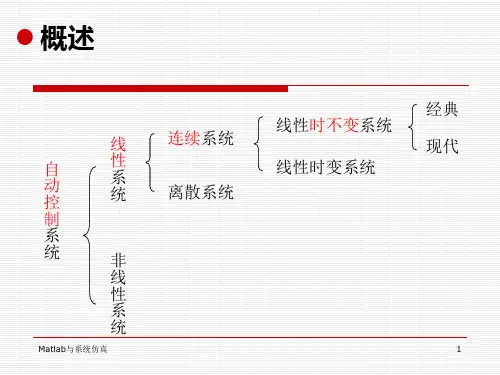
利用MATLAB进行离散控制系统模拟
- 格式:doc
- 大小:275.00 KB
- 文档页数:10
matlab tf、ss、和zpk的控制系统建模实验心得1. 引言1.1 概述控制系统建模是设计和分析工程系统的重要步骤之一。
在这个过程中,我们需要选择适当的数学模型来描述系统的行为,并使其与实际物理现象相匹配。
MATLAB作为一个功能强大的工具,提供了多种方法来进行控制系统建模,其中包括传递函数模型(TF)、状态空间模型(SS)和零极点增益模型(ZPK)。
本文旨在总结和分享我在使用MATLAB中的TF、SS和ZPK进行控制系统建模实验中的经验和心得。
1.2 文章结构本文将按照以下结构展开讨论:- 第二部分将介绍在MATLAB中使用TF进行控制系统建模时的一些重要事项,包括理解传递函数模型以及如何建立该模型。
- 第三部分将介绍使用SS进行控制系统建模时所需注意的事项,包括理解状态空间模型和建立该模型的步骤。
- 第四部分将介绍使用ZPK进行控制系统建模时需要注意的事项,包括理解零极点增益模型和如何建立该模型。
最后,在第五部分中,将对TF、SS和ZPK三种建模方法进行比较,并总结心得体会,并对未来的研究方向进行展望。
1.3 目的本文的目的是帮助读者更好地理解和掌握MATLAB中TF、SS和ZPK建模方法,以便能够准确描述和分析控制系统的行为。
通过分享我的实验心得,我希望能够给读者提供一些在实际应用中使用这些模型时的指导和启示。
让我们开始吧!2. MATLAB中的TF模型建模实验心得2.1 理解传递函数模型在MATLAB中,传递函数(Transfer Function)是一种常用的控制系统建模方法。
它用于描述输入和输出之间的关系,并包含了系统的动态特性。
在进行TF 模型建模时,我们首先需要理解传递函数的含义和作用。
传递函数是指将系统的频率响应与拉普拉斯变换联系起来的函数表达式。
通过分子多项式和分母多项式的比值来表示系统,并使用频率域表达,可以方便地分析系统性能、稳定性以及设计控制器等。
2.2 建立传递函数模型的步骤在MATLAB中,建立传递函数模型可以遵循以下步骤:步骤1:确定系统的数学模型。
实验二基于Matlab的离散控制系统仿真一、实验目的1)学习使用Matlab命令对离散控制系统进行仿真的方法。
2)学习使用Simulink工具箱对离散控制系统进行仿真的方法。
二、实验原理1. 控制系统命令行仿真一阶系统闭环传递函数为3()G ss+3请转换为离散系统脉冲传递函数并仿真。
根据要求实验有实验数据和所得图形如下:连续零极点图函数:离散函数零极点图:连续函数根轨迹图:离散函数根轨迹图:连续函数单位脉冲响应曲线:离散函数单位脉冲响应曲线:连续函数单位阶跃响应:离散函数单位阶跃响应:连续函数波特图:离散函数波特图:连续函数艾奎斯特曲线:离散函数艾奎斯特曲线:连续函数尼科尔斯曲线:离散函数尼科尔斯曲线:2. 控制系统simulink 仿真按图建立系统的Simulink 模型,对不同的输入信号进行仿真,改变参数,观察不同的仿真结果。
图1 控制系统Simulink 仿真图解答于实验内容第二问三、实验内容1) 二阶系统传递函数为225()4+25G s s s =+,请转换为零极点模型,离散系统模型(采样时间为1),以及离散零极点模型,并进行基于matlab 命令的仿真研究(求连续和离散系统的单位脉冲响应、单位阶跃响应、零极点分布图、根轨迹、波特图、奈奎斯特曲线、尼科尓斯曲线等)。
根据题意实验所得有:连续单位脉冲响应连续单位阶跃响应连续零极点分布图离散零极点分布图连续根轨迹连续波特图连续奈奎斯特曲线连续尼科尓斯曲线2)按图1建立系统的Simulink模型,对不同的输入信号进行仿真。
改变模型参数,观察不同的仿真结果。
Step输入:Ramp输入:当函数分子分别为1,10,100,500时有:经过实验可以看出分子越大超调越大,调整时间越大。
3)将上述系统离散化并基于Simulink仿真,观察仿真结果。
根据题意实验有:Step输入:Ramp输入:分子为1时:Step输入:Ramp输入:分子为250时:Step输入:Ramp输入:四、实验报告1)按照实验报告所要求的统一格式,填写实验报告;2)记录实验过程、实验结果和图表。
使用Matlab技术进行离散事件模拟的基本方法在现代科学和工程领域中,离散事件模拟扮演着重要的角色。
它可以模拟基于事件序列的系统,通过模拟事件的先后顺序和相互作用,从而预测系统的行为。
离散事件模拟在交通、制造、通信等领域得到广泛应用。
而Matlab作为一种功能强大的数值计算工具,为进行离散事件模拟提供了很多方便和灵活的工具。
本文将介绍使用Matlab技术进行离散事件模拟的基本方法。
首先,我们将探讨离散事件模拟的基本概念和原理。
然后,我们将介绍如何使用Matlab编写离散事件模拟程序,并给出实例进行演示。
离散事件模拟是一种基于事件时间的动态模拟方法。
它假设系统在离散的时间点上发生事件,并通过模拟事件的处理来预测系统的行为。
在离散事件模拟中,系统中的事件可以是实际的操作、状态变化或信号触发等。
每个事件都有一个具体的发生时间和相关的信息。
通过模拟这些事件的先后顺序和相互作用,可以得到对系统行为的预测和分析。
在进行离散事件模拟时,首先需要定义系统中的事件以及它们之间的关系和相互作用。
这可以通过构建事件模型来实现。
事件模型通常由三个元素组成:状态变量、事件触发规则和事件处理程序。
状态变量表示系统的状态,事件触发规则确定事件何时发生,事件处理程序定义事件发生时系统的行为和响应。
使用Matlab进行离散事件模拟需要借助一些工具和技术。
Matlab提供了一系列的函数和工具箱,用于处理离散事件模拟中的常见问题。
它具有强大的数值计算和数据处理能力,可以方便地对事件序列进行建模和分析。
在使用Matlab进行离散事件模拟时,可以采用事件驱动的编程模式。
即通过监听和处理事件来驱动程序的执行。
这可以通过Matlab中的事件处理器和回调函数实现。
事件处理器可以捕获触发的事件,并调用相应的处理程序进行响应。
回调函数则允许在特定事件发生时调用用户自定义的函数。
为了更好地理解如何使用Matlab进行离散事件模拟,我们以一个生产线的例子来进行说明。

如何在Matlab中进行离散系统设计离散系统设计在工程领域中扮演着重要的角色。
离散系统指的是使用一系列离散时间点进行操作和观测的系统。
而Matlab作为一种强大的数学软件,提供了丰富的工具和函数来进行离散系统设计。
本文将介绍如何使用Matlab进行离散系统设计,并提供一些实际案例来帮助读者理解和应用这些概念。
一、离散系统和离散系统设计概述离散系统是指系统的状态和输出在离散时间点上进行操作和观测,与连续系统相对应。
离散系统设计的目标是通过对系统进行建模、分析和控制,以实现所需的性能指标。
离散系统设计的基本步骤包括系统建模、性能分析和控制器设计。
系统建模是指将实际系统抽象为数学模型,以方便进行分析和设计。
性能分析是评估系统在不同工况下的性能表现,如稳定性、响应速度等。
控制器设计是根据性能要求设计出合适的控制器,使得系统能够满足需求。
二、Matlab中的离散系统建模在Matlab中,可以使用多种方法进行离散系统的建模。
最常用的方法是差分方程法和状态空间法。
差分方程法是将系统的输入输出关系表示为差分方程的形式,而状态空间法则是使用状态向量和状态方程来描述系统的动态行为。
在使用差分方程法进行建模时,可以使用Matlab中的函数tf或zpk来创建传递函数模型。
传递函数模型是用来描述系统输入和输出之间的关系的一种数学表达式。
例如,通过以下代码可以创建一个二阶传递函数模型:```matlabnum = [1, 0.5];den = [1, -0.6, 0.08];sys = tf(num, den, 1);```在使用状态空间法进行建模时,可以使用Matlab中的函数ss来创建状态空间模型。
状态空间模型是使用状态向量和状态方程来描述系统的动态行为的一种数学表达式。
例如,通过以下代码可以创建一个二阶状态空间模型:```matlabA = [0, 1; -0.08, 0.6];B = [0; 1];C = [1, 0.5];D = 0;sys = ss(A, B, C, D, 1);```三、离散系统性能分析离散系统的性能分析是评估系统在不同工况下的性能表现,如稳定性、响应速度等。
数字信号处理课程实验报告实验名称离散信号及离散系统的MATLAB编程实现系别教师姓名实验地点实验日期一、实验内容1、用MATLAB仿真(编写)离散序列2、常见序列运算3、差分方程的求解4、系统零极点的求解。
(红色部分为必做项目)二、实验目的1. 复习离散时间的信号和系统,复习离散时间重要类型的信号和它们的运算的实现。
2. 熟悉MATLAB软件的集成开发环境,学会利用MATLAB编程及获得帮助的方法。
3. 学会利用MATLAB的绘图功能。
三、涉及实验的相关情况介绍(包含使用软件或实验设备等情况)matlab软件,计算机四、实验试做记录(含程序、数据记录及分析)1、 Matlab表示序列MATLAB中,可采用向量表示序列,由于MATLAB中对序列下标默认为从1开始递增,因此要表示离散信号,一般应采用两个向量分别对信号的自变量和因变量进行描述。
如, n= -3~4,在MATLAB中表示为>> n = [-3, -2, -1, 0, 1, 2, 3, 4]; %自变量取值>> x = [ 2, 1, -1, 0, 1, 4, 3, 7]; %因变量取值说明:(1)向量可用方括号[ ]表示。
(2)当向量取值连续变化时可用冒号运算符“:”简化赋值过程,如的n值,可简化为n=[-3:4]或n= -3:4 。
(3)分号“;”表示不回显表达式的值。
(4)“%”表示其后内容为注释对象。
(5)符号“>>”是MATLAB命令窗口的输入提示符,此外,为便于多次调用,也可在m文件中输入相应的命令语句。
利用MATLAB,还可对信号的波形进行描述,常采用的绘图语句有stem,plot,subplot, axis,title,xlabel,ylabel,gtext, hold on, hold off, grid 等。
其中stem 绘制离散图形;plot 绘制连续图形;subplot 用于绘制子图,应在stem 或plot 语句前调用;axis 指定x 和y轴的取值范围,用在stem或plot语句后;title 标注图形名称,xlabel, ylabel 分别标注x轴和y轴名称;gtext可将标注内容放置在鼠标点击处;hold on和 hold off 用于控制对象绘制方式,是在原图上还是在新图上绘制;grid用于绘制网格。
使用Matlab进行控制系统设计的基本步骤控制系统设计是一项重要的工程任务,它涉及到系统建模、控制器设计和系统分析等方面。
而Matlab作为一款强大的数学工具软件,提供了丰富的功能和工具,可以帮助工程师实现控制系统设计的各个环节。
本文将介绍使用Matlab进行控制系统设计的基本步骤。
一、系统建模控制系统设计的第一个关键步骤是系统建模。
系统建模是将实际的物理系统或过程转化为数学方程的过程。
Matlab提供了多种建模方法,可以根据实际需求选择适合的方法。
1.1 时域建模时域建模是一种基于微分方程和代数方程的建模方法,适合描述连续系统的动态特性。
可以使用Matlab的Simulink工具箱进行时域建模,通过拖拽模块和连接线的方式,构建系统模型。
1.2 频域建模频域建模是一种基于频率响应的建模方法,适合描述系统的幅频、相频特性。
可以使用Matlab的控制系统工具箱进行频域建模,通过输入系统的传递函数或状态空间矩阵,得到系统的频域特性。
1.3 时频域建模时频域建模是一种综合了时域和频域特性的建模方法,适合描述非线性和时变系统。
可以使用Matlab的Wavelet工具箱进行时频域建模,通过连续小波变换或离散小波变换,得到系统的时频域特性。
二、控制器设计在系统建模完成后,接下来是设计控制器。
控制器设计的目标是使得系统具有所需的稳定性、响应速度和鲁棒性等性能。
2.1 经典控制器设计Matlab提供了经典控制器的设计函数,如比例控制器(P控制器)、比例积分控制器(PI控制器)和比例积分微分控制器(PID控制器)等。
可以根据系统的特性和性能要求,选择合适的控制器类型和调节参数。
2.2 线性二次调节器设计线性二次调节(LQR)是一种优化控制方法,可以同时优化系统的稳态误差和控制能量消耗。
在Matlab中,可以使用lqr函数进行LQR控制器的设计,通过调整权重矩阵来获得不同的控制性能。
2.3 非线性控制器设计对于非线性系统,经典控制器往往无法满足要求。
如何在MATLAB中进行控制系统的建模与仿真在现代工程领域中,控制系统的建模与仿真是必不可少的一项技术。
MATLAB 作为一种强大的科学计算软件,并提供了丰富的工具箱,可以帮助工程师们快速而准确地进行控制系统的建模和仿真。
本文将介绍如何在MATLAB中进行控制系统的建模与仿真的一般步骤和注意事项。
一、引言控制系统是一种以实现某种特定目标为目的对系统进行调节和控制的技术,在现代工程中得到了广泛的应用。
控制系统的建模与仿真是控制系统设计的重要环节,通过建立系统的数学模型,可以对系统的性能进行有效地评估和分析,从而为系统的设计和优化提供指导。
二、MATLAB中的控制系统建模工具箱MATLAB提供了专门的控制系统工具箱,包括线性和非线性系统建模、控制器设计与分析等功能。
其中,Simulink是MATLAB中最重要的控制系统建模工具之一,它可以方便地用来搭建控制系统的框架,并进行仿真与分析。
三、建立控制系统数学模型在进行控制系统的建模之前,需要先确定系统的类型和工作原理。
常见的控制系统包括开环控制系统和闭环控制系统。
开环控制系统中,控制器的输出不受被控对象的反馈作用影响;闭环控制系统中,控制器的输出受到被控对象的反馈作用影响。
在MATLAB中,可以通过使用Transfer Function对象或State Space对象来表示控制系统的数学模型。
Transfer Function对象用于线性时不变系统的建模,可以通过给定系统的分子多项式和分母多项式来定义一个传递函数;State Space对象则适用于非线性时变系统的建模,可以通过状态空间方程来定义系统。
四、利用Simulink搭建控制系统框架Simulink是一种基于图形化编程的建模仿真工具,在MATLAB中可以方便地使用它来搭建控制系统的框架。
通过简单地拖拽、连接不同的模块,可以构建出一个完整的控制系统模型。
首先,打开Simulink,选择相应的控制系统模板或从头开始设计自己的模型。
如何使用Matlab进行系统建模和仿真一、引言在现代科学和工程领域,系统建模和仿真是解决实际问题和优化设计的重要手段之一。
Matlab作为一种功能强大的工具,被广泛应用于系统建模和仿真。
本文将介绍如何使用Matlab进行系统建模和仿真的基本步骤,并通过实例演示其应用。
二、系统建模系统建模是将实际系统抽象成数学或逻辑模型的过程。
在Matlab中,可以使用符号表达式或差分方程等方式对系统进行建模。
1. 符号表达式建模符号表达式建模是一种基于符号计算的方法,可以方便地处理复杂的数学运算。
在Matlab中,可以使用符号工具箱来进行符号表达式建模。
以下是一个简单的例子:```matlabsyms xy = 2*x + 1;```在上述例子中,定义了一个符号变量x,并使用符号表达式2*x + 1建立了y的表达式。
通过符号工具箱提供的函数,可以对y进行求导、积分等操作,从而分析系统的特性。
2. 差分方程建模差分方程建模是一种基于离散时间的建模方法,适用于描述离散时间系统。
在Matlab中,可以使用差分方程来描述系统的行为。
以下是一个简单的例子:```matlabn = 0:10;x = sin(n);y = filter([1 -0.5], 1, x);```在上述例子中,定义了一个离散时间信号x,通过filter函数可以求得系统响应y,其中[1 -0.5]表示系统的差分方程系数。
三、系统仿真系统仿真是利用计算机模拟系统的运行过程,通过数值计算得到系统的输出响应。
在Matlab中,可以使用Simulink工具箱进行系统仿真。
1. 搭建系统框图在Simulink中,我们可以使用各种模块来搭建系统的框图。
例如,可以使用连续时间积分器模块和乘法器模块来构建一个简单的比例积分控制器:在上图中,积分器模块表示对输入信号积分,乘法器模块表示对输入信号进行放大。
实验利用MATLAB进行离散控制系统模拟本试验的目的主要是让学生初步掌握MATLAB软件在离散控制系统分析和设计中的应用。
1.连续系统的离散化。
在MATLAB软件中,对连续系统的离散化主要是利用函数c2dm( )函数来实现的,c2dm( )函数的一般格式为C2dm( num, den, T, method),可以通过MATLAB的帮助文件进行查询。
其中:Num:传递函数分子多项式系数;Den:传递函数分母多项式系数;T:采样周期;Method:转换方法;允许用户采用的转换方法有:零阶保持器(ZOH)等五种。
2.求离散系统的相应:在MATLAB中,求采样系统的响应可运用dstep( ),dimpulse( ),dlsim( )来实现的。
分别用于求取采样系统的阶跃,脉冲,零输入及任意输入时的响应,其中dstep( )的一般格式如下:dstep( num, den, n),可以通过MATLAB的帮助文件进行查询。
其中:Num:传递函数分子多项式系数;Den:传递函数分母多项式系数;N:采样点数;3.此外,离散控制系统也可以用simulink工具箱进行仿真,仿真界面如下图(采样周期可以在对应模块中进行设定)。
1.编制程序实现上面三个仿真程序。
2.把得到的图形和结果拷贝在试验报告上。
3.在第1个例子中,改变采样周期为0.25,重新运行程序,把结果和原来结果进行比较,并说明为什么?4.在第2个例子中,改变采样点数为70,重新运行程序,把结果和原来结果进行比较,并说明为什么?同样,改变采样周期T,观察不同周期下系统阶跃响应的动态性能,分析采样周期对系统动态性能的影响。
1.1)num=10;den=[1,7,10];t=0.1[numz,denz]=c2dm(num,den,t,'zoh');printsys(numz,denz,'z')得出结果:t =0.1000num/den =0.039803 z + 0.031521------------------------z^2 - 1.4253 z + 0.49659若t改为0.25:num=10;den=[1,7,10];t=0.25[numz,denz]=c2dm(num,den,t,'zoh'); printsys(numz,denz,'z')得出结果为:t =0.2500num/den =0.18012 z + 0.10062-------------------------z^2 - 0.89304 z + 0.173772)num=10;den=[1,7,10];t=0.25;i=[0:35];time=i*t;[numz,denz]=c2dm(num,den,t,'zoh'); yc=step(num,den,time);y_zoh=dstep(numz,denz,36);[xx,yy]=stairs(time,y_zoh);plot(time,yc,'r'),holdplot(xx,yy,'r'),hold;grid采样点数改为70:num=10;den=[1,7,10];t=0.1;i=[0:70];time=i*t;[numz,denz]=c2dm(num,den,t,'zoh'); yc=step(num,den,time);y_zoh=dstep(numz,denz,71);[xx,yy]=stairs(time,y_zoh);plot(time,yc,'r'),hold周期改为0.25:3num=[0.008,0.072];den=[1,-1.905,0.905];t=0.1;i=[0:35];time=i*t;[numz,denz]=c2dm(num,den,t,'zoh'); yc=step(num,den,time);y_zoh=dstep(numz,denz,36);[xx,yy]=stairs(time,y_zoh);plot(time,yc,'r'),holdplot(xx,yy,'r'),hold;gridSimulink 实现:仿真时间:10仿真时间700:3(3) 采样周期不同,得出的Z变换也不同,说明Z变换的结果随采样周期的变化而变化。
离散系统频域分析及matlab实现
离散系统频域分析是对离散系统在频域上的特性进行研究的一种方法,主要包括幅频
特性和相频特性。
频域分析可以通过傅里叶变换、z变换等数学工具进行处理,并通过MATLAB等工具进行模拟实现。
幅频特性是指系统在不同频率下输出信号的幅度随输入信号幅度变化的特性。
幅频特
性通常用幅度响应函数来描述,它表示了系统对输入信号不同频率分量的增益或衰减程度。
以传递函数为基础的离散系统可以通过对其传递函数进行离散化得到差分方程和单位抽样
响应,然后通过对单位抽样响应进行傅里叶变换得到离散系统的频率响应函数。
在MATLAB 中,可以使用freqz函数计算离散系统的频率响应函数,并进一步计算幅度响应函数。
对于复杂的离散系统,可以通过级联、并联和反馈等方法进行分析和设计。
在MATLAB 中,可以使用series、parallel和feedback等函数进行组合模拟。
实验利用MATLAB进行离散控制系统模拟本试验的目的主要是让学生初步掌握MATLAB软件在离散控制系统分析和设计中的应用。
1.连续系统的离散化。
在MATLAB软件中,对连续系统的离散化主要是利用函数c2dm( )函数来实现的,c2dm( )函数的一般格式为
C2dm( num, den, T, method),可以通过MATLAB的帮助文件进行查询。
其中:
Num:传递函数分子多项式系数;
Den:传递函数分母多项式系数;
T:采样周期;
Method:转换方法;
允许用户采用的转换方法有:零阶保持器(ZOH)等五种。
2.求离散系统的相应:
在MATLAB中,求采样系统的响应可运用dstep( ),dimpulse( ),dlsim( )来实现的。
分别用于求取采样系统的阶跃,脉冲,零输入及任意输入时的响应,其中dstep( )的一般格式如下:
dstep( num, den, n),可以通过MATLAB的帮助文件进行查询。
其中:
Num:传递函数分子多项式系数;
Den:传递函数分母多项式系数;
N:采样点数;
3.此外,离散控制系统也可以用simulink工具箱进行仿真,仿真界面
如下图(采样周期可以在对应模块中进行设定)。
1.编制程序实现上面三个仿真程序。
2.把得到的图形和结果拷贝在试验报告上。
3.在第1个例子中,改变采样周期为0.25,重新运行程序,把结果和原来结果进行比较,并说明为什么?
4.在第2个例子中,改变采样点数为70,重新运行程序,把结果和原来结果进行比较,并说明为什么?同样,改变采样周期T,观察不同周
期下系统阶跃响应的动态性能,分析采样周期对系统动态性能的影响。
1.
1)
num=10;
den=[1,7,10];
t=0.1
[numz,denz]=c2dm(num,den,t,'zoh');
printsys(numz,denz,'z')
得出结果:
t =
0.1000
num/den =
0.039803 z + 0.031521
------------------------
z^2 - 1.4253 z + 0.49659
若t改为0.25:
num=10;
den=[1,7,10];
t=0.25
[numz,denz]=c2dm(num,den,t,'zoh'); printsys(numz,denz,'z')
得出结果为:
t =
0.2500
num/den =
0.18012 z + 0.10062
-------------------------
z^2 - 0.89304 z + 0.17377
2)
num=10;
den=[1,7,10];
t=0.25;
i=[0:35];
time=i*t;
[numz,denz]=c2dm(num,den,t,'zoh'); yc=step(num,den,time);
y_zoh=dstep(numz,denz,36);
[xx,yy]=stairs(time,y_zoh);
plot(time,yc,'r'),hold
plot(xx,yy,'r'),hold;grid
采样点数改为70:
num=10;
den=[1,7,10];
t=0.1;
i=[0:70];
time=i*t;
[numz,denz]=c2dm(num,den,t,'zoh'); yc=step(num,den,time);
y_zoh=dstep(numz,denz,71);
[xx,yy]=stairs(time,y_zoh);
plot(time,yc,'r'),hold
周期改为0.25:
3
num=[0.008,0.072];
den=[1,-1.905,0.905];
t=0.1;
i=[0:35];
time=i*t;
[numz,denz]=c2dm(num,den,t,'zoh'); yc=step(num,den,time);
y_zoh=dstep(numz,denz,36);
[xx,yy]=stairs(time,y_zoh);
plot(time,yc,'r'),hold
plot(xx,yy,'r'),hold;grid
7
6
5
4
3
2
1
0 Simulink实现:
仿真时间:10
仿真时间700:
3
(3) 采样周期不同,得出的Z变换也不同,说明Z变换的结果随采样周期的变化而变化。
(4)采样点数越多,输出越平稳,采样周期时间越长,系统达到平稳速度越慢。
采样周期
越长,动态性能越差。