直升机旋翼的陀螺效应和贝尔希拉控制
- 格式:doc
- 大小:39.00 KB
- 文档页数:7

解读直升机旋翼头的奥秘遥控直升机可说是所有遥控模型里头最为复杂的一个项目,各细节的关连性更是环环相扣,其中最复杂的结构莫过於旋翼头的设计,旋翼头也是性能的主要取决性,本章针对於主旋翼结构对性能的影响作深入的分析,直升机迷们不可错过!决定性能的旋翼头决定遥控直升机机体特性的几个要素里项,旋翼头所占的比例相当高。
要如何分辨机体特性呢?遥控直升机不像飞机一样,可以从外形上直接分辨出特级机、练习机、象真机,直升机可就不一样了,同样的旋翼头,经过不同的设定与调整,可以让性能有截然不同的表现,就算是相同的直升机,也可以安稳的适合初学者,也可以灵活的对应3D飞行,旋翼头的变化可说是相当大的。
相信有许多直升机模友们从直升机的种类,即使不曾亲身试飞过,就可以大约知道飞行的特征,对直升机性能的推断依据多半也是来自于旋翼头的造型设计,但是相信也有更多的朋友们对旋翼头的性能会有著『为什么不一样』的想法?但是想要深入研究,却又被复杂的结构打败。
这一次我们就来说明一下关於旋翼头的性能取决做一个研究。
决定性能的四大要素1、三角补偿角2、贝尔希拉比率3、修正率4、避震橡胶这四个要素的搭配,可决定大多数直升机的性格。
实际上有人测试过,将J牌的旋翼头装在H牌的直升机上面,整体飞行起来的感觉就会比较接近於J牌的感觉。
一、三角补正角一般玩家可以比较简单变更的一项。
请参考图一,以目前市面上多数韵.型态多半是主旋翼夹片球头臂在主旋翼後方(三角补正角为正角度),接著要注意的是夹片球头的部分(图二) ,当夹片球头臂太短的时候,三角补偿角便会增加,当主旋翼高转速运转时执行动作,整体旋翼面的倾斜会使的旋翼夹片会受到三角补偿角的影响增大螺距角度,使的直升机的反应迅速加快执行动作,虽然这样可以增加机体的灵活度,但是你也会同时发现直升机变的更加难以操纵,因为既使是简单的停悬动作,只要风轻轻的吹向旋翼面,直升机主旋翼会做出些微的摆荡运动,但是很容易因为三角补偿角的关系而自行产生螺距角度的变化,造成直升机会出现类似打舵的现象,因此会变的难以控制。
贝尔-希拉操纵方式的定量分析(看不懂这一章的可以直接看最下方的总结)(1)微扰动过程。
在进行定量分析之前,我将贝尔-希拉控制过程分为两类-——微扰动过程和一般过程,目的是从易到难,逐个分析,从而简化难度。
从II中,我们已经知道直升飞机的操纵主要过程是:小翼与空气产生夹角→小翼旋转平面倾斜→主旋翼与空气产生夹角→主旋翼旋转平面倾斜。
在某些情况下,比如阵风对飞机干扰时,小翼旋转平面的倾斜大大大于主旋翼平面的倾斜,所以我们就将主旋翼平面的倾斜忽略不计。
这样,只要研究小翼的运动而不必考虑主旋翼平面的转动对小翼造成的影响。
这样分析是有益的,能让我们方便地看清飞机在悬停时有风的情况下的运动方式,以及诸如转速、希拉小翼的质量分布对飞机稳定性的影响。
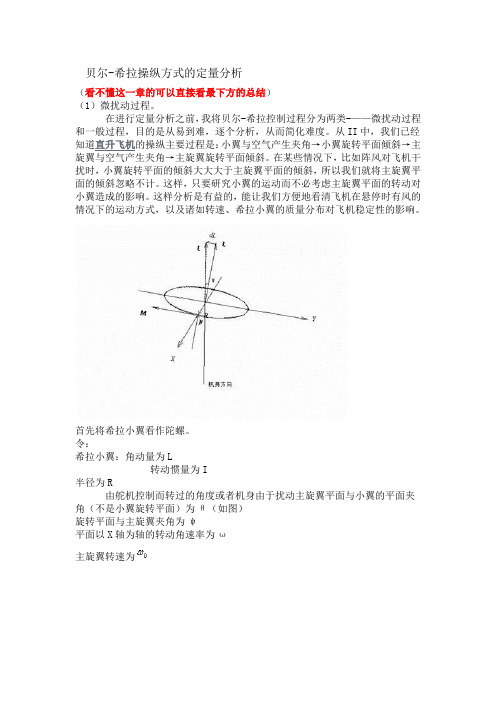
首先将希拉小翼看作陀螺。
令:希拉小翼:角动量为L转动惯量为I半径为R由舵机控制而转过的角度或者机身由于扰动主旋翼平面与小翼的平面夹角(不是小翼旋转平面)为θ(如图)旋转平面与主旋翼夹角为ψ平面以X轴为轴的转动角速率为ω主旋翼转速为∵// F是小翼与空气有夹角后受到的力。
因为是微扰动,ψ很小。
∴∴上式的意思是,主旋翼转速为,转动惯量为I的希拉小翼受到力矩M后,其平面转动速率(也可以理解为一端向上抬起的速率)-------对于同一级别的直升机,由于主旋翼转速是固定的,希拉小翼的转动惯量也是定值,所以当主旋翼转速越快,ω越小,也就是希拉小翼上抬的速率越小,或者说直升机在悬停时遇到风的情况就越稳定。
对于90级直升机,其希拉小翼的转动惯量I大于50级直升机。
所以也就比50级稳定。
上式充分说明了直升机的转速以及希拉小翼+平衡杆的转动惯量的大小与直升机的稳定性成正比。
大直升机稳定性的根源就在于此。
为了了解直升机的运动状态,光有上式是不够的。
因为M会随着直升机姿态的恢复而变化。
不同品牌,不同型号的直升机,M的变化方式不同。
比如,有的直升机在收到扰动后恢复姿态时,M一开始变化很快,后来逐渐变慢;而有的是M的变化趋于平稳。
自从莱特兄弟发明飞机以来,人们一直为能够飞翔蓝天而激动不已,同时又受起飞、着落所需的滑跑所困扰。
在莱特兄弟时代,飞机只要一片草地或缓坡就可以起飞、着陆。
不列颠之战和巴巴罗萨作战中,当时最高性能的战斗机,战斗机也只需要一片平整的草地就可以起飞,除了重轰炸机,很少有必须用“正规”的混凝土跑道起飞、着陆的。
今天的飞机的性能早已不能为这些飞机所比,但飞机的滑跑速度、重量和对跑道的冲击,使对起飞、着陆的跑道的要求有增无减,连简易跑道也是高速公路等级的。
现代战斗机和其他高性能军用飞机对平整、坚固的长跑道的依赖,日益成为现代空军的致命的软肋。
为了摆脱这一困境,从航空先驱的时代开始,人们就在孜孜不倦地研制能够象鸟儿一样腾飞的具有垂直/短距起落能力的飞机。
自从人们跳出模仿飞鸟拍翅飞行的谜思之后,依据贝努力原理的空气动力升力就成为除气球和火箭外所有动力飞行器的基本原理。
机翼前行时,上下翼面之间的气流速度差造成上下翼面之间的压力差,这就是升力。
所谓“机翼前行”,实际上就是机翼和空气形成相对速度。
既然如此,和机身一起前行时,机翼可以造成升力,机身不动而机翼像风车叶一样打转转,和空气形成相对速度,也可以形成升力,这样旋转的“机翼”就成为旋翼,旋翼产生升力就是直升机可以垂直起落的基本原理。
中国小孩竹蜻蜓玩了有2,000 年了,流传到西方后,成为现代直升机的灵感/ 达·芬奇设计的直升机,到底能不能飞起来,很是可疑旋翼产生升力的概念并不新鲜,中国儿童玩竹蜻蜓已经有2,000 多年了,西方也承认流传到西方的中国竹蜻蜓是直升机最初的启示。
多才多艺的达·芬奇在15 世纪设计了一个垂直的螺杆一样的直升机,不过没有超越纸上谈兵的地步。
1796 年,英国人George C ayley 设计了第一架用发条作动力、能够飞起来的直升机,50 年后的1842 年,英国人W.H. Philips 用蒸气机作动力,设计了一架只有9 公斤重的模型直升机。
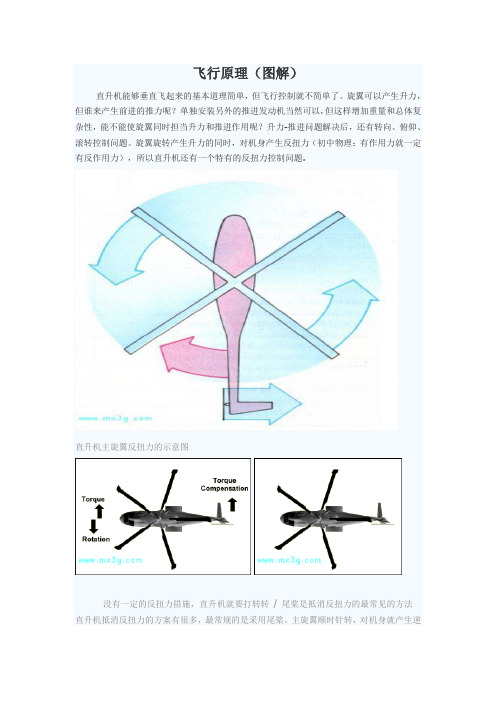
飞行原理(图解)直升机能够垂直飞起来的基本道理简单,但飞行控制就不简单了。
旋翼可以产生升力,但谁来产生前进的推力呢?单独安装另外的推进发动机当然可以,但这样增加重量和总体复杂性,能不能使旋翼同时担当升力和推进作用呢?升力-推进问题解决后,还有转向、俯仰、滚转控制问题。
旋翼旋转产生升力的同时,对机身产生反扭力(初中物理:有作用力就一定有反作用力),所以直升机还有一个特有的反扭力控制问题.直升机主旋翼反扭力的示意图没有一定的反扭力措施,直升机就要打转转/ 尾桨是抵消反扭力的最常见的方法直升机抵消反扭力的方案有很多,最常规的是采用尾桨。
主旋翼顺时针转,对机身就产生逆时针方向的反扭力,尾桨就必须或推或拉,产生顺时针方向的推力,以抵消主旋翼的反扭力.抵消反扭力的主旋翼-尾桨布局,也称常规布局,因为这最常见/ 典型的贝尔407 的尾桨主旋翼当然也可以顺时针旋转,顺时针还是逆时针,两者之间没有优劣之分。
有意思的是,美、英、德、意、日直升机的主旋翼都是逆时针旋转,法、俄、中、印、波兰直升机都是顺时针旋转,英、德、意、日的直升机工业都是从美国引进许可证开始的,和美国采用相同的习惯可以理解,中、印、波兰是从前苏联和法国引进许可证开始的,和法、俄的习惯相同也可以理解,但美国和俄罗斯为什么从一开始选定不同的方向,法国为什么不和选美国一样的方向,而和俄罗斯一致,可能只是一个历史的玩笑。
各国直升机主旋翼旋转方向的比较尾桨给直升机的设计带来了很多麻烦。
尾桨要是太大了,会打到地上,所以尾桨尺寸受到限制,要提供足够的反扭力,就需要提高转速,这样,尾桨翼尖速度就大,尾桨的噪声就很大。
极端情况下,尾桨翼尖速度甚至可以超过音速,形成音爆.尾桨需要安装在尾撑上,尾撑越长,尾桨的力矩越大,反扭力效果越好,但尾撑的重量也越大。
为了把动力传递到尾桨,尾撑内需要安装一根长长的传动轴,这又增加了重量和机械复杂性.尾桨是直升机飞行安全的最大挑战,主旋翼失去动力,直升机还可以自旋着陆;但尾桨一旦失去动力,那直升机就要打转转,失去控制.在战斗中,直升机因为尾桨受损而坠毁的概率远远高于因为其他部位被击中的情况。

直升飞机飞行原理
直升飞机的飞行原理基于伯努利定律和牛顿第三定律。
它的主要组成部分包括主旋翼、尾旋翼和机身。
主旋翼是直升飞机的主要提升力源,它类似于一个巨大的旋转翅膀。
当主旋翼旋转时,它上面的叶片会产生较高的气流速度,而下面的叶片则产生较低的气流速度。
根据伯努利定律,速度较快的气流会产生较低的压力,而速度较慢的气流则产生较高的压力。
因此,主旋翼上的气流速度差将在叶片上产生一个升力,使直升飞机能够飞行。
为了保持直升飞机的稳定,尾部安装有一个尾旋翼。
尾旋翼的主要功能是产生一个相对较小的提升力,以抵消主旋翼旋转时的扭矩力,防止直升飞机的机身旋转。
尾旋翼通过改变旋转速度和角度来控制直升飞机的转向。
除了提升力,直升飞机还需要推力来推动它的机身前进。
推进力通常由安装在机尾的推进器提供,它可以是涡轮发动机或活塞发动机。
通过控制推进器的喷气或排气来调节推力大小,直升飞机可以向前或向后移动。
此外,直升飞机还有其他控制装置,如俯仰控制和横滚控制,用于调整飞行姿态和方向。
俯仰控制通过调整主旋翼的角度来改变直升飞机的前后倾斜角度,从而控制上下运动。
横滚控制则通过改变主旋翼叶片的角度差来调整直升飞机的侧倾角度。
总之,直升飞机的飞行主要依靠主旋翼产生的升力和推力来实
现。
通过调整旋翼的角度和其他控制装置,直升飞机可以实现提升、下降、前进、后退、转向等各种飞行动作。

直升飞机工作原理
直升飞机是一种能够垂直起降并且在空中悬停的飞行器。
其工作原理基于贝尔-罗夫式旋翼系统,这是一种由一个巨大的旋
翼构成的系统,也被称为主旋翼。
主旋翼通过旋转产生了向上的升力,并将飞机提升至空中。
主旋翼通常由多个叶片组成,这些叶片通过复杂的机械结构与飞机的机身相连接。
当发动机开始工作时,主旋翼开始旋转。
通过改变旋翼叶片的角度和速度,飞行员可以控制飞机的飞行方向、高度和姿态。
为了保持平衡和稳定性,直升飞机通常配备了一枚尾旋翼,也被称为反推旋翼。
尾旋翼的主要功能是制造一个与主旋翼旋转方向相反的扭矩,以抵消主旋翼产生的旋转力矩。
这样可以保持飞机的稳定性,并防止其自身旋转。
除了旋翼系统,直升飞机还包括其他重要的组成部分。
其中包括发动机,用于为旋翼系统提供动力;航电系统,用于控制和监测各个飞机系统的运行状态;座舱,用于容纳飞行员和乘客;以及机身结构,用于支撑和保护各个组件。
总而言之,直升飞机的工作原理基于旋翼系统的运转,通过旋转产生升力以及控制飞机的飞行方向和高度。
这种独特的设计使得直升飞机能够以垂直起降的方式飞行,并在空中悬停。
遥控直升机基础飞行原理发布日期:2016-02-03简介遥控直升机的起飞、飞行、降落等各动作主要是依靠各旋翼来完成的。
主旋翼桨叶转动时会产生与空气相对的上升气流,自然形成上升力。
在利用旋翼的旋转速度与各桨叶的角度变换,致使飞机完成起飞、升高、降落等多种不同的飞行动作。
遥控直升机向前飞行,是由于各桨叶的角度在不同位置时,按固定规律变化所产生的。
旋翼产生的拉力相对于旋转轴向前倾斜,拉动遥控直升机前进。
使遥控直升机向左或向右飞行也是同样的道理。
遥控直升机飞行方向改变时,基本原理是利用尾旋翼的可变角度或(带尾马达的、速度)产生的。
因为主旋翼旋转时机身会产生扭力作用,扭力作用使机身不停的转圈,无法正常飞行。
所以必须加设一个尾旋翼来抵消扭力,平衡机身不旋转,但单靠尾旋翼来平衡是不够的,这就需要使用陀螺仪了,它可以根据机身的摆动多少,自动作出补偿给伺服器(舵机),去改变尾旋翼角度,平衡机身。
当你了解遥控直升机的飞行与控制原理后,相信无论在调整方面或在飞行上都会有很大的帮助。
理论模型无线电遥控直升机可以说是遥控模型中的极品,许多航模爱好者都渴望拥有自己的遥控直升机。
遥控直升机利用主旋翼的转动,产生与空气的相对运动,造成升力将机身升起,配合发动机的动力,利用微妙的机械操作,改变主桨及尾桨角度,令机身升、降、横向飞行、翻滚、打转等多种不同动作,甚至翻转倒飞,作令人意想不到的动作花式。
当你能够控制它离开地面悬浮于空中时那种兴奋的心情是难以形容的。
但由于其昂贵的造价和复杂的操纵,使得许多爱好者望而却步。
近年来,遥控直升机技术的不断发展和深入,使得遥控直升机的价格越来越经济和低廉,让越来越多的模型爱好者接触到遥控直升机模型。
但是由于遥控直升机飞行时是处于三维立体环境当中,所以在操纵上不同于其它遥控模型:直升机是浮在空中的,方向、高度掌握非常重要,它是所有遥控模型中最难于学习控制的。
要飞好遥控直升机须先从遥控直升机的飞行原理入手,以下简要介绍了遥控直升机的的飞行原理,希望对众多的爱好者有所帮助。
发一套最完整的直升机原理(绝对完整,绝对精华)这是我找到的最完整,最系统介绍直升机的原理及发展史的文章。
转到这里,送给论坛里喜欢飞行,向往蓝天的朋友!!自从莱特兄弟发明飞机以来,人们一直为能够飞翔蓝天而激动不已,同时又受起飞、着落所需的滑跑所困扰。
在莱特兄弟时代,飞机只要一片草地或缓坡就可以起飞、着陆。
不列颠之战和巴巴罗萨作战中,当时最高性能的“喷火”战斗机和Me 109战斗机也只需要一片平整的草地就可以起飞,除了重轰炸机,很少有必须用“正规”的混凝土跑道起飞、着陆的。
今天的飞机的性能早已不能为这些飞机所比,但飞机的滑跑速度、重量和对跑道的冲击,使对起飞、着陆的跑道的要求有增无减,连简易跑道也是高速公路等级的。
现代战斗机和其他高性能军用飞机对平整、坚固的长跑道的依赖,日益成为现代空军的致命的软肋。
为了摆脱这一困境,从航空先驱的时代开始,人们就在孜孜不倦地研制能够象鸟儿一样腾飞的具有垂直/短距起落能力的飞机。
自从人们跳出模仿飞鸟拍翅飞行的谜思之后,依据贝努力原理的空气动力升力就成为除气球和火箭外所有动力飞行器的基本原理。
机翼前行时,上下翼面之间的气流速度差造成上下翼面之间的压力差,这就是升力。
所谓“机翼前行”,实际上就是机翼和空气形成相对速度。
既然如此,和机身一起前行时,机翼可以造成升力,机身不动而机翼像风车叶一样打转转,和空气形成相对速度,也可以形成升力,这样旋转的“机翼”就成为旋翼,旋翼产生升力就是直升机可以垂直起落的基本原理。
中国小孩竹蜻蜓玩了有2,000 年了,流传到西方后,成为现代直升机的灵感/ 达·芬奇设计的直升机,到底能不能飞起来,很是可疑旋翼产生升力的概念并不新鲜,中国儿童玩竹蜻蜓已经有2,000 多年了,西方也承认流传到西方的中国竹蜻蜓是直升机最初的启示。
多才多艺的达·芬奇在15 世纪设计了一个垂直的螺杆一样的直升机,不过没有超越纸上谈兵的地步。
1796 年,英国人George C ayley 设计了第一架用发条作动力、能够飞起来的直升机,50 年后的1842 年,英国人W.H. Philips 用蒸气机作动力,设计了一架只有9 公斤重的模型直升机。
直升机陀螺仪原理一、引言直升机陀螺仪是一种用于控制直升机姿态的重要装置,它通过感知直升机的姿态变化,并根据原理进行反馈控制,从而使直升机保持平衡和稳定飞行。
本文将介绍直升机陀螺仪的原理及其应用。
二、陀螺仪的基本原理陀螺仪是利用陀螺效应来测量和感知物体的姿态变化的装置。
在直升机陀螺仪中,通常使用旋转的陀螺作为感知元件。
当直升机发生姿态变化时,陀螺会受到力的作用而产生偏转,通过测量陀螺的偏转角度,可以得知直升机的姿态变化情况。
三、陀螺仪的工作原理直升机陀螺仪的工作原理可以简单概括为以下几个步骤:1. 陀螺的安装和校准:陀螺通常安装在直升机的特定位置,以确保能够准确感知直升机的姿态变化。
在安装完成后,需要进行校准,以消除任何偏差和误差。
2. 陀螺的旋转:陀螺仪中的陀螺会以高速旋转,通常使用电机或气流驱动。
旋转的陀螺具有惯性,即在没有外力作用下,会保持自身的旋转方向和速度。
3. 陀螺的姿态感知:当直升机发生姿态变化时,陀螺会受到力的作用而产生偏转。
这是因为陀螺具有惯性,当直升机发生倾斜时,陀螺的旋转轴也会发生偏转。
4. 偏转角度的测量:通过陀螺仪中的传感器,可以测量陀螺的偏转角度。
这些传感器可以是基于光电效应、电容效应或其他原理的装置,用于将陀螺的偏转转化为电信号。
5. 姿态控制系统的反馈:测量到的偏转角度会通过反馈回路传输到姿态控制系统中。
姿态控制系统会根据陀螺的偏转角度来调整直升机的控制面,以使直升机恢复平衡和稳定飞行。
四、直升机陀螺仪的应用直升机陀螺仪主要应用于直升机的自动驾驶系统和稳定控制系统中。
通过感知直升机的姿态变化,陀螺仪能够提供准确的姿态数据,帮助自动驾驶系统进行航向控制、高度控制和稳定飞行。
直升机陀螺仪还可以用于提高直升机的飞行精度和稳定性。
在飞行中,直升机会受到风力、气流和操纵输入等外界因素的影响,导致姿态的变化。
陀螺仪可以感知这些变化,并通过姿态控制系统进行调整,使得直升机能够保持平衡和稳定飞行。
黑鹰直升机遥控飞机的原理
黑鹰直升机遥控飞机的原理与实际的黑鹰直升机相似,只是在飞行中的控制由人工遥控器来完成。
原理如下:
1. 通信:遥控器与飞机之间通过无线通信建立连接。
遥控器上的操纵杆的位置和动作通过无线信号传输给飞机的控制系统。
2. 控制系统:飞机上的控制系统接收到来自遥控器的指令。
指令可包括飞行方向、速度、高度、转弯等飞行状态的改变。
控制系统解析指令并控制相应的飞行器件进行动作。
3. 电动机:飞机上的电动机提供动力,使飞机的旋翼旋转,从而产生升力。
电动机通过电子速度调节器进行调速,根据指令改变电机的转速。
4. 陀螺仪:飞机上的陀螺仪用于感知飞机姿态的变化,包括俯仰角、横滚角和偏航角等。
陀螺仪会根据飞行姿态的变化提供反馈给控制系统,控制系统通过调整飞机的电机转速和舵面位置来保持飞机的平衡和稳定。
5. 舵面:飞机上的舵面,如副翼和方向舵,通过控制电机转速或调整舵面的位置来改变飞机的姿态和飞行方向。
这些组件相互配合,使得遥控飞机能够根据遥控器上的指令进行飞行。
当飞机接收到指令后,控制系统会调整电机转速和舵面位置来实现飞机的姿态调整和飞行动作。
直升机旋翼的陀螺效应和贝尔希拉控制直升机旋翼的陀螺效应和贝尔希拉控制各位大虾,关于直升机旋翼的陀螺效应和贝尔希拉控制,我有一个疑问向大家请教。
直升机的旋翼可以被看成是一个大的陀螺,按照陀螺效应的原理,在陀螺系的旋转平面内平行于转轴施加一个离轴的力,该力对陀螺系的作用点将沿着旋转方向滞后90度作用于陀螺系。
在模型直升机上,如果使用两叶桨,我们会用一个希拉小翼来控制直升机的飞行姿态。
问题是:1、对于三翼或更多桨翼的直升机,在桨翼转速不超过600RPM时,会有陀螺效应发生吗?2、如有的话,是否意味着直升机向前飞行时,最大桨距是在90度处(假定机头方向为0度)?3、对于共轴反桨直升机,由于上下桨翼的旋转方向相反,如果上下桨翼的最大桨距出现在同一点,由于陀螺效应,岂不是会发生作用力平衡的现象?终于找到答案了根据直升机的飞行原理可知,直升机的飞行控制是通过周期变距改变旋翼的桨盘锥体从而改变旋翼的总升力矢量来实现的,由于旋翼的气动输入(即周期变距)与旋翼的最大响应(即挥舞),其方位角相差90°,当旋翼在静止气流中旋转时,以纵向周期变距为例,上旋翼在90°时即前行桨叶处得到纵向周期变距输入,此时上旋翼为逆时针旋转,对上旋翼来说将在180°时得到最大响应,即挥舞最大。
而对下旋翼而言,上旋翼的前行桨叶方位处是下旋翼的后行桨叶方位,此时下旋翼为顺时针旋转,其桨叶前缘正好与上旋翼相反,对上旋翼的最大输入恰好是对下旋翼的最小输入,下旋翼将在0°处达到最小挥舞响应。
而在下旋翼的前行桨叶处(上旋翼的后行桨叶)达到最大输入,在180°处达到最大挥舞。
因此,上下旋翼在纵向周期变距的操纵下的挥舞平面是基本平行的。
类似的在给出横向周期变距操纵后,在上下旋翼的方位角0°、180°处对上下旋翼均给出同样的操纵输入,但由于两旋翼的转向相反,翼剖面的前后缘反向,因而,一个是最大输入对另一个是最小输入,两旋翼的最大响应和最小响应相差180°,其挥舞平面也是平行的。
因此,共轴式直升机的上下旋翼的自动倾斜器是通过若干拉杆组成连杆机构,该机构使得上下旋翼的自动倾斜器始终保持平行。
以下是我找到的全文,转给大家。
[科普] 共轴双旋翼直升机的技术特点及发展阴谋制造者发帖于:空军论坛发布时间:2010-1-14 21:29:32复制链接收藏查看原帖【共18条评论】【浏览1076IP】共轴双旋翼直升机具有绕同一理论轴线一正一反旋转的上下两副旋翼,由于转向相反,两副旋翼产生的扭矩在航向不变的飞行状态下相互平衡,通过所谓的上下旋翼总距差动产生不平衡扭矩可实现航向操纵,共轴双旋翼在直升机的飞行中,既是升力面又是纵横向和航向的操纵面。
共轴双旋翼直升机的上述特征决定了它与传统的单旋翼带尾桨直升机相比有着自身的特点。
20世纪40年代初,这种构形引起了航空爱好者极大的兴趣,并试图将其变成可实用的飞行器,然而,由于当时人们对共轴双旋翼气动特性认识的缺乏以及在结构设计方面遇到的困难,许多设计者最终放弃了努力,而在很长一段时间对共轴式直升机的探讨只停留在实验阶段。
1932年,西科斯基研制成功了单旋翼带尾桨直升机VS-300,成为世界上第一架可实用的直升机。
从此,单旋翼带尾桨直升机以其简单、实用的操纵系统和相对成熟的单旋翼空气动力学理论成为半个多世纪来世界直升机发展的主流。
然而,人们对共轴双旋翼直升机的研究和研制一直没有停止。
俄罗斯卡莫夫设计局从1945年研制成功卡-8共轴式直升机到90年代研制成功被西方誉为现代世界最先进的武装攻击直升机卡-50;发展了一系列共轴双旋翼直升机,在型号研制、理论实验研究方面均走在世界前列。
美国也于50 年代研制了QH-50共轴式遥控直升机作为军用反潜的飞行平台,并先后交付美国海军700 多架。
美国西科斯基公司在70年代发展了一种前行桨叶方案(A B C)直升机,该机采用共轴式旋翼,刚性桨毂,上下旋翼的间距较小。
它利用上下两旋翼的前行桨叶边左右对称来克服单旋翼在前飞时由于后行桨叶失速带来的升力不平衡力矩,从而提高旋翼的升力和前进比,其验证机XH-59A于1973年进行试飞,并先后进行大量的风洞实验。
从20 世纪60 年代开始,由于军事上的需要,一些国家开始研制无人驾驶直升机。
近年来,无人直升机已成为国内外航空领域内的研究热点。
比较成熟的有:加拿大的CLL227,德国的“Seamos”, 美国的“QH50”。
这些无人直升机的共同特点是均采用了共轴双旋翼形式。
在实验方面,从20 世纪50 年代起,美国、日本、俄罗斯等相继对共轴双旋翼的气动特性、旋翼间的气动干扰进行了大量风洞实验研究。
经过半个多世纪的发展,共轴双旋翼的旋翼理论得到不断的发展和完善,这种构形的直升机以它固有的优势越来越受到业内人士的重视。
北京航空航天大学于上世纪80年代开始研制共轴式直升机,并先后研制了“海鸥”共轴式无人直升机、M16 单座共轴式直升机、M22、FH-1小型共轴式无人直升机。
其中FH-1小型共轴式无人直升机已在电力部门、科研院所等单位应用。
该机目前已实现了从起飞到降落的无人驾驶自主飞行,可载20kg任务载荷,飞行1.5h。
共轴式直升机的总体结构特点共轴式直升机与单旋翼带尾桨直升机的主要区别是采用上下共轴反转的两组旋翼用来平衡旋翼扭矩,不需尾桨。
在结构上,由于采用两副旋翼,与相同重量的单旋翼直升机相比,若采用相同的桨盘载荷,其旋翼半径仅为单旋翼直升机的70%。
单旋翼直升机的尾桨部分必须超出旋翼旋转面,尾桨直径约为主旋翼的16% ~22%,这样,假设尾桨紧邻旋翼桨盘,则单旋翼直升机旋翼桨盘的最前端到尾桨桨盘的最后端是旋翼直径的 1.16 ~ 1.22倍。
由于没有尾桨,共轴式直升机的机身部分一般情况下均在桨盘面积之内,其机体总的纵向尺寸就是桨盘直径。
这样,在桨盘载荷、发动机和相同的总重下,共轴双旋翼直升机的总体纵向尺寸仅为单旋翼直升机的60% 左右。
共轴式直升机的机身较短,同时其结构重量和载重均集中在直升机的重心处,因而减少了直升机的俯仰和偏航的转动惯量。
在10t 级直升机上,共轴式直升机的俯仰转动惯量大约是单旋翼直升机的一半,因此,共轴式直升机可提供更大的俯仰和横滚操纵力矩。
并使直升机具有较高的加速特性。
由于没有尾桨,共轴式直升机消除了单旋翼直升机存在的尾桨故障隐患和在飞行中因尾梁的振动和变形引起的尾桨传动机构的故障隐患,从而提高了直升机的生存率。
由于采用上下两副旋翼,增加了直升机的垂向尺寸,两副旋翼的桨毂和操纵机构均暴露在机身外。
两副旋翼的间距与旋翼直径成一定的比例,以保证飞行中上下旋翼由于操纵和阵风引起的极限挥舞不会相碰。
两旋翼间的非流线不规则的桨毂和操纵系统部分增加了直升机的废阻面积,因而,共轴式直升机的废阻功率一般来说大于单旋翼带尾桨直升机的废阻功率。
共轴式直升机一般采用双垂尾以增加直升机的航向操纵性和稳定性。
一般来说,共轴式直升机绕旋翼轴的转动惯量大大小于单旋翼带尾桨直升机,因而,航向的操纵性好于单旋翼带尾桨直升机,而稳定性相对较差;由于共轴式直升机的机身较短,故增加平尾面积和采用双垂尾来提高直升机的纵向和航向稳定性。
共轴式直升机的垂尾的航向操纵效率只在飞行速度较大时方起作用。
共轴双旋翼直升机的主要气动特性共轴式直升机具有合理的功率消耗(无用于平衡反扭矩的尾桨功率消耗),优良的操纵性、较小的总体尺寸等特点。
与单旋翼带尾桨直升机相比,共轴式直升机的主要气动特点为:共轴式直升机具有较高的悬停效率;没有用于平衡反扭矩的尾桨功率损耗;尾浆在起飞、悬停状态下的功率消耗为7% ~12%;空气动力对称;具有较大的俯仰、横滚控制力矩。
据卡莫夫设计局资料称,通常共轴双旋翼直升机的悬停效率要比单旋翼带尾桨直升机高出17% ~30%。
由于上述的原因,在相同的起飞重量、发动机功率和旋翼直径下,共轴式直升机有着更高的悬停升限和爬升率。
共轴式直升机的另一个重要特性是随着升限增高,其航向转弯速度保持不变甚至有所增加。
这是由于共轴式直升机不需要额外的功率用于航向操纵,因而改善了航向的操纵效率。
增加同样的拉力所需的扭矩增量随悬停高度的增加而增加,因此,对单旋翼直升机来说,为平衡反扭矩所需的尾桨功率也需要增加,在尾桨功率供应不足的情况下使航向操纵效率减小。
而共轴式直升机不存在这样的问题。
共轴双旋翼的平飞气动特性与单旋翼也有不同,资料表明,在相同拉力和旋翼直径下,刚性共轴双旋翼的诱导阻力比单旋翼低20% ~30%。
由于操纵系统部分和上下旋翼桨毂这些非流线形状部件的数量和体积大于单旋翼直升机并暴露在气流中,因而共轴式直升机的废阻面积大于单旋翼直升机。
共轴式直升机在悬停、中低速飞行时的需用功率小于单旋翼直升机,随速度增加,需用功率逐渐增大至大于单旋翼直升机,这一特性决定了共轴式直升机有较大的实用升限、较大的爬升速度、更大的续航时间。
而单旋翼直升机则有较大的平飞速度、较大的巡航速度和飞行范围。
由于共轴式直升机具有特殊的操纵系统构件,两旋翼必须保持一定的间距,因此要将废阻面积降低到单旋翼直升机的水平很困难。
共轴式直升机在各种飞行状态下均不同程度地存在着气动干扰,表现为上旋翼对下旋翼的下洗流的影响以及下旋翼对上旋翼的流态的影响,实验和理论研究表明,在悬停和小速度前飞状态下,旋翼的相互影响使得下旋翼的下洗速度比单旋翼的要大得多,而上旋翼的下洗速度与单旋翼几乎相同,略大一些。
上旋翼的滑流流管在下旋翼处收缩至Rs(Rs<R),即下桨盘只在半径Rs以内的区域受到上旋翼下洗流的影响,而上桨盘完全处于受下桨盘作用的滑流里。
在垂直爬升时,由于上下旋翼的气动干扰,每组旋翼的轴向速度包括直升机的爬升速度、自身诱导速度和来自另一旋翼的诱导干扰速度。
因此,无论是上旋翼还是下旋翼,在气动力估算时均不能用估算单旋翼的方法进行旋翼特性估算。
早期共轴双旋翼的气动计算是按等效实度的单旋翼气动模型计算的,如上下旋翼共4片桨叶,则按4 片相同几何参数的单旋翼来估算。
后来发现这种方法与实验结果相差较大,而且由此得出的结果导致了操纵系统的设计余度不够而出现飞行事故。
因此,无论是前飞还是悬停,简单的动量法已不能用于共轴双旋翼的气动计算。
应当用比较符合旋翼流场物理现象的涡流理论或计算流体力学解决共轴双旋翼的气动计算问题。
由于上下旋翼的诱导速度不同,上下旋翼的气动特性也不同。
表现在当上下旋翼的升力相同时,上下旋翼的扭矩不同;上下旋翼的扭矩相同时,上下旋翼的升力不同。
并且上下旋翼的拉力系数和阻力系数以及上下旋翼的扭矩均随飞行状态和飞行速度而变化。
一般来说,扭矩相同的情况下,共轴双旋翼的上下旋翼在悬停状态的拉力之比为CTlow/CTupp=0.85左右,随着前飞速度的增加,在μ≥1.5时,CTupp=1.05CTlow。