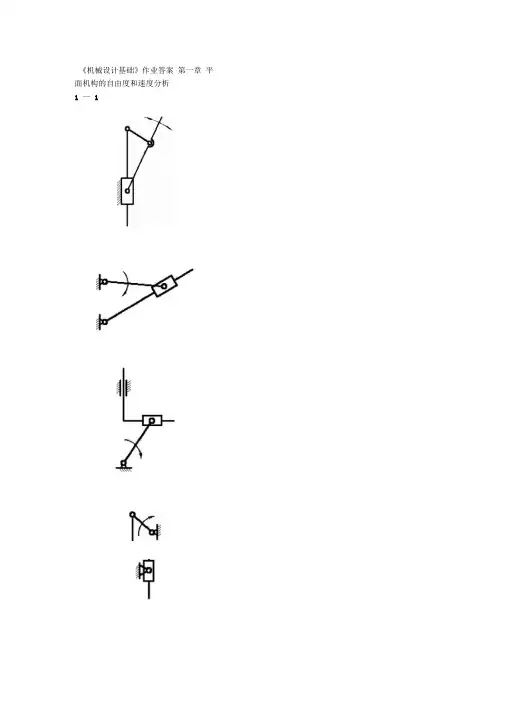
机械设计基础第1章平面机构自由度习题解答1-1至1-4 绘制机构运动简图。
1-11-21-31-41-5至1-12 计算机构自由度局部自由度虚约束局部自由度1-5 有一处局部自由度(滚子),有一处虚约束(槽的一侧),无复合铰链n=6 P L=8 P H=1 F=3×6-2×8-1=11-6 有一处局部自由度(滚子),无复合铰链、虚约束n=8 P L=11 P H=1 F=3×8-2×11-1=11-7 无复合铰链、局部自由度、虚约束n=8 P L=11 P H=0 F=3×8-2×11-0=21-8 无复合铰链、局部自由度、虚约束n=6 P L=8 P H=1 F=3×6-2×8-1=11-9 有两处虚约束(凸轮、滚子处槽的一侧),局部自由度1处,无复合铰链n=4 P L=4 P H=2F=3×4-2×4-2=21-10 复合铰链、局部自由度、虚约束各有一处凸轮、齿轮为同一构件时,n=9 P L=12 P H=2F=3×9-2×12-2=1凸轮、齿轮为不同构件时n=10 P L=13 P H=2 F=3×10-2×13-2=2 图上应在凸轮上加一个原动件。
1-11 复合铰链一处,无局部自由度、虚约束n=4 P L=4 P H=2 F=3×4-2×4-2=2 1-12 复合铰链、局部自由度、虚约束各有一处n=8 P L=11 P H=1 F=3×8-2×11-1=1。
《机械设计根底》十答案
一、填空:
1 原动件数等于机构的自由度数
2 1
3 双曲柄机构
4 不存在
5 大小
6 周向固定传递运动和转矩
7 安装一对平键
8 外径左旋细牙螺纹公称直径12
9 扭转
10 1/3
11 Y Z A B C D E 基准长度2240mm
12 带和两轮接触面之间的摩擦力
13 小于40度
14 变小15 基圆
16 模数相等,压力角相等
17 多平稳
18 76
19 齿面接触疲劳齿根弯曲疲劳强度
20 定轴轮系行星轮系
二、简答
1 图
2 图
3 螺旋升角小于当量摩擦角由于当量摩擦角的关系,三角螺纹自锁最好,矩形最差
4 离心力大转数多
5 大小齿轮材料及热处理硬度差50左右,由于小齿轮转数多,更快失效
三、计算题
1 m=420/(40+2)=10
d1=400 d2= 800 da2=800+20=820
d f1=400-2*1.25m=375
d f2=800-2*1.25m=775
a=10/2(40+80)=600
p=3.14*m=31.4
2 (n1-n H)/(0-n H)=z2 z3/z1 z2'
(-n1/n H)+1=z2 z3/z1 z2'
i1H=1-(39*39/41*41)=0.095。