声发射源的定位方法
- 格式:docx
- 大小:36.87 KB
- 文档页数:2
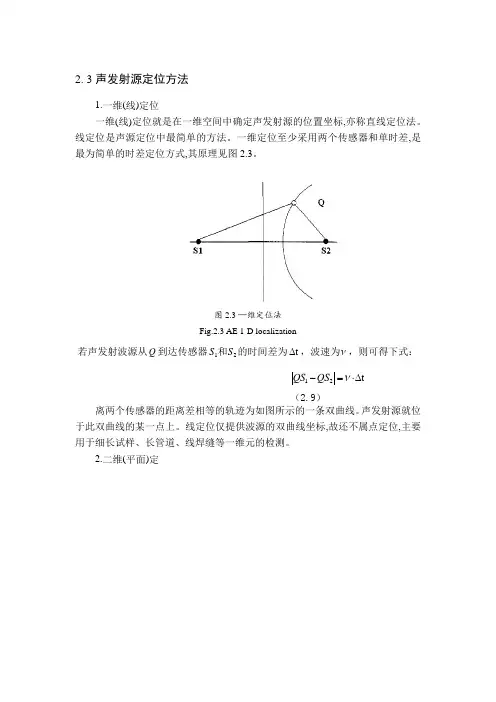
2. 3声发射源定位方法1.一维(线)定位一维(线)定位就是在一维空间中确定声发射源的位置坐标,亦称直线定位法。
线定位是声源定位中最简单的方法。
一维定位至少采用两个传感器和单时差,是最为简单的时差定位方式,其原理见图2.3。
图2.3 —维定位法Fig.2.3 AE 1-D localization 若声发射波源从Q 到达传感器21S S 和的时间差为t ∆,波速为ν,则可得下式: t 21∆⋅=-νQS QS(2.9)离两个传感器的距离差相等的轨迹为如图所示的一条双曲线。
声发射源就位于此双曲线的某一点上。
线定位仅提供波源的双曲线坐标,故还不属点定位,主要用于细长试样、长管道、线焊缝等一维元的检测。
2.二维(平面)定图2.4 二维(平面)定位法Fig.2.4 AE 2-D localization二维定位至少需要三个传感器和两组时差,但为得到单一解一般需要四个传感器三组时差。
传感器阵列可任意选择,但为运算简便,常釆用简单阵列形式,如三角形、方形、菱形等。
近年来,任意三角形阵列及连续多阵列方式也得到应用。
就原理而言,波源的位置均为两组或三组双曲线的交点所确定。
由四个传感器构成的菱形阵列平面定位原理见图2.4。
若由传感器31S S 和间的时差X t ∆所得双曲线为1,由传感器42S S 和间的时Y t ∆所得双曲线为2,波源Q 离传感器31S S 和,42S S 和的距离分别为Y X L L 和,波速为ν,两组传感器间距分别为a 和b ,那么,波源就位于两条双曲线的交点()Y X Q ,上,其坐标可由下面方程求出: ⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛=⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛122b 2122a 22222222222Y Y X X L X L Y L Y L X (2.10)平面定位除了上述菱形定位方式外,常见的还有三角形定位、四边形定位、传感器任意布局定位等。
全相位与Geiger算法的岩石声发射源定位方法黄晓红;孙国庆;张凯月【摘要】Geiger定位算法在岩石定位分析中得到广泛应用,但是对初始值要求非常严格,若初始值选择不当,则很难进入收敛范围。
为了提高定位精度,减少迭代次数,针对这些问题,提出全相位与Geiger算法的岩石声发射源定位方法。
首先进行花岗岩(50 mm×100 mm×50 mm)断铅实验,接着充分利用全相位FFT 相位不变性的优势分析断铅信号,通过相位差法求出时延同时反演声发射源求出Geiger迭代初始值,最后综合最小二乘法与Geiger算法,迭代求出最优解。
实验仿真结果显示此算法的平均误差相比美国PCI-2型声发射仪器定位结果降低了约5 mm,有效解决了Geiger初始值选取的问题,能够迅速进入收敛范围,提高了收敛速度和定位精度。
%Geiger localization algorithm is widely used in the analysis of rock localization,however,it is very strict on the initial value,if the initial value is not properly selected,it is difficult to enter the convergence range. In order to improve the positioning precision and reduce the number of iterations,rock acoustic emission source localization method based on all phase and Geiger algorithm is put forward. First of all,the experiment was carried out on the granite(50 mm×100 mm×50 mm). Secondly,making full use of the advantage of apfft phase invariance to analyse the lead signal,and the delay time is obtained by the phase difference method,at the same time,the initial value of the Geiger iteration is obtained by the inversion of the acoustic emission source. In the end,combining least square method and Geiger algorithm to obtain optimum solution. Experimental simulation results are shown:Comparingthe positioning results of the United States PCI-2 type acoustic emission instrument,the average error decreased by about 5 mm. This method can effectively solve the problem of selecting the initial value of Geiger,so that it can quickly enter the convergence range,improving the convergence speed and positioning accuracy.【期刊名称】《传感技术学报》【年(卷),期】2016(029)011【总页数】6页(P1705-1710)【关键词】信号分析;声发射源定位;全相位相位差;Geiger;最小二乘法【作者】黄晓红;孙国庆;张凯月【作者单位】华北理工大学信息工程学院,河北唐山063009;华北理工大学电气工程学院,河北唐山063009;华北理工大学信息工程学院,河北唐山063009【正文语种】中文【中图分类】TU45在一般情况下,由于受力或其它作用下,材料产生瞬间弹性波的现象被称为声发射AE(Acoustic Emission)。
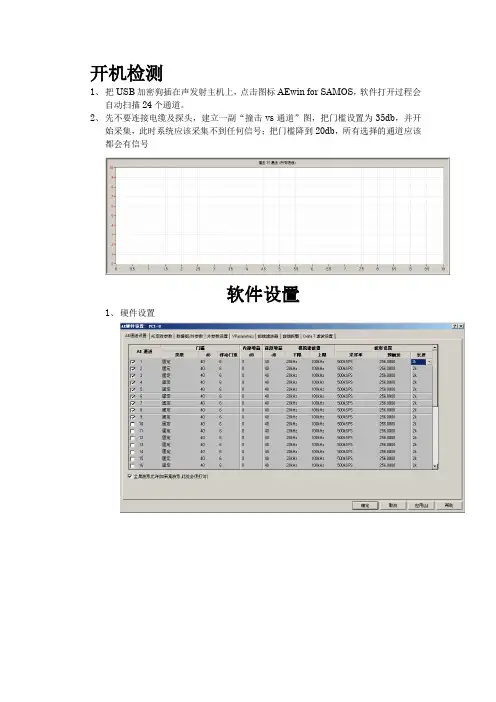
开机检测
1、把USB加密狗插在声发射主机上,点击图标AEwin for SAMOS,软件打开过程会
自动扫描24个通道。
2、先不要连接电缆及探头,建立一副“撞击vs通道”图,把门槛设置为35db,并开
始采集,此时系统应该采集不到任何信号;把门槛降到20db,所有选择的通道应该都会有信号
软件设置
1、硬件设置
2、定位设置
一号探头布置在正北方向,所有探头按顺时针排列。
3、定位设置
(1)定位图
(2)各个通道幅值随时间的散点图
(3)撞击随时间的累积图
(4)波形图
测试步骤
1、正确连接探头、长电缆、短电缆,并保证它们一一对应。
2、观察所有探头背景噪音。
3、用橡皮锤或木锤敲击每个探头附近,因锤击信号很大,所有探头应该都能达到满幅值
99db。
4、把门槛调至80db,在每个探头附近断三次铅,通过行列表,记录每个探头的断铅响应
以及计算它们的平均值。
5、把门槛降至35-40db,开始采集并保存数据。
一般数据记录时间为两小时,若信号量非
常少,可相应缩短检测时间为1.5小时;若信号量非常大,可适当延长检测时间为2.5-3小时。
6、停止采集,并把声发射系统的数据保存到笔记本电脑中。
(由于连接步骤的第4部,笔
记本电脑的某个磁盘是声发射系统的自盘,所以数据可以直接拷贝)
7、关机,右键点击声发射主机的任务栏选择“任务管理器”,选择关机。
突发型声发射信号线性定位实验目的:1、了解声发射信号处理的过程。
2、了解声发射线性定位的原理。
3、学会做声发射定位实验和数据分析。
实验工具:1、两通道及以上声发射采集系统一套。
2、声发射线性定位软件包。
3、材质均匀的不锈钢板/条一块。
4、标定铅笔一套。
实验内容:以标定铅笔芯折断为信号源,在钢板上做定位实验,分析取得的数据,并对定位精度进行分析。
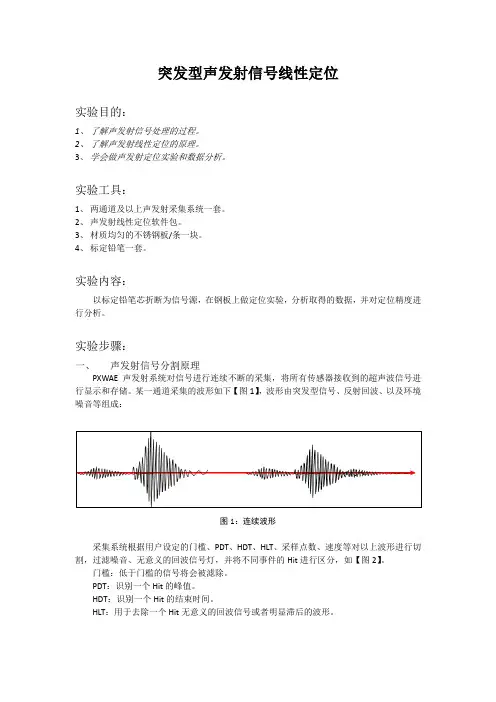
实验步骤:一、声发射信号分割原理PXWAE声发射系统对信号进行连续不断的采集,将所有传感器接收到的超声波信号进行显示和存储。
某一通道采集的波形如下【图1】,波形由突发型信号、反射回波、以及环境噪音等组成:图1:连续波形采集系统根据用户设定的门槛、PDT、HDT、HLT、采样点数、速度等对以上波形进行切割,过滤噪音、无意义的回波信号灯,并将不同事件的Hit进行区分,如【图2】。
门槛:低于门槛的信号将会被滤除。
PDT:识别一个Hit的峰值。
HDT:识别一个Hit的结束时间。
HLT:用于去除一个Hit无意义的回波信号或者明显滞后的波形。
图2:分割成Hit根据门槛确认每个Hit的到达时间,同一个事件的Hit在不同通道的到达时间T1、T2作为参数,进行线性定位的运算。
图3:不同通道收到的同一Hit二、声发射线性定位的原理声发射线性定位的实验图如下。
传感器1、传感器2和断铅点在同一直线上,在传感器1和传感器2之间的某处产生断铅信号。
图4:线性定位假设在星号处断铅,信号沿着材料分别向左右传播,到达1、2号传感器的时间差等于距离差除以波形传播速度的值(式1)。
T1-T2=(D1-D2)/V (式1)由于我们事先知道传感器1和传感器2的位置,可得(式2)。
D1+D2=D (式2)由公式1和公式2可以计算出(式3)。
D1=((T1-T2)*V+D)/2 (式3)根据传感器1的位置和D1即可以确定信号源的点。
三、系统硬件布置将声发射系统传感器、放大器、采集器、电脑主机等按照【图5】进行连接,保证系统可以正常运行。

2. 3声发射源定位方法1.一维(线)定位一维(线)定位就是在一维空间中确定声发射源的位置坐标,亦称直线定位法。
线定位是声源定位中最简单的方法。
一维定位至少采用两个传感器和单时差,是最为简单的时差定位方式,其原理见图2.3。
图2.3 —维定位法Fig.2.3 AE 1-D localization 若声发射波源从Q 到达传感器21S S 和的时间差为t ∆,波速为ν,则可得下式: t 21∆⋅=-νQS QS(2.9)离两个传感器的距离差相等的轨迹为如图所示的一条双曲线。
声发射源就位于此双曲线的某一点上。
线定位仅提供波源的双曲线坐标,故还不属点定位,主要用于细长试样、长管道、线焊缝等一维元的检测。
2.二维(平面)定图2.4 二维(平面)定位法Fig.2.4 AE 2-D localization二维定位至少需要三个传感器和两组时差,但为得到单一解一般需要四个传感器三组时差。
传感器阵列可任意选择,但为运算简便,常釆用简单阵列形式,如三角形、方形、菱形等。
近年来,任意三角形阵列及连续多阵列方式也得到应用。
就原理而言,波源的位置均为两组或三组双曲线的交点所确定。
由四个传感器构成的菱形阵列平面定位原理见图2.4。
若由传感器31S S 和间的时差X t ∆所得双曲线为1,由传感器42S S 和间的时Y t ∆所得双曲线为2,波源Q 离传感器31S S 和,42S S 和的距离分别为Y X L L 和,波速为ν,两组传感器间距分别为a 和b ,那么,波源就位于两条双曲线的交点()Y X Q ,上,其坐标可由下面方程求出: ⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛=⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛122b 2122a 22222222222Y Y X X L X L Y L Y L X (2.10)平面定位除了上述菱形定位方式外,常见的还有三角形定位、四边形定位、传感器任意布局定位等。
石灰岩声发射分析及源定位研究关键词:声发射石灰岩互相关声发射源定位材料或结构在受力或其他作用下产生变形或断裂,产生瞬间弹性波的现象称为声发射(acoustic emission, ae)[1]。
声发射可以对岩石类材料内部裂纹的产生和扩展进行连续监控,是目前应用于岩石类材料破坏研究领域的重要手段[2]。
现阶段声发射源定位是通过在岩石样品表面安装多个传感器来获取声发射信号的时间差来实现损伤定位[3]。
国内外很多学者围绕声发射的产生机理进行了深入而广泛的研究,取得了重要成果。
对岩石类材料声发射源进行定位研究,可以实现对其内部损伤的分析[4],做好安全预警,为岩石破裂失稳预报奠定了一定的工作基础。
一、小波分析小波变换(wavelet transform)是1984年法国地球物理学家j.morlet在分析处理地球物理勘探资料时提出来的,其后理论物理学家a.grossman采用平移和伸缩不变性建立了小波变换的理论体系。
小波分析是一种新兴技术,基本思想可以简单概括为:自然界各种信号中频率高低不同的分量具有不同的时变特性,一般是低频成分的频谱特征随时间的变化比较缓慢,需要在时间域具有较高的精度,而高频成分的频谱特征则变化较快,需要频率域具有较高的精度。
能够在“高中心频率”时自动变窄,而在“低中心频率”时自动变宽。
1.小波去噪二维定位情况下考虑一组传感器(3个),通过小波分析对接收到的声发射信号进行去噪处理,滤除信号中的部分噪声,使得声发射信号更精确地反映岩石内部损伤的过程。
从信的角度来说,小波去噪是对信号进行滤波,在去噪后还能成功地保留原始信号的特征号学,所以在这一点上优于传统的低通滤波器。
因此,小波去噪实际上是提取特征参数和低通滤波功能的综合。
2.互相关分析两个随机的时间历程和互相关函数的定义是在时,在时乘积的平均值,即:如果对,均以的时间间隔进行采样,而单位延迟时间,那么,。
n为延迟时间序列,r为时间序列,则可写成:由于互相关函数和都有物理单位,互相关函数值的大小不能说明这两个函数的相关程度如何,而且需要严格的尺度和物理量换算过程,因此在实际处理中,常用互相关系数来表达,即:以上分析可以看出,找出互相关系数最大值对应的时刻,即可确定两个传感器之间接收到信号的时差。
㊀2021年㊀第5期仪表技术与传感器Instrument㊀Technique㊀and㊀Sensor2021㊀No.5㊀基金项目:国家重点研发计划项目(2018YFF0214703)收稿日期:2020-06-04声发射检测信号分析及源定位方法研究童国炜,周循道,黄林轶,陈超英,徐华伟,杨㊀林(工业和信息化部电子第五研究所,智能产品质量评价与可靠性保障技术工业和信息化部重点实验室,广东广州㊀510610)㊀㊀摘要:文中设计了一种可弱化噪声干扰和频散效应的定位算法,采用变分模态分解方法将声发射信号分解为若干个不同频带宽度的模态函数,并通过合并含有主要能量成分的模态函数获得声发射源信号的主要成分,最后采用互相关分析方法确定声源位置㊂实验结果表明,文中所提算法对声发射源定位是有效的㊁精确的,在一维和二维AE源定位实验中,文中所提方法综合定位误差在5%以内㊂关键词:无损探伤;声发射;定位;变分模态分解;互相关分析中图分类号:TP277㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1002-1841(2021)05-0096-05AcousticEmissionSignalAnalysisandSourceLocalizationMethodResearchTONGGuo⁃wei,ZHOUXun⁃dao,HUANGLin⁃yi,CHENChao⁃ying,XUHua⁃wei,YANGLin(The5thElectronicResearchInstituteofMinistryofIndustryandInformationTechnology,KeyLaboratoryofMIITforIntelligentProductsTestingandReliability,Guangzhou510610,China)Abstract:Thispaperdesignedalocalizationalgorithmthatcanweakennoiseinterferenceanddispersionphenomenon.Thevariationalmodaldecompositionmethodwasusedtodecomposetheacousticemissionsignalintoseveralmodalfunctionswithdif⁃ferentfrequencybandwidths.Themaincomponentsofthesignalwereobtainedbycombiningthemodalfunctionswhichcontainthemainenergycomponents,andfinallythecross⁃correlationanalysiswasusedtodeterminethesourcelocation.Experimentalresultsshowthatthealgorithmproposedinthispaperiseffectiveandaccurateforthesourcelocation,thecomprehensivelocationerroroftheproposedmethodislessthan5%intheoneandtwodimensionalacousticemissionsourcelocalizationexperiments.Keywords:nondestructivetesting;acousticemission;location;variationalmodaldecomposition;crosscorrelation0㊀引言声发射(acousticemission,AE)是一种由于裂痕扩展㊁摩擦㊁微动㊁冲击而产生的物理现象,通过定位AE源可实时监测㊁评估裂痕和损伤的状态,能够达到预防和控制潜在危险及确保监控对象安全运行的功能㊂由于其具有快速㊁无损㊁低能耗等特点,现已广泛应用于地震㊁爆炸㊁航空㊁军事㊁桥梁㊁隧道㊁矿山和能源等领域[1-2]㊂1912年,Geiger最先提出了一种基于地震波到达时间确定震源的方法[3]㊂受其启发,学术界涌现出了众多定位方法,并广泛地应用于工程领域中㊂针对现有AE源定位算法不能始终获得多层圆柱介质精确结果的问题,作者提出了一种考虑折射的AE源定位方法㊂实验结果表明,新方法可以在双层圆柱表面介质中获得准确的声发射源位置[4]㊂作者针对固定的弹性波速度和结构几何不规则性等问题,提出了一种没有预先测速的A∗定位方法㊂实验结果表明对于不规则的二维复杂结构,其定位精度得到了显著提高[5]㊂上述方法推动了AE定位技术的发展,但是这些方法在设计时未考虑到在工程实际应用过程中存在的环境测量噪声,同时也未考虑在非理想㊁非均匀㊁非完全弹性介质中传播的波会发生的频散现象,上述问题均会降低定位算法的准确性㊁可靠性,或者导致定位到现实中不存在的源㊂研究表明,通过信号分解方法将原始AE源信号按频率特征进行分解,并选择性地选取用于计算定位信息信号的验算策略可有效地弱化噪声和频散现象的不利影响㊂变分模态分解(variationalmodaldecomposition,VMD)方法[6]可通过非迭代的方式实现按最小估计带宽对信号的分解,借助信号能量分析方法可选择出用于计算定位信息的分量信号㊂因此,本文提出了一种融合了VMD方法和互相关分析方法的AE源定位算法㊂VMD方法将AE信号分解为若干个具有最小估计带宽的分量信号,能量分析方法挑选出信号的主要成分,互相关分析获得2个AE传感器之间的时间差,进而计算得出声源距离AE传感器的距离信息,实现了对声源准确㊁可靠的定位㊂㊀㊀㊀㊀㊀第5期童国炜等:声发射检测信号分析及源定位方法研究97㊀㊀1㊀声发射及定位原理1.1㊀声发射如图1所示,AE系统包括3个部分:AE传感器㊁信号放大器和信号分析系统㊂AE系统在工作过程中,声源产生的瞬时弹性波以工程材料作为介质传播到材料表面,然后与材料表面放置的AE传感器进行耦合,通过压电效应将声波转换为电信号,最后经放大㊁采集可得到数字化信号,并采用适当的分析方法得到AE源的信息㊂图1㊀AE系统架构图1.2㊀定位当测量材料产生连续或间断的AE信号时,通过采集多个AE传感器中的信号,可分析出声发射源的位置及其他信息㊂图2以一维测量模型为例演示了定位算法㊂图2㊀AE一维定位模型一维模型一般存在2个或2个以上AE传感器[7],图2仅示意存在2个传感器的情况㊂设声发射源所产生的信号分别经过t1和t2时间达到传感器1和2,声音在材料中传播速度为v,可得如下关系:d=D-vΔt2Δt=t2-t1ìîíïïï(1)式中:d为AE源到传感器1的距离,m;D为传感器1㊁传感器2的距离,m;Δt为AE源到达传感器1㊁传感器2的时间差,s㊂当已知声波的传播速度v和Δt时,即可得到d,从而确定AE源的位置信息㊂本文采用Nielsen⁃Hsu实验确定值为3446m/s㊂采用互相关分析估计时延Δt,该方法计算速度快㊁运行损耗小㊂假设两侧传感器采集的AE信号分别为x(t)和y(t),则对应的数学模型如下所示:x(t)=s(t)+n1(t)y(t)=as(t-Δt)+n2(t){(2)式中:s(t)为AE源的信号;a为衰减参数;n1(t),n2(t)为环境噪声㊂在某一时间段T内,互相关系数为R(xy(Δt)=1TʏT0as(t)s(t-Δt)dt(3)观察式(3)可知,2个声发射信号是延迟时间Δt的函数,因此互相关系数分布的峰值点表示2个信号最大相关的位置,同时也代表了信号传播时差㊂基于一维定位模型理论,二维定位模型通过布置于平面内3个或3个以上传感器所获取的信息对AE源进行定位[8]㊂当获得1对传感器信息后,可在平面内获得1条双曲线函数,如图3(a)所示㊂当获得2对传感器信息后,即可在平面内确定2个声源点,如图3(b)所示㊂图3㊀二维定位模型假设P点为声发射源,传播到传感器1和传感器2的时间差和距离有如下关系:PF1-PF2=vΔt(4)当采集3个AE传感器的信号后,声发射源的位置会处于2条双曲线上的交叉点上㊂因此,需采集3个及3个以上AE传感器的信号才可以确定二维平面内声发射源的位置,如图3(b)所示,P1和P2为2条双曲线的交点,声发射源的位置在其中之一,选取时根据实际情况进行选择㊂1.3㊀信号预处理由于环境噪声和频散效应对声波的影响,直接使㊀㊀㊀㊀㊀98㊀InstrumentTechniqueandSensorMay.2021㊀用采集到的原始AE信号计算互相关系数,并查找判断延迟时间,所获得的结果会存在一定偏差㊂因此,选择合适的方法对原始信号进行有效的筛选㊁分析㊁优化是提高定位精确性和可靠性的关键㊂在信号分析领域中,VMD是基于信号时频特征的分解方法,通过非迭代的方式将信号分解为若干个拥有不同带宽的模态函数(modefunction,MF)㊂该方法认为每个MF分量有且只有一种频率成分构成,分解过程是寻求若干个MF,同时要保障每个MF所包含的带宽最小[6]㊂对于序列x(t),VMD可分解出K个MFuk(t),k=1,2, ,K:x(t)=ðKk=1uk(t)(5)MFuk(t)定义为uk(t)=Ak(t)cos[ϕk(t)](6)式中:Ak(t)为uk(t)的幅值;ϕk(t)为uk(t)的相位㊂对uk(t)使用Hilbert变换,可得解析信号及其单边谱:[σ(t)+jπt]uk(t)(7)通过指数调谐,即乘以e-jwkt,将估计uk(t)的中心频率移到基频附近:{[σ(t)+jπt]uk(t)}e-jwkt(8)式中wk为中心频率,wk=ϕᶄk(t)㊂带宽B[uk(t)]可通过解调信号的H1高斯平滑度进行估计:B[uk(t)]=∂t[σ(t)+jπt)uk(t)]e-jwkt22(9)最终,得到一个变分优化问题:minuk,wk{ðKk=1∂t[(σ(t)+jπt)uk(t)]e-jwkt22}s.t.ðKk=1uk(t)=x(t)(10)原始文献采用交替迭代乘子法进行求解㊂观察可知,VMD方法采用优化策略一次性获得所有分量,而且各MF的中心频率和带宽可被自适应计算出的同时,实现了对序列的频域剖析和MF分离㊂2㊀实验研究本文设计了AE定位测试系统,由3个AE传感器㊁3个前置放大器㊁1个8通道的数据采集卡㊁1个PC机,1个镀锌钢板组成㊂镀锌钢板长㊁宽为500mm,厚度为2mm,通过敲击产生AE源㊂实验模型如图4所示㊂镀锌钢板固定于桌面,3个AE传感器通过磁吸附的方法固定于镀锌钢板表面,AE传感器通过前置放大器与数据采集卡相连㊂图4㊀实验模型根据文献报道,敲击震动信号的峰值频率较低,因此,本文选用窄带低频的AE传感器采集声信号,相关参数列于表1㊂表1㊀传感器参数表谐振频率/kHz带宽频率/kHz灵敏度/dB尺寸/mm4020 11080Φ17ˑ16㊀㊀设计了针对一维和二维定位模型的实验,每种实验情况的传感器摆放方式和敲击位置又设定了不同的组合,通过组合可得4种实验情况,图5展示了传感器和敲击位置的具体坐标,表2列举了4个测试案例㊂㊀图5㊀实验布置图表2㊀实验分类模型类型敲击位置案例1一维敲击位置1案例2一维敲击位置2案例3二维敲击位置1案例4二维敲击位置23㊀实验结果分析本小节分别对4个案例进行实验测量,并采用本文所提方法确定AE源位置,对其有效性㊁精确性㊁可靠性进行验证㊂3.1㊀信号分析以案例1为例,图6为AE传感器1㊁传感器2接收到的声信号,相应的VMD分解结果如图7所示㊂㊀㊀㊀㊀㊀第5期童国炜等:声发射检测信号分析及源定位方法研究99㊀㊀图6㊀案例1信号在案例1中,原始信号被分为4个模态函数,在时域波形中,MF的幅值会逐渐减小,同时频带会升高㊂因此,具有较低信号幅值和较高频率的MF分量可以被认为是噪声干扰而忽略不计㊂同时,每个MF的能量EIMFi和相应的能量比RIMF由下式进行量化:EIMFi=1NðNm=1xi(m)2(11)(a)传感器1信号的MF图㊀㊀㊀(b)传感器1信号MF的频域图(c)传感器2信号的MF图㊀㊀㊀(d)传感器2信号MF的频域图图7㊀分解结果RIMF=EIMFiðXi=1EIMFiˑ100%(12)式中xi(m)为第i个MF中第m个时间序列点的数值㊂图8显示了案例1中2个AE传感器接收到声信号MF的能量比㊂如图8所示,前3个MF几乎包含整个信号能量的98%,可以完全反映原始信号的主要信息㊂因此,MF1㊁MF2㊁MF3可用于重建AE信号的主要成分,而其他能量较低的成分可以忽略不计㊂3.2㊀一维定位模型合并2个AE传感器信号前3个MF,由式(3)计算2个信号的互相关系数,并从峰值处获得时间差,通过式(1)计算出声发射源的位置㊂案例1-2的相关系数曲线如图9所示,定位结果列于表3㊂表3㊀一维模型声发射源定位结果案例d1/mmD/mmΔt/ms式(1)结果/mm绝对误差/mm相对误差/%1803400.05182.512.513.132240340-0.088231.418.593.58根据实验结果可知,本文设计的定位算法能够实现AE源的定位,且具有较高的定位精度,在案例1,2的实验中,相对误差可达到3.13%,3.58%,满足实际应用要求㊂3.3㊀二维定位模型基于一维定位模型的计算方法,采用2对AE传感器的数据,通过双曲线方法可实现二维平面内的AE源定位,结果如表4所示(坐标原点在图5的左下角)㊂通过2组二维平面AE源定位实验,可验证本文所提方法对二维平面AE源定位是有效的㊁精确的,实际计算结果的横纵坐标定位误差在5%以内㊂㊀㊀㊀㊀㊀100㊀InstrumentTechniqueandSensorMay.2021㊀(a)传感器1各MF能量比(b)传感器2各MF能量比图8㊀案例1MF能量比(a)案例1相关系数曲线(b)案例2相关系数曲线图9㊀互相关分析曲线表4㊀二维模型声发射源定位结果案例AE传感器位置坐标/mm1号2号3号实际AE源坐标/mm双曲线法计算结果/mm绝对误差/mm相对误差/%3(80,420)(240,460)(420,420)(160,140)(164.4,134.4)(5.4,5.6)(3.3,4.1)4(80,420)(240,460)(420,420)(420,320)(407.4,329.1)(12.6,9.1)(3.1,2.8)4㊀结论为了减小AE源定位过程中测量环境噪声和频散现象对定位结果的干扰,本文研究了VMD方法在AE源定位中的应用方法,通过对原始AE信号按最小带宽进行分解,提取主要能量分量的和,并采用互相关分析确定AE源位置㊂一维和二维AE源定位实验结果表明本文所提方法综合定位误差在5%以内,可实现精确的AE源定位计算,为AE源定位研究提供了一种可行的研究方法㊂参考文献:[1]㊀王清琳,程珩,靳宝全.管网泄漏极性相关法定位研究[J].仪表技术与传感器,2015(7):94-97.[2]㊀BATTIEAG.Acousticemissionprinciplesandinstrumentation[J].JournalofAcousticEmission,1983,2(12):95-128.[3]㊀GEIGERL.Probabilitymethodforthedeterminationofearth⁃quakeepicentersfromarrivaltimeonly[J].Bull.St.Louis.Univ.,1912,8(1):60-71.[4]㊀ZHOUZ,ZHOUJ,CAIX,etal.Acousticemissionsourcelo⁃cationconsideringrefractioninlayeredmediawithcylindricalsurface[J].TransactionsofNonferrousMetalsSo⁃cietyofChina,2020,30(3):789-799.[5]㊀HUQ,DONGL.Acousticemissionsourcelocationandexperi⁃mentalverificationfortwo⁃dimensionalirregularcomplexstruc⁃ture[J].IEEESensorsJournal,2020,20(5):2679-2691.[6]㊀DRAGOMIRETSKIYK,ZOSSOD.Variationalmodedecom⁃position[J].IEEETransactionSignalProcess,2014,62(3):531-544.[7]㊀王少峰,刘朋真,王建国,等.基于小波包熵与Gabor小波变换的管道连续型泄漏源定位[J].仪表技术与传感器,2017(9):98-102.[8]㊀王银玲,李华聪.声发射检测仪多路数据采集模块[J].仪表技术与传感器,2015(6):41-43.作者简介:童国炜(1988 ),工程师,博士,主要从事数值优化㊁逆问题求解㊁人工智能及相关领域问题的模型构建和求解㊂E⁃mail:tongguowei188@163.com通信作者:杨林(1965 ),高级工程师,主要从事检测认证技术研究与管理工作㊂E⁃mail:lynny@ceprei.biz。
1248 音响技术关于声源的定位□王鑫 常京生 [摘 要] 明确人耳是如何对声源进行定位,是从事虚拟环绕声研究的关键。
文中对双耳效应、耳廓效应及优先效应等诸多方面进行了分析,总结了人耳对声源的定位机理。
[关键词] 虚拟环绕声;时间差;强度差;优先效应;混响半径 近年来,随着计算机技术,数字信号处理技术等方面的不断发展,虚拟环绕声技术得到了较大的发展和日益广泛的应用。
而虚拟环绕声的基础是声源定位机理和听觉传输机理,笔者将针对影响声源定位的诸多因素进行详细的阐述。
声源定位和定位依据在自然听音中,人类听觉系统对声源的定位,取决于多个因素。
双耳的信号差异用来决定声源的水平位置。
由外耳对高频信号的反射所引起的耳廓效应决定声源的垂直位置。
人耳除了可以估计声源的位置,还可以利用响度特性来估计声源的距离。
而人耳的某些心理声学特性对于声源的定位也起到很大的作用。
所有的这些因素都可以用人头传递函数(HR TF )表示。
下面将逐一详细阐述。
11双耳效应在自然听音环境中,双耳信号之间的差异对于声源的定位是非常重要的。
该因素可以在无混响的听音环境中得到最好解释,如图1所示。
图1 声源S 与镜像声源S ′声源位于水平面上的方向角为α,与人头中心的距离为r ,到达左右耳的距离分别为SL 和S R 。
若声源位于人体的右侧,则SL >SR ,声音首先到达右耳,从而在到达双耳的时间先后上形成时间差。
这种时间差被定义为双耳时间差(I T D ),它与声源的方位角α有关。
当α=0°时,I T D =0;当α=±90°时,I T D 达到最大值,对一般人头来说,在016~017ms 的量级。
在低中频(f 约小于115k Hz )的情况下,双耳时间差是定位的主要因素,这时,对一定频率的声音,双耳时间差与双耳相位差是对应的。
然而对于更高的频率,虽然双耳时间差的概念依然正确,但双耳相位差的概念将变得模糊不清。
试验研究ND T 无损检测 8年第3卷第3期高速撞击的声发射源定位刘武刚1,2,庞宝君1,孙 飞1,2,张 伟1(1.哈尔滨工业大学空间碎片高速撞击研究中心,哈尔滨 150080;2.北京强度环境研究所,北京 100076)摘 要:当高速运行的空间碎片撞击到在轨运行的航天器时,会对结构产生损伤,如果能够判断撞击的位置及产生损伤的严重程度,就可以及时采取相应的措施保证航天器和航天员的安全。
通过利用高速弹丸撞击铝板产生的损伤模拟上述撞击,采用声发射检测技术,对撞击事件的定位进行了探索。
在试验过程中,采集弹丸高速撞击铝板产生的撞击信号,并对应力波到达各个声发射传感器的时差进行分析,通过二维矩形平面定位算法,对损伤部位进行了初步定位。
试验结果表明,声发射在撞击源定位方面具有适用性。
关键词:声发射检测;空间碎片;高速撞击;源定位中图分类号:TG 115.28 文献标识码:A 文章编号:100026656(2008)0320168203Acoust ic Emission Detect ion and Loca tion for Hypervelocity Impa ctsL I U Wu 2G ang1,2,PANG Bao 2Jun1,SUN Fe i 1,2,ZHANG Wei1(1.Hype rvelocity Impact Re search Cente r ,Har bin Institute of Technology ,Har bin 150080,China ;2.Beijing Institute of Structure and Environment Engineering ,Beijing 100076,China )Abstract :There is already so much space debris in low or bit s t hat it poses a significant threat to satellites and othe r spacecraft s in orbit.The satellites a nd the spacecraf ts will lose their f unctions whe n space de bris impacts on t he key part s of them.Hy pe rvelocity impact s on aluminum plate s are utilized to simulate t he impacts resulted f rom space debris.Acoustic emission (A E )analysis is used for cha racterization and loca tio n for hypervelocit y Impacts.Two differe nt Acoustic Emission (AE )sensors are used to de tect t he a rrival time and signals of the hits.Hyper velocity Impacts a re generated with a two 2sta ge light 2gas gun f iring small aluminum ball projectile s (3.97mm ,6.35m m).In t he impact studie s ,the results ma ke clear s tha t t he location obtained by t he resonant R15sensor s are as excelle ntly accurate to these obtained by wide band se nsor s.The multi 2source impact simultaneously is obser ved during t he impact s in that it is diffic ult for the current conventional localized 2algorithm to locate the s o urce s.Keyw or ds :Acoustic emission testing ;Space de bris ;Hypervelocity impact ;Localization 在过去的几十年中,人类探索太空取得了令人瞩目的成就。
声发射检测中利用能量进行定位的新方法朱祥军【摘要】声发射检测过程中,对缺陷的定位是重要的一个步骤,传统的声发射检测利用时差定位方法,而时差定位里重要的参数是声速.通过推导,得到一种利用声衰减特性和能量参数对声发射源进行定位的新方法,并用声发射仪对普通钢件以铅笔芯折断作为模拟源进行测试,证明这种无需声速测量的新方法可行,且准确性可以得到保证.该方法的提出为声发射定位技术拓展了新方向,对提高声发射检测质量有一定的帮助.%Defect location is very important for acoustic emission (AE) testing.Generally, sound velocity is usually used for the testing of TDOA location.In this work, a new location method was proposed on the basis of attenuation rule for waves propagation and energy for acoustic emission ing the method, experiment tests showed that the defects could be located accurately with the determination of sound velocity unnecessary.The method provides a new technology direction for acoustic emission location, and it can help to improve the quality of acoustic emission testing.【期刊名称】《中国测试》【年(卷),期】2011(037)001【总页数】3页(P18-20)【关键词】声学;声发射;源定位;线性;平面;能量【作者】朱祥军【作者单位】中石油川庆钻探工程公司安全环保质量检验监督研究院,四川,广汉,618300【正文语种】中文【中图分类】TB51+2;TM930.115声发射检测常用的两种定位方式是区域定位和时差定位[1-3]。
声发射源的定位方法
1.声源叠加法:
声源叠加法利用多个声源同时发出声音,在接收端通过分析各个声源
的声音特征来确定声源的位置。
这种方法适用于声源分布均匀、声音特征
能够区分的情况。
对于每一个声源,可以通过测量声音的到达时间和幅度
来确定其与接收端的距离。
2.时差测量法:
时差测量法利用声音在传播过程中的传播速度来测量声源与接收端的
距离。
当声音从声源发出后,经过一段时间才能到达接收端,通过测量声
音的传播时间差就可以确定声源的位置。
常用的时差测量方法包括互相关法、波束形成法等。
-互相关法:将接收到的声音信号与参考信号做互相关运算,根据互
相关函数的峰值位置和幅度来确定声源的位置。
-波束形成法:利用具有多个接收单元的阵列或麦克风进行声音接收,并根据接收到的信号进行波束形成,通过测量到达时间差来确定声源的位置。
3.幅度比测量法:
幅度比测量法利用声音在传播过程中的能量损失来测量声源与接收端
的距离。
声音在传播过程中会受到空气衰减、散射等因素的影响,幅度会
随距离的增加而减小。
通过测量接收到的声音幅度比来确定声源的位置。
-三点法:利用三个接收器测量到的声音幅度比来确定声源的位置。
通过测量三个接收器之间的幅度比,可以求解出声源的位置。
4.高斯法:
高斯法采用统计学方法,通过分析接收到的声音信号的统计特性来确定声源的位置。
该方法需要进行大量的声音信号采集和处理,通过建立声音信号的统计模型来推测声源的位置。
综上所述,声发射源的定位方法包括声源叠加法、时差测量法、幅度比测量法和高斯法等。
这些方法可以单独或者结合使用,根据实际应用场景和传感器条件的不同,选择合适的定位方法来实现声发射源的定位。